
Технологический комплекс НВО Резонанс И100-17
Технологический комплекс НВО «Резонанс» И100-17
Соседние разделы:
- Технологический комплекс «ШМЕЛЬ»
- Технологический комплекс НВО «Резонанс» И100-17
- Ультразвуковая дробеструйная обработка (ультразвуковая галтовка). Установка И100-50
Технологический комплекс НВО «Резонанс» И100-17 предназначен для стабилизации размеров сварных и литых конструкций, а также снижения остаточных напряжений методом низкочастотной вибрационной обработки.
Размерная нестабильность изделий во времени определяется величиной и распределением остаточных напряжений вносимых сваркой, пластическим деформированием материала и подобными технологическими операциями. Широко известным способом снижения напряжений является термическая обработка. Однако присущие термообработке недостатки, связанные с высокой энергоемкостью, с межцеховыми перевозками, неоднозначным воздействием температуры на прочностные свойства материала, дополнительными мерами по снятию окалины ограничивают применение этого метода на производстве. В некоторых случаях, например, при больших габаритах конструкции, на этапе финишной механической обработки термическая обработка практически неприменима.


Низкочастотная вибрационная обработка (НВО), как один из известных способов снижения остаточных напряжений, свободна от недостатков термической обработки, менее энергоемка (практически ниже на два порядка), не требует для своего применения капитальных затрат и может выполняться на рабочем месте, где изготавливается изделие. Рациональный выбор технологических режимов обработки (виброусилие, время и частота) позволяет избежать снижения ресурса обрабатываемых изделий.
Состав поставляемого оборудования:
- вибровозбудитель
- пульт управления вибровозбудителем
Технические характеристики вибровозбудителей
| И100-17-0.5 | И100-17-1.0 | |
| Тип вибровозбудителя | центробежный, с круговой возмущающей силой и дисбалансом, регулируемым в не вращающемся состоянии | центробежный, с круговой возмущающей силой и дисбалансом, регулируемым в не вращающемся состоянии |
| Тип двигателя | асинхронный | асинхронный |
| Мощность двигателя, кВт | 0.5 | 1.0 |
| Частотный диапазон, Гц | 10 — 120 | 10 — 120 |
| Максимальное виброусилие, кН | 18 | 18 |
| Масса, кг | 15 | 30 |
| Габариты, мм | 270х190х210 | 350х250х270 |
Вибровозбудители позволяют плавно регулировать виброусилие в диапазоне от 0 до 18 кН, что обеспечивает возможность обработки практически всех деталей машиностроения.
Пульт управления НВО «Резонанс» И100-17 позволяет оперативно менять частоту, контролировать параметры обработки.
Технические характеристики пульта управления
| Частотный диапазон, Гц | 0 — 400 |
| Точность поддержания частоты, Гц | ±0.5 |
| Диапазон встроенного таймера, мин | 0 — 100 |
| Дискретность установки таймера, мин | 1 |
| Напряжение питания, В | 380 |
| Максимальная потребляемая мощность, Вт | 1050 |
| Масса, кг | 8.5 |
| Габариты, мм | 430х370х170 |
Технологический комплекс НВО «Резонанс», И100-17 — новое поколение устройств предназначенных для низкочастотной виброобработки. НВО «Резонанс» выгодно отличается от ранее разработанного комплекса ВТУ по следующим параметрам:
— надежностью (асинхронный двигатель вибровозбудителя вместо использующегося в ВТУ коллекторного двигателя постоянного тока);
— наличием микроконтроллерного управления;
— наличием системы автоматического документирования проведенной обработки;
— возможностью получения амплитудно-частотной характеристики обрабатываемой металлоконструкции без использования дополнительных приборов;
— точным определением резонансной частоты металлоконструкции и работа с возможностью поддержания рабочей частоты с точностью 0.1 Гц.
Перечисленные преимущества комплекса НВО «Резонанс», И100-17, позволяют проводить низкочастотную виброобработку с максимальной эффективностью и минимальными затратами по времени.
ПРИМЕРЫ ПРИМЕНЕНИЯ ТЕХНОЛОГИЧЕСКОГО КОМПЛЕКСА НВО «РЕЗОНАНС» И100-17
ВНЕДРЕНИЯ ТЕХНОЛОГИЧЕСКОГО КОМПЛЕКСА НВО «РЕЗОНАНС» И100-17
Для измерения, индикации и визуализации поля мехнических (остаточных) напряжений поставляется сканер мехнических напряжений «STRESSVISION Expert» производства компании «Феррологика», г. Санкт-Петербург, http://ferrologica.ru
«STRESSVISION ® » — новое название сканера-дефектоскопа магнитоанизотропного «Комплекс-2.05»
 |  |
Сканер механических напряжений STRESSVISION ® предназначен для измерения, индикации и послойной 3D-визуализации поля механических (остаточных, технологических) напряжений объектов контроля из низколегированных и низкоуглеродистых сталей.
Возможности «STRESSVISION Expert»:
- обработка результатов измерений и построение 2D и 3D-картограмм разности главных механических напряжений (РГМН), коэффициентов концентрации механических напряжений (КМН), коэффициентов неоднородности напряжений (КНН) и градиента РГМН в режимах «Сумма слоев», «Тонкий слой 0, . 3 мм», «Толстый слой 0, . 6 мм»;
- построение картограмм РГМН, КМН, КНН и градиента РГМН в виде части цилиндра, по результатам измерений на объектах кругового сечения;
- долговременное энергонезависимое хранение данных большого объема;
- ведение архива данных в СУБД программы;
- ввод и корректировка порогов классов напряженного состояния на основании действующих документов (приказа, распоряжения, РД, СНиП и пр.);
- автоматизированное формирование Заключения по результатам обследования зон контроля с приложением всех картограмм, использованных при создании документа.
Россия, Санкт-Петербург,
Телефон: (812) 329-4961
Тел./факс: (812) 329-4962
Резонанс Асинхронного Двигателя , Все Про Генератор Тариеля
- Авторизуйтесь для ответа в теме
#1 morfius


Получение резонанса в асинхронном трехфазном двигателе,а также все о генераторе Тариеля
Друзья просьба по возможности воздержатся от флудеразма и всяких высказываний только по делу кто хочет секретничать можите сюда не писать
желательно результаты каких либо эксперементов по этим направлениеям скажим это так клюб единомышлиников.
- Наверх
#2 DDR

 morfius (05 Октябрь 2010 — 23:46) писал:
morfius (05 Октябрь 2010 — 23:46) писал:
Получение резонанса в асинхронном трехфазном двигателе,а также все о генераторе Тариеля
Друзья просьба по возможности воздержатся от флудеразма и всяких высказываний только по делу кто хочет секретничать можите сюда не писать
желательно результаты каких либо эксперементов по этим направлениеям скажим это так клюб единомышлиников.
- Наверх
#3 morfius
- Наверх
#4 DDR
- Наверх
#5 morfius
- Наверх
#6 morfius
- Наверх
#7 aksa

morfius (23 Октябрь 2010 — 20:21) писал:
- Наверх
#8 morfius
- Наверх
#9 Heeppy

- Наверх
#10 emercom26

- Наверх
#11 morfius
- Наверх
#12 morfius
- Наверх
#13 metatrion

morfius (04 Ноябрь 2010 — 21:48) писал:
- Наверх
#14 eBabitski

- Наверх
#15 metatrion
- Наверх
#16 eBabitski
- Наверх
#17 metatrion
- Наверх
#18 eBabitski
- Наверх
#19 metatrion
- Наверх
#20 eBabitski
Выбираем драйвер шагового двигателя
Шаговый двигатель — двигатель со сложной схемой управления, которому требуется специальное электронное устройство — драйвер.

Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach3, LinuxCNC или PureMotion.
Задача драйвера — изменять ток в обмотках как можно более эффективно. Поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т. п.
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1. Драйверы постоянного напряжения. Эти драйверы подают постоянный уровень напряжения поочередно на обмотки. Результирующий ток зависит от сопротивления обмотки, а на высоких скоростях — и от индуктивности. Эти драйверы крайне неэффективны и могут быть использованы только на очень малых скоростях.
2. Двухуровневые драйверы. В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны. Помимо прочего, они снижают нагрев двигателей. Их все еще можно иногда встретить в высококлассном оборудовании. Однако такие драйверы поддерживают только режим шага и полушага.
3. Драйверы с ШИМ. На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны. Практически все представленные сейчас на рынке драйверы как раз этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижении током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем. Иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ.
Лучше, если частота драйвера будет более 20 кГц. И вообще, чем она больше, тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, в результате шаговые моторы начинают издавать неприятный писк.
Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные.
Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей. Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т. п.
ВЫБОР ДРАЙВЕРА ДЛЯ ШАГОВОГО ДВИГАТЕЛЯ
Cила тока
Первый параметр, на который стоит обратить внимание, — это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя.
Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15–40 % больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель. С другой стороны, не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Напряжение питания
Второй момент — это напряжение питания. Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно — напряжение питания влияет на динамику (момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8–10. Если максимальное указанное напряжение питания драйвера резко отличается от данных величин, стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя, тем большее напряжение требуется для драйвера.
Существует эмпирическая формула U = 32 * √(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера. U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы PLD86, PLD880.
Наличие опторазвязанных входов
Третий аспект — наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер — устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, приобретая незнакомую модель, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Наличие механизмов подавления резонанса
Четвертый аспект — наличие механизмов подавления резонанса. Резонанс шагового двигателя — явление, которое проявляется всегда. Разница состоит только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС-индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга — такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все драйверы Purelogic R&D. Драйверы с подавлением резонанса — высококачественные устройства, и если бюджет позволяет, лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим: основная масса проданных драйверов не имеют компенсации резонанса. Тем не менее, десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Наличие защитных функций
Шестой аспект — наличие защитных функций. Среди них — защита от превышения питающего напряжения, тока обмоток (в т. ч. от короткого замыкания обмоток), переполюсовки питающего напряжения, неправильного подключения фаз шагового мотора. Чем больше таких функций, тем лучше.
Наличие микрошаговых режимов
Седьмой аспект — наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, чем больше деление при прочих равных условиях, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов. Так, для драйвера с входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ-контроллер, то 100 кГц, скорее всего, будет Вашим потолком, что соответствует делению 1/32.
Наличие дополнительных функций
Восьмой аспект — наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т. п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Качество драйвера
Девятый, и самый важный аспект — качество драйвера. Оно практически не связано с характеристиками и т. п. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как подавление резонанса, морфинг, а также воспользоваться проверенным способом — ориентироваться на бренды и качество технической поддержки.
Резонанс — друг и враг
Резонанс — это явление резкого возрастания амплитуды вынужденных колебаний системы, которое наступает при приближении частоты внешнего воздействия к определенным значениям (резонансных частот), обусловленным свойствами системы. Таким образом, причиной резонанса является совпадение внешней (возбуждающей) частоты с внутренней (собственной) частотой колебательной системы.
Резонанс встречается в механике, электронике, оптике, акустике, астрофизике.
Явление резонанса лежит в основе проектирования музыкальных инструментов: рояля, скрипки, флейты .
Используется явление резонанса и в электронике. Колебательный контур, состоящий из емкости и индуктивности, используется в элементах настройки и электрических фильтрах. Однако резонанс может быть и вредным, если он вызывает искажение сигнала или паразитные шумы.
Наблюдается резонанс и в космосе, когда два небесных тела, которые имеют периоды обращения, относящихся друг с другом как небольшие целые числа, делают регулярное гравитационное воздействие друг на друга, которое может стабилизировать их орбиты (орбитальный резонанс в небесной механике).
Однако наиболее часто резонанс бывает в классической и строительной механике, а также гидро- и аэромеханике. И, к сожалению, во многих случаях именно тогда, когда он совершенно нежелателен.
. Известно, что военным подразделениям при прохождении мостов приписывается «сбивать ногу» и идти не строевым, а свободным шагом. Горький опыт некоторых катастроф научил военнослужащих в подобных ситуациях отходить от многовековых традиций.
Так, 12 апреля 1831 разрушился Бротонский подвесной мост через реку Ирвелл в Англии, когда по нему шел военный отряд. Частота шагов воинов, шагавших в ногу, совпала с частотой собственных колебаний моста, через которые амплитуда резко возросла, цепи оборвались, и мост рухнул в реку. Именно этот случай, в результате которого два десятка человек были травмированы, способствовал принятию в британской армии правила «идти не в ногу» при прохождении войсками мостов. По той же причине в 1850 году неподалеку от французского города Анже был разрушен подвесной цепной мост над рекой Мин длиной более ста метров, что привело к многочисленным жертвам. Также существует версия, что 1905 году в результате прохождения кавалерийского эскадрона через резонанс разрушился и Египетский мост через реку Фонтанку в Петербурге. Однако эта версия, скорее всего, безосновательна, поскольку не существует методов дрессировки значительного количества лошадей для их движения «в ногу».
Причиной разрушения мостов из-за резонанса могут стать не только пешеходы, но и железнодорожные поезда. Для исключения резонанса моста поезд может двигаться или медленно, или на максимальной скорости (вспомните, как замедляют ход поезда метрополитена во время их движения через мост Метро в Киеве). Это обычно делается для исключения совпадения частоты ударов колес по стыкам рельсов с собственной частотой колебаний моста (по этой же причине участок рельсов на мосту часто выполняют сплошной, т.е. без стыков).
Катастрофические последствия для мостов могут послужить также и от воздействия ветра. Так, 7 ноября 1940 через игнорирование действия ветровой нагрузки на мост при его проектировании и вследствие возникновения резонанса разрушился Такомский подвесной мост общей длиной 1800 м и длиной центрального пролета 850 м (США).
С резонансом можно столкнуться не только на суше, но и на море и в воздухе. Так, при некоторых частотах вращения гребного вала в резонанс входили даже корабли. А на заре развития авиации некоторые авиационные двигатели вызывали столь сильные резонансные колебания элементов самолета, что он полностью разрушался в воздухе.
Причиной резонанса элементов летательных аппаратов и их разрушение может стать и флаттер — сочетание самовозбуждающиеся незатухающих изгибающих и крутильных автоколебаний элементов конструкции (главным образом крыла самолета или несущего винта вертолета). Одним из путей борьбы с этим явлением является использование так называемых протифлатерных грузов.
Интересно, что крепления двигателей на пилонах крыльев самолетов — это не прихоть конструкторов и дизайнеров, а насущная необходимость, поскольку двигатели демпфирующие колебания крыла в полете воздушного судна, будучи при этом своеобразным протифлатерним грузом.
Также известны случаи, когда во время выступлений знаменитого русского певца Федора Ивановича Шаляпина часто лопались плафоны в люстрах. И происходило это опять же через резонанс, когда частота собственных колебаний стекла совпадала с частотой акустических волн, воспроизводимых певцом.
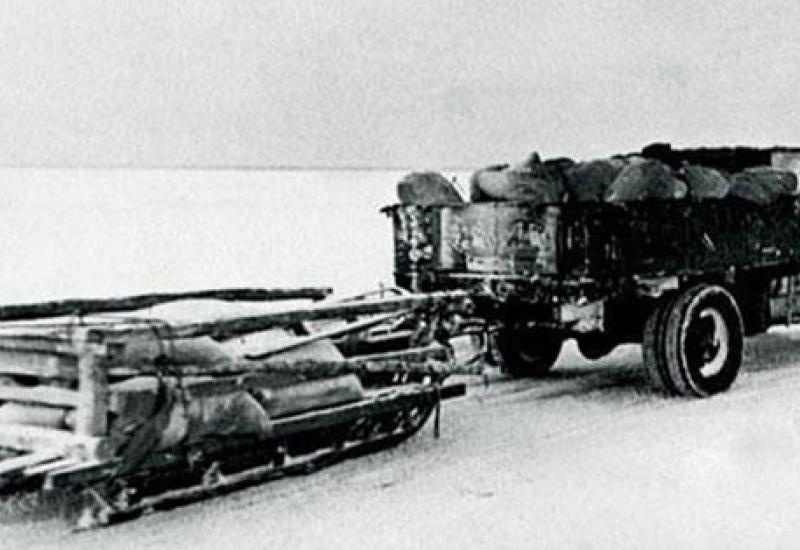
Еще более интересным фактом является то, что во время Великой Отечественной войны все тот же резонанс едва не поставил под угрозу существование единой ниточки, проходившей по льду Ладожского озера и связывала блокадный Ленинград с «большой землей».
. Во время наведения участка Дороги жизни по Ладожскому озеру защитники Ленинграда неожиданно столкнулись с необычным явлением, когда после нормального прохождения по льду тяжелого грузовика, легкая машина, которая шла по тому же пути, нередко проваливалась под лед.
Перед учеными была поставлена задача срочно разобраться с ситуацией, сложившейся и предоставить рекомендации по преодоления автомобилями ледяного покрова. В южной части Ладожского озера, под артиллерийским и минометным огнем врага гидрограф и гидротехники проводили эксперименты по определению предельных нагрузок на лед. Все выводы ученых поступали в Ледовую службу Морской обсерватории. Было изучено деформационную устойчивость льда под статической нагрузкой и данные про упругие деформации льда при распространении по льду взрывной волны. При проведении автоколонн по Ладоге наблюдались и неизвестные ранее колебания ледяного покрова: водяной волна, образовавшаяся под льдом проседала, двигалась с постоянной для определенной толщины льда и глубины водоема скоростью. Она могла опережать приложенную нагрузку или отставать от нее, но опасным было совпадения этих скоростей — тогда вода прекращала поддержку ледяного покрова, и поддержка обеспечивалась только упругими свойствами льда. При этом наступал резонанс, что приводило к разрушению льда. Это проявление резонанса было названо изгибно-гравитационной волной.
По результатам исследований для автомобилей, которые двигались по льду, были установлены определенные скорости и дистанции. Ежедневно по ледяному покрову в обе стороны перевозилось около 6 тыс. Тонн грузов, а общее количество доставленных в Ленинград по Дороге жизни грузов за весь период ее существования составила более 1 млн 615 тыс. Тонн. Также за это же время с осажденного города было эвакуировано около 1 млн 376 тыс. Его жителей.
С учетом приобретенного опыта позже был разработан резонансный метод разрушения льда, энергоемкость которого в несколько раз меньше энергоемкости традиционного разрушения ледяного покрова с помощью ледоколов и ледокольного навесного оборудования.
Как видим, резонанс может быть достаточно коварным, но укротить его и вернуть на пользу человеку вполне по силам!

