
KRESS BRUSHLESS MOTOR: чем отличаются бесщеточные двигатели от щеточных в профессиональном инструменте
KRESS BRUSHLESS MOTOR: чем отличаются бесщеточные двигатели от щеточных в профессиональном инструменте?
Профессиональные инструменты Kress производят в соответствии с современными тенденциями, поэтому на нашем сайте тоже можно найти специальную характеристику двигателя – щёточный коллекторный или бесщеточный бесколлекторный. У них почти одинаковый набор деталей, но если углубиться, то разница окажется очевидной. Так в чём отличие щеточного двигателя от бесщеточного в профессиональном инструмента Kress и влияет ли оно на инструменты? Давайте разберемся.

Принцип работы устройств KRESS с щеточным двигателем
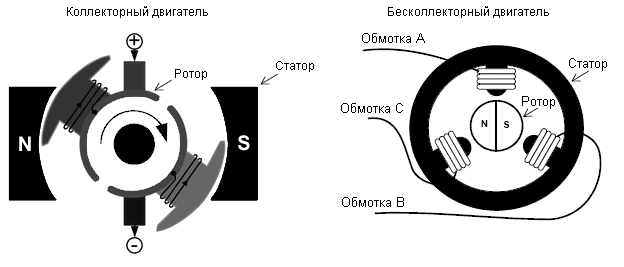
Основой механизма служит якорь, и представляет он из себя металлический вал. Как движущийся элемент вал обеспечивает наличие крутящего момента. В щеточном коллекторном двигателе на якорь прикреплен ротор – вращающийся барабан, которой потребляет основной ток и вырабатывает электродвижущую силу. В действие ротор (и якорь) приводит обмотка – медная проволока, накрученная с разных сторон ротора. Ток проходит по проволоке и создаёт магнитное поле, за счет которого происходит вращение элемента.
С противоположных концов якоря расположены подшипники. Они обеспечивают сбалансированное вращение. Между ними с одной из сторон обмотки находится коллектор – соединенные между собой медные контакты, которые окружают графитные щетки. Из-за щеток коллекторному инструменту часто приписывают два минуса – износ при трении и искрение при запуске все из-за того же трения. Но в профессиональном инструменте Kress, в отличие от бытовых аналогов, щетки они износостойкие, а возможность искрения сходит на нет благодаря плавным пусковым механизмам. Задача щеток заключается в передаче напряжения через коллектор в обмотки. Все детали закреплены в сердечник статора – статичный элемент всего механизма. Все вышеописанные детали щеточного коллекторного двигателя находятся внутри состоящего из металлических пластин статора.
За счет отсутствия дорогих материалов и простой конструкции щеточного двигателя такие инструменты Kress стоят дешевле бесщеточных, а их техническое обслуживание не требует больших затрат. К тому же при должном уходе и соблюдении условий эксплуатации каждый инструмент прослужит долгое время.
Принцип работы устройств с бесщеточным двигателем KRESS BRUSHLESS MOTOR
Ротор бесщеточного бесколлекторного двигателя оснащен постоянным магнитом. По-прежнему статичный статор же здесь расположен внутри ротора. Медные обмотки теперь находятся на статоре. При подаче постоянного тока на обмотку она запитывается и становится электромагнитом. Работа бесщеточного бесколлекторного двигателя KRESS BRUSHLESS MOTOR основана на взаимодействие магнитных полей постоянным магнитом (на роторе) и электромагнитом (обмотки на статоре). Когда катушки находятся под напряжением противоположные полюса ротора и статора к друг-другу, заставляя первый вращаться. Как и на какую катушку подавать напряжение определяет электронный контроллер. Он оснащен датчиком Холла, который измеряет величину магнитного поля. Нужен он для того, чтобы увеличить итоговую выходную мощность.


Таким образом отсутствие щеток в двигателе KRESS BRUSHLESS MOTOR снимает вопрос о возможности искрения или загрязнения мотора. .
Профессиональные инструменты Kress с щеточными коллекторными двигателями отлично справляются со своими задачами и подойдут любителям проверенных временем технологий.
Инструменты, оснащённые технологией KRESS BRUSHLESS MOTOR, помогут выйти на новый уровень комфорта при работе и приятно удивят пользователей своей мощностью.
Электродвигатель для радиоуправляемой модели: какие бывают и что лучше купить – коллекторный или бесколлекторный
Вариантов выбора немного, но задуматься есть над чем
Если вы уже решили, какую именно радиоуправляемую модель хотите купить и точно знаете, что ваш будущий внедорожник, самолет, дрон или быстроходный катер будет оснащен электродвигателем, самое время задуматься, какого типа мотор лучше и надежнее.
Современная RC-модель на электрической тяге может иметь коллекторный или бесколлекторный двигатель. Каждый вариант имеет свои достоинства и недостатки. И разница тут не только в цене, как могут сказать в ближайшем магазине.
Итак, рассмотрим все детально, а выводы относительно того, с каким же моторчиком выбрать машинку (или другую модель) на радиоуправлении, пусть каждый делает самостоятельно.

Коллекторный электродвигатель: плюсы и минусы конструкции
«Brushed», «щеточный», «коллекторный» – все это названия первого типа электромоторов, которые пользуются популярностью как среди начинающих пилотов, так и среди профессиональных спортсменов, к примеру, участвующих в гонках или соревнованиях DRIFT.
Важная особенность конструкции – это наличие щеточно-коллекторного узла, являющегося его «сердцем» и непосредственно приводящим RC-технику в движение.
Внешнее отличие коллекторного от бесколлекторного электромотора – наличие всего двух проводов («плюс» и «минус») у коллекторных двигателей и трех проводов («фаз») у бесколлекторных двигателей для дальнейшего подключения мотора к регулятору оборотов (регулятору скорости, аббревиатура «ESC» англ.).
Ротор (подвижная часть) и статор (неподвижная часть) – это два основных элемента мотора коллекторного типа.
Внутри корпуса (статора) вращается подвижный ротор с медной обмоткой. С одной стороны вала ротора установлена передающая шестерня, или шкив, а с другой – коллектор, который, по сути, является набором контактов.
На статоре установлены графитовые щетки – тоже, своего рода, скользящие контакты, которые контактируют с коллектором. Щетки предназначены для передачи электроэнергии на обмотку вращающегося ротора.
С коллекторных двигателей все начиналось, это – «заря» RC-техники, поэтому они более дешевые и просты в обслуживании, но существенно уступают по мощности и времени эксплуатации новому поколению электромоторов.
Коллекторные двигатели
Преимущества
Низкий КПД (около 60%)
Сравнительно низкая скорость движения RC-модели
Простота эксплуатации и технического обслуживания
Быстрый износ составляющих конструкции, очень ограниченный ресурс эксплуатации
Исключительно подходит под определенные виды спортивных соревнований
Достоинства, приведенные в таблице, делают модели, оснащенные коллекторными двигателями, желанными для начинающих пилотов и пилотов-профессионалов для использования на специальных соревнованиях.

Если покупаете радиоуправляемую модель с коллекторным двигателем, учтите, что графитовые щетки и коллектор – это система подвижных контактов, в которой механическая составляющая мотора имеет свои особенности. Возможны искрения и перегрев, а потому – желательно избегать контакта с агрессивной внешней средой (влага, грязь, пыль).
Перед началом эксплуатации модели с коллекторным двигателем, ее желательно проверить, «обкатать» на низких скоростях, чтобы щетки «притерлись» к коллектору.

Бесколлекторный электродвигатель: в чем преимущества
«Brushless», «бесщёточный», «бесколлекторный» – это электромотор для радиоуправляемой модели (автомобиля, катера, самолета, вертолета или квадрокоптера), который был разработан уже в 21 веке. Он воплотил в себя все вожделенные качества любого профессионального RC-моделиста: надежность, мощность, долговечность.
Основная проблема, которой «грешит» любой электромотор – это перегрев. Когда ротор вращается внутри статора в коллекторном двигателе, высокая температура внутри механизма (а, следовательно, и быстрый износ, и частые поломки) – неизбежна.
Гениальное инженерное решение перевернуло мир радиоуправляемых моделей и не только: «А что, если вращать не ротор, а статор? Тогда охлаждение мотора будет происходить автоматически, за счет потоков воздуха создаваемого самим двигателем!»
Бесколлекторный двигатель стал широко использоваться в авиации и автомобиле- и судостроении, а радиоуправляемые модели с такой «начинкой» стали ездить и летать значительно быстрее и намного дольше.
Двигатель бесколлекторного типа приводится в движение за счет переменного тока. В этом случае нужен специальный регулятор скорости (или регулятор оборотов или контроллер), который преобразует постоянный ток аккумулятора в переменный с тремя фазами. Техническая сложность конструкции определяет главный (и, наверное, единственный) недостаток двигателей этого типа – они значительно дороже коллекторных.
Бесколлекторные двигатели
Преимущества
Высокий КПД двигателя (до 92%)
Более высокая мощность в сравнении с аналогичными по размеру коллекторными двигателями
Больший вес, по сравнению с аналогичным коллекторным двигателем
Высокая износостойкость за счет бесконтактной конструкции, соответственно значительно больший ресурс эксплуатации
Крайне нежелательно давать такие модели детям
Высокая степень влагозащиты, защиты от пыли и вязкой грязи
Невероятно высокая скорость движения модели, например, наземные модели могут развивать скорость до 260 км/ч, а воздушные до 350 км/ч.
Бесколлекторные электродвигатели надежные и долговечные, они практически не изнашиваются. Что может выйти из строя – это подшипники, которые легко заменить.

Одна особенность, которую может не заметить в бесколлекторном двигателе новичок, но чему обрадуется профи – это наличие сенсоров. Сенсорные электромоторы практичнее, поскольку установленные датчики (сенсоры) гарантирует очень плавную работу и быстрый старт, а также более рациональный расход энергии.
Есть сенсор или нет, начинающий моделист может не заметить, а вот, по стоимости ощутит сразу – наличие сенсоров делает ценник мотора более «тяжелым».
Как отличить внешне? У моторов с сенсорами кроме трех соединительных проводов есть шлейф из тонких проводков, которые подключаются к регулятору скорости.
Радиоуправляемая модель с бесколлекторным мотором – это выбор профессионалов, особую ценность для которых приобретает скорость и выносливость аппарата на соревнованиях.
Также следует отметить, что в большинстве случаев, для питания регуляторов с бесколлекторными двигателями применяются специальные аккумуляторные батареи литий-полимерного типа, которые могут вырабатывать огромные токи разряда (и это будет отдельная тема для следующей статьи).
Перед покупкой, взвесьте все «за» и «против», обратитесь за консультацией к специалистам и выбирайте модель «под себя» и свои возможности. Главное, что ассортимент рынка RC-моделей обширен и позволяет сделать оптимальный выбор.
Главное меню
 |  | |
 |  | |
|  |
Кузовные работы
| | |
|  | |
| |
Я ХОЧУ эту «модель» .
| | |
|  | |
| |
Обои рабочего стола
| | |
|  | |
| |
Всероссийские соревнования на призы УрФО 2008
Реклама на сайте
Реклама на сайте
Реклама на сайте
Реклама на сайте
Реклама на сайте
Обслуживание бесколлекторных моторов
Обслуживание бесколлекторных моторов
Автор статьи: Shane Archer.
Автор перевода: Владислав Ярополов.
Несмотря на то, что бесколлекторные моторы расхваливаются, как не требующие обслуживания, мы часто упускаем из виду тот факт, что это говорится в основном по сравнению с их коллекторными собратьями, а не утверждение само по себе. Так же как и любая деталь вашей автомодели, бесколлекторный мотор требует нежной заботы для продолжения работы с максимальной эффективностью. Конечно, у него нет коллектора для проточки или щеток для замены, но он может накапливать грязь так же, как и любой другой мотор, его подшипники могут изнашиваться, а мокрые или поврежденные провода могут приводить к проблемам эксплуатации или даже к повреждению мотора. Возможность установить бесколлекторный мотор и забыть про него, является большим удобством, но если вы посвятите немного вашего времени для обслуживания вашего бесколлекторного мотора, вы будете вознаграждены мотором, который будет отлично работать на протяжении очень долгого времени.
- Шестигранные отвертки
- Жидкое масло для подшипников
- Очиститель для электромоторов в аэрозольной упаковке
- Кисть
- Тряпка
- Приспособление для извлечения подшипников (необязательно)
Начните с очистки
Когда после заездов вы устраиваетесь для обслуживания вашей автомодели, есть несколько простых задач, которые вы должны всегда выполнить со своим бесколлекторным мотором. Во-первых, в первую очередь вы должны убедиться, что мотор чистый, так как грязь может повредить бесколлекторный мотор так же, как коллекторный мотор. Используйте кисть или тряпку для очистки поверхности мотора, осмотрите мотор на предмет очевидных повреждений.
Проверьте его состояние
Так как бесколлекторные моторы не имеют значительного сопротивления при прокручивании, обычно очень легко обнаружить, если что-нибудь вызывает заедание в моторе. Вытащив мотор из автомодели и очистив его, поверните якорь для проверки на любые помехи во вращении якоря. Если вы чувствуете, что вращение не такое свободное, как это должно быть, вам необходимо разобрать и очистить мотор.
Проверьте состояние проводки
Ваш бесколлекторный мотор имеет несколько проводов, выходящих из него, и каждый из них очень важен. Надеемся, что ваша проводка достаточно хорошо защищена от движущихся частей и других внешних воздействий, но даже если это так, неприятности могут случаться и провода могут быть порваны или протерты. Удостоверьтесь, что жилы в проводах не вылезли наружу, и что нет опасности контакта между проводами. Если изоляция на проводах порвана или жилы вылезли наружу, используйте изоляционную ленту для изоляции проводов.
Смазка
Главная точка контакта между мотором и внешней средой — это частично открытые подшипники, и вам нужно, чтобы они вращались настолько свободно, насколько это возможно. После очистки мотора, удостоверьтесь, что вы капнули в подшипники несколько капель масла для подшипников. Смазка поможет им свободно вращаться и отбрасывать наружу мусор.
Время от времени, или если вы заметите проблему, вам необходимо разбирать ваш бесколлекторный мотор для осмотра и очистки. Не беспокойтесь, этот процесс очень прост, намного проще, чем разборка коллекторного мотора.
1. Демонтаж
Снимите мотор с автомодели, и отпаяйте провода или отсоедините проводку, если это возможно. Когда вы сделали это, очистите область вокруг посадочного места мотора и везде, где еще может собраться мусор.
| | |
|  | |
|  |
2. Разборка
Большинство бесколлекторных моторов разбираются легко и быстро с помощью шестигранных отверток, с передней или задней стороны корпуса, или с обоих сторон. Разберите ваш мотор на части и положите их перед собой.
| | |
|  | |
| |
3. Очистка
Как и в любом коллекторном моторе, грунт и грязь могут откладываться на внутренней поверхности корпуса мотора, поэтому очистите вращающиеся части и сам корпус мотора. Облейте аэрозольным очистителем для электромоторов корпус мотора и дайте ему высохнуть перед сборкой. Также протрите якорь мотора.
| | |
|  | |
| |
4. Смазка
Так как вы только что очистили корпус мотора и вместе с ним подшипники, вам необходимо повторно смазать их. Капните несколько капель жидкого масла для подшипников в каждый подшипник. Если после очистки и смазки подшипников, они по-прежнему кажутся засоренными или застревают, вам необходимо заменить их на новые, прежде чем использовать мотор.
| | |
|  | |
| |
5. Замена подшипников
Если вам необходимо заменить подшипники, проконсультируйтесь с руководством по эксплуатации или с производителем мотора, чтобы не ошибиться с размером подшипников. Попытайтесь найти подшипники с металлической защитой, так как они более эффективно защищают от повреждения и попадания грязи, чем подшипники с резиновой или тефлоновой защитой. Если у вас есть таковое, используйте приспособление для извлечения подшипников для того, чтобы вытащить подшипники из корпуса мотора, а затем вставьте новые подшипники обратно на место. Капните внутрь новых подшипников пару капель масла для подшипников.
| | |
|  | |
| |
6. Сборка и установка
Вы все сделали! Соберите ваш мотор и затем установите его в вашу автомодель.
| | |
|  | |
| |
Теперь, все выглядит совсем неплохо, не так ли? По сравнению с коллекторными моторами, обслуживание бесколлекторных моторов настолько легко, насколько это только возможно. Потратив несколько минут, вы получаете моторную установку, которая продолжает быть эффективной и безотказной, и обещает работать еще долгое время. Не существует такого понятия, как не требующий обслуживания мотор, но бесколлекторные двигатели крайне близки к этому.
Бесколлекторный электродвигатель
Принцип работы трёхфазного вентильного двигателя
Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что контроллер такого двигателя обычно питается от постоянного напряжения.

Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесколлекторных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессор обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор бесколлекторного электродвигателя
Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов — см. пример конструкции.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безынерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке. Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающееся магнитное поле.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера. Наличия микроконтроллера требует большое количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Градусы при расчете — электрические. Они меньше геометрических градусов в число пар полюсов ротора. Например, в ВД с ротором имеющим 3 пары полюсов оптимальный угол между векторами будет 90°/ 3 = 30°
Коммутация производится так, что поток возбуждения ротора — Ф 0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Контроллер ВД регулирует момент, действующий на ротор, меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
— Высокое быстродействие и динамика, точность позиционирования
— Широкий диапазон изменения частоты вращения
— Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
— Возможность использования во взрывоопасной и агрессивной среде
— Большая перегрузочная способность по моменту
— Высокие энергетические показатели ( КПД более 90 % и cosφ б олее 0,95 )
— Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
— Низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками
— Относительно сложная система управления двигателем
— Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
Из-за неразвитости электроники по-прежнему во многих случаях рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
Пример: 8-разрядные RISC-микроконтроллеры AVR в устройствах управления 3-фазными бесколлекторными электродвигателями постоянного тока
Трехфазные бесколлекторные электродвигатели постоянного тока обеспечивают превосходные характеристики, как при управлении с датчиками положения, так и без них.
Управление с датчиками используется, если момент сопротивления неизвестен или варьируется, а также, если необходимо достичь большого пускового момента.
Управление без датчиков, как правило, используется в вентиляторах, где позволяет избавиться от применения датчиков Холла и исключить проводные связи с ними.
Типичные сферы применения:
— Холодильное/морозильное оборудование (компрессоры)
— Системы нагрева, вентиляции и кондиционирования воздуха (например, вентиляторы)
Управление трехфазным бесколлекторным электродвигателем постоянного тока с датчиками положения на основе датчиков Холла
выходы датчиков Холла подключены к линиям ввода-вывода микроконтроллера, которые настроены на генерацию прерываний при изменении состояния
регулировка скорости выполняется с помощью ШИМ-каналов, подключенных к нижним драйверам.

Контроль тока выполняется с помощью АЦП и аналогового компаратора
Поддерживаемые интерфейсы связи: TWI, SPI и УАПП
Управление трехфазным бесколлекторным электродвигателем постоянного тока без датчиков

Управление трехфазным бесколлекторным электродвигателем постоянного тока без датчиков по положению:
— положение ротора определяется с помощью дифференциального АЦП;
— регулировка скорости выполняется с помощью ШИМ-каналов, подключенных к нижним драйверам.
Токовая перегрузка определяется с помощью АЦП или аналогового компаратора.
Поддерживаемые коммуникационные интерфейсы: TWI, SPI и УАПП.
Рекомендуемые микроконтроллеры: ATmega64, AT90PWM3.

