Управление бесколлекторным двигателем с датчиками Холла (Sensored brushless motors)
Управление бесколлекторным двигателем с датчиками Холла (Sensored brushless motors)
Мы уже ознакомились с устройством бесколлекторного двигателя и теперь разберемся, как ним управлять.
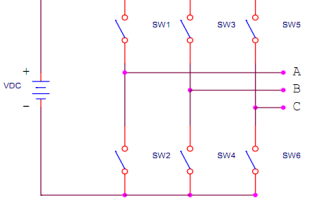
Мостовая схема ключей
Двигатель имеет три вывода (три фазы) на которые нам придется подавать в разные моменты времени «+» или «-» питания. Это реализуется с помощью электронных ключей, включенных по мостовой схеме:

Замыкая ключ SW1 подаем «+» на фазу А, а замыкая SW6 подаем «-» на фазу С. Таким образом, ток потечет от «+» батареи через фазы А и С. Для обеспечения обратного направления, открываем SW5 и SW2. В этом случае ток потечет от «+» батареи через фазы С и А в обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний ключ и один нижний ключ. При смене состояния нужно сразу выключить пару ключей, выждать время, необходимое для закрытия ключей, и только после этого включить другую пару ключей.
Диаграмма включения ключей
Напряжение на обмотки нужно подавать в зависимости от положения двигателя. Рассмотрим управление двигателем, где в качестве датчиков положения используются датчики Холла. Всего используют 3 датчика с дискретными выходами. Ниже приведена схема, согласно которой нужно подавать напряжение на обмотки в зависимости от сигналов с датчиков.


Таблица включения ключей в зависимости от сигналов датчиков Холла:

Анимированная демонстрация работы 4 полюсного двигателя:

ШИМ (PWM), частота, переходные процессы
При включении ключей, как показано выше, на двигатель подается полное напряжение питания. При этом двигатель развивает максимальные обороты (мощность). Чтобы обеспечить управление двигателем нужно регулировать напряжение питания двигателя. Изменение действующего напряжения осуществляется с помощью широтно-импульсной модуляции (ШИМ). Т.е. ключи открыты не все время, а открываются, и закрываются с фиксированной частой, но изменяемой скважностью: 
Таким образом, изменяется действующее напряжение от нулевого до напряжения питания. Чтобы добиться управления оборотами двигателя нужно наложить сигнал ШИМ на сигналы, подаваемые на ключи. Это можно реализовать, например, такой схемой:

Во время включения и выключения ключей происходят переходные процессы, вследствие чего на ключах выделяется дополнительное тепло. Чем выше частота ШИМ сигнала, тем больше количество переходных процессов за единицу времени, и тем выше потери на ключах. Слишком малая частота может быть не эффективной или не обеспечивать необходимой плавности регулирования.
В случае с двигателями без датчиков, которые будут рассматриваться в следующих статьях, выбор частоты ШИМ сигнала играет очень важную роль.
Потери на ключах
Для уменьшения потерь вследствие переходных процессов на ключах ШИМ сигнал можно подавать только на нижние или только на верхние ключи. Прямые потери на ключах (без учета переходных процессов) можно рассчитать по формуле:
P — теряемая мощность, которая выделяется в виде тепла
R — прямое сопротивление открытого ключа
I — ток, протекаемый через ключ.
Очевидно, что чем меньше сопротивление ключей, тем меньше потери на ключах. Уменьшение сопротивления ключей ведет к повышению общего КПД и уменьшению тепловыделения на ключах.
Уровень потерь на ключах имеет квадратичную зависимость от тока. Уменьшить ток, сохранив при этом общую мощность, можно повысив напряжение питания двигателя. В качестве примера рассмотрим два варианта:
1. Питание: 50В, ток: 100А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 100 2 = 10 Вт
2. Питание: 100В, ток: 50А, сопротивление ключей: 0,001 Ом. Потери на ключах = 0,001 * 50 2 = 2,5 Вт
Т.е. снизив ток вдвое потери на ключах падают в 4 раза.
Угол опережения фаз (timing)
При приложении напряжения к обмотке двигателя, ток в обмотке не может вырасти мгновенно, поскольку обмотка двигателя представляет собой индуктивность. От момента подачи напряжения до достижения тока максимального значения пройдет некоторое время. Аналогично при снятии напряжения понадобится некоторое время пока ток будет уменьшаться до нуля. Это время зависит от индуктивности обмотки двигателя и других конструктивных особенностей двигателя. Таким образом, действие обмотки двигателя несколько запаздывает за управляющим сигналом.
Чтобы компенсировать эту задержку управляющий сигнал на ключи подают с опережением. Опережение управляющего сигнала выражают в угле опережения. Угол опережения может быть от 0 до 30 градусов. Речь идет об электрических градусах (см. Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя). Угол опережения может отличаться для каждой модели двигателя. Точность установки угла опережения сильно влияет на работу высоко-оборотистых двигателей. На малых скоростях точность установки угла опережения не столь критична.
Настройка угла опережения (timing) выполняется либо перемещением датчиков (некоторые двигатели оборудованы специальным приспособлением) либо корректируется программно средствами регулятора. Если двигатель имеет реверсивный режим (должен обеспечивать вращение в обе стороны), разумнее прибегнуть к программному методу.
Для лучшего понимания смысла угла опережения можно провести аналогию с двигателем внутреннего сгорания, где после подачи искры проходит некоторое время до воспламенения топлива. За это время вал двигателя успевает провернуться на некоторый угол. Для компенсации такой задержки устанавливают угол опережения зажигания.
EC-вентиляторы — инновации для энергосбережения
EC-мотор = электродвигатель с электронной коммутацией
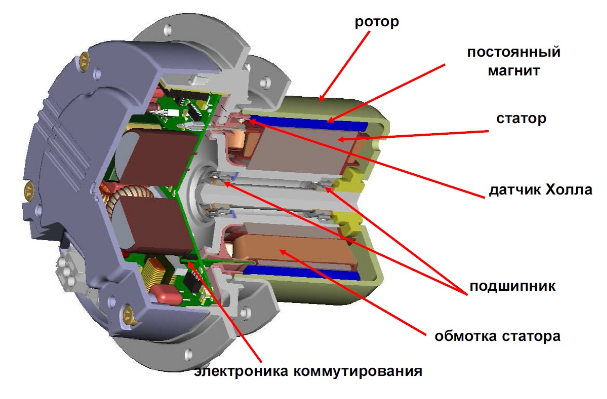
ЕС-мотор – это бесколлекторный двигатель постоянного тока со встроенными в ротор постоянными магнитами и электронной коммутацией. Электронно-коммутируемый мотор (Electronically Commutated) представляет собой бесщеточный двигатель, принцип работы которого аналогичен организации работы двигателя постоянного тока.

Принцип работы ЕС-двигателя
Плавность и точность регулирования скорости EC-двигателя (EC-motor) обеспечивается встроенной коммутационной электроникой — контроллером. Магнитное поле, создаваемое встроенными в ротор постоянными магнитами, реагирует на изменение вектора магнитного поля через изменение направления тока в обмотке статора.
С целью наиболее точного регулирования скорости вращения ротора контроллер постоянно вычисляет и подает на обмотку статора ток нужной полярности. Двигатель очень чутко реагирует на изменение управляющих сигналов (токовых 4–20 мА или потенциальных 0–10В) и обеспечивает вращения ротора с заданной скоростью и с наименьшими энергозатратами.
Подключение осуществляется непосредственно к источнику постоянного напряжения, или через модуль коммутации — к источнику переменного тока (220В, 380В). Через шины или приборный интерфейс возможно управление группами вентиляторов через ПК или КПК.
Вентиляторы, созданные на базе EC-двигателей, принято называть EC-вентиляторами. Точно реагируя на управляющие сигналы, ЕС-вентилятор плавно изменяет скорость вращения и обеспечивает подачу необходимого в данный момент количества воздуха.
Электронно-коммутируемые ЕС-двигатели на сегодня — наиболее перспективное и энергосберегающее решение для применения в различных системах отопления, вентиляции и кондиционирования.
ЕС-двигатели характеризуются высокой производительностью и оптимальным управлением во всем диапазоне скоростей вращения.
EC-вентиляторы — это интеллектуальная техника! Она отличается оптимальным управлением двигателями, высокой производительностью благодаря встроенной управляющей электронике.

Что может ЕС-вентилятор?
ЕС-вентиляторы отличаются экономным использованием энергии и превосходными возможностями управления.
Приводимые в действие энергосберегающими моторами, ЕС-вентиляторы имеют электронное управление (блок коммутации), которое всегда настраивается на оптимальный режим. Благодаря этому принципу, такие моторы работают синхронно, не имеют проскальзывания и, следовательно, не имеют из-за него потерь. Это означает, что эффективность энергопотребления у EC-двигателей выше, чем у AC-вентиляторов.
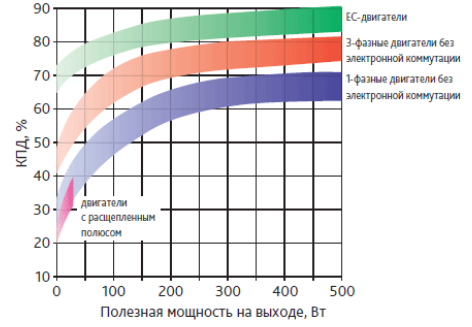
Благодаря встроенной управляющей электронике, ЕС-моторы могут плавно регулировать число оборотов и гибко адаптироваться под изменение необходимого количества воздуха, сохраняя при этом высокий КПД. Поэтому, при одинаковой производительности по количеству воздуха, они потребляют значительно меньше энергии, чем AC-приводы переменного тока.
Еще одной особенностью ЕС-моторов является энергосберегающий потенциал не только при работе с полной нагрузкой, но, прежде всего, в режиме частичной нагрузки. В диапазоне частичной нагрузки они теряют гораздо меньше эффективности (КПД), чем асинхронные двигатели аналогичной мощности.
Еще одним экологическим аспектом, связанным с воздухообрабатывающими системами и кондиционерами, является уровень шума. Здесь ЕС-моторы также демонстрируют преимущество, поскольку они создают меньше шума в процессе работы.


Преимущества EC-вентиляторов
Высокий потенциал для энергосбережения
- экономное энергопотребление, гибкое регулирование, улучшенные характеристики аэродинамики рабочего колеса вентилятора с прямым приводом
Встроенная электронная система управления мотором
- наличие возможностей для настройки скорости, управления, контроля, сети
- отсутствие пиковых пусковых токовых нагрузок, в отличие от AC-двигателей
- более высокий КПД (до 90%), меньшие теплопотери.
- компактный мотор/отсутствие внешних устройств, например, преобразователей частоты и трансформаторов
- меньший расход кабеля/требуется меньше места в распределительном шкафу.
- интегрированные ЭМС и сетевой фильтр
- адаптация производительности вентилятора в зависимости от условий его применения благодаря встроенным функциям управления и регулировки вентиляторов (постоянное давление или постоянный объем)
Не требуют ТО и долговечны
- использование встроенных стандартных элементов (силовых модулей)
- повышенная надежность благодаря меньшему количеству компонентов
Низкий уровень шума и вибрации
- более компактная конструкция двигателя и крыльчатки вентилятора, меньше занимаемого пространства, лучше направленный поток воздуха, лучше теплосъем, меньше потерь давления и меньше уровень шума
- шум от мотора в режиме частичной нагрузки практически отсутствует
Универсальность использования ЕС-двигателей
- возможна эксплуатация в сетях 50 и 60 Гц по всему миру
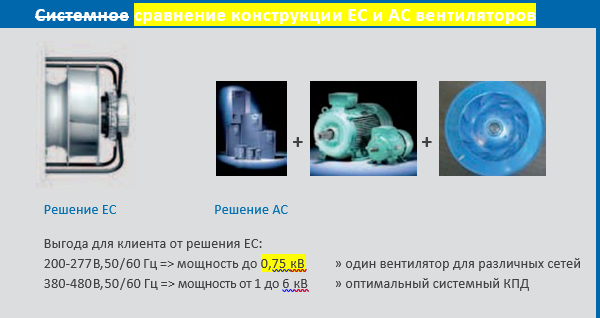
- более широкий диапазон напряжения (1
200 … 277 В AC или 3
380 …480 В AC)
Энергоэффективность
- процент фактически используемой энергии во много раз выше, чем у двигателей переменного тока.
Компактный дизайн
- управляющая электроника уже встроена и поэтому незаметна.
Пример: габариты ПВУ с EC-вентилятором намного компактнее и требуют для размещения гораздо меньше монтажного пространства.
Обзор бесколлекторных двигателей: все, что нужно знать
Возникновение бесколлекторных двигателей объясняется необходимостью создания электрической машины с множеством преимуществ. Бесколлекторный двигатель представляет собой устройство без коллектора, функцию которого берет на себя электроника.
БКЭПТ — бесколлекторные электродвигатели постоянного тока, могут быть мощностью, примером, 12, 30 вольт.
Выбор подходящего двигателя
Чтобы подобрать агрегат, необходимо сравнить принцип работы и особенности коллекторных и бесколлекторных двигателей.

Слева направо: коллекторный двигатель и двигатель ФК 28-12 бесколлекторный
Коллекторные стоят меньше, но развивают невысокую скорость вращения крутящего момента. Они работают от постоянного тока, имеет небольшой вес и размер, доступный ремонт по замене деталей. Проявление негативного качества выявляется при получении огромного количества оборотов. Щетки контактируют с коллектором, вызывая трение, что может повредить механизм. Работоспособность агрегата снижается.
Щеточки не только требуют ремонта из-за быстрого износа, но и могут привести к перегреву механизма.
Главным преимуществом бесколлекторного двигателя постоянного тока является неимение контактов крутящего момента и переключения. Значит отсутствие источников потерь, как в двигателях с постоянными магнитами. Их функции выполняют транзисторы МОП. Ранее их стоимость была высокой, поэтому они не были доступны. Сегодня цена стала приемлемой, а показатели значительно улучшились. При отсутствии в системе радиатора, мощность ограничивается от 2,5 до 4 ватт, а ток работы от 10 до 30 Ампер. КПД бесколлекторных электродвигателей очень высокий.
Вторым преимуществом выступает настройки механики. Ось устанавливается на широкоподшипники. В структуре нет ломающих и стирающихся элементов.
Единственным минусом является дорогой электронный блок управления.

Шпиндель ЧПУ Porter Cable 690
Рассмотрим, пример механики ЧПУ станка со шпинделем.
Замена коллекторного двигателя на бесколлекторный оградит от поломки шпинделя для ЧПУ. Под шпинделем имеется в видувал, обладающий правыми и левыми оборотами крутящего момента. Шпиндель для ЧПУ обладает большой мощностью. Скорость крутящего момента контролируется регулятором сервотестором, а обороты управляются автоматом контроллером. Стоимость ЧПУ со шпинделем около 4 тысяч рублей.
Принцип работы
Главная особенность механизма — отсутствие коллектора. А постоянные магниты установлены у шпинделя, является ротором. Вокруг него располагаются проволочные обмотки, которые имеют различные магнитные поля. Отличием бесколлекторных моторов 12 вольт является сенсор управления ротором, расположенный на нем же. Сигналы подаются в блок регулятора скорости.
Устройство БКЭПТ
Схему расположения магнитов внутри статора обычно применяют для двухфазных двигателей с небольшим количеством полюсов. Принцип крутящего момента вокруг статора применяют при необходимости получить двухфазный двигатель с небольшими оборотами.
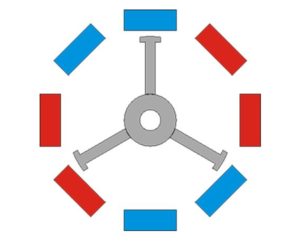 На роторе расположены четыре полюса. Магниты в форме прямоугольника устанавливаются, чередуя полюсы. Однако не всегда количество полюсов равняется числу магнитов, которых может быть 12, 14. Но количество полюсов должно быть четным.Несколько магнитов могут составлять один полюс.
На роторе расположены четыре полюса. Магниты в форме прямоугольника устанавливаются, чередуя полюсы. Однако не всегда количество полюсов равняется числу магнитов, которых может быть 12, 14. Но количество полюсов должно быть четным.Несколько магнитов могут составлять один полюс.
На картинке изображено 8 магнитов, формирующих 4 полюса. Момент силы зависит от мощности магнитов.
Датчики и их отсутствие
Регуляторы хода подразделяются на две группы: с датчиком положения ротора и без.
Токовые силы подаются на обмотки двигателя при особом положении ротора.Его определяет электронная система с помощью датчика положения. Они бывают разнообразных типов. Популярный регулятор хода — дискретный датчик с эффектом Холла. В двигателе на три фазы на 30 вольт будет использовано 3 датчика. Блок электроники постоянно располагает данными о положении ротора и направляет напряжение вовремя в нужные обмотки.
Датчик Холла
 Распространенное приспособление, изменяющие свои выводы при переключении обмоток.
Распространенное приспособление, изменяющие свои выводы при переключении обмоток.
Устройство с разомкнутым контуром измеряет ток, частоту вращения. ШИМ каналы присоединяются к нижней части системы управления.
Три ввода присоединяются к датчику Холла. В случае изменения датчика Холла, начинается процесс переработки прерывания. Для обеспечения быстрого реагирования обработки прерывания подключается датчик Холла к младшим выводам порта.
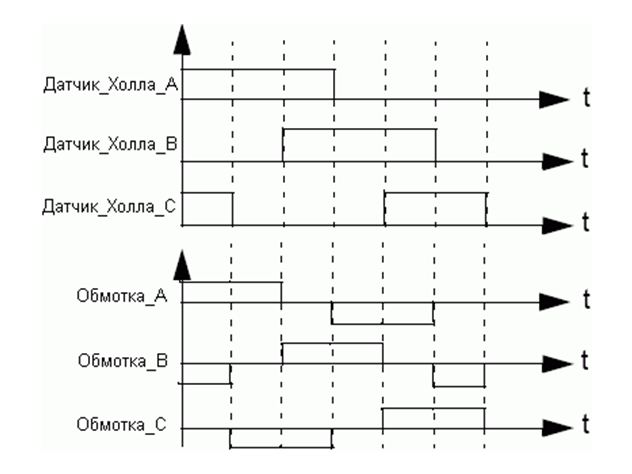
Сигналы датчика холла в момент вращения
Использование датчика положения с микроконтроллером

Микроконтроллеры AVR фирмы Atmel
Контроллер силы каскада лежит в основе AVR ядра, который обеспечивает грамотное управление бесколлекторным двигателем постоянного тока. AVR представляет собой чип для выполнения определенных задач.
Принцип работы регулятора хода может быть с датчиком и без. Программа платы AVR осуществляет:
- пуск двигателя максимально быстро без использования внешних дополнительных приборов,
- управление скоростью одним внешним потенциометром.

Электронный блок управления СМА LG 6871ER1007C
Отдельный вид автоматического управления сма, используется в стиральных машинах.
Отсутствие датчика
 Для определения положения ротора необходимо проводить измерение напряжения на незадействованную обмотку. Данный способ применим при вращении двигателя, иначе он не будет действовать.
Для определения положения ротора необходимо проводить измерение напряжения на незадействованную обмотку. Данный способ применим при вращении двигателя, иначе он не будет действовать.
Бездатчиковые регуляторы хода изготавливаются легче, это объясняет их широкое распространение.
Контроллеры обладают следующими свойствами:
- значение максимального постоянного тока,
- значение максимального рабочего напряжения,
- число максимальных оборотов,
- сопротивление силовых ключей,
- импульсная частота.
При подключении контроллера важно делать провода, как можно короче. Из-за возникновения бросков тока на старте. Если провод длинный, то могут возникнуть погрешности определения положения ротора. Поэтому контроллеры продаются с проводом 12 — 16 см.
Контроллеры обладают множеством программных настроек:
- контроль выключения двигателя,
- плавное или жёсткое выключение,
- торможение и плавное выключение,
- опережение мощности и КПД,
- мягкий, жесткий, быстрый старт,
- ограничения тока,
- режим газа,
- смена направления.

Контроллер LB11880, изображенный на рисунке, содержит драйвер бесколлекторного двигателя мощной нагрузки, то есть можно запустить двигатель напрямую к микросхеме без дополнительных драйверов.
Понятие ШИМ частоты
Когда происходит включение ключей, полная нагрузка подаётся на двигатель. Агрегат достигает максимальных оборотов. Для того чтобы управлять двигателем, нужно обеспечить регулятор питания. Именно это осуществляет широтно-импульсная модуляция (ШИМ).
Устанавливается необходимая частота открытия и закрытия ключей. Напряжение меняется с нулевого на рабочее. Чтобы управлять оборотами, необходимо наложить сигнал ШИМ на сигналы ключей.
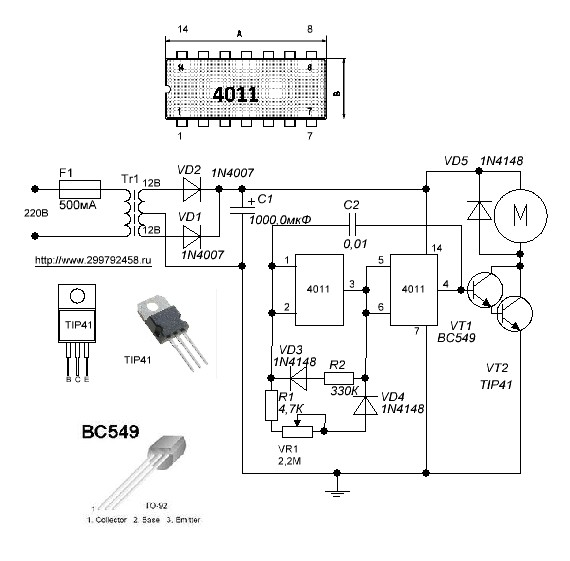
Схема регулятора оборотов двигателя постоянного тока на напряжение 12 вольт
Сигнал ШИМ может быть сформирован аппаратом на несколько выводов. Или создать ШИМ для отдельного ключа программой. Схема становится проще. ШИМ сигнал имеет 4— 80 килогерц.
Увеличение частоты приводит к большему количеству процессов перехода, что даёт выделение тепла. Высота частоты ШИМ повышает количество переходных процессов, от этого происходят потери на ключах. Маленькая частота не даёт нужную плавность управления.
Чтобы уменьшить потери на ключах при переходных процессах, ШИМ сигналы подаются на верхние или на нижние ключи по отдельности. Прямые потери рассчитываются по формуле P=R*I2, где P — мощность потерь, R — сопротивление ключа, I — сила тока.
Меньшее сопротивление минимизируют потери, увеличивает КПД.
Система arduino
Часто для управления бесколлекторными двигателями используется аппаратная вычислительная платформа arduino. В основе находится плата и среда разработки на языке Wiring.
В Плату arduino входит микроконтроллер Atmel AVR и элементная обвязка программирования и взаимодействия со схемами. На плате имеется стабилизатор напряжения. Плата Serial Arduino представляет собой несложную инвертирующую схему для конвертирования сигналов с одного уровня на другой. Программы устанавливаются через USB. В некоторых моделях, например, Arduino Mini, необходима дополнительная плата для программирования.
Язык программирования Arduino используется стандартный Processing. Некоторые модели arduino позволяют управлять несколькими серверами одновременно. Программы обрабатывает процессор, а компилирует AVR.
Проблемы с контроллером могут возникать из-за провалов напряжения и чрезмерной нагрузке.
Крепеж двигателя

Моторама— механизм крепления двигателя. Применяется в установках двигателей. Моторама представляет собой взаимосвязанные стержни и элементы каркаса. Моторамы бывают плоскими, пространственными по элементам. Моторама одиночного двигателя 30 вольт или нескольких устройств. Силовая схема моторамы состоит из совокупности стержней. Моторама устанавливается в сочетании ферменных и каркасных элементов.
Бесколлекторный электродвигатель постоянного тока незаменимый агрегат, применяемый как в быту, так и в промышленности. Например, ЧПУ станок, медицинское оборудование, автомобильные механизмы.
БКЭПТ выделяются надежностью, высокоточным принципом работы, автоматическим интеллектуальным управлением и регулированием.
Arduino.ru
Запуск и управление оборотами бесколлекторного двигателя
Здравствуйте,
Вопрос в целом стоит так — имеется такой двигатель (или очень похожий)
Бесколлекторный инраннер B28-47-16S Brushless Inrunner Motor 2400 kv
Технические характеристики:
KV: 2400 rpm/v
Максимальный ток: 28A
Максимальная мощность: 470W
Ток простоя: 1.0A
Сопротивление: 0.038Ω
Рекомендуемый ESC : 35A
Количество элементов: 3-4SLipo
И стоит задача его включения. В кинематической схеме старт под нагрузкой и невозможностью вращения в обратную сторону (стоит храповик). Мощность потребуется в пределах 70-80%, обороты в пределах 50-100%, то есть до 40 000 в минуту
Почитал я литературу, и сделал предварительные выводы-
1.Самый простой способ. взять на том же хобикинге Рекомендуемый ESC : 35A. Чтобы заставить его работать, ему нужно подать серво-сигнал, который представляет собой ШИМ, параметры пока не определил (частоту, напряжение).
2. Построить . Силовая часть из 6 ключей и управление ардуиной.
http://www.avislab.com/blog/brushless05/ и снизу целый список. Хорошо всё рассказано, но не до конца.
Разбирался уже кто-нибудь с такими вопросами? Кто-то может что подсказать?
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии

Тут по генератору с регулируемой частотой и скважностью. Автор dimax ежедневно тут, думаю подскажет если что непонятно будет.
А так, думаю действительно проще наверное взять готовый, модельный драйвер.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
esc 35a стоит дороже двигателя. простой силовой мост с управлением от ардуинки дожен быть ощутимо дешевле. К тому же готовый весьма большой по размеру и избыточный по функционалу. Место где хочу использовать критично к габаритам. То есть всё лишнее надо выкинуть.
изменение оборотов не нужно плавное. достаточно будет 2-х или 3-х ступеней, с переключением кнопкой. Скажем 50-75-95% скорости. Нагрузка пульсирующая, но со временем не меняющаяся (сжатие пружины через редуктор с последующим отпусканием пружины — и следующий цикл)
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии

. серво-сигнал, который представляет собой ШИМ, параметры пока не определил (частоту, напряжение).
Вам дело советуют, а вам не нравится.
Что вам не ясно в библиотеке СЕРВО ?
примерно 20 миллисикунд период, 1000 — минимальная скорость, 2000 максимальная (1500- середина)
5 Вольт
Ню-ню, определяйтесь со своими частотами- напряжениями. Флаг в руки.
Учтите только что трёхфазнику под нагрузкой с места стартануть .
Ток сами посчитаете ?
11.1 (14.8) поделите на 0.038Ω
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
римерно 20 миллисикунд период, 1000 — минимальная скорость, 2000 максимальная (1500- середина)
? esc управляется 50 гц шимом? что такое 1000 и 2000?
Учтите только что трёхфазнику под нагрузкой с места стартануть .
Ток сами посчитаете ?
11.1 (14.8) поделите на 0.038Ω
скажите, какая разница? если двигатель будет запускать китайский esc, там они использут не закон ОМА, а закон ома, и поэтому ток там будет гораздо меньше?
есть ещё одна трудность. насколько я разобрался в алгоритмах, esc для моделей запускают двиг следующим образом — для того чтоб определить начальное положение ротора, подаётся небольшой ток на обмотки и ротор устанавливается в определённую точку, после этого уже подаются рабочие импульсы и движок погнал крутиться. Так вот при установке начального положения ротор должен иметь возможность вращаться в обоих направлениях. Для моделей это роли не играет, треть-12 оборота вала, даже если назад. А вот в моей системе этот подход неприменим, назад ничего не вращается. Поэтому нужен пуск строго в одну сторону, т.е. предустановку можно сделать на снятом двигателе, но потом ? И возможно нужен будет двиг с датчиками холла и соответствующим esc