
Асинхронный двигатель количество оборотов
Частота вращения вала (скорость) асинхронного двигателя (АД) напрямую связана с количеством полюсов обмотки. Количество полюсов указывается в серии не только отечественных электродвигателей, но довольно часто и в импортных двигателях. Например, АИР112М6 или W22 160M2P количество полюсов, соответственно шесть или два. Это характерно и для крановых двигателей МТН112-6 — шестиполюсной, МТН225М8 — восьмиполюсной.
Соотношение полюсов и оборотов вращения вала двигателя очень просто. Каждому числу полюсов соответствует определенная частота вращения вала АД. Если в обозначении асинхронного двигателя два полюса (2Р), то его номинальная частота вращения вала три тысячи оборотов в минуту (3000 об/мин). Если у двигателя четыре полюса (4Р), то номинальная скорость вращения выходного вала полторы тысячи оборотов в минуту (1500 об/мин). Если у асинхронного двигателя шесть полюсов (6Р), то частота вращения вала тысяча оборотов в минуту (1000 об/мин). Если у двигателя восемь полюсов (8Р), то скорость вращения вала семьсот пятьдесят оборотов в минуту (750 об/мин). У двенадцати полюсного двигателя (12Р) скорость на валу пятьсот оборотов в минуту (500 об/мин).
Кроме того, даже у многоскоростных асинхронных двигателей количество полюсов также есть в марке и оно также соотноситься с частотой вращения вала. Вообще электродвигатели могут иметь одну, две, три или четыре скорости вращения вала.
Двухскоростные двигатели могут иметь следующие соотношения количества полюсов и частот вращения вала:
— четыре и два полюса (4/2) соответствуют номинальной частоте вращения вала полторы и три тысячи оборотов в минуту (1500/3000);
— шесть и четыре полюса (6/4) соответствуют скорости вращения вала на тысячу и полторы тысячи оборотов в минуту (1000/1500);
— двенадцать и шесть полюсов (12/6) — скорости вращения вала на пятьсот и тысячи оборотам в минуту (500/1000);
— восемь и четыре полюса (8/4) — номинальной частоте семьсот пятьдесят на полторы тысячи оборотов в минуту (750/1500);
— восемь и шесть полюсов (8/6) — номинально дают семьсот пятьдесят и тысячу оборотов в минуту (750/1000).
Трехскоростные двигатели имеют следующие соотношения количества полюсов и частот вращения вала:
— шесть, четыре и два полюса (6/4/2) соответствуют тысячи, полутора и трем тысячам оборотов в минуту (1000/1500/3000);
— восемь, четыре и два полюса (8/4/2) дают семьсот пятьдесят, полторы тысячи и три тысячи оборотов в минуту (750/1500/3000);
— восемь, шесть и четыре полюса (8/6/4) соответствуют семистам пятидесяти, тысячи и полутора тысячам оборотов в минуту на выходном валу (750/1000/1500).
Четырехскоростные двигатели бывают двенадцать на восемь на шесть и четыре полюса (12/8/6/4) то есть частоты вращения вала при этом пятьсот, семьсот пятьдесят, тысяча и полторы тысячи оборотов в минуту (500/750/1000/1500).
Зная привязку частоты вращения вала к числу полюсов даже по марке совсем нетрудно определить частоту вращения выходного вала эл двигателя.
Причем, у импортных электродвигателей полюса обозначаются точно также, обозначение об/мин = rpm.
Смотрите также .
При эксплуатации любой машины не обойтись без электродвигателя. Многие покупают электродвигатель с рук без какой-либо документации. В такой ситуации возникает проблема с определением оборотов электродвигателя. Чтобы решить данную проблему, можно использовать несколько способов.
Самый простой способ определения оборотов электродвигателя – использование тахометра. Но наличие данного прибора у человека, не специализирующегося на электродвигателях, большая редкость. Поэтому существуют способы определения оборотов на глаз. Для определения оборотов электродвигателя откройте одну из крышек электродвигателя и найдите катушку обмотки. Катушек в электродвигателе может быть несколько. Выберете ту катушку, которая находится в зоне видимости и к которой проще доступ. Старайтесь не нарушить целостность электродвигателя, не доставайте детали. Не пробуйте отсоединить детали между собой.


Рассмотрите внимательно катушку и попробуйте приблизительно определить ее размер относительно кольца статора. Статор – стационарная часть электродвигателя, ротор – подвижная и вращается внутри статора. Вам не потребуется ни линейка, ни точные подсчеты. Вся процедура определяется на глаз.


Скорость вращения ротора – 3000 оборотов в минуту, если размер катушки закрывает половину кольца статора. Скорость вращения ротора – менее 1500 оборотов в минуту, если размер катушки покрывает треть кольца. Скорость вращения ротора – 1000 оборотов в минуту, если размер катушки составляет одну четвертую по отношению к кольцу.


Существует еще один способ определения оборотов по обмотке. Обмотки находятся внутри статора. Для этого необходимо подсчитать количество пазов, занимаемых секциями одной катушки. Общее количество пазов сердечника составляет количество полюсов: 2 – 3000 об/мин, 4 – 1500 об/мин, 6 – 1000 об/мин.
Все основные характеристики электродвигателя должны быть указаны на металлической бирке, располагающейся на его корпусе. Но на практике бирка или отсутствует, или информация стерлась в течение эксплуатации.
Как самостоятельно узнать число оборотов электродвигателя
Зачастую, покупая с рук электродвигатель, автовладелец (и не только) в последующем обнаруживает, что к нему нет никакой документации. В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
Пошаговая инструкция определения оборотов
1. На сегодняшний день асинхронные электродвигатели подразделяются на три группы, каждая из которых говорит об индивидуальном обращении ротора в минуту. Первая группа – электродвигатели, делающие 1000 оборотов в минуту. Стоит сразу заметить, что данная цифра немного преувеличена, так как двигатель асинхронный.
Он делает, как правило, около 950-970 оборотов, но для удобства специалисты такие цифры решили округлить. Ко второй группе относятся двигатели, количество обращений ротора которых составляет 1500 за минуту. Эта цифра так же округленная, на самом деле электродвигатель делает 1430-1470 оборотом в минуту.
Третья группа асинхронных электродвигателей – это группа, к которой относится деталь, ротор которой оборачивается вокруг себя три тысячи раз за одну минуту. Реальная цифра оборотов – 2900-2970.
2. Для того, чтобы определить обороты электродвигателя, вам сначала нужно выявить, к какой же именно из указанных выше групп он относится. Для этого откройте одну из его крышек и найдите под низом катушку обмотки. Помните, такая катушка может состоять, как из одной детали, так и из нескольких, в частности трех-четырех. Кроме всего прочего знайте, что подобных катушек в электродвигателе может быть несколько. Вам достаточно одной, до которой, чтобы рассмотреть, нужно меньше всего прикладывать усилий.
3. Внимание! Катушки между собой связаны определенными деталями, которые иногда мешают рассмотреть нужную информацию. Ни при каких обстоятельствах нельзя отсоединять ничего друг от друга. Внимательно приглядитесь к выбранной вами детали и попробуйте приблизительно определить размер катушки относительно кольца статора.

4. Данное расстояние, чтобы узнать обороты электродвигателя, вовсе не нужно определять до точности. Приблизительные расчеты подойдут вам.
Если размер катушки, примерно, закрывает собой половину кольца статора, то скорость вращения ротора – три тысячи оборотов в минуту.

Если размер катушки покрывает, приблизительно, треть самого кольца, электродвигатель будет относиться ко второй группе и, следовательно, число оборотов, которые он сможет совершать, не будет превышать отметки 1500 за минуту.

Когда размер катушки равен одной четвертой по отношению к кольцу – число оборотов электродвигателя будет 1000 оборотов за одну минуту и, соответственно, двигатель будет относиться к третьей группе.

При проектировании оборудования необходимо знать число оборотов электродвигателя. Для расчёта частоты вращения есть специальные формулы, различные для двигателей переменного и постоянного напряжения.
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.

Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.

Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
FAQ по электродвигателям
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.

Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам. При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
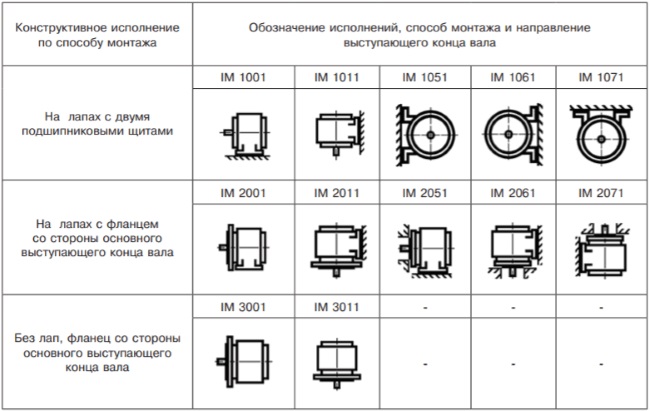
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
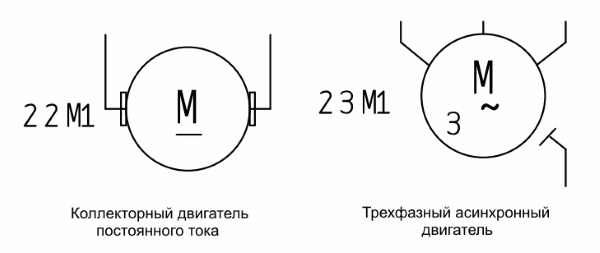
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Зависимость рабочих характеристик насоса от частоты вращения
ОБЕСПЕЧИВАЕМ ПОЛНЫЙ ЦИКЛ РАБОТ: ВЫБОР ОБОРУДОВАНИЯ-МОНТАЖ-ГАРАНТИЙНОЕ ОБСЛУЖИВАНИЕ.
Частота вращения и зависимость рабочих характеристик насоса от частоты вращения
Частота вращения насоса представляет собой число оборотов вала насоса в единицу времени, обозначается литерой n и измеряется в оборотах в минуту (об/мин). Частота вращения насосов, приводимых в действие индукционными двигателями с частотой питающего напряжения 50Гц, составляет 2750 — 2950 оборотов в минуту для 2-х полюсного двигателя и 1375 — 1475 оборотов в минуту для 4-х полюсного двигателя. Другая частота вращения вала двигателя также допускается для работы насосного оборудования при соблюдении и в пределах расчетных ограничений.
Из курса электротехники общеизвестно, что частота вращения магнитного поля в электродвигателе пропорциональна напряжению питающей цепи. При частоте напряжения в сети 50 Гц синхронная частота n1 вращения магнитного поля составляет 3000 оборотов в минуту. Так как насосы приводятся в действие в подавляющем большинстве случаев асинхронными двигателями частота вращения вала асинхронного двигателя всегда будет ниже синхронной частоты вращения магнитного поля с учетом величины скольжения. Вращение ротора асинхронного двигателя связано формулой с числом пар полюсов, скольжением и частотой питающего напряжения:
Формула показывает, что для изменения частоты вращения вала асинхронного двигателя достаточно внести изменения в количество пар полюсов (p), скольжение ротора (s) или изменить частоту питающего напряжения (f1).
Регулирование оборотов электродвигателя путем изменения числа пар полюсов позволяет получить только ступенчатое изменение скорости вращения, что часто оказывается неприемлемым для обеспечения требуемых параметров работы электронасоса. Исключение составляет ряд циркуляционных насосов, допускающих ступенчатое регулирование. Для асинхронных двигателей насосов с короткозамкнутым ротором регулирование числа оборотов двигателя изменением скольжения не применяется. Изменение частоты питающего напряжения — наиболее приемлемый, эффективный и совершенный способ регулирования, позволяющий обеспечить бесступенчатое плавное изменение гидравлических, электрических и механических характеристик электронасоса. Но на сегодняшний день этот способ регулирования требует применения дополнительного оборудования управления — преобразователя частоты асинхронного двигателя.
В отсутствии влияния кавитации на работу насоса изменение частоты вращения электродвигателя будет сопровождаться изменением характеристик насоса в соответствии с законами подобия:
1. Производительность Q пропорциональна отношению частоты вращения:
2. Манометрический напор H пропорционален отношению частоты вращения в квадрате:
3. Потребляемая мощность N пропорциональна отношению частоты вращения в кубе:
Как видно из формул подобия незначительное изменение частоты вращения вала сопровождается значительными изменениями в потреблении электроэнергии. Например, центробежный насос, работающий с питанием от сети 50 Гц, со скоростью оборотов двигателя 2950 об/мин, при уменьшении частоты в сети до 40 Гц, снизит число оборотов, соответственно, до 2360 об/мин и производительность на 20%. При этом в соответствии с законами подобия потребление энергии сократится на 50%.
Электродвигатель 1000 об/мин

Электродвигатели 1000 об/мин — трехфазные асинхронные двигатели мощностью 0,12-630 кВт. Ротор короткозамкнутый, фазный. 6 полюсов, скорость вращения вала — 880, 905, 920, 935, 960, 970, 980, 985, 990 оборотов в минуту. Промышленные электродвигатели на 1000 об/мин производятся в алюминиевых/чугунных/силуминовых корпусах. Напряжение сети – 220/380 В и 380/660 Вольт, частота 50 Гц. Монтажные исполнения лапы IM1081, фланец IM3081, комбинированные IM2081, с малым фланцем IM3681.
Электродвигатели приводят в работу — насосные агрегаты, вентиляторы, станки, компрессоры, редукторы, лифты, дробилки, бетономешалки, козловые и мостовые краны, кран-балки, лебедки, экструдеры, скребковые и ленточные конвейеры, дозаторы, шнеки, градирни, прессы. Подобрать, купить мотор 1000 оборотов по техническим характеристикам.
Каталог электродвигателей 1000 об/мин
| Мощность электродвигателя 1000 об. мин, кВт | Общепромышленные | Взрывозащищенные | ||
| Китай | НКЭМЗ, Украина | ВЭМЗ, складского хранения | ||
| 3/1000 | АИР80В6 | АМУ100S6 | 4АМ100S6 | АИММ100S6 |
| 4/1000 | АИР90L6 | АМУ112М6 | 4АМ100L6 | АИММ100L6 |
| 5,5/1000 | АИР100L6 | АМУ132S6 | 4АМ112М6 | АИММ112М6 |
| 7,5/1000 | АИР112МА6 | 6АМУ132S6 | 4АМ132S6 | АИММ132S6 |
| 11/1000 | АИР112МВ6 | 6АМУ132М6 | 4АМ132М6 | АИММ132М6 |
| 15/1000 | АИР132S6 | 6АМУ160S6 | 4АМ160S6 | АИММ160S6 |
| 18,5/1000 | АИР132М6 | 6АМУ160М6 | 4АМ160М6 | АИММ160М6 |
| 22/1000 | АИР160S6 | 4АМУ180S6 | 4АМ180S6 | АИММ180S6 |
| 30/1000 | АИР160М6 | 4АМУ180М6 | 4АМ180М6 | АИММ180М6 |
| 37/1000 | АИР180М6 | 4АМУ200М6 | 4АМ200М6 | АИММ200М6 |
| 45/1000 | АИР200М6 | 4АМУ200L6 | 4АМ200L6 | АИММ200L6 |
| 55/1000 | АИР200L6 | 4АМУ225М6 | 4АМ225М6 | АИММ225М6 |
| 75/1000 | АИР225М6 | 4АМУ250S6 | 4АМ250S6 | АИММ250S6 |
| 90/1000 | АИР250S6 | 4АМУ250М6 | 4АМ250М6 | АИММ250М6 |
| 110/1000 | АИР250М6 | 4АМУ280S6 | 4АМ280S6 | АИММ280S6 |
| 132/1000 | АИР280S6 | 4АМУ280М6 | 4АМ280М6 | АИММ280М6 |
| 160/1000 | АИР280М6 | 6АМУ315S6 | 4АМ315S6 | ВАО280М6 |
| 200/1000 | АИР315S6 | 6АМУ315М6 | 4АМ315М6 | ВАО280L6 |
| 250/1000 | АИР315М6 | 6АМУ355S6 | _________ | ВАО2 315S6 |
| 315/1000 | АИР355S6 | 6АМУ355М6 | _________ | ВАО2 315L6 |
Габариты электродвигателей 1000 об/мин:
- АИР 56
- АИР 63
- АИР 71
- АИР 80
- АИР 90
- АИР 100
- АИР 112
- АИР 132
- АИР 160
- АИР 180
- АИР 200
- АИР 225
- АИР 250
- АИР 280
- АИР 315
- АИР 355
Крепежные и присоединительные размеры
В таблице приведены основные размеры двигателей 1000 оборотов — диаметр вала, торца, отверстий на лапах, длина, фланец, высота до оси вала, расстояние креплений.

| Маркировка | Габаритные размеры электродвигателей 1000 об/мин | ||||||||||||||
| Длина двигателя | Длина вала | Диаметр вала | Высота вала со шпонкой | Размер шпонки | Ширина по лапам | Диаметр отверстий на лапах | Длина по креплению лап | Высота до оси вала | Диаметр корпуса | Высота корпуса | Расстояние по креплениям | Диаметр по отверстиям крепления | Диаметр торца фланца | Диаметр фланца | |
| L | L3 | D4 | H2 | B1 | B | D5 | L1 | H1 | D | H | L2 | D2 | D3 | D1 | |
| АИР63А6 | 250 | 30 | 14 | 16 | 5 | 124 | 5,8 | 80 | 63 | 140 | 180 | 40 | 130 | 110 | 160 |
| АИР63В6 | 250 | 30 | 14 | 16 | 5 | 124 | 5,8 | 80 | 63 | 140 | 180 | 40 | 130 | 110 | 160 |
| АИР71А6 | 270 | 40 | 19 | 21,5 | 6 | 150 | 7 | 90 | 71 | 145 | 195 | 45 | 165 | 130 | 200 |
| АИР71В6 | 270 | 40 | 19 | 21,5 | 6 | 150 | 7 | 90 | 71 | 145 | 195 | 45 | 165 | 130 | 200 |
| АИР80А6 | 310 | 50 | 22 | 24,5 | 6 | 165 | 10 | 100 | 80 | 175 | 214 | 50 | 165 | 130 | 200 |
| АИР80В6 | 310 | 50 | 22 | 24,5 | 6 | 165 | 10 | 100 | 80 | 175 | 214 | 50 | 165 | 130 | 200 |
| АИР90L6 | 360 | 50 | 24 | 27 | 8 | 180 | 10 | 125 | 90 | 195 | 250 | 56 | 215 | 180 | 250 |
| АИР100L6 | 385 | 60 | 28 | 31 | 8 | 205 | 12 | 140 | 100 | 215 | 270 | 63 | 215 | 180 | 250 |
| АИР112МА6 | 435 | 80 | 32 | 35 | 10 | 230 | 12 | 140 | 112 | 240 | 300 | 70 | 265 | 230 | 300 |
| АИР112МВ6 | 435 | 80 | 32 | 35 | 10 | 230 | 12 | 140 | 112 | 240 | 300 | 70 | 265 | 230 | 300 |
| АИР132S6 | 470 | 80 | 38 | 41 | 10 | 270 | 12 | 140 | 132 | 275 | 345 | 89 | 300 | 250 | 345 |
| АИР132М6 | 510 | 80 | 38 | 41 | 10 | 270 | 12 | 178 | 132 | 275 | 345 | 89 | 300 | 250 | 345 |
| АИР160S6 | 615 | 110 | 48 | 51,5 | 14 | 320 | 15 | 178 | 160 | 330 | 420 | 108 | 300 | 250 | 350 |
| АИР160М6 | 615 | 110 | 48 | 51,5 | 14 | 320 | 15 | 178 | 160 | 330 | 420 | 108 | 300 | 250 | 350 |
| АИР180М6 | 740 | 110 | 55 | 59 | 16 | 355 | 15 | 241 | 180 | 380 | 455 | 121 | 350 | 300 | 400 |
| АИР200М6 | 780 | 140 | 60 | 64 | 18 | 395 | 19 | 268 | 200 | 420 | 505 | 133 | 400 | 350 | 450 |
| АИР200L6 | 780 | 140 | 60 | 64 | 18 | 395 | 19 | 305 | 200 | 420 | 505 | 133 | 400 | 350 | 450 |
| АИР225М6 | 820 | 140 | 65 | 64 | 18 | 435 | 19 | 311 | 225 | 435 | 560 | 149 | 500 | 450 | 550 |
| АИР250S6 | 920 | 140 | 75 | 79,5 | 20 | 490 | 24 | 349 | 250 | 490 | 615 | 168 | 500 | 450 | 550 |
| АИР250М6 | 920 | 140 | 75 | 79,5 | 20 | 490 | 24 | 349 | 250 | 490 | 615 | 168 | 500 | 450 | 550 |
| АИР280S6 | 1025 | 170 | 80 | 85 | 22 | 550 | 24 | 368 | 280 | 580 | 680 | 190 | 600 | 550 | 660 |
| АИР280М6 | 1075 | 170 | 80 | 85 | 22 | 550 | 24 | 419 | 280 | 580 | 680 | 190 | 600 | 550 | 660 |
| АИР315S6 | 1220 | 170 | 90 | 95 | 25 | 635 | 28 | 406 | 315 | 645 | 845 | 216 | 600 | 550 | 660 |
| АИР315М6 | 1325 | 170 | 90 | 95 | 25 | 635 | 28 | 457 | 315 | 645 | 845 | 216 | 600 | 550 | 660 |
| АИР355S6 | 1560 | 210 | 100 | 108 | 28 | 730 | 28 | 500 | 355 | 710 | 1010 | 254 | 740 | 690 | 800 |
| АИР355М6 | 1560 | 210 | 100 | 108 | 28 | 730 | 28 | 500 | 355 | 710 | 1010 | 254 | 740 | 690 | 800 |
Технические характеристики двигателя 1000 об/мин

Технические требования для покупки промышленного электродвигателя 1000 оборотов в минуту:
- Количество полюсов 6
- Напряжение сети питания — 220/380 Вольт, 380/660 Вольт
- Материал корпуса – чугун, алюминий, силумин
- Схема подключения – «звезда», «треугольник», «звезда-треугольник»
- Режим работы: S1 — продолжительный, S2 — кратковременный, S3 — повторно-кратковременный
- Диапазон мощности: 0,12-630 кВт
- Степень защиты от влаги, пыли: IP 44; IP 54; IP 55; IP 56
- Категория размещения и климатическое исполнение — УХЛ, У, ХЛ, У1, У2, У3
- Сервис-фактор – коэффициент допустимой перегрузки электромотора
- Исполнение по монтажу – IM 1081, В3 лапы, IM 2081, В35 комбинированный, IM 3081, В5 фланец
- Класс нагревостойкости изоляции обмоток — F — 150°С
В стандартном исполнении электродвигатели 1000 об/мин эксплуатируются при температуре -20°С. +42°С в помещении. На улице необходим козырек, навес. Модификации — морское исполнение, для тропического климата, с повышенным скольжением. У СЛЕМЗ Вы можете купить электродвигатель 1000 об/мин по техническим требованиям, чертежам.
Определение частоты вращения двигателя
Принцип действия электродвигателя в создании вращающегося магнитного поля. Частота вращения поля прямо пропорциональна частоте переменного тока, обратно пропорциональна числу пар полюсов трехфазной обмотки. Рассчет формулой частоты вращения электродвигателя 1000 об/мин :

- n1 – частота вращения магнитного поля статора, оборотов в минуту
- f1 – частота переменного тока, Гц
- p – число пар полюсов
Частота вращения поля статора 1000 об/мин – условное среднее значение скорости вращения двигателей. Фактическая частота вращения вала – 880, 905, 920, 935, 960, 970, 980, 985, 990 об/мин.
Цены электродвигателей 1000 об/мин
Цена на двигатель 1000 оборотов зависит от мощности, производителя, способа крепления, типа мотора. Диапазон цен 810-205100 грн. Низкие цены на двигатели БУ — отсутствующая гарантия, минимальная работоспособность. Надежные двигатели 1000 оборотов — новые, с заводской гарантией, постгарантийным ремонтом, обслуживанием. Бюджетная альтернатива моторы складского хранения после расконсервации.
Купить двигатель 1000 оборотов

У Слобожанского завода Вы сможете подобрать и купить электродвигатель 1000 об/мин — общепромышленный, крановый, лифтовый, рольганговый, взрывозащищенный:
- 3 цены электродвигателя 1000 об. на любой бюджет
- Широкий выбор по мощности – 0,12-630 кВт
- Габаритные размеры двигателей – 56-355 мм
- Производители – Украина, Россия, Беларусь, Китай
- Только надежные электромоторы, прошедшие ОТК
- Отправка с ближайшего цеха
- Сервисные центры в 75 % крупных городов Украины
- 1 возврат с 2014 года
Купить электродвигатель на 1000 оборотов на 220, 380, 660 Вольт с паспортом, гарантией 12-24 месяца. Подберем двигатель 1000 об под тех процесс, условия эксплуатации, технические характеристики с минимальной ценой. В сервисных цехах завода выполним капитальный ремонт электродвигателя 1000 об/мин, перемотку, восстановление посадочных мест, узлов, замену подшипников.

