Что такое сар двигатель
Что такое сар двигатель
13. Системы автоматического регулирования
Все рисунки, за исключением рис.102, выполнены автором .
Системы автоматического регулирования (САР) применяются для регулирования отдельных параметров (температура, давление, уровень, расход и т.д.) в объекте управления. В современных системах автоматического управления (САУ) системы автоматического регулирования являются подсистемами САУ и их применяют для регулирования различных параметров при управлении объектом или процессом.
Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
Для осуществления автоматического регулирования к регулируемому объекту подключается автоматический регулятор, вырабатывающий управляющее воздействие на регулирующий орган. Это управляющее воздействие вырабатывается регулятором в зависимости от разности между текущим значением регулируемой величины (температуры, давления, уровня жидкости и т. д.), измеряемой датчиком, и желаемым её значением, устанавливаемым задатчиком. Регулируемый объект и автоматический регулятор вместе образуют систему автоматического регулирования.
Основным признаком САР, является наличие главной обратной связи, по которой регулятор контролирует значение регулируемого параметра.
Пример системы регулирования температуры
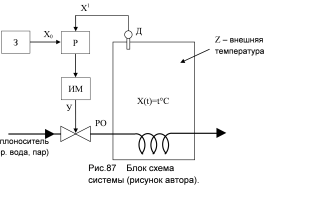
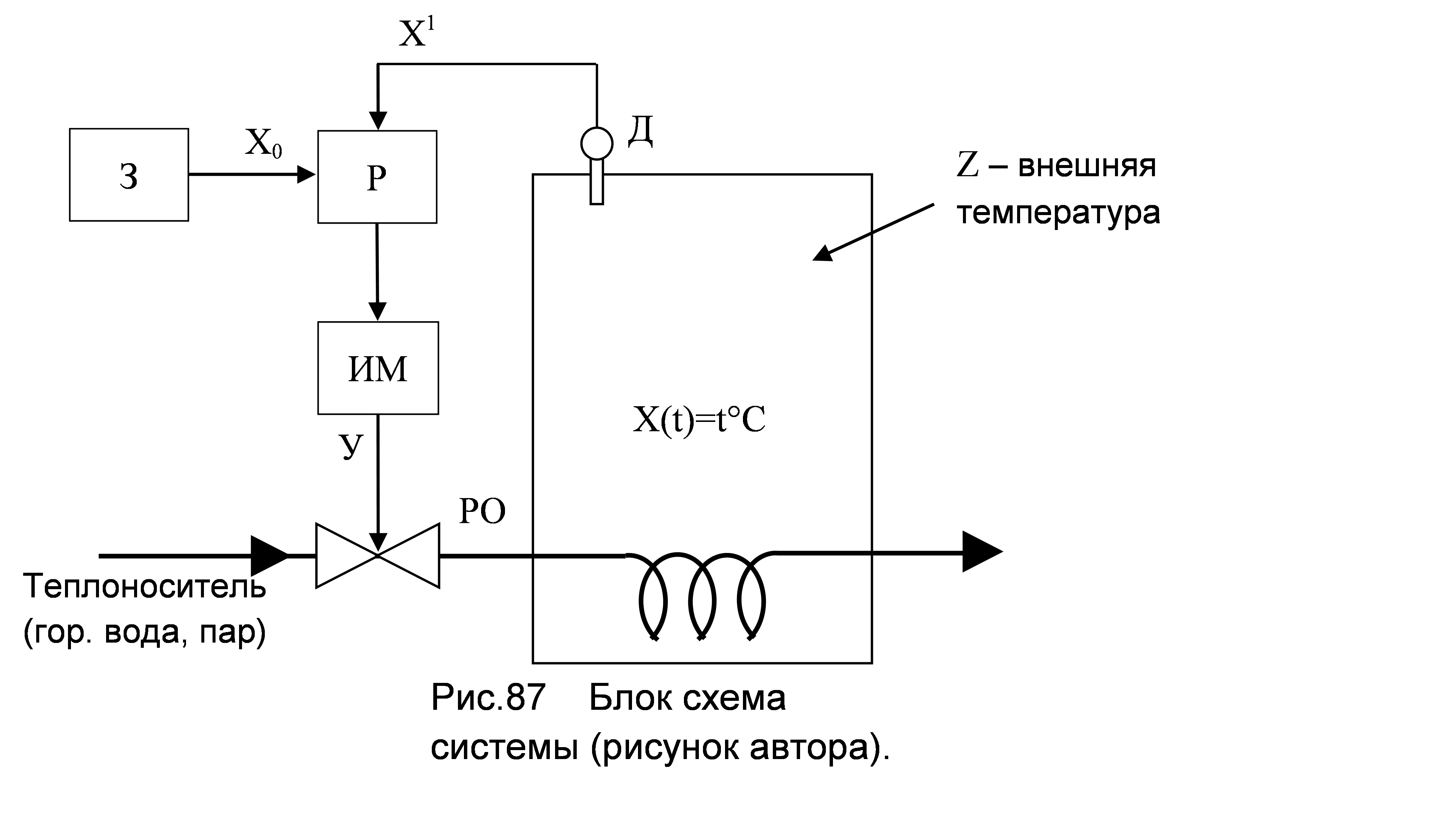
На Рис. 87 показана блок схема системы регулирования температуры в объекте, а на Рис. 88 функциональная схема САР, показывающая общий принцип работы любой системы автоматического регулирования.
Если температура в объекте равна заданной, то сигнал с датчика X 1 равен сигналу с задатчика X и сигнал ошибки на входе регулятора е = X 1 — X = 0 QUOTE , сигнала на выходе регулятора нет, ИМ не работает и клапан открыт на заданную величину, поддерживая заданную температуру. Если, например, температура в объекте увеличиться, увеличиться сигнал с датчика X 1 , возникнет ошибка «е», заработает ИМ и, прикроет клапан РО для уменьшения подачи тепла, температура в объекте уменьшится до заданной.
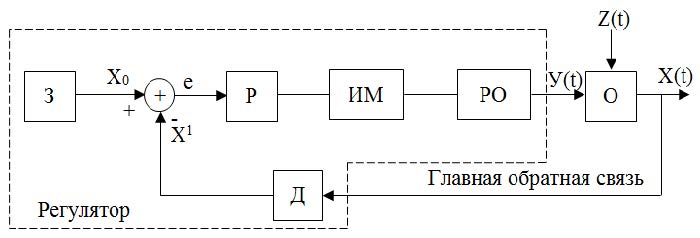
Рис. 88 Функциональная схема САР
З – задатчик, для установки заданного значения параметра X
Д – датчик (термопара, терморезистор, датчик уровня, скорости и др. для разных систем)
ИМ – исполнительный механизм (эл. мотор с редуктором, пневмоцилиндры и др.)
РО – регулирующий орган (кран, вентиль, заслонка и др.)
О – объект регулирования (печь, эл. мотор, резервуар и др.)
У – регулирующее (управляющее) воздействие
Z – помеха (возмущение)
Х – регулируемый параметр
X 1 – сигнал на выходе датчика
е = X 1 — X ошибка, возникает при отклонении параметра от задания
X – заданное значение регулируемого (управляемого) параметра может быть постоянным X или изменяемым (Ut).
Сигнал с задатчика может быть:
-постоянным X = const . для поддержание постоянства регулируемого параметра температуры, давления, уровня жидкости и т. д. (системы стабилизации);
-может изменяться во времени U(t) по определённой программе (программное регулирование);
-может изменяться во времени U(t) в соответствии с измеряемым внешним процессом (следящее регулирование).
1.От каких воздействий может измениться регулируемый параметр?
2.Как действует обратная связь, и для чего она нужна?
3.Какие функции выполняют Д и ИМ?
4.Как действует система при возникновении ошибки «е»?
5.Приведите пример системы стабилизации и следящей системы?
Что такое сар двигатель

- Изготовление деталей на заказ по чертежам заказчика
- Металлообработка
- Изготовление корпусов и приборов из металла
- Гидроабразивная резка металла
- Гидроабразивная резка камня
- Гибка листового металла
- Сварочные работы
- Токарные работы
- Фрезерные работы
- Пескоструйная обработка деталей
- Термическая обработка деталей
- Изготовление деталей на заказ по чертежам заказчика
- Металлообработка
- Изготовление корпусов и приборов из металла
- Гидроабразивная резка металла
- Гидроабразивная резка камня
- Гибка листового металла
- Сварочные работы
- Токарные работы
- Фрезерные работы
- Пескоструйная обработка деталей
- Термическая обработка деталей
- Профессиональное образование
- Школьное оборудование
- Помощь в выборе учебного оборудования
- Профессиональное образование
- Школьное оборудование


.gif)
Учебное оборудование Панель 5120 «ПИД регулятор» предназначена для проведения лабораторных практических работ (опытов) по дисциплинам «Теория автоматического управления» (ТАУ), «Системы автоматического регулирования» (САР). Учебное оборудование Панель 5120 «ПИД регулятор» может использоваться в качестве управляющего модуля для учебных панелей:
- 5125 Панель «Силовая электроника»
- 5130 Панель «Двигатель постоянного тока»
- 5125.5 Модуль «Регулирование яркости и температуры»
- 5131 Панель «Сервомотор»
Особенности и преимущества:
- Универсальная тренировочная система по системам автоматического регулирования (САР)
- Встроенный источник питания с защитой от короткого замыкания
- Все основные эксперименты можно проводить без использования запоминающего осциллографа
- Встроенные схемы с претриггером гарантируют отображение полного сигнала
- Элементы панели могут использоваться в качестве объектов исследования с помощью компьютера
- Подробное руководство по проведению лабораторных практических работ (опытов)


.jpg)
Учебно-методическое пособие в трех частях «Системы автоматического регулирования (САР)» предназначено для учащихся учреждений высшего и среднего профессионального образования, изучающих управление в технических системах. Для успешного освоения всех предлагаемых материалов учащиеся должны обладать начальными знаниями в области высшей математики и электроники.
Первая часть пособия – «Введение в технику регулирования» – посвящена изучению принципов работы систем автоматического регулирования и содержит описания экспериментов, которые выполняются на электронных моделях учебной панели «ПИД регулятор» фирмы «hps System Technik» (Германия). В первую часть включены также основные сведения из теории автоматического регулирования, необходимые для понимания процессов, происходящих в САР.
Учебные модули серии 9500 совместно с панелями 8175, 8176, 1012.1, 1012.2 предназначены для проведения лабораторных работ по дисциплинам «Теория автоматического управления» (ТАУ), «Системы автоматического регулирования» (САР).
Особенности и преимущества:
- Модульная учебная система по основам автоматического управления и регулирования
- Понятность экспериментов, т.к. для каждого эксперимента используются только необходимые модули
- Малое время подготовки к эксперименту, вследствие единого источника питания
- Индивидуальная комбинация модулей
- Дополнительно могут использоваться учебные панели 5130 «Двигатель постоянного тока», 5131 «Сервомотор» и 5125.5 модуль «Регулирование температуры и освещенности»
- Детальное руководство по проведению лабораторных практических работ (опытов)
Учебное оборудование Панель 5130 «Двигатель постоянного тока» предназначена для проведения лабораторных работ по дисциплинам «Силовая электроника», «Системы автоматического регулирования», «Техника связи». Она используется совместно с панелями 5125 «Силовая электроника», 5120 «ПИД регулятор» или 4250 «Фазовая автоматическая подстройка частоты» (ФАПЧ).
Особенности и преимущества:
- Универсальная система контроля частоты вращения
- Может быть дополнена модулем контроля температуры и яркости
- Есть встроенный 4-квадрантный индикатор
- С переменной центробежной массой
- 2-канальный энкодер
- Встроенный 4-квадрантный усилитель
Учебное оборудование Панель 5131 «Сервомотор» применяется для проведения лабораторных работ по дисциплинам «Теория автоматического управления» и «Системы автоматического регулирования». Используется совместно с учебной панелью 5120 «ПИД регулятор».
Особенности и преимущества:
- Универсальная система контроля положения
- Аналоговое значение угла
- С подключением мешающих факторов (механизм игры)
- Возможность дополнения панели рефлективным датчиком для цифровых измерений угла
- Цифровые измерения направления вращения и числа оборотов
- Цифровые управляющие входы для обоих направлений вращения
.jpg)
Учебно-методическое пособие в трех частях «Системы автоматического регулирования (САР)» предназначено для учащихся учреждений высшего и среднего профессионального образования, изучающих управление в технических системах. Для успешного освоения всех предлагаемых материалов учащиеся должны обладать начальными знаниями в области высшей математики и электроники.
Вторая часть пособия – «Объекты управления и регулирующие цепи» – посвящена экспериментальным исследованиям регулируемого электропривода постоянного тока и исполнительного электропривода на действующих механических моделях. Для проведения экспериментов, предлагаемых во второй части, используются все четыре учебные панели hps: «ПИД регулятор», «Электропривод постоянного тока», «Исполнительный электропривод» и «Силовая электроника».
В каждой главе представлены, где это нужно, следующие разделы:
- Введение
- Одна или несколько измерительных серий
- Результаты измерений, их анализ и обсуждение
Учебное оборудование Панель 3891 «Управление PCI» является интерфейсом между компьютером и панелями для цифровых технологий, техники управления и измерений.
Особенности и преимущества:
- Универсальный интерфейс для цифровых технологий, систем управления и измерений
- Программное обеспечение для цифровых технологий, систем управления и измерений
- Возможно прямое подключение других панелей: «Цифровая электроника 2», «Двигатель постоянного тока», «Сервомотор», «Шаговый двигатель» и «ПИД регулятор»
- 4 аналоговых входа, 2 аналоговых выхода / 8 цифровых входов и выходов
Моделирование системы автоматического регулирования частоты вращения дизельного двигателя
Рассмотрена актуальная проблема улучшения качества процесса регулирования частоты вращения коленчатого вала дизельных двигателей. Описаны принципы регулирования этого параметра, реализуемые в двигателях внутреннего сгорания. Показаны преимущества пропорционально-интегрально-дифференциального принципа регулирования. Проведены расчетные исследования влияния структуры пропорционально-интегрально-дифференциального регулятора на динамические показатели системы автоматического регулирования частоты вращения дизеля. Исследованы переходные процессы разгона–торможения и наброса–сброса нагрузки двигателя КамАЗ-740 дизель-генераторной установки мощностью 100 кВт. Получены переходные процессы такой системы регулирования при различных значениях коэффициентов пропорциональной, интегральной и дифференциальной составляющих пропорционально-интегрально-дифференциального закона регулирования. Выполнена оценка влияния этих коэффициентов на показатели качества процесса регулирования — продолжительность переходного процесса и перерегулирование.
Литература
[1] Системы управления дизельными двигателями. Москва, Изд-во «За рулем», 2004. 480 с.
[2] Системы управления бензиновыми двигателями. Москва, Изд-во «За рулем», 2005. 432 с.
[3] Александров А.А., Иващенко Н.А., ред. Машиностроение. Энциклопедия. Том IV. Двигатели внутреннего сгорания. Москва, Машиностроение, 2013. 784 с.
[4] Грехов Л.В., Иващенко Н.А., Марков В.А. Системы топливоподачи и управления дизелей. Москва, Легион-Автодата, 2005. 344 с.
[5] Пинский Ф.И., Давтян Р.И., Черняк Б.Я. Микропроцессорные системы управления автомобильными двигателями внутреннего сгорания. Москва, Изд-во «Легион-Автодата», 2001. 136 с.
[6] Крутов В.И. Автоматическое регулирование и управление двигателей внутреннего сгорания. Москва, Машиностроение, 1989. 416 с.
[7] Марков В.А., Фурман В.В., Бебенин Е.В. Совершенствование системы регулирования частоты вращения дизельного и газодизельного двигателей. Автогазозаправочный комплекс + альтернативное топливо, 2016, № 4, с. 12–29.
[8] Денисенко В.В. ПИД-регуляторы: принципы построения и модификации. Современные технологии автоматизации. Ч. 1, 2006, № 4, с. 66–74.
[9] Денисенко В.В. ПИД-регуляторы: принципы построения и модификации. Современные технологии автоматизации. Ч. 2, 2007, № 1, с. 90–98.
[10] Денисенко В.В. ПИД-регуляторы: вопросы реализации. Современные технологии автоматизации, 2007, № 4, с. 86–97.
[11] Кутрубас В.А., Сычева Е.Е. Эффективный ПИД-регулятор. Промышленные АСУ и контроллеры, 2013, № 5, с. 60–65.
[12] Марков В.А., Поздняков Е.Ф., Шленов М.И. Система автоматического регулирования частоты вращения коленчатого вала дизеля. Автомобильная промышленность, 2007, № 10, с. 12–14.
[13] Боковиков А.Н., Кузнецов А.Г. Результаты полунатурного моделирования режимов работы автомобильного дизеля. Грузовик, 2009, № 12, с. 15–17.
[14] Хрящев Ю.Е., Тихомиров М.В., Епанешников Д.А. Алгоритмы управления двигателями внутреннего сгорания. Якутск, Изд-во ЯГТУ, 2014. 204 с.
[15] Пупков К.А., Егупов Н.Д., ред. Методы классической и современной теории автоматического управления. В 5 т. Т. 1. Математические модели, динамические характеристики и анализ систем автоматического управления. Москва, Изд-во МГТУ им. Н.Э. Баумана, 2004. 656 с.
[16] Пупков К.А., Егупов Н.Д., ред. Методы классической и современной теории автоматического управления. В 5 т. Т. 5. Методы современной теории автоматического управления. Москва, Изд-во МГТУ им. Н.Э. Баумана, 2004. 784 с.
[17] Шегал А.А. Применение программного комплекса Multisim для проектирования устройств на микроконтроллерах: лабораторный практикум. Екатеринбург, Изд-во УФУ, 2014. 118 с.
[18] Бесперстов Э.А. Исследование логических схем с использованием программного комплекса Multisim: лабораторный практикум. Санкт-Петербург, Изд-во БГТУ, 2006. 64 с.
[19] Поздняков Е.Ф. Анализ эффективности использования регулятора частоты вращения с последовательно включенными корректирующими звеньями в дизельном двигателе дизель-генераторной установки. Дис. … канд. техн. наук. Москва, МГТУ им. Н.Э. Баумана, 2009. 150 с.
[20] Боковиков А.Н. Использование турбокомпрессора с турбиной изменяемой геометрии для повышения экологических и экономических показателей дизеля. Дис. … канд. техн. наук. Москва, МГТУ им. Н.Э. Баумана, 2011. 171 с.
[21] Попов Е.П. Теория линейных систем автоматического регулирования и управления. Москва, Наука, 1989. 304 с.
[22] Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. Москва, Наука, 1988. 256 с.
[23] ГОСТ Р 55231–2012. Системы автоматического регулирования частоты вращения (САРЧ) судовых, тепловозных и промышленных двигателей внутреннего сгорания. Общие технические условия. Москва, Изд-во Стандартов, 2012. 14 с.
[24] Системы управления дизельными двигателями. Москва, Изд-во «За рулем», 2004. 480 с.
[25] Системы управления бензиновыми двигателями. Москва, Изд-во «За рулем», 2005. 432 с.
[26] Александров А.А., Иващенко Н.А., ред. Машиностроение. Энциклопедия. Том IV. Двигатели внутреннего сгорания. Москва, Машиностроение, 2013. 784 с.
[27] Грехов Л.В., Иващенко Н.А., Марков В.А. Системы топливоподачи и управления дизелей. Москва, Легион-Автодата, 2005. 344 с.
[28] Пинский Ф.И., Давтян Р.И., Черняк Б.Я. Микропроцессорные системы управления автомобильными двигателями внутреннего сгорания. Москва, Изд-во «Легион-Автодата», 2001. 136 с.
[29] Крутов В.И. Автоматическое регулирование и управление двигателей внутреннего сгорания. Москва, Машиностроение, 1989. 416 с.
[30] Марков В.А., Фурман В.В., Бебенин Е.В. Совершенствование системы регулирования частоты вращения дизельного и газодизельного двигателей. Автогазозаправочный комплекс + альтернативное топливо, 2016, № 4, с. 12–29.
[31] Денисенко В.В. ПИД-регуляторы: принципы построения и модификации. Современные технологии автоматизации. Ч. 1, 2006, № 4, с. 66–74.
[32] Денисенко В.В. ПИД-регуляторы: принципы построения и модификации. Современные технологии автоматизации. Ч. 2, 2007, № 1, с. 90–98.
[33] Денисенко В.В. ПИД-регуляторы: вопросы реализации. Современные технологии автоматизации, 2007, № 4, с. 86–97.
[34] Кутрубас В.А., Сычева Е.Е. Эффективный ПИД-регулятор. Промышленные АСУ и контроллеры, 2013, № 5, с. 60–65.
[35] Марков В.А., Поздняков Е.Ф., Шленов М.И. Система автоматического регулирования частоты вращения коленчатого вала дизеля. Автомобильная промышленность, 2007, № 10, с. 12–14.
[36] Боковиков А.Н., Кузнецов А.Г. Результаты полунатурного моделирования режимов работы автомобильного дизеля. Грузовик, 2009, № 12, с. 15–17.
[37] Хрящев Ю.Е., Тихомиров М.В., Епанешников Д.А. Алгоритмы управления двигателями внутреннего сгорания. Якутск, Изд-во ЯГТУ, 2014. 204 с.
[38] Пупков К.А., Егупов Н.Д., ред. Методы классической и современной теории автоматического управления. В 5 т. Т. 1. Математические модели, динамические характеристики и анализ систем автоматического управления. Москва, Изд-во МГТУ им. Н.Э. Баумана, 2004. 656 с.
[39] Пупков К.А., Егупов Н.Д., ред. Методы классической и современной теории автоматического управления. В 5 т. Т. 5. Методы современной теории автоматического управления. Москва, Изд-во МГТУ им. Н.Э. Баумана, 2004. 784 с.
[40] Шегал А.А. Применение программного комплекса Multisim для проектирования устройств на микроконтроллерах: лабораторный практикум. Екатеринбург, Изд-во УФУ, 2014. 118 с.
[41] Бесперстов Э.А. Исследование логических схем с использованием программного комплекса Multisim: лабораторный практикум. Санкт-Петербург, Изд-во БГТУ, 2006. 64 с.
[42] Поздняков Е.Ф. Анализ эффективности использования регулятора частоты вращения с последовательно включенными корректирующими звеньями в дизельном двигателе дизель-генераторной установки. Дис. … канд. техн. наук. Москва, МГТУ им. Н.Э. Баумана, 2009. 150 с.
[43] Боковиков А.Н. Использование турбокомпрессора с турбиной изменяемой геометрии для повышения экологических и экономических показателей дизеля. Дис. … канд. техн. наук. Москва, МГТУ им. Н.Э. Баумана, 2011. 171 с.
[44] Попов Е.П. Теория линейных систем автоматического регулирования и управления. Москва, Наука, 1989. 304 с.
[45] Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. Москва, Наука, 1988. 256 с.
[46] ГОСТ Р 55231–2012. Системы автоматического регулирования частоты вращения (САРЧ) судовых, тепловозных и промышленных двигателей внутреннего сгорания. Общие технические условия. Москва, Изд-во Стандартов, 2012. 14 с.
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ
1. Система автоматического регулирования числа оборотов двигателя внутреннего сгорания (ДВС), включающая электронный блок управления, дроссельную заслонку с приводом, датчик температуры, датчик числа оборотов ДВС, датчик положения дроссельной заслонки, отличающаяся тем, что в качестве привода дроссельной заслонки используется двигатель постоянного тока с редуктором, а в качестве электронного блока управления используется микроконтроллерная универсальная плата. 2. Система по п.1, отличающаяся тем, что микроконтроллерная универсальная плата включает микроконтроллер, преобразователь сигнала положения коленчатого вала, индикаторную светодиодную линейку, стабилизатор источника питания, кварцевый резонатор, резистивные и емкостные элементы.
fipi|I|ji||||||||p||||j||f|||F02D 41/00, F02M 51/00
Система автоматического регулироваиия числа оборотов двигателя
Полезная модель относится к области машиностроения, в частности к системам автоматического регулирования числа оборотов двигателя внутреннего сгорания (ДВС).
Из известных систем автоматического регулирования числа оборотов (САРЧО) ДВС наиболее близкой но совокупности существенных признаков является САРЧО, содержапдая электронный блок управления, дроссельнзоо заслонку с приводом, датчик температуры, датчик числа оборотов ДВС, датчик положения дроссельной заслонки (см. патент РФ 2027050, кл.Р02О 41/00, 1995).
Недостаток известной САРЧО ДВС связан с тем, что угловое положение дроссельной заслонки задается не автоматически в зависимости от режима работы ДВС, а механически педалью акселератора, что не позволяет точно дозировать подачу топлива.
Задачей полезной модели является создание САРЧО, обеспечивающей автоматическое регулирование положения дроссельной заслонки и оптимальную подачу топлива в ДВС.
Указанный технический результат достигается тем, что САРЧО в качестве привода дроссельной заслонки использует двигатель постоянного тока (ДПТ) с редуктором, а в качестве электронного блока управления использует микроконтроллерная универсальная плата. Использование в
качестве привода заслонки ДПТ с редуктором позволяет автоматически регулировать положение заслонки в зависимости от режима работы ДВС, обеспечивая при этом оптимальную подачу топлива и минимальный выброс вредных примесей.
Целесообразно, чтобы микроконтроллерная универсальная плата включала микроконтроллер, преобразователь сигнала положения коленчатого вала, индикаторную светодиодную линейку, стабилизатор источника питания, кварцевый резонатор, резистивные и емкостные элементы. Микроконтроллерная плата обеспечивает реализацию алгоритмов управления дроссельной заслонкой.
Проведенный анализ уровня техники показал, что заявленная совокупность существенных признаков, изложенная в формуле полезной модели, неизвестна. Это позволяет сделать вывод о ее соответствии критерию новизна.
Сущность полезной модели поясняется чертежом и описанием работы САРЧО.
На рис. 1 представлена блок схема САРЧО.
САРЧО включает блок управления (БУ) 1, дроссельную заслонку (ДЗ) 2, привод ДЗ 3, датчик температуры ДВС 4, датчик положения ДЗ 5, датчик числа оборотов ДВС 6.
САРЧО работает следующим образом. После подачи питания на БУ 1 осуществляется инициализация микроконтроллера и тестирование узлов БУ. В соответствие с алгоритмом работы БУ осуществляется
проверка нахождения ДЗ в начальном положении и при необходимости
закрытие ДЗ. После пуска ДВС БУ анализирует число оборотов ДВС. Затем БУ непрерывно контролирует температуру ДВС и при достижении температуры значения и переходит к алгоритму поддержания числа оборотов ДВС в заданных пределах. В процессе работы БУ получает сигналы от датчиков температуры, положения ДЗ, числа оборотов ДВС. На основании полученных сигналов и алгоритма управления БУ вырабатывает сигнал на управление приводом ДЗ.
Приведенное выше описание конструкции и работы заявляемой САРЧО показывает, что данная САРЧО может быть реализована на практике с достижением заявленного технического результата. Следовательно, заявленная полезная модель соответствует критерию промышленная применимость.