Что такое импульс шагового двигателя
Что такое импульс шагового двигателя
Блок кварцевого генератора кварцевых наручных часов с шаговым двигателем
Электронный блок кварцевого генератора (БКГ) часов 1356,1656,1656А с бестриммерной цифровой подстройкой периода следования выходных импульсов предназначен для формирования импульсов, управляющих работой шагового двигателя (ШД) часов.
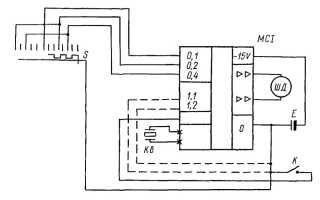
Конструктивно БКГ представляет собой бескорпусную интегральную микросхему (MCI), кварцевый резонатор (Кв), многопозиционный переключатель (S) и штифт обнуления, размещенные на диэлектрической подложке (рис. 9).
БКГ имеет два основных режима работы: рабочий режим и режим обнуления, а также вспомогательный (технологический) режим ускоренных испытаний.
В рабочем режиме период следования выходных разнополярных импульсов управления шаговым двигателем равен 1с, ток потребления при этом не более 0,3 мкА для КНЧ 1356,1656А и 0,5 мкА для КНЧ 1656.
В рабочем режиме БКГ обеспечивает изменение периода следования выходных однополярных импульсов путем измерения коэффициента деления частоты переключателем.
При установке вала переводного в положение „перевод стрелок» штифт обнуления соединяется с положительным полюсом источника пи-
тания. При этом подача выходных импульсов прекращается, а ток потребления не превышает 0,5 мкА.
После отключения штифта обнуления от положительного полюса источника питания, путем возвращения вала переводного в исходное положение, БКГ обеспечивает следование первого выходного импульса, а, следовательно, и первый скачок секундной стрелки с задержкой в I с.
В режиме ускоренной работы ШД частота следования разнополярных импульсов управления равна 32 Гц, длительность импульсов каждой полярности соответствует длительности в рабочем режиме: первый импульс ускоренной работы имеет полярность, противоположную полярности им-рульса, предшествующего обнулению.
Для обеспечения заданной точности хода часов БКГ содержит схему цифрового регулирования частоты. При этом частота кварцевого генератора остается неизменной, а корректировка частоты выходящих импульсов производится масштабным преобразователем частоты, включенным на входе. При повороте переключателя на одно деление обеспечивается дискретное изменение частоты выходных импульсов, соответствующее изменению среднего суточного хода на 0,5 с/сут. Цифровая подстройка частоты обеспечивает гораздо более широкие пределы регулировки точности хода часов.
Блок кварцевого генератора КНЧ 1656Н конструктивно представляет собой печатную плату с расположенными на ней бескорпусной интегральной микросхемой (МС), кварцевым резонатором (Кв) и триммером (С) (рис. 10), которые соединены между собой печатными проводниками.
При изменении емкости триммера С в определенных пределах изменяется частота опорного генератора, и, соответственно, период следования выходных импульсов управления ШД; таким образом, триммер является элементом подстройки часов на точность хода.
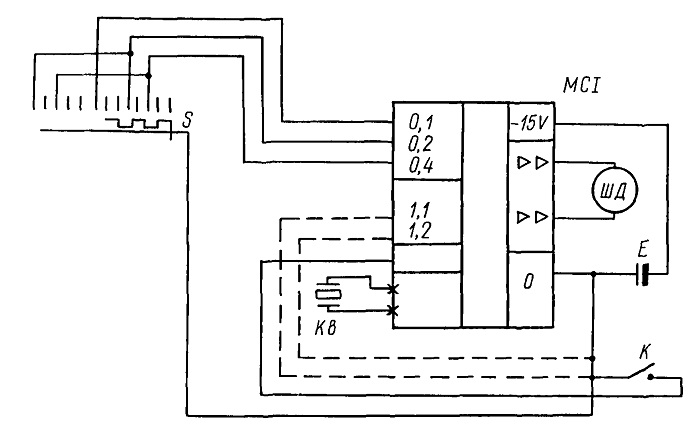
Рис. 9. Схема электрическая принципиальная часов с механизмом 1356, 1656,1656А:
MCI — микросхема интегральная бескорпусная; ШД — шаговый двигатель; Кв — кварцевый резонатор РК-206; S — переключатель; К — контакт обнуления делителей частоты; В — источник питания

Рис. 10. Схема электрическая принципиальная часов с механизмом 1656Н: МС — микросхема интегральная бескорпусная; С — триммер; Кв — кварцевый резонатор; -Е — минусовый полюс источника питания; +Е — плюсовой полюс источника питания; ЩД — шаговый двигатель; I — обнуление
Считайте импульсы ШИМ, подаваемые в драйвер полевого двигателя шагового двигателя
fscheidl
Я пытаюсь (точно) подсчитать количество импульсов, подаваемых на драйвер шагового двигателя TI DRV8711 . Этот драйвер «преобразует» один передний фронт, в зависимости от настроек, в полный шаг или микрошаг. MCU, который я использую для генерации этих импульсов ШИМ, — это Freescale MPC5602D . Частота импульсов будет менее 30 кГц на шаговый двигатель.
Я использую это устройство для контроля положения с помощью шагового двигателя. Это требует точного знания предпринятых шагов (учитывая, что шаговый двигатель не глохнет).
Как обычно управляются драйверы такого типа? Используя обычный вывод GPIO, который устанавливается в процедуре прерывания по таймеру или через ШИМ? Я хочу не допускать переполнения основного цикла утверждением и отменой вывода GPIO. (Я должен управлять 5+ шаговыми двигателями одновременно)
Подсчет импульсов ШИМ, отправляемых на драйвер, тривиален с помощью обычного вывода GPIO.
С другой стороны, как можно подойти к проблеме точного подсчета количества импульсов ШИМ? Делается ли это путем подачи выхода ШИМ обратно в MCU и использования счетчика для подсчета нарастающих фронтов? Я предполагаю, что мне нужно уменьшить частоту ШИМ до того, как я достигну желаемого количества импульсов, чтобы отключить ШИМ перед последним импульсом и, таким образом, гарантировать, что он не «перескочит» заданное значение.
Евгений Ш.
fscheidl
Евгений Ш.
fscheidl
Евгений Ш.
отметка
Я знаю три способа достижения того, что вам нужно (и я использовал все три). Вы упомянули первые два в своем комментарии.
С подсчетом ISR шаг-импульс является самым простым. ISR нужно только увеличивать или уменьшать счетчик позиции. В 8-битных микросхемах, которые я использую, такой ISR занимал бы меньше микросекунды (хотя я кодирую на ассемблере, а не на C на этом MCU). Это не должно быть много накладных расходов на любом MCU.
Второй способ — ввести импульсный счетчик в счетчик. Это может быть сложно, если ваш двигатель работает в обоих направлениях, так как вам нужно иногда увеличивать и уменьшать другие (или просто знать, в каком направлении находится счет). Я использовал этот метод еще в 80-х годах, когда фишки счетчика / таймера обычно использовались для управления движением.
Наиболее эффективным способом управления шаговым двигателем является отдельная схема генератора скорости, управляемая микроконтроллером. Простой способ сделать это — использовать чип множителя 7497 . Каждый 7497 имеет шесть битов, и вы каскадируете их, чтобы получить желаемое разрешение. Однако их выходной импульсный поток не очень равномерный, что может вызвать нестабильность в некоторых приложениях (однако, его можно фильтровать). Лучшим методом является метод сумматора / накопителя, который дает очень чистый выходной импульсный поток и легко мультиплексируется для управления несколькими двигателями (если вам это нужно). У меня было несколько 32-осевых систем, которые использовали этот подход. Сумматор / аккумулятор (и мультиплексор) очень хорошо вписываются в ПЛИС.
Большим преимуществом генератора тарифов является простота программного обеспечения. Генератор частоты выдает прерывание с фиксированной скоростью, то есть периодом обновления. В этом ISR вы просто загружаете количество шагов, которые вы хотите выполнить в следующем периоде. Прерывания обновления могут быть относительно нечастыми, поэтому накладные расходы низкие. Положение легко поддерживать — вы просто добавляете значение, которое вы загружаете в генератор тарифов, к своему счетчику положения. Скорость легко контролируется, потому что она прямо пропорциональна количеству шагов, которые вы загружаете в генератор скорости. Ускорение также легко контролировать — просто добавляйте / вычитайте фиксированное значение при каждом обновлении. Если у вас есть несколько двигателей, вы должны обновить их в одном и том же ISR.
(Вот так) Я извиняюсь, если это было слишком затянуто.
fscheidl
Виктор Ламойн
отметка
Виктор Ламойн
отметка
Возможно, самый простой метод генерации импульсов ШИМ — это использование ПЛК Omron CP1L-M30DT1-D (это примерный номер детали, так как есть несколько дополнительных моделей с высокоскоростным импульсным выходом). С помощью этого устройства вы можете генерировать не только импульсы ШИМ, но и любое количество предварительно определенных стандартных импульсов с рабочим циклом 50% для приведения шагового двигателя в предварительно определенное положение. Ускорение и замедление также программируются, устраняя ошибки драйвера шагового двигателя. Высокоскоростные счетчики также доступны, если вы хотите отправить импульсы для проверки, но, как правило, в этом нет необходимости, поскольку устройство точно выведет заранее запрограммированное количество импульсов. Я новичок в этой группе и не думаю, что смогу создать ссылку на спецификацию ПЛК, так что, возможно, кто-то другой сможет создать ее для меня.
Характеристики входа высокоскоростного счетчика и импульсного выхода приведены на стр. 3 данной документации.
Русские Блоги
Шаговый двигатель Verliog с последовательным управлением
Шаговый двигатель Verliog с последовательным управлением
Использование шаговых двигателей по-прежнему очень широко. В настоящее время принтеры, плоттеры, роботы и другое оборудование используют шаговые двигатели в качестве основной энергии. В течение одного семестра изучения FPGA попробуйте использовать FPGA для управления состоянием шагового двигателя с помощью конечного автомата.Он может осуществлять прямое и обратное вращение с помощью команд, вперед и назад с помощью кнопок, останавливать вращение в любом положении с помощью команд и кнопок; Шаговый двигатель ускоряется и замедляется с помощью команд.
1. Оборудование
1. Шаговый двигатель 28BYJ-48
Шаговый двигатель — это электромеханический компонент, который может преобразовывать электрические импульсные сигналы в угловое или линейное смещение. Фактически это однофазный или многофазный синхронный двигатель. Каждый раз, когда импульс поступает в распределитель импульсов, состояние включения каждой фазы двигателя изменяется, и ротор будет вращаться на определенный угол (называемый углом шага). В нормальных условиях общий угол поворота шагового двигателя пропорционален количеству входных импульсов; когда импульсы определенной частоты поступают непрерывно, скорость двигателя строго соответствует частоте входного импульса и не подвержена колебаниям напряжения и изменениям нагрузки. влияет. Поскольку шаговые двигатели могут напрямую получать цифровые входы, они особенно подходят для управления микрокомпьютерами. 
2、ULN2003
Шаговый двигатель внешне подключается через fpgaIO, и требуется схема привода. На тот момент это был ULN2003, поэтому я разобрал один. Я помню, что внутренне он состоит из трубок Дарлингтона, поэтому я не буду вдаваться в подробности. 
принцип
Шаговый двигатель — это управляющий двигатель с разомкнутым контуром, преобразующий электрические импульсные сигналы в угловое или линейное смещение. Он является основным исполнительным элементом в современных цифровых системах программного управления и широко используется. В случае отсутствия перегрузки скорость двигателя и положение остановки зависят только от частоты и количества импульсов импульсного сигнала и не зависят от изменения нагрузки. Когда шаговый драйвер получает импульсный сигнал, он приводит в действие шаговый двигатель. Заданное направление вращается на фиксированный угол, называемый «ступенчатым углом», и его вращение выполняется шаг за шагом под фиксированным углом. Угловое смещение можно контролировать, контролируя количество импульсов, чтобы достичь цели точного позиционирования; в то же время скорость и ускорение вращения двигателя можно контролировать, управляя частотой импульсов, чтобы достичь цели регулирования скорости.
1. Принцип движения
При непрерывной подаче управляющих импульсов на двигатель, двигатель будет продолжать вращаться. Каждый импульсный сигнал соответствует изменению состояния включения фазной или двухфазной обмотки шагового двигателя один раз, и соответствующий ротор будет вращаться на определенный угол (угол шага). Когда изменение включенного состояния завершает цикл, ротор вращается на шаг зубьев.
Четырехфазный шаговый двигатель может работать в разных режимах включения, общие режимы включения:
Четыре удара (однофазная обмотка запитана): A-B-C-D-A .
Двойные четыре удара (двухфазная обмотка находится под напряжением): AB-BC-CD-DA-AB -.
Восемь долей: A-AB-B-BC-C-CD-D-DA-A .
2. Реализация управления шаговым двигателем.
Шаговый двигатель, использованный в эксперименте, представляет собой четырехфазный шаговый двигатель. Количество зубьев ротора — 64. В системе используются четыре входа / выхода для параллельного управления.ПЛИС напрямую отправляет многофазные импульсные сигналы, которые поступают на каждую фазную обмотку шагового двигателя после усиления мощности. Это устраняет необходимость в распределителях импульсов. Функцию распределителя импульсов можно реализовать чисто программным методом. 
В эксперименте четыре старших бита EXI / O используются для управления четырьмя фазами четырехфазного шагового двигателя. В соответствии с четырехфазным методом управления с одним и двумя восьмикратными ударами последовательность управления при вращении двигателя следующая: A → AB → B → BC → C → CD → D → DA.

Частота шагового двигателя не может быть слишком высокой или слишком низкой. Этот лучше всего около 800 Гц. Частота слишком высока для вращения.
Шаговый двигатель имеет технический параметр: пусковую частоту без нагрузки, то есть частоту импульсов, при которой шаговый двигатель может нормально запускаться в условиях холостого хода. Если частота импульсов выше этого значения, двигатель не может запуститься нормально и может потерять шаг или остановиться. Под нагрузкой частота запуска должна быть ниже. Если двигатель должен вращаться с высокой скоростью, частота импульсов должна иметь процесс ускорения, то есть начальная частота должна быть низкой, а затем увеличиваться до желаемой высокой частоты в соответствии с определенным ускорением (скорость двигателя увеличивается с низкой до высокой).
программирование
Вся программа включает в себя модуль конечного автомата шагового двигателя, модуль конечного автомата последовательной связи, модуль устранения дребезга клавиш и функциональный модуль клавиш.

(1) Последовательная связь
Данные, отправляемые помощником последовательного порта в FPGA, используются в качестве условия управления состоянием шагового двигателя. В конечном автомате шагового двигателя соответствующее действие напрямую реализуется через условие оценки, и действие Переключиться между.
(2) Кнопка «Отключить»
Чтобы избежать механического дрожания, необходимо выполнить обнаружение кнопки. Есть много способов использовать это. Здесь используется кнопка сканирования 20 мс, а D-триггер ищет спадающий фронт.
(3) Отладка конечного автомата связи через последовательный порт.
Я не буду вдаваться в подробности, как конкретно моделировать.
Функция реализации проста, поэтому метод записи сверху вниз не применяется, и все решаются в одном файле.
Пишите csdn впервые, если возникнут проблемы, поправьте меня.
Если у вас есть вопросы, вы можете отправить личное сообщение.
Драйвер шагового двигателя TB6560
Драйвер шагового двигателя TB6560 выполнен в виде платы, его размеры — 75х50х35мм. Основной интерфейс управления — STEP/DIR, состоящий из трех сигналов:
STEP. Это тактирующий сигнал, который показывает необходимость поворота ротера двигателя на один шаг. Именно от частоты этого сигнала зависит скорость механизма.
DIR. Устанавливает направление, в котором будет вращаться двигатель.
ENABLE. Своевременно прекращает подачу напряжения, регулирует остановку двигателя.
Возможности модуля
Драйвер шагового двигателя TB6560 необходим для управления двухфазными биполярными шаговыми двигателями. Он обеспечен защитой от перегрева, что предотвращает возникновение неприятных ситуаций в работе. Управлять двигателем можно в четырех режимах:
микрошаговый 1/16;
микрошаговый 1/8;
полушаговый;
шаговый.
Вибрации и шум значительно снижены при работе в микрошаговом режиме. Стабилизирует напряжение двигателя на установленном уровне.
Схема драйвера
Каждый цифровой вход имеет заземление через подтягивающие резистры, сопротивление которые составляет 100кОм. Защитный диод не позволяет напряжению превышать уровень Vdd (+5В) на входе. Активное состояние идрайвера — замкнутый ключ.
Скорость спада тока
Драйвер предполагает 4 режима спада тока обмоток двигателя:
При первом выход находится исключительно в режиме медленного спада тока.
Второй подразумевает переход выхода в режим быстрого спада тока на последнем интервале.
В третьем спад тока обмоток двигателя происходит на двух последних интервалах.
В последнем выход предусмотрен на всех четырех интервалах.
Предпочтительно использовать режимы форсированного спада тока в микрошаговых режимах при высокой скорости двигателей.Индуктивность обмоток также крайне важна.
Контроллер шагового двигателя.
Микросхема контроллера: Toshiba TB6560
— ток удержания 25%,50%,100% в процентах от тока номинального драйвера
— ток рабочий 25%, 50%, 75%, 100% в процентах от тока номинального драйвера
— Режимы шагов двигателя (микрошаг) 1, 1/2, 1/8, 1/16
Максимальный ток: 3А (3,5 А в пике)
Рабочее напряжение: 10-35 Вольт
Полная гальваническая развязка
Рабочий режим настраивается с помощью переключателей
TB6560 V2 — драйвер управления двухфазными шаговыми двигателями выполнен на специализированном чипе Toshiba TB6560AHQ с питанием 10В – 35В постоянного напряжения, предназначен для использования с двигателями типа NEMA17 – NEMA23 с максимальным током фазы до 3 А.
Широко используется в ЧПУ системах.
Особенности:.
— Напряжение питания 10 В – 35 В постоянного напряжения;
— Оптоизолированные входы сигналов управления;
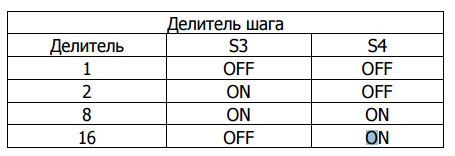
— Делитель шага (микрошаг) – 1,2,8,16;
— Установка максимального тока – 14 ступеней.
Основные характеристики:
Входное напряжение 10-35 В постоянного напряжения
Выходной ток 0.3 A..3 A (в пике 3.5 А макс.)
Температура эксплуатации — от -10 до 45
Влажность Не допускать конденсат и капли воды
Дополнительные условия Не допускать проводящих газов и защищать от пыли
Размеры 75 х 50 х 35 мм
1. Разьемы
Маркировка Описание
CLK+, CLK- Положительный и отрицательный выводы входа тактового сигнала
CW+, CW- Положительный и отрицательный выводы входа управления
направлением вращения
EN+, EN- Положительный и отрицательный выводы входа разрешения работы
+24D, GND Положительный и отрицательный выводы подключения питания
A+, A- Выводы подключения I фазной обмотки двигателя
B+, B- Выводы подключения II фазной обмотки двигателя
2. Схемы подключения
Управляющие входы можно подключить к портам контроллера двумя способами. Зависит от конфигурации и исполнения портов контроллера (Рис.1, Рис.2).
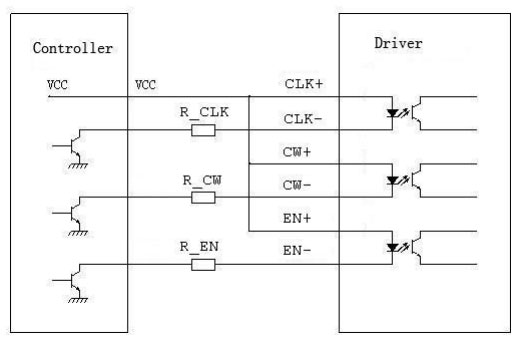
Рис.1. Пример подключения драйвера при исполнении порта контроллера на NPN ключах с открытым коллектором.
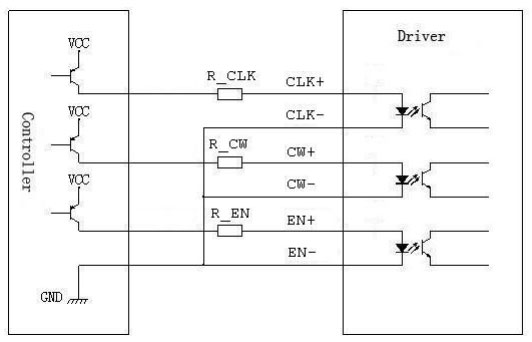
Рис.2. Пример подключения драйвера при исполнении порта контроллера на PNP ключах с открытым коллектором.
Примечание:
Значение сопротивлений R_CLK, R_CW и R_EN зависят от питающего напряжения VCC:
— При VCC=5 В, R_CLK = R_CW = R_EN = 0;
— При VCC=12 В, R_CW = R_EN = 1кОм, R_CLK = 1.5 кОм;
— При VCC=24 В, R_CW = R_EN = 2кОм, R_CLK = 3 кОм.
3. Настройка DIP переключателей
3.1. Делитель шага (микрошаг) устанавливают переключателями S3, S4 в соответствии с таблицей:
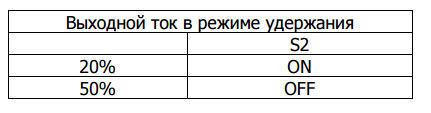
3.2. Установка тока в режиме покоя определяется переключателем S2. Таблица соответствия:
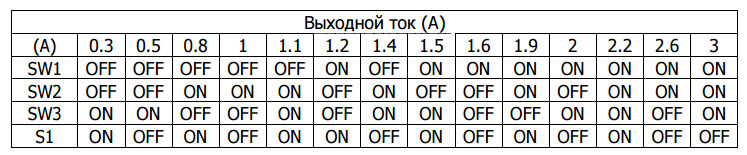
3.3. Установка выходного тока Переключатели SW1-SW3, S1 устанавливают выходной ток в режиме вращения. Таблица соответствия:
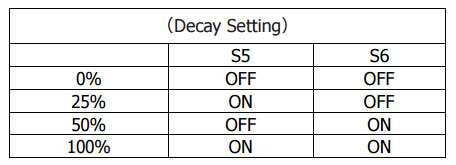
3.4. Затухание дискретных импульсов (Decay)
В драйвере есть возможность подстраивать форму дискретных импульсов для формирования сглаженного сигнала, приближенного к синусоиде. Необходимость возникает из-за разности параметров двигателей и их режимов. Параметр указывает наклон горизонтальной части импульса после переднего фронта (затухание). Для прямоугольного импульса (меандр) — Decay = 0%, для треугольного — Decay = 100%. Функция может быть полезна для выбора оптимального режима работы шагового привода и часто помогает сгладить работу двигателя, уменьшить шум и вибрации. Таблица соответствия:
4. Силовые цепи
Допускается последовательное и параллельное включение шаговых двигателей. При параллельном включении выходной ток необходимо устанавливать выше. При последовательном включении ток устанавливается как для одного двигателя.
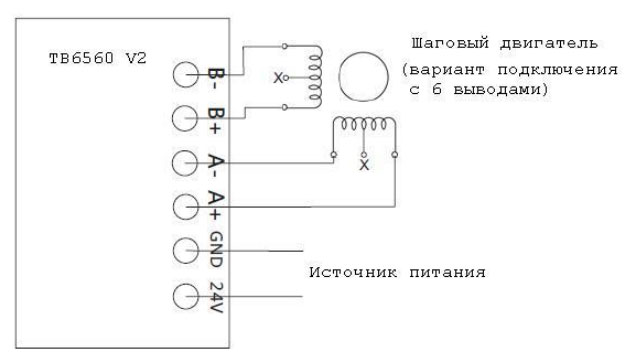
Рис.3. Подключение силовых цепей
5. Монтаж драйвера
При монтаже необходимо соблюдать следующие требования:
— Удаленность от других элементов – не менее 20 мм;
— Отсутствие вблизи нагреваемых элементов;
— Место монтажа должно быть защищено от пыли, агрессивных газов, масляного тумана, влажности и сильной вибрации.
6. Световые индикаторы
— Power: индикатор питания;
— Run: индикация режима работы.
7. Прикладное применение
Полная система управления шаговым двигателем должна содержать драйверы шаговых двигателей, шаговые приводы, источник питания постоянного тока и контроллер.
Оплата
Вы можете выбрать любой удобный для Вас способ оплаты: банковский перевод, оплата банковской картой или наличные деньги в офисе компании.
Доставка по России
Доставка товара осуществляется ТК: СДЭК, Деловые линии, ПЭК, КиТ, ЖелДорЭкспедиция. ) — см. доставка
Доставка и отгрузка товара осуществляется транспортными компаниями, после оплаты заказа. Стоимость доставки будет рассчитана менеджером после оплаты заказа. Доставка оплачивается полностью заказчиком при получении груза.
Самовывоз
Вы можете самостоятельно забрать Ваш заказ на складе по адресу Россия, Ростовская область, г. Каменск-Шахтинский, пер. Полевой 43 (координаты для навигатора 48.292474, 40.275522). Для крупногабаритных заказов воспользуйтесь транспортным средством.