
PLС4x КОНТРОЛЛЕР СТАНКА ЧПУ (LPT-порт, 4 оси)
PLС4x КОНТРОЛЛЕР СТАНКА ЧПУ (LPT-порт, 4 оси)
- Мария Селунская 4 лет назад Просмотров:
1 PLС4x КОНТРОЛЛЕР СТАНКА ЧПУ (LPT-порт, 4 оси) 2009 PureLogic RND Russia
2 Содержание: 1. Введение, общие положения. стр Общие положения. стр Технические характеристики, возможности контроллера. чтр Подключение сигналов управления к контроллеру. стр Подключение драйверов ШД к контроллеру. стр Подключение концевых выключателей к контроллеру. стр Таймер коммутации помпы СОЖ. стр Подключение нагрузок реле. стр Конвертор ШИМ>НАПРЯЖЕНИЕ. стр Подключение источика питания к контроллеру. стр PureLogic RND Russia
3 ВСЕ ПОДКЛЮЧЕНИЯ И ИЗМЕНЕНИЯ РЕЖИМОВ РАБОТЫ КОНТРОЛЛЕРА ПРОИЗВОДИТЬ ТОЛЬКО ПРИ ОТКЛЮЧЕННОМ ИСТОЧНИКЕ ПИТАНИЯ ВВЕДЕНИЕ PLC4х это плата расширения (далее контроллер), которая позволяет превратить ПК в полноценную систему управления ЧПУ станком. Плата подключается к LPT-порту ПК. На ПК необходимо установить специальное программное обеспечение (Mach2/3, TurboCNC, LinuxCNC и пр.). Структурная схема управления ЧПУ станком приведена на рис.1. Контроллер PLC4х позволяет управлять 4-мя драйверами шаговых/серво двигателей (серии PLDxxx или любыми другими с интерфейсом STEP/DIR/ENABLE). Контроллер можно использовать для создания различных X-Y-Z координатных систем — фрезерных станков ЧПУ, этикеточном оборудовании, граверов, лазерных резаках, раскладочных станках. Использование микрошага позволяет значительно снизить вибрации ротора ШД и повысить точность позиционирования системы. Контроллер поддерживает управление частотным преобразователем (регулировка оборотов шпинделя, конвертор ШИМ>напряжение) от ШИМ сигнала программы управления (Mach) и имеет встроенный регулируемый таймер (регулируется время и длительность срабатывания реле) для коммутации помпы СОЖ. Все управляющие сигналы, поступающие с LPT порта ПК, проходят через токоусилительный буферный элемент (ток каждого контакта усилен до уровня 30мА). Буферизация всех сигналов порта ЛПТ (входов/выходов) полностью предотвращает выход порта из строя, контроллер можно подключать к любому порту с логической единицей 3.3-5В. Контроллер имеет 5 входов для подключения концевых выключателей (сухой контакт на замыкание/размыкание или концевые датчики типа PLL01) и 3 управляемых реле для подключения внешних высоковольтных сильноточных нагрузок через клеммные разъемы. На контроллере установлены удобные разборные клемные разъемы для подключения концевых выключателей, нагрузок реле, напряжения питания и разъемы типа DB-9 для подключения драйверов. Также в набор входят ответные части для разъемов DB-9 — платы быстрого подключения драйверов. 1
4 ПК с установленной ЧПУ программой MACH 2/3 Блок питания 48В Шаговый двигатель Драйвер ШД 220 LPT — кабель STEP DIR ENABLE подключение до 4-х драйверов ШД Реле 1 Вакуумный прижим Реле 2 Пылесос Реле 3 Помпа СОЖ подключение до 5-ти датчиков В общий управление 220 Концевые датчики Блок питания 12В Частотный преобразователь Бесколлекторный шпиндель Рис.1 Структурная схема управления ЧПУ станко 2
5 ОБЩИЕ ПОЛОЖЕНИЯ Шаговый двигатель это синхронная электрическая машина, т.е. ротор ШД вращается синхронно с электромагнитным полем в статоре. О типах ШД можно прочитать в статье по ссылке ШД имеет фиксированный единичный угол поворота ротора шаг. Обычно для гибридных ШД это 0.9 или 1.8 градуса на шаг. Управлять ШД намного сложнее чем обычным коллекторным двигателем нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления ШД разработаны специальные устройства драйверы ШД. Драйвер ШД позволяет управлять вращением ротора ШД в соответствии с сигналами управления и электронным образом делить физический шаг ШД на более мелкие дискреты. К драйверу ШД подключается источник питания, сам ШД (его обмотки) и сигналы управления. Стандартом по сигналам управления является управление сигналами STEP/DIR/ENABLE. Также многие драйверы ШД имеют дополнительные функции контроль от перегрузок по току, контроль от переполюсовки при подключении ШД и питающих напряжений, контроль рабочей температуры, режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP). Сигнал STEP Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере 1:1, 1:2, 1:4 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса. Сигнал DIR Потенциальный сигнал, сигнал направления. Логическая единица ШД вращается по часовой стрелке, ноль ШД вращается против часовой стрелки, или наоборот. Сигнал ENABLE Потенциальный сигнал, сигнал включения драйвера. Логическая единица драйвер ШД включен, ноль драйвер ШД выключен и обмотки ШД обесточены. 3
6 ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ, ВОЗМОЖНОСТИ КОНТРОЛЛЕРА Метод управления Напряжение питания модуля Ток потребления Деление шага ШД (микрошаг) Максимальная частота сигнала STEP/DIR/EN Параметры установленных реле Параметры таймера управления СОЖ Параметры конвертера ШИМ>напряжение Сопротивление изоляции Рабочая температура Вес модуля без упаковки STEP/DIR/EN от порта LPT 12В максимум 200мА 1:2, 1:8, 1: кгц 220В/10А Частота срабатывания сек. Длительность сек. Uвых= В (при изменении скважности Q=0. 1) Питание 10В от частотного преобразователя 500 мом С 0,5 кг Возможности модуля: Работа с любой LPT ЧПУ программой (STEP/DIR Mach, TurboCNC и пр.). Использование одного питающего напряжения для питания всей схемы, система плавного запуска модуля. Управление одновременно 4-мя драйверами шаговых/серво двигателей Буферизация по току всех управляющих пинов порта LPT. Управление 3-мя сильноточными реле 7А/220В для коммутации дополнительных устройств станка (шпинделя, помпы СОЖ или электровентилятора). Встроенный регулируемый таймер (регулируется время и длительность срабатывания реле) для коммутации помпы СОЖ. Поддержка управления частотным инвертором (регулировка оборотов шпинделя, конвертор ШИМ>напряжение) от ШИМ сигнала программы управления (Mach). Контроль состояния 5-ти внешних датчиков (концевых выключателей). Удобные разборные клемные разъемы для подключения концевых выключателей, нагрузок реле, напряжения питания и разъемы типа DB-9 для подключения драйверов. Также в набор входят ответные части для разъемов DB-9 — платы быстрого подключения драйверов. 4
7 Рис.1 Размеры, подключение, настройки контроллера 5
8 ПОДКЛЮЧЕНИЕ СИГНАЛОВ УПРАВЛЕНИЯ К КОНТРОЛЛЕРУ Контроллер PLC4x управляет 4-мя драйверами ШД используя стандартные сигналы STEP/DIR/ENABLE. Драйвер каждого канала имеет свою пару сигналов STEP1/2/3/4 и DIR1/2/3/4, а сигнал ENABLE общий на все каналы. Сигналы STEP/DIR/ENABLE буферизированы. Сигналы STEP/DIR/ENABLE выведены на разъем XP7 типа DB-25M (LPT порт ПК) согласно рис.1 для удобного подключения к LPT порту ПК или любому другому устройству, генерирующему сигналы STEP/DIR/ENABLE. Расположение контактов с сигналами в разъеме XP7 типа DB-25M (LPT порт ПК) согласно рис.1 представлено на рис.2. DB-25M pinout 1 ENABLE 2 STEP 1 3 STEP 2 4 STEP 3 5 STEP 4 6 DIR 1 7 DIR 2 8 DIR 3 9 DIR 4 10 IN 1 11 IN 2 12 IN 3 13 IN 4 14 SPDL 15 IN 5 16 RELAY 1 17 RELAY GND 25 Параметры сигнала STEP Входное напряжение 3. 5В, минимальная длительность импульса 1мкс. Параметры сигнала DIR Входное напряжение 3. 5В, минимальная длительность импульса 1мкс. Параметры сигнала ENABLE Входное напряжение 3. 5В, минимальная длительность импульса 1мкс. 6
9 ПОДКЛЮЧЕНИЕ ДРАЙВЕРОВ ШД К КОНТРОЛЛЕРУ Драйверы ШД подключаются к контроллеру через разъемы XP8, XP9, XP10, XP11 типа DB-9F согласно рис.1. В каждом разъеме выведены сигналы STEP/DIR/ENABLE для управления драйвером и IN/+5V/GND для подключения концевого выключателя. Расположение контактов с сигналами в разъемах XP8, XP9, XP10, XP11 типа DB-9F согласно рис.1 представлено на рис.3. DB-9F pinout 1 -STEP 2 -DIR 3 -ENB 4 +5V 5 IN 6 +STEP 7 +DIR 8 +ENB 9 GND Рис.3 Сигналы в разъемах DB-9F (XP8, XP9, XP10, XP11) Для быстрого подключения драйверов ШД, в набор входят ответные части для разъемов XP8, XP9, XP10, XP11 — платы быстрого подключения. На платах установлены клемные разъемы, подключение осуществляется согласно рис.4. Рис.4 Подключение драйверов через дополнительные платы 7
10 ПОДКЛЮЧЕНИЕ КОНЦЕВЫХ ВЫКЛЮЧАТЕЛЕЙ К КОНТРОЛЛЕРУ Контроллер PLC4x имеет 5 буферезированных входов для подключения концевых выключателей. Концевые выключатели подключаются к разъемам XP14-XP18 согласно рис.1. К плате можно подключить обычные контактные концевые выключатели и бесконтактные датчики (индуктивные, емкостные) типа PLL01 (индуктивный бесконтактный датчик) с сигнальным выходом. Для этого каждая группа подключения концевых выключателей имеет выход питания +5В, земли и сигнального входа. Входы для концевых выключателей продублированы в разъемах XP8, XP9, XP10, XP11. Срабатывание каждого концевого выключателя индицируется светодиодом + имеется возможность подключения внешнего светодиода через разъем XP5. ТАЙМЕР КОММУТАЦИИ ПОМПЫ СОЖ (реле К1) Контроллер PLC4x имеет встроенный таймер коммутации помпы СОЖ. Таймер управляет включением/выключением реле К1. Срабатывание реле К1 индицируется светодиодом + имеется возможность подключения внешнего светодиода через разъем XP4. Частота включения реле К1 устанавливается подстроечным резистором R1 (частота, сек.), длительность удержания реле во включенном состоянии устанавливается подстроечным резистором R2 (скважность, сек.). На клемный разъем XP1 выведены 3 контакта реле (перекидные). Подключение нагрузок реле осуществляется согласно рис.1,. На рисунке показана коммутация реле в выключенном состоянии. Работа таймера СОЖ управляется джамперами JMP3, JMP2: Если JMP3 замкнут таймер СОЖ работает, если JMP3 разомкнут таймер СОЖ выключен и реле К1 выключено. Если JMP2 замкнут таймер СОЖ включается от сигнала RELAY1 (контакт 16 в разъеме XP7 согласно рис.2.), если JMP2 разомкнут таймер СОЖ включается от сигнала SPDL (контакт 14 в разъеме XP7 согласно рис.2.). ПОДКЛЮЧЕНИЕ НАГРУЗОК РЕЛЕ К2, К3 Контроллер PLC4x поддерживает управление 2-мя сильноточными реле К2 и К3 согласно рис.1. для коммутации дополнительных устройств станка (шпинделя, насоса охлаждающей жидкости или электровентилятора). Срабатывание каждого реле индицируется светодиодом + имеется возможность подключения внешнего светодиода через разъем XP4. На клемные разъемы XP2, XP3 выведены 3 контакта реле (перекидные). Подключение нагрузок реле осуществляется согласно рис.1,. На рисунке показана коммутация реле в выключенном состоянии. Управление каждым реле происходит с соответствующего контакта в разъеме XP7 типа DB-25M — контакты 16(RELAY1, реле K2) и 17(RELAY2, реле K3) согласно рис.2. КОНВЕРТОР ШИМ > НАПРЯЖЕНИЕ Контроллер PLC4x имеет встроенный конвертер ШИМ>напряжение. Конвертер преобразует скважность сигнала управления в напряжение скважность Q=0. 1 > напряжение U=0. 10В. Конвертер используется для управления частотным преобразователем (ЧП), к которому подключен шпиндель (позволяет электронным способом от программы управления ЧПУ изменять обороты шпинделя). Конвертер оптоизолирован от платы контроллера PLC330 и питается от ЧП. Стандартно, ЧП имеет 3 контакта подключения конвертера питание 10В, земля и вход напряжения В, пропорционально которому меняется частота вращения шпинделя. ШИМ сигнал управления ЧП генерируется управляющей ЧПУ программой (Mach) и подается на соответствующий контакт в разъеме XP4 (14 контакт). Подключение осуществляется согласно рис.1 в разъеме XP7 типа DB-25M (LPT порт ПК, контакт 14) согласно рис.2. 8
11 ПОДКЛЮЧЕНИЕ ИСТОЧНИКА ПИТАНИЯ К КОНТРОЛЛЕРУ Контроллер PLC4x необходимо запитывать от отдельного источника 12В (например S-15-12) или от шины 12В блока питания ПК. Запрещается соединение «-» источника питания с заземлением станка. Запрещается соединение «-» источника питания контроллера с «-» других источников установленных в системе ЧПУ. Строго соблюдайте полярность подключения источника питания, в противном случае контроллер может выйти из строя. 9
LPT МОДУЛЬ КОММУТАЦИИ ДРАЙВЕРОВ ШД
 PLC4x LPT МОДУЛЬ КОММУТАЦИИ ДРАЙВЕРОВ ШД (breakout board) (совместимость с LPT ЧПУ программой типа Mach3, трансляция сигналов управления для 4-х осей станка ЧПУ, буферизания всех сигналов управления, 5
PLC4x LPT МОДУЛЬ КОММУТАЦИИ ДРАЙВЕРОВ ШД (breakout board) (совместимость с LPT ЧПУ программой типа Mach3, трансляция сигналов управления для 4-х осей станка ЧПУ, буферизания всех сигналов управления, 5
Автономный контроллер шаговым двигателем схема
Автономный контроллер шагового двигателя
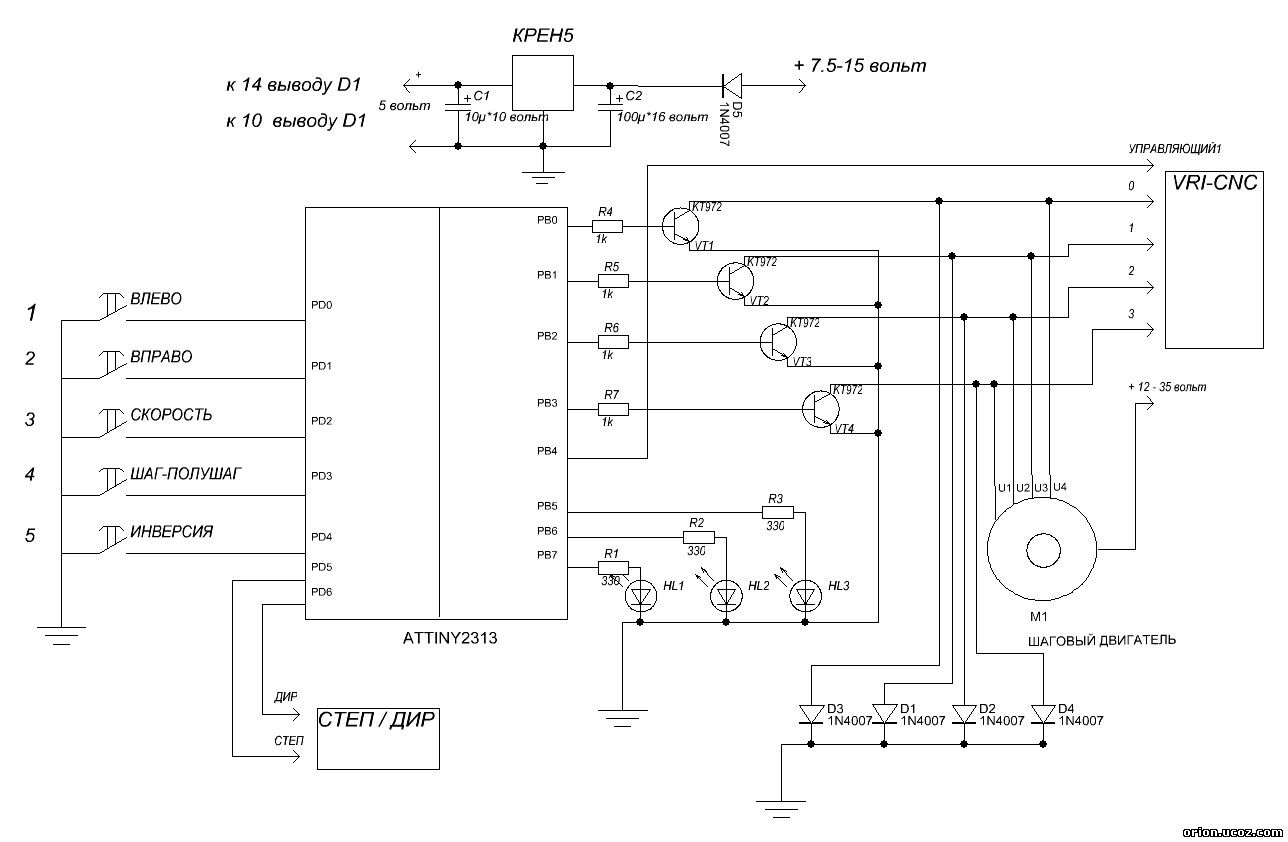
автор: Сергей Шевченко. Предлагаемый вариант автономного контроллера шагового двигателя выполнен на микроконтроллере (МК) ATTINY2313 и транзисторах КТ972 и предназначен для автономной проверки шагового двигателя и контролеров управления шаговыми двигателями.

Возможности автономного контролера (АВК) :
1. управление шаговым двигателем в 2 стороны ( реверсивное вращение).
2. 9 скоростей вращения двигателя.
3. выход для проверки контролера на микросхемах ТМ7, работающий с программой VRI-CNC.
4. выход для проверки контролера с управляющими сигналами СТЕП-ДИР
5. Инверсия сигнала СТЕП
6. Шаговый режим работы для всех выходов.
7. Полушаговый режим для всех кроме режима СТЕП-ДИР.
8. Пошаговый режим работы.
Контролер имеет 5 кнопок управления
1. влево
2. вправо
3. шаг-полушаг
4. скорость
5. инверсия степ
В режиме ШАГ работают режимы СТЕП-ДИР — VRI-CNC – изменение скорости и направления для этих режимов происходит одновременно.
В режиме ПОЛУШАГ работает еще режим VRI-CNC, все изменения работы для этих режимов происходит одновременно.
Для включения этих режимов необходимо подать питание на МК и подождать около 2 секунд пока не загорится светодиод режима шаг, далее выбираем режим ШАГ-ПОЛУШАГ и жмем кнопку нужного направления вращения.
Для включения режима пошаговой работы необходимо подать питание на МК, нажать и удерживать любую кнопку пока не загорятся 3 светодиода – это режим пошаговой работы, далее нажимая любую кнопку, будет происходить режим пошаговой работы, тоб-то вал двигателя будет проворачиваться на 1 шаг. Никакие другие режимы в пошаговом режиме не работают и двигатель вращается только в одну сторону.
Что касается схемы, МК работает на частоте 1 мГц от внутреннего генератора, ну а в остальном все ясно и просто, собираем и наслаждаемся.
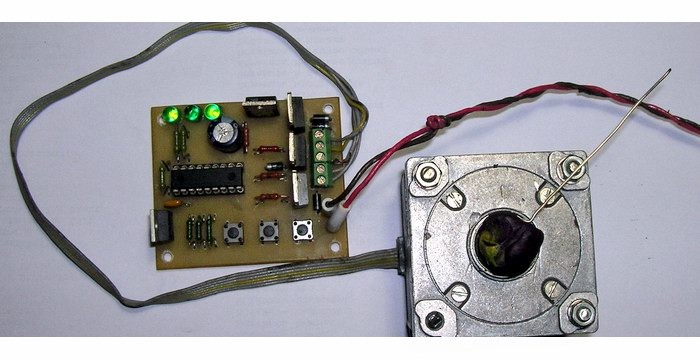
На фотографии первая версия этого контроллера, на схеме и печатная плата уже модифицированная.
Выражаю благодарность Трудоголику в терпении и тестировании прошивок данного устройства.
Исправил управление скоростью двигателем, теперь при изменении скорости двигатель не останавливается,
ступеней регулировки — 9 скоростей, находясь на низких скоростях при удержании кнопки скорости более 3-4 секунд и отпускании включается максимальная скорость.
Добавил режим пошагового тестирования шагового двигателя — необходимо для проверке правильности фазировки движков:
Для вхождения в этот режим после подачи питания на микроконтроллер нажимаем и держим любую кнопку пока
Не загорятся 3 светодиода это индикация входа в пошаговый режим теперь при нажатии любой кнопки будет пошаговое
управление двигателем — поворот вала ровно на 1 шаг при каждом нажатии любой кнопки.
Для входа в основные режимы требуется выключить и включить питание на Микроконтроллер и ждать пока
Не загорится светодиод шагового режима работы контролера — около 2 секунд.
Контроллер шагового двигателя схема
За какое-то время у меня скопилось много шаговых двигателей, но все не было времени ими заняться, а ведь шаговый двигатель вещь довольно интересная и полезная. Но у многих радиолюбителей возникают проблемы с запуском таких двигателей, вот я и решил собрать контроллер для проверки наиболее часто распространённых шаговых двигателей.
Блок управления шаговым двигателем
Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует очень много типов шаговых двигателей, но самыми простыми в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины (см. Рис.1). Их устанавливают в такие аппараты, как принтер, копир, дисковод и т.д.
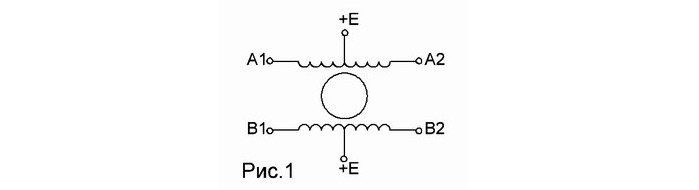
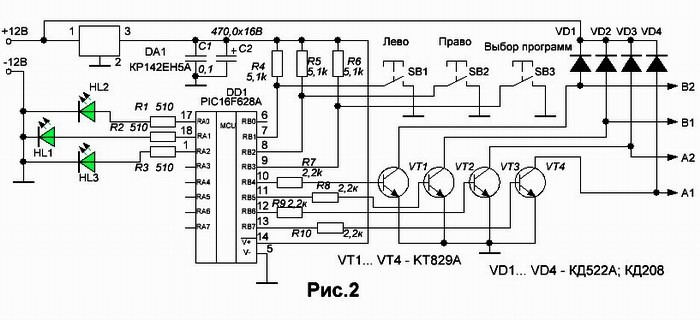
Схема управления шаговым двигателем.
На рисунке 2 представлена схема управления шаговым двигателем.
Сперва хотел разработать схему на жесткой логике, но когда определился с функциями, которые она должна выполнять, пришло твердое решение использовать для этих целей микроконтроллер. И так, что можно определить с помощью данного блока управления.
- Можно определить количество шагов.
- Определить один из двух алгоритмов работы двигателя.
- Опробовать работу двигателя в полушаговом режиме.
- Можно опробовать работу в полношаговом режиме.
Еще раз повторюсь, что разновидностей шаговых двигателей много и данный контроллер подойдет не для всех.
Программы управления шаговыми двигателями
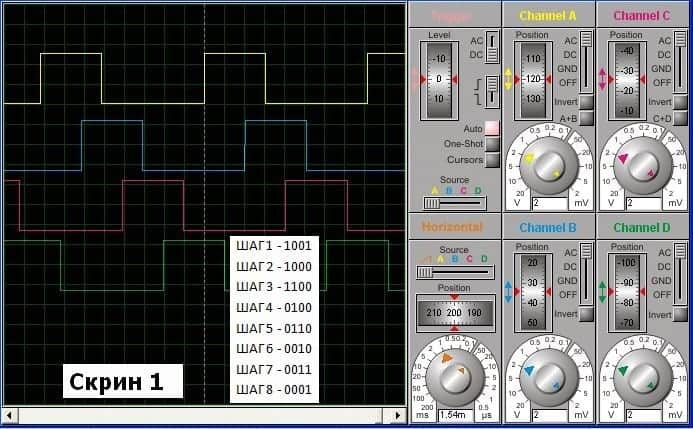
Программа управления состоит из пяти подпрограмм, которые переключаются кнопкой BS3 – «Выбор программ». Номер выбранной подпрограммы отображается тремя светодиодами в двоичной системе счисления. При первом включении должен загореться светодиод HL1, индицирующий о том, что включена первая подпрограмма работы шагового двигателя в полушаговом режиме. Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя.
Возможно, придется экспериментировать. На скриншоте 1 (передняя панель виртуального осциллографа программы Proteus) можно наблюдать импульсную последовательность и коды полушагов работы двигателя. Некоторые из шаговиков по этому алгоритму у меня не работали.
Полношаговый алгоритм работы шагового двигателя
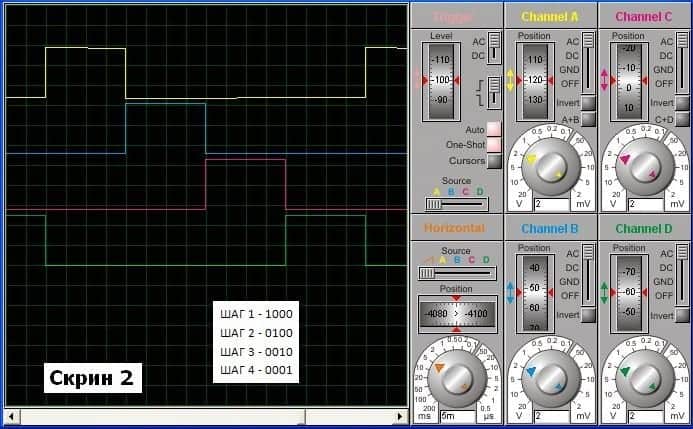
Подпрограмма №2 – светится второй светодиод. В этой подпрограмме двигатель будет работать по полно шаговому алгоритму, показанному на скрине 2.
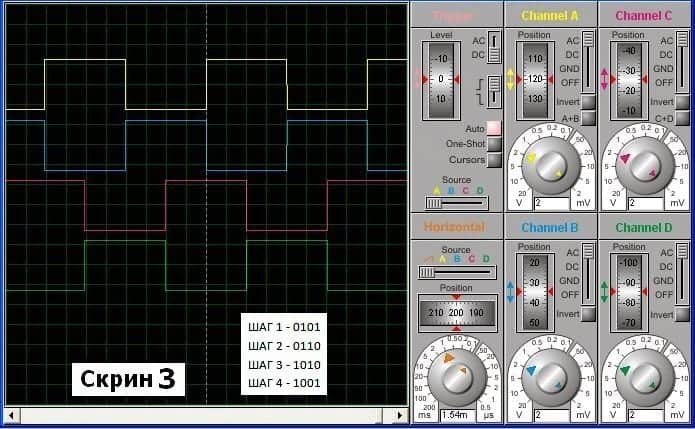
Подпрограмма №3 – светятся первый и второй светодиоды. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3.
Количество шагов шагового двигателя
Подпрограмма №4 – светится третий светодиод. Данная подпрограмма обеспечивает один шаг двигателя при каждом нажатии на кнопку «Право». Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Подпрограмма №5 – светятся первый и третий светодиоды. В этой подпрограмме творится тоже самое, только алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 3.
Общий вид платы — на фото.
Файл прошивки, схему и рисунок печатной платы можно скачать по ссылке ниже.

