Синхронные двигатели
7.13. Синхронные двигатели
Ранее в п. 7.8 при рассмотрении параллельной работы синхронной машины с сетью установлена возможность перевода ее из генераторного в двигательный режим при изменении знака угла θ между векторами ЭДС Е 0 и напряжения U.
Синхронная машина, работающая параллельно с сетью, автоматически переходит из генераторного в двигательный режим, если к валу ротора приложить тормозной момент. При этом машина потребляет из сети активную мощность и возникает электромагнитный вращающий момент. Частота вращения ротора остается неизменной, жестко связанной с частотой сети,

7. Синхронные машины
В генераторном режиме синхронная машина преобразовывала механическую мощность, получаемую от первичного двигателя, в электрическую мощность, отдаваемую в первичную сеть, соединенную с обмоткой статора. В двигательном режиме синхронная машина преобразовывает электрическую энергию, получаемую из первичной сети, в механическую мощность, потребляемую рабочей машиной, соединенной с валом синхронной машины, сохраняя в обоих случаях синхронную частоту вращения, определяемую частотой сети. Предельная мощность, при которой может работать двигатель без выпадения из синхронизма, определяется, как и для генератора, предельной перегрузочной способностью.
Активная электрическая мощность, потребляемая двигателем из сети, определяется как
Ρ 1 = mU I сos ϕ ,
где U и I – фазные напряжение и ток якоря; cos φ – коэффициент мощности. Часть этой мощности затрачивается на покрытие электрических по-
терь р э в обмотке якоря и магнитных потерь р мг в магнитопроводе якоря, а остальная часть составляет электромагнитную мощность, передаваемую со статора через зазор вращающимся магнитным полем на ротор, в виде полной механической мощности
Ρ = Р мх = Ρ 1 − p э − р м .
Часть механической мощности компенсирует механические р мх и добавочные р д потери мощности и полезная механическая мощность на валу двигателя
Ρ 2 = Ρ мх − р д − р мх .
Если возбудитель находится на одном валу с двигателем или возбуждение машины осуществляется статическими системами возбуждения, то полезная мощность на валу агрегата двигатель–возбудитель уменьшается на величину мощности р f , потребляемой возбудителем.
Подставляя выражение (7.131) электромагнитной мощности в формулу (7.132), получим
где Σ р = р f + р э + р м + р мх + р д − полные потери мощности в машине, причина возникновения и место локализации отдельных видов потерь объясняется в п. 7.6.
![]()
![]()
7. Синхронные машины
P m 

P H 


 –P н
–P н

 – P m
– P m
Рис. 7.38. Угловая характеристика активной мощности двигательного и генераторного режимов синхронной машины
Электромагнитный момент двигателя
где Ω c = 2π n – синхронная угловая скорость вращения ротора.
Как показано в п. 7.7, переход машины из режима генератора в двигательный режим вызывается изменением знака угла θ между векторами ЭДС Е 0 и напряжения U с . Следовательно, выражения для мощности и момента двигательного режима можно получить из соответствующих выражений для генератора, подставляя в них отрицательные значения угла θ (рис. 7.38) . Изменение знака мощности указывает на изменение направления потока энергии и на соответствующее изменение режима.
Уравнения напряжения синхронных двигателей получают, заменив в уравнениях напряжения генератора (7.40), (7.45) вектор напряжения машины U равным и противоположно направленным вектором напряжения сети U C = – U , от которой работает двигатель (термин «напряжение двигателя» обычно не употребляется). При такой замене уравнения напряжения для неявнополюсного и явнополюсного двигателей:
U с = − E 0 − jx с I − r I ,
U с = − E 0 − jx σ I − jx ad I d − jx aq I q − r I .

7. Синхронные машины
Построение векторных диаграмм проводят аналогично векторным диаграммам генератора, с учетом особенностей уравнений напряжения (7.136) или (7.137). При этом коэффициент мощности в двигательном режиме характеризуют углом φ между векторами напряжения сети U C и тока якоря İ .
Аналогично генераторному режиму для двигателя можно построить U- образные характеристики I = f ( I f ), которые имеют такую же форму, как
и аналогичные характеристики генератора, поскольку направление реактивной мощности в синхронной машине при постоянном угле нагрузки θ
не зависит от его знака, а определяется величиной тока возбуждения I f . Физические процессы, связанные только с изменением I f , одинаковы в двигателях
и генераторах. При недовозбуждении ток I a отстает от напряжения сети – двигатель потребляет из сети реактивную мощность, а при перевозбужде-
нии ток опережает напряжение сети U с двигатель отдает в сеть реактивную мощность. Способность компенсировать недостающую реактивную мощность в сети – одно из главных достоинств синхронных двигателей. Различие U- образных характеристик генератора и двигателя наблюдается лишь в режиме холостого хода (на рис. 7.34) штриховая линия соответствует U- образной характеристике двигателя при холостом ходе). При холостом ходе генератора при полезной электрической мощности Р 2 = 0 и нормальном токе возбуждения I f тока в обмотке якоря нет, поскольку все потери холостого хода компенсируются механической мощностью, подводимой
к валу от приводного двигателя или турбины (рис. 7.19).
В двигателе потери холостого хода компенсируются, как следует из (7.133), потребляемой из сети электрической мощностью
Р хх = ∑ р хх = р f + p м + p мх + р эл.хх .
Даже при отсутствии нагрузки на валу ( P 2 = 0) в обмотке якоря есть ток, равный току холостого хода I xx . При нормальном возбуждении ток I xx чисто активный и не превышает (0,01–0,1) I н .
Синхронные двигатели рассчитывают для работы в режимах перевозбуждения с опережающим номинальным коэффициентом мощности
cosφ н , в большинстве случаев равным 0,9. При этом статическая перегружаемость двигателей k п = Р m / Р н должна быть не менее 1,65.
Вследствие постоянства скорости вращения ротора кратность максимального момента синхронных двигателей k m = М m / М н = k п .
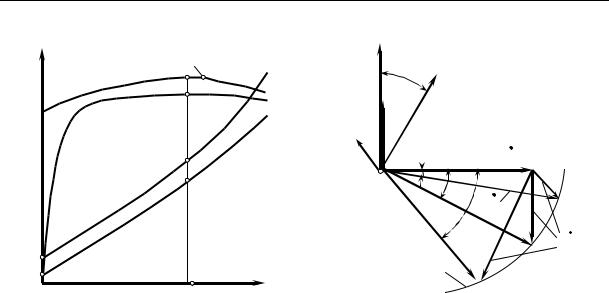
Рабочие характеристики синхронного двигателя – это зависимости потребляемой мощности, тока, коэффициентов мощности и полезного действия от полезной мощности Р 1 , I , cos φ, η = f ( P 2 ) при U = const, f = const
и I f = const (рис. 7.39).
7. Синхронные машины
Рис. 7.40 . К объяснению изменения
Рис. 7.39. Рабочие характеристики
cos φ при различных нагрузках
Поскольку частота вращения двигателя постоянна, не изменяется при изменении полезной мощности двигателя, зависимость n = f ( P 2 ) обычно не приводится. Не приводится также и зависимость M = f ( P 2 ), так как вращающий момент M пропорционален P 2 . Кривая зависимости η = f ( P 2 ) имеет характер, общий для всех электрических машин.
Отрезки, отсекаемые на оси ординат кривыми I = f ( P 2 ) и Р 1 = f ( Р 2 ), соответствуют расходам тока и мощности на покрытие потерь холостого хода.
С увеличением Р 2 потребляемая активная мощность Р 1 сначала растет практически линейно. В дальнейшем зависимость Р 1 = f ( Р 2 ) отклоняется от линейной вследствие более быстрого по сравнению с Р 2 роста электрических потерь в обмотке якоря, пропорциональных I 2 или Р 2 2 , и снижения в связи с этим КПД.
Причину изменения cos φ при изменении нагрузки объясняет рис. 7.40. Если пренебречь падениями напряжения на активном и индуктивном сопротивлениях обмотки якоря, то U c = – E = const, а следовательно, МДС F r = const и, значит, положение векторов U c , F r , E не меняется при изменении полезной нагрузки.
Отрегулируем ток возбуждения так, чтобы при нагрузке машины номинальным током I н коэффициент мощности будет равен единице. При уменьшении мощности на валу уменьшится и МДС F a . Треугольник МДС,
как следует из равенства F r = F f + F a = const, всегда замкнут. Это возможно только в том случае, когда, наряду с изменением своей величины, вектор МДС якоря F а изменит и направление вследствие сдвига между векто-

7. Синхронные машины
рами тока двигателя и напряжения сети. При возрастании угла φ коэффициент мощности снижается.
Синхронные двигатели могут работать при cos φ = 1, но обычно их рассчитывают на работу при номинальной нагрузке с опережающим током и cos φ = 0,9–0,8. В этом случае улучшается суммарный коэффициент мощности сети, от которой питаются синхронные двигатели, так как создаваемая им опережающая реактивная составляющая тока I a компенсирует отстающую реактивную составляющую тока асинхронных двигателей. Зависимость cos φ = f ( P 2 ) при работе машин с перевозбуждением имеет максимум в области P 2 > P н . При снижении P 2 значение сos ϕ уменьшается,
а отдаваемая в сеть реактивная мощность возрастает.
Пуск синхронного двигателя. Без учета действия вихревых токов в массивных деталях ротора и его специальных обмоток нельзя допустить возможность самостоятельного развертывания двигателей до синхронизма при включении обмотки статора в сеть промышленной частоты. Инертность роторных масс исключит возможность ротору почти мгновенно (за полпериода изменения тока) достичь высокой частоты вращающегося поля статора, и он останется неподвижным. Поэтому для включения в работу синхронных двигателей пользуются частотным пуском, пуском от вспомогательного двигателя и асинхронным пуском.
Частотный пуск осуществляется путем включения двигателя на устройство (индивидуальный генератор, частотный преобразователь), позволяющее плавно поднимать частоту тока от возможного минимума до номинальной. Для обеспечения максимального пускового момента устанавливают на генераторе (частотном преобразователе) токи возбуждения номинальный I f н у генератора и I f х , обеспечивающий E f = U н при холостом ходе, у двигателя. При малой частоте f изменения напряжения генератора ток якоря двигателя образует вращающееся с малой скоростью магнитное поле. Возбужденный ротор двигателя втягивается в синхронизм при частоте f = (3 – 8) Гц. Постепенно увеличивают частоту f до номинальной, ротор двигателя за счет синхронного момента разворачивается синхронно с полем статора до номинальной частоты вращения, при этом напряжение U изменяют пропорционально f .
Высокая стоимость – основной недостаток этого способа пуска. Поэтому частотный пуск оправдан в случае не только пуска, но и частотного регулирования скорости вращения двигателя. С понижением стоимости частотных преобразователей способ приобретает серьезное практическое значение.
Пуск от вспомогательного двигателя заключается в том, что синхронный двигатель разгоняют до скорости выше синхронной вспомогательным двигателем (например, асинхронным), после чего вспомогатель-
7. Синхронные машины
ный двигатель отключают от питающей сети. Ротор синхронного двигателя, постепенно замедляясь, неизбежно проходит через момент синхронной скорости, который может быть уловлен синхроноскопом. В момент совпадения скоростей обмотка якоря включается в сеть, и двигатель продолжает вращаться самостоятельно. Этот способ применим для пуска сравнительно небольших по мощности машин, включаемых в работу практически без нагрузки. При пуске нагруженных двигателей с нагрузкой, близкой к номинальной, мощности вспомогательного двигателя и основного требуются соизмеримыми и способ становится экономически невыгодным.
Асинхронный пуск – наиболее распространенный вид пуска. Синхронный двигатель пускают как асинхронный, для чего в наконечники полюсов ротора устанавливают короткозамкнутую обмотку, выполненную по типу «беличьей клетки». При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле, которое, взаимодействуя с током I п в пусковой обмотке, создает электромагнитный момент, приводящий ротор во вращение и обеспечивающий его разгон до скорости, близкой к синхронной. Если при этой подсинхронной скорости в обмотку полюсов ротора дать постоянный ток, то взаимодействием потоков ротор окажется втянутым в синхронизм (чаще всего покачавшись вокруг некоторого равновесного положения).
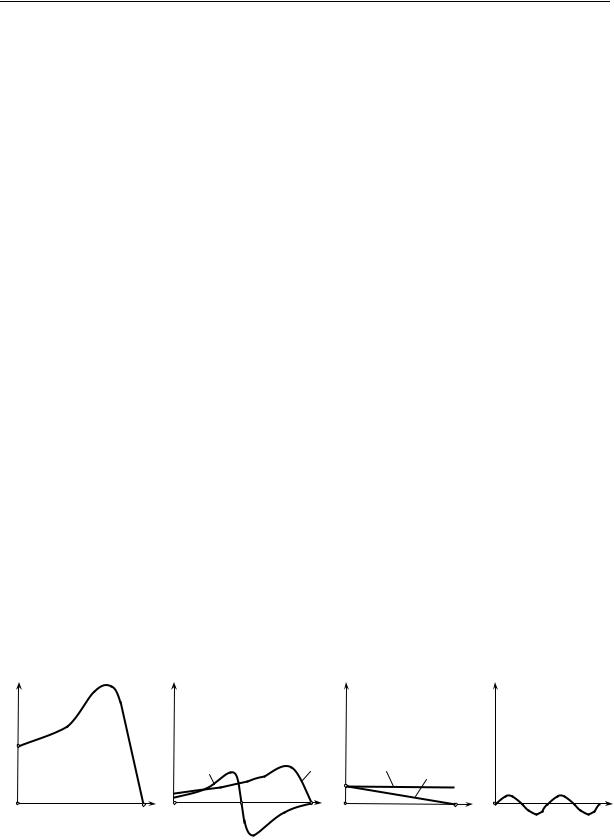
В процессе асинхронного пуска на ротор машины действуют несколько электромагнитных моментов:
• асинхронный момент от пусковой обмотки М а с (рис. 7.41, а );
• моменты от обмотки возбуждения М пр и М об (рис. 7.41, б );
• моменты от вихревых токов в массиве ротора М вх и гистерезисный
• реактивный (в явнополюсных машинах) М р , меняющий свой знак
дважды за один оборот поля статора (рис. 7.41, г ).
Крутящий момент редукторов
Крутящий момент редуктора является одним из важнейших параметров устройства. Именно этот показатель позволяет увеличить характеристики принимающего устройства и достичь нужной мощности. Разберемся, как меняется значение в зависимости от вида механизма и как правильно рассчитать требуемые параметры.
Крутящий момент с учетом вида редуктора
 Любой редуктор снижает обороты, передаваемые на вал, в определенное количество раз. Именно этот показатель определяется как передаточное число. Но не менее важным является вращающий момент на выходном валу, который показывает величину, обеспечивающую безопасную передачу мощности.
Любой редуктор снижает обороты, передаваемые на вал, в определенное количество раз. Именно этот показатель определяется как передаточное число. Но не менее важным является вращающий момент на выходном валу, который показывает величину, обеспечивающую безопасную передачу мощности.
Допустимые значения определяются различными факторами. Например, в устройствах одного типоразмера цифра зависит от разности диаметров. В червячных моделях радиус колеса и червяка почти всегда неизменны, поэтому сила воздействия создается за счет количества зубьев.
По типу передачи различают следующие разновидности редукторов:
- цилиндрические (одноступенчатые и многоступенчатые);
- конические;
- червячные;
- планетарные.
Все перечисленные разновидности относятся к числу однотипных. Однако кроме них существуют и комбинированные механизмы, в которых вращение передается между двумя валами, перекрещивающимися или пересекающимися между собой.
Как правило, более высокий номинальный крутящий момент у редукторов планетарного типа. Цилиндрические механизмы, которые востребованы в промышленности, также передают повышенные мощности. Простые по конструкции червячные устройства имеют более низкий КПД, что связано с большими потерями на трение. Последняя разновидность – конические устройства – имеют достаточно плавное зацепление и передают большую мощность под углом 90 градусов.
Еще один показатель, который может повлиять на вращающий момент, – это количество ступеней. Для повышения передаваемой мощности число ступеней может увеличиваться. В цилиндрических редукторах для увеличения показателя применяются шестерни разных диаметров. В червячных устройствах на шестерне изменяется количество зубцов.
Расчет крутящего момента редуктора являются одной из наиболее сложных процедур для выбора механизма. Этот показатель косвенно отражает способность привода выдержать определенные нагрузки. Ошибки при определении величины могут привести к преждевременному выходу оборудования из строя. Также возможны и менее критичные проблемы вроде постоянного перегрева и сложностей с установкой. Поэтому перед выбором механизма необходим тщательный анализ имеющихся факторов и применение специальной формулы.
Формула расчета
 Основная проблема, с которой можно столкнуться, заключается в том, как рассчитать крутящий момент редуктора. Начнем с того, что такой параметр измеряется в Ньютон-метрах. То есть, если к выходному валу прикрепить штангу длиной около 1 метра, то привод должен будет поддерживать работоспособность, равную 1 Ньютону. Если нагрузка прикладывается ближе к оси выходного вала, то показатель должен быть больше.
Основная проблема, с которой можно столкнуться, заключается в том, как рассчитать крутящий момент редуктора. Начнем с того, что такой параметр измеряется в Ньютон-метрах. То есть, если к выходному валу прикрепить штангу длиной около 1 метра, то привод должен будет поддерживать работоспособность, равную 1 Ньютону. Если нагрузка прикладывается ближе к оси выходного вала, то показатель должен быть больше.
Стоит отметить, что различают несколько видов вращающего момента:
M2 – показатель на выходном валу.
Mn2 – номинальный показатель, характеризующий ту мощность, которую может передавать механизм.
Mr2 – требуемый момент, которые обычно равняется номинальному.
M2max – максимальный показатель, который передается в момент ускорения.
Mc2 – расчетная мощность, которая рассчитывается с учетом необходимого и номинального момента, а также сервис-фактора (Sf).
Для расчета максимально возможного крутящего момента используется формула следующего типа:
Р – мощность двигателя (измеряется в кВт);
N – показатель КПД (в среднем составляет от 0,94 до 0,98);
U – передаточное число;
nвх – обороты входного вала (за 1 минуту);
К – коэффициент, который определяется с учетом режима использования редуктора.
При расчетах важно учесть, что получаемый показатель не должен быть больше того, что указывается в технических параметрах механизма.
Что касается крутящего момента, определяемого на выходе редуктора (M2), то этот показатель можно получить, умножив номинальный параметр (Mn2) на передаточное число устройства.
Надеемся, что вы разобрались с правилами определения вращающего момента редуктора и сможете самостоятельно рассчитать этот показатель. А если у вас возникнут сложности, то специалисты нашей компании «Ф и Ф» обязательно помогут выбрать механизм с учетом имеющихся потребностей!
Нужна ли сервосистема или нет?
Вы действительно нуждаетесь в сервосистеме? Возможно асинхронный двигатель с устройством обратной cвязи может предложить более эффективное решение для специфических задач? Пристальный взгляд на описание и рабочие характеристики серво и асинхронных двигателей может заставить задуматься.
Сервопривод – это не только двигатель. Это система управления движением с замкнутый контуром, состоящая из контроллера, привода, двигателя и устройства обратной связи, обычно оптического или магнитного инкодера. Замешательство начинается, когда производитель моторов начинает продвигать серводвигатель.
“Двигатель сервосистемы”- синхронная машина с постоянными магнитами (ПМ), представленная щеточным или бесщеточным двигателем с ПМ. Они имеет определенные рабочие характеристики, выделяющие его среди других типов моторов. Синхронный двигатель с постоянным магнитом имеет очень высокий пиковый и непрерывный вращающий моменты, и используется для приведения в движение сервосистемы с высоким ускорением и замедлением в устройствах высокоточного позиционирования. Вращающий момент прямо пропорционален току на входе. Скорость вращения вала электродвигателя напрямую зависит от входного напряжения. Чем выше входное напряжение, тем выше скорость двигателя. Функция вращающий момент-скорость линейна Система постоянных магнитов непосредственно примыкает к воздушному зазору двигателя. В бесщеточной конфигураций двигателя с ПМ, две взаимодействующие магнитные системы, вращающийся ротор (с соединенными постоянными магнитами) и неподвижная обмотка статора, взаимодействуя, создают момент двигателя и вращение. Трехфазное поле статора запитывается последовательно, и ротор с ПМ синхронно следует за вращающимся полем статора Специальное электронное коммутирующее устройство используется для определения положения ротора, и запитки обмоток статора. Бесщеточный двигатель с ПМ имеет ряд преимуществ перед любым другим типом двигателя для систем точного позиционирования, за исключением большинства задач для автомобильной промышленности и систем использующих очень большие двигатели. Бесщеточный двигатель с ПМ является только двигателем сервосистемы в случае использования в системах с обратной связью по моменту, скорости или положению. Асинхронный двигатель имеет аналогичный бесщеточному двигателю статор, и абсолютно другую конструкцию ротора. Ротор асинхронного двигателя с беличьей клеткой состоит из ряда проводящих алюминиевых или медных шин, уложенных в пазы ротора и соединенных накоротко кольцом. Эти короткозамкнутые стержни ротора магнитно взаимодействуют с вращающимся полем статора и индуцируют поле ротора, которое взаимодействует с полем статора, вращая ротор. Существует небольшая разность между синхронным полем статора, медленным полем ротора и фактической скоростью ротора. Эта разность скоростей называется скольжением. Частота тока на входе определяет скорость вращения двигателя. Например, на 60 гц, в зависимости от значения скольжения, двухполюсный двигателя переменного тока без нагрузки вращается с частотой 3600 оборотов в минуту, а четырехполюсный двигателей переменного тока, 1800 оборотов в минуту. С ростом момента на валу, скольжение увеличивается и скорость падает. Асинхронный двигатель переменного тока развивает больший вращающий момента за счет уменьшения скорости, пока нагрузка не приближается к точке пробоя, когда скорость двигателя внезапно понижается до ноля. Особенность работы двигателя переменного тока -небольшой вращающий момент при запуске, поэтому при старте двигателя необходимо снимать нагрузку. Вызванные такой зависимостью момент-скорость ограничения были преодолены созданием в 80-х годах прошлого века инверторного электронного привода. Способность инвертора менять и напряжение и частоту, используя приводы с регулируемой или переменной скоростью, изменила форму кривой момент-скорость, позволив асинхронным двигателей переменного тока стать лидерами при решения задач быстродействия.
Системы управления скоростью и позиционирования сегодня: продолжающееся развитие высокоэффективных приводов привело к тому, что бесщеточный и асинхронный двигатель переменного тока на равных конкурируют в различных областях , однако бесщеточный двигатель продолжает доминировать в системах высокоточного позиционирования. Бесщеточные двигатели с ПМ успешно конкурируют заводских условиях с щеточными двигателями постоянного тока при решении задач регулирования частоты вращения для нагрузок от 1 киловатта (1.37 л.с) и меньше. Как выбрать: асинхронные двигатели переменного тока теперь создаются не только для решений гарантирующих низкую инерционностью и быструю ответную реакцию по ускорением. Они лидируют в большинстве приложений с нагрузкой от 100 ватт до 1 мегаватта. Используйте бесщеточный двигатель с ПМ в сервосистемах позиционирования для нагрузок не более 50 киловатт (67 л.с.). Машины с магнитной индукцией- для систем с постоянной или переменной скоростью. Совместное использование встречается достаточно редко. Двигатели других типов продолжают подавать надежды, но пока без успеха аналогичного всеми признанному асинхронному двигателю переменного тока или многообещающему бесщеточному двигателю с постоянными магнитами.
Механические характеристики синхронных электромашин при пуске

Устройство синхронного электродвигателя таково, что он развивает вращающий момент только при условии вращения его ротора синхронно с магнитным полем статора. Для обеспечения разгона синхронного электродвигателя его ротор снабжают специальной короткозамкнутой пусковой обмоткой.
В пазы полюсных наконечников укладывают стержни пусковой обмотки и замыкают ее накоротко короткозамыкающими кольцами. При этом при подключении статорной обмотки синхронной электрической машины в сеть она будет запускаться как обычный асинхронный электродвигатель с КЗ ротором. Пусковой момент будет создаваться взаимодействием магнитных потоков статора и короткозамкнутого ротора и, соответственно, электродвигатель будет разгонятся. Когда скорость ротора достигнет «подсинхронной», а это 95% — 98% синхронной, на обмотку возбуждения подают постоянный ток (ток возбуждения), после чего двигатель втягивается в синхронизм. Механическая характеристика синхронной машины при пуске будет иметь две характерные точки:
- Пусковой момент Мпуск, который двигатель может развить при неподвижном состоянии (S = 1);
- Входной или подсинхронный момент Мвх, который развивает синхронный электродвигатель при 95% синхронной скорости (S ≈ 0.05).
В зависимости от назначения, а также условий работы электропривода, требуются различные соотношения между данными моментами и различные их величины.
Чем больше будет сопротивление пусковой обмотки, тем будет больше критическое скольжение, которое влияет на максимум момента. Соответственно поменяется и величина пускового момента при S = 1, а также подсинхронного S = 0,05; величина последнего довольно существенна при вхождении в синхронизм. Чем будет больше подсинхронный момент, тем больше будет скорость, к которой сможет разогнаться синхронный электродвигатель а режиме асинхронного и, соответственно, ему будет легче втянутся в синхронизм. Механическая характеристика для асинхронного режима показана ниже:

Из данной фигуры мы можем увидеть, что увеличивая подсинхронный момент мы уменьшаем пусковой, и наоборот. Поэтому выбирая синхронный электродвигатель для конкретного механизма необходимо всегда согласовать пусковые характеристики электродвигателя и рабочего механизма Мс = φ(n).
При асинхронном пуске ток статора будет больше номинального в несколько раз Iпуск = 3÷5Iном. Чтоб снизить этот ток понижают напряжение на обмотках статора. Для этого используют пусковые реакторы или автотрансформаторы. При этом величина пускового тока будет снижена пропорционально напряжению на статоре, но при этом снизится пусковой и критический моменты пропорционально квадрату напряжения. Благодаря развитию современных технологий используют для пуска преобразователи частоты, но этот вид пуска мы рассмотрим в отдельной статье.
Также пусковые характеристики будут во многом зависеть от перегрузочной способности синхронной машины в нормальном режиме. Перегрузочная способность возрастет с увеличением воздушного зазора, однако такое увеличение приведет к увеличению потока рассеивания, что в свою очередь приведет к уменьшению моментов при асинхронном пуске. В связи с такой противоречивостью условий пуска и перегрузочной способности приходится принимать некоторые средние параметры, при которых характеристики двигателя в наибольшей степени отвечают всем поставленным требованиям.
В процессе пуска также непосредственное участие принимает и обмотка ротора. В начальной стадии пуска в ней индуктируется довольно значительная ЭДС, которая может привести к пробою изоляции (если оставить ее в разомкнутом виде). Поэтому обмотку ротора замыкают на активное сопротивление в 10 – 12 раз больше чем сопротивление самой обмотки. Замыкание роторной обмотки в процессе пуска накоротко не рекомендуется, так как из-за явления одноосного включения возможно значительное уменьшения пускового момента при половине синхронной скорости. Это может привести к устойчивой работе электродвигателя при пониженной скорости.
Физически данное явление можно объяснить так. Вращающееся поле статора будет индуктировать в обмотке ротора ЭДС частоты скольжения f2 = f1S. Данная ЭДС инициирует появления тока, который создаст пульсирующую МДС. Эту МДС, в свою очередь, можно разложить на две составляющие F1 и F2, которые вращаются относительно ротора в разные стороны, но с одинаковыми скоростями n2 = ±(n — n). То есть получается аналогичная картина режиму с введением в цепь ротора асинхронной машины несимметричных сопротивлений.
МДС F1 относительно статора будет вращаться со скоростью:

Данная МДС будет создавать дополнительный вращающий момент, который будет суммироваться с вращающим моментом от пусковой обмотки.
МДС F2 создаст обратно-синхронное поле, которое вращается со скоростью относительно статора:

При этом в статоре будет индуктироваться ЭДС частоты:

Данная ЭДС обусловит токи в статоре, которые замыкаясь через сеть будут взаимодействовать с обратно-синхронным полем ротора и создавать дополнительный момент, величина которого зависит от скорости вращения синхронной машины. При n = 0.5n частота тока в статоре f3 = 0 и дополнительный момент тоже будет равен нулю. При n 0.5n поток, создаваемый МДС F2 ротора, будет вращаться согласно с ротором, и вращающий момент будет отрицательным, то есть тормозным:

Просуммировав кривую 3, создаваемую МДС F2, с моментами создаваемыми МДС пусковой обмотки 1 и МДС F1 обмотки 2, получим результирующую механическую характеристику в пусковом режиме синхронного электродвигателя 4. Провал в характеристике 4 при скорости, близкой к 0,5n, может стать причиной «застревания» синхронного электродвигателя на промежуточной скорости. Данное явления может реализоваться в случае если Мс>Ммин.
Влияние одноосного включения можно убрать путем включения в цепь обмотки возбуждения на время пуска добавочного сопротивления. При этом максимум момента от МДС F1 сместится в сторону большего скольжения, а момент от МДС F2 уменьшится по величине.
Пусковая характеристика синхронного электродвигателя (показанная выше) построена при упрощенном рассмотрении явлений. В действительности при пуске синхронного электродвигателя играют роль еще и моменты от вихревых токов в полюсных наконечниках, реактивный и гистерезисный моменты. Явнополюсное строение ротора изменяет его магнитное сопротивление в зависимости от его положения. Отсутствие стержней пусковой обмотки в междуполюсном пространстве приводит к несимметричности обмотки. Оба эти явления способствуют появлению пульсаций момента и, следовательно, периодических изменений скольжения. Точный учет всех факторов и получения максимально приближенной к реальной математической модели пусковой характеристики весьма сложная задача. При практических расчетах следует пользоваться пусковыми характеристиками приводимыми в каталогах.