Двигатель шаговый 86BYG250C-14 (NEMA 34, 6
Двигатель шаговый 86BYG250C-14 (NEMA 34, 6.0 Нм, 5.0 А, 1.8°)
Шаговый двигатель 86BYG250C-14
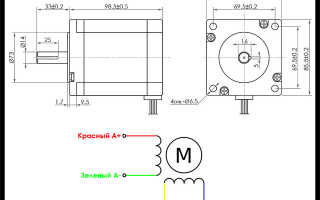
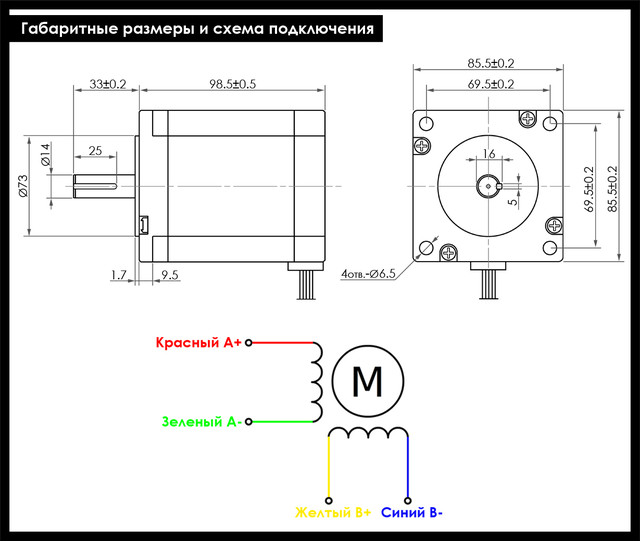
86BYG250C-14 — биполярный шаговый двигатель (2 обмотки, 4 вывода) с фланцем типоразмера NEMA 34 и моментом удержания 6.0 Нм, который применяется в станках с ЧПУ, 3D-принтерах, модулях линейного перемещения и других системах автоматизации для обеспечения точного позиционирования. Данная модель имеет вал с одной стороны диаметром 14 мм. Принцип работы такого синхронного двигателя состоит в том, что при подаче тока в одну из обмоток статора происходит фиксация ротора. Последовательная активация обмоток вызывает его дискретные угловые перемещения (шаги). Электропитание двигателя осуществляется импульсами, которые и обеспечивают поворот вала на определенный угол. Генерировать импульсы такого типа можно с помощью контроллера (генератора импульсов), а управлять обмотками двигателя с помощью драйвера шагового двигателя . 86BYG250C-14 создает заявленный момент только в состоянии покоя или при небольшой скорости (до 200 об/мин). При превышении данной скорости крутящий момент мотора снижается.
Преимущества 86BYG250C-14 :
Относительно высокий момент удержания
Возможность задавать нужный угол поворота вала двигателя
Возможность фиксирования положение ротора током удержания
Высокая точность шага
Высокая скорость старта, остановки и смены направления вращения
Не требует обратной связи для точного позиционирования
Низкая цена (в сравнении с серводвигателями)
Высокая надежность и длительный срок службы
Недостатки 86BYG250C-14 :
Значительные потери момента на высоких скоростях
Присутствует вероятность пропуска шагов при перегрузке
Высокая температура поверхности двигателя во время работы
Технические характеристики:
Типоразмер фланца: NEMA 34 (86 мм)
Длина двигателя: 98.5 мм
Количество валов: 1
Диаметр вала: 14 мм
Количество фаз: 2
Момент удержания: 6.0 Нм
Угловой шаг: 1.8° (200 шаг/об)
Точность шага: 5%
Скорость вращения: зависит от драйвера (среднее значение 700-800 об/мин)
Сопротивление фазы: 0.62 Ом
Индуктивность фазы: 3.4 мГн
Инерция ротора: 1400 гсм²
Количество выводов: 4
Класс изоляции: В
Рабочая температура двигателя: 0. 80 °C
Температура окружающей среды: -20. +50 °C

- Шаговый двигатель 86BYG250C-14 (1 шт.)
Угловой кронштейн ШД типа NEMA34  Написать
Написать
Редуктор для шагового двигателя PX86N006S0 (1:6) NEMA 34 
 Купить
Купить
Редуктор для шагового двигателя PX86N010S0 (1:10) NEMA 34  Купить
Купить
Контроллеры 
Драйверы
Импульсный блок питания S-250-48, 48V, 5.2А, 250W  Купить
Купить
Кабели 
Гибкие муфты 
Смотрите все наши объявления
- Цена: 1 734 грн.
- В наличии
- Код: 12-060
| День | Время работы | Перерыв |
|---|---|---|
| Понедельник | 09:00 — 18:00 | |
| Вторник | 09:00 — 18:00 | |
| Среда | 09:00 — 18:00 | |
| Четверг | 09:00 — 18:00 | |
| Пятница | 09:00 — 18:00 | |
| Суббота | Выходной | |
| Воскресенье | Выходной |
* Время указано для региона: Украина, Березне
Условия возврата и обмена
Компания осуществляет возврат и обмен этого товара в соответствии с требованиями законодательства.
Сроки возврата
Возврат возможен в течение 14 дней после получения (для товаров надлежащего качества).
Обратная доставка товаров осуществляется по договоренности.
 eddy_em
eddy_em
Емельянов Эдуард Владимирович
В ходе «внезапно обнаруженных особенностей» шаговых двигателей, которые предполагается использовать в криостате ИК-спектрометра (в пиковом режиме работы они выделяют 50 Вт!), а также для изучения, насколько драйвер ШД L6208N хуже драйвера TB6560AHQ, я на этой неделе провел кое-какие испытания.
Для затравки — видео:
это позорище — «измерительная установка», использующаяся в эксперименте.
Итак, на видео выше показано, как проводились измерения момента: испытуемый
шаговый двигатель был зафиксирован при помощи струбцины, на вал двигателя через
жесткую муфту был надет цилиндр диаметром 50мм, на который наматывалась нить
с подвешенным к ней грузом. Таким образом, изменяя массу подвешенного груза
можно было изменять момент силы, приложенной к валу двигателя.
Куча соплей, торчащих из макетки на столе — привычный для меня способ «наколенного макетирования» (я уже ранее выкладывал видео с управлением механикой криостата, там сопли еще страшней были). На макетке была собрана полноценная схемка с драйвером L6208N. Правда, в работе наблюдались «косяки» из-за того, что токи там довольно большие протекают, а элементы просто натыканы в разъемы макетки. Вот все это безобразие крупным планом:
Система управления двигателем была запитана от 12-вольтового китайского блока питания с регулировкой. Уровень напряжения был установлен на минимум (10.6 В).
Зависимость крутящего момента от силы тока в обмотках двигателя
2 оборотов в секунду (400 шагов/с). В полношаговом режиме работы драйвера L6208N для смещения вала двигателя на один шаг необходимо подать на драйвер четыре тактовых импульса. В полушаговом режиме один шаг двигателя соответствует восьми тактовым импульсам.
На приведенных далее графиках указывается частота тактовых импульсов,
подающихся на драйвер шагового двигателя. Соответственно, при работе в
полношаговом режиме скорость вращения вала (в шагах в секунду) в четыре раза
меньше тактовой частоты, а при работе в полушаговом режиме скорость меньше в
восемь раз.
Дальше приведена картинка с зависимостью величины крутящего момента на валу испытуемого двигателя от силы тока в обмотках. Медианное усреднение серии измерений и линейная аппроксимация результата показали, что момент на валу (в г·см) вполне линейно изменяется и примерно в 450 раз превышает силу тока в обмотках двигателя (измеренную в Амперах).
Зависимость максимальной скорости вращения вала двигателя от силы тока в обмотках при постоянной величине нагрузки на вал
Для изучения предельных скоростей вращения нагруженного вала двигателя на прикрепленный к валу цилиндр подвешивались грузы массой 100, 150 и 200г, дающие постоянный момент силы в 250, 375 и 500г·см соответственно. Чтобы массу подвеса можно было быстро изменять, я просто взял обычный пакетик с застежкой-молнией, измерил его массу на лабораторных весах и подвесил на вал при помощи ниточки. В пакет складывались гирьки от весов + при недостаче массы гирек я подкладывал болты, массу которых заранее измерил.
На картинке выше изображены результаты измерений, показавшие, что снижение тока в обмотках приводит к очень резкому снижению крутящего момента двигателя, что особо хорошо заметно на высоких скоростях вращения вала. Снижение до 50% номинального тока в обмотках двигателя приводит к падению практически до нуля его нагрузочной характеристики. Снижение силы тока в обмотках на 30% лишь незначительно ухудшает нагрузочную характеристику двигателя, для увеличения величины крутящего момента в этом случае необходимо лишь снизить скорость вращения вала.
Зависимость крутящего момента от скорости вращения вала
Выше было показано, что небольшое уменьшение номинальной силы тока в обмотках двигателя не приводит к значительному ухудшению значения крутящего момента на его валу. Для определения динамических характеристик двигателя к его обмоткам был приложен ток величиной 87.5% и 75% от номинального (1.05А и 0.9А соответственно). Кроме того, изучалась возможность увеличения крутящего момента при разгоне двигателя кратковременной установкой режима работы драйвера шагового двигателя в полушаговый режи.
Выше изображена полученная динамическая характеристика. Резкий спад крутящего момента на частотах тактовых импульсов порядка 50Гц может быть обусловлен особенностями используемого драйвера шаговых двигателей (на испытываемом ранее драйвере TB6560AHQ таких особенностей замечено не было). Похоже, либо микросхемка «захлебывается» и начинает блокироваться из-за перегрева (грелась она на малых оборотах прилично, а на скоростях выше 25шагов/с оставалась практически холодной), либо в ней установлен фильтр наводок на 50Гц, который и «дает жару» — в подробности мне вникать лень.
На скоростях ниже 50Гц в полношаговом режиме (12.5шагов/с) крутящий момент двигателя очень резко спадает до нуля (видимо, это обусловлено очень низкой индуктивностью обмоток двигателя). Наиболее оптимальной является скорость вращения двигателя около 25шагов/с (в полношаговом режиме драйвера L6208N). Динамический диапазон данного двигателя довольно узок: при увеличении скорости вращения вала до 150шагов/с (в полношаговом режиме) крутящий момент снижается в два раза. Наиболее оптимальным режимом работы двигателя является скорость от 25 до 100шагов/с (в полношаговом режиме) со стартом в полушаговом режиме драйвера. Такой режим обеспечивает высокий стартовый момент с поддержанием величины крутящего момента при дальнейшем движении с бóльшей скоростью.
Выводы
10В и силы тока в обмотках до
0.9А (т.е. снижения энерговыделения от номинальных 50.4Вт до 9Вт) за счет варьирования режимов работы драйвера шагового двигателя.
Управлять двигателем возможно как посредством драйвера TB6560AHQ, так и при помощи драйвера L6208N. Правда, лично мне больше нравится первый: он показывает значительно более красивые осциллограммы (а при дроблении шага на 16 у него на выходе почти синусоида!) и имеет большее количество «настроек».
Ну, а напоследок, чтобы не утомлять почтенную публику созерцанием изображения осциллограмм, привожу видео:
Что такое индуктивность шагового двигателя
Это довольно простая схема контроллера шагового двигателя, которая позволит вам точно управлять однополярным шаговым двигателем через параллельный порт вашего компьютера. Шаговый двигатель можно применить в конструировании роботов, в изготовлении печатных плат, использовать в качестве микродрели, автоматической кормушки для аквариумных рыбок и т.д. Если вы никогда не работали с шаговыми двигателями, то эта статья для вас.

Как работает шаговый двигатель?
Шаговые двигатели отличаются от регулируемых двигателей постоянного тока. Вместо того чтобы вращаться как двигатели постоянного тока, шаговый двигатель совершает дискретное вращение под воздействием серии импульсов. В нашем примере двигателю необходимо 48 импульсов чтобы совершить полный оборот в 360 градусов.

Другое преимущество шаговых двигателей — то, что их скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
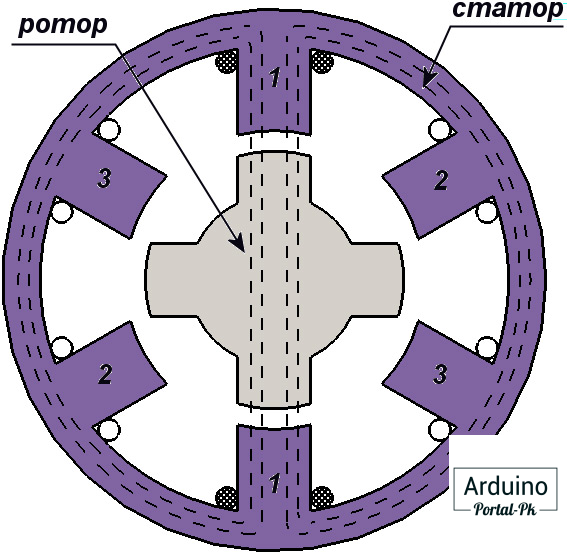
Шаговый двигатель состоит из ротора — постоянного магнита, который вращается внутри, и статор — четыре катушки (север, восток, юг, запад), которые являются частью корпуса и не перемещаются. Ротор совершает вращение посредством последовательных импульсов напряжение постоянного тока подаваемого к одной или двум катушкам одновременно.
Устройство Шагового двигателя.
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Устройство может быть построено с использованием интегральной микросхемы типа ULN2003 (отечественный аналог К1109КТ22) состоящая из набора мощных составных ключей с защитными диодами на выходе. Наличие защитных диодов позволяет подключать индуктивные нагрузки без дополнительной защиты от выбросов обратного напряжения.
Подключения шагового двигателя.


Однополярный двигатель должен иметь пять или шесть контактов в зависимости от модели. Если двигатель имеет шесть контактов то необходимо соединить выводы 1 и 2 (красный) вместе и подключить их к плюсу 12-24V напряжения питание. Оставшиеся выводы a1 (желтый), b1 (черный), a2 (оранжевый), b2 (коричневый) подключить к контроллеру согласно схеме.
Способы управления.
Есть несколько способов, которые вы можете использовать, чтобы управлять шаговым двигателем.
1. Одиночные импульсы — самый простой способ. Одновременно подключается только одна катушка. Необходимо 48 пульсов чтобы ротор совершил один полный оборот. Каждый пульс перемещает ротор на 7,5 градусов.

2. Двойной импульс — одновременное подключение двух соседних катушек. В этом случае также необходимо 48 пульсов чтобы ротор совершил один полный оборот. Каждый пульс перемещает ротор на 7,5 градусов.

3. Комбинированные импульсы — чередование первого и второго способа. Двигатель нуждается в 96 пульсах, чтобы совершить один оборот. Каждый пульс перемещает ротор приблизительно на 3,75 градуса.

Программное обеспечение контроллера шагового двигателя.
Для управления работой шагового двигателя используем компьютер и программу. При использовании компьютера вы будете в состоянии сделать намного больше с вашим шаговым двигателем и наиболее важно — визуализировать, как ток течет через катушки.

В программе понятный графический интерфейс, который позволяет точно управлять скоростью двигателя и направлением вращения в реальном времени, а также позволяет выбирать способы управления. Программа работает с версией Windows (98/ME/2000/XP).
 Скачать программу
Скачать программу
(104.2 Kb, скачено — 5,962 )
Принципиальные особенности и применение шаговых двигателей.

Шаговый двигатель – это электродвигатель постоянного тока, без контактных щеток, у которого полный оборот делится на определенное число равных шагов. Положение данного устройства может затем быть задано для перемещения и удержания на одном из этих этапов без какого-либо датчика положения для обратной связи (контроллер с разомкнутым контуром), при условии, что механизм тщательно подобран для применения в отношении крутящего момента и скорости. Импульсные двигатели с переключением — это очень большие шаговые приборы с уменьшенным числом полюсов и, как правило, с замкнутым контуром.
По мере вращения шагового двигателя индуктивность каждой обмотки колеблется через пики и падает несколько раз за оборот. Крутящий момент генерируется по мере того, как под напряжением обмотка перемещается от вершины к долине, вызывая уменьшение энергии, запасаемой в ее магнитном поле. Это снижение энергии поля непосредственно переводится на механическую работу.
Области применения
От простых DVD плееров или принтеров в быту до сложнейших станков с ЧПУ или роботизированной руки шаговые двигатели можно найти практически везде. Способность совершать точные движения с электронным управлением позволила этим устройствам найти применение во многих сферах, таких как камеры наблюдения, жесткие диски, станки с ЧПУ, 3D-принтеры, робототехника, сборочные роботы, лазерные резаки и многое другое.
Перед тем, как купить шаговый двигатель, нужно ознакомиться с основными преимуществами и недостатками:
Преимущества
- Достигнута низкая стоимость контроля;
- Высокий момент вращения при запуске и низкая скорость;
- Простота конструкции;
- Низкие эксплуатационные расходы;
- Меньше шансов затормозить или поскользнуться;
- Будет работать в любой среде;
- успешно используется в робототехнике в широком масштабе;
- Высокий уровень надежности;
- Обладает полным крутящим моментом в состоянии покоя (во время нахождения обмоток под напряжением);
- Большая точность позиционирования и повторяемость движения;
- Немедленный ответ на запуск / останов / реверс;
- Обладает высокой степенью надежности, благодаря отсутствию контактных щеток;
Недостатки шагового двигателя
- Потребляет большее количество энергии по сравнению с двигателями постоянного тока;
- При более высокой скорости значение крутящего момента уменьшается;
- Снижение эффективности;
- Возникает состояние резонанса;
- На высокой скорости управление невозможно.
Понравилась статья пишите в комментарии или на форум. Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Понравилась статья? Поделитесь ею с друзьями: