
Что является нагрузкой для двигателя
Запчасти
- Запасные части для бензиновых двигателей
- Двигатели HONDA
- Двигатели Kipor
- Двигатели LIFAN
- Двигатели Robin-Subaru
- Двигатели ТСС
- Запасные части для портативных электростанций
- Бензиновые портативные электростанции
- Запасные части для генераторов
- Запчасти для генераторов Mecc Alte
- Запчасти для генераторов TSS
- Запчасти для генераторов Leroy Somer
- Запасные части для дизельных двигателей малой механизации
- Запасные части для теплового оборудования
- Газовые пушки ТСС
- Тепловые пушки ITM ANTARES
- Тепловые пушки ITM MIZAR
- Запасные части для двигателей серии Lester; Mitsudiesel

Дизельные электростанции, для обеспечения надёжной и продолжительной работы, нуждаются в комплексе мероприятий, направленных на интеграцию в электросистему обеспечения потребителей заказчика. В числе мероприятий – настройка систем управления дизельной электростанции для полного соответствия потребностям потребителей и тестирование в рабочем режиме. По отработанной технологии, комплекс пусконаладочных мероприятий является завершающим этапом, которому предстоят проектирование, поставка, монтажные работы и подключение электросетей.
В эксплуатации дизельных электростанций в режиме резервного источника электропитания или при неполной нагрузке есть своя специфика, пренебрегать которой настоятельно не рекомендуется. Испытание дизель генератора под нагрузкой является дополнительным мероприятием, которое рекомендуется обязательно проводить при прохождении очередного технического обслуживания или в качестве отдельной процедуры. Суть процесса заключается в подключении к дизельной электростанции нагрузки, достаточной для вывода установки на режим, способствующий очистке системы вывода отработанных газов и двигателя от конденсата и нагара. Испытание ДГУ под нагрузкой, также, позволяет избежать закоксованности двигателя.
Телефоны
Электронная почта
Адрес
Рабочее время
Стоимость испытания дизельной электростанции под эквивалентной нагрузкой (1 час)
- Утилизация отработанных элементов (фильтры) и технических жидкостей(ГСМ).Цены на обслуживание ДГУ указаны в рублях, с НДС — 20%Цены на техническое обслуживание дизельных электрогенераторов включает все необходимые расходные материалы и эксплуатационные жидкости.
В стоимость входит выезд бригады инженеров по Москве и МО.Цены являются ориентировочными и могут меняться в зависимости от производителя оборудования.Цены на техническое обслуживание электростанций с выездом в другие регионы России рассчитываются исходя из удаленности объекта.
Проведение данной операции инженерами сервисно-монтажной службы ГК ТСС позволяет обрести следующие преимущества:
— увеличение срока эксплуатации дизельного двигателя;
— избежать отказа электростанции из-за проблем, связанных с загрязнением цилиндропоршневой группы;
— уменьшить риск межвитковых замыканий, вызываемых конденсатом на обмотках базового привода;
Использование нагрузочных модулей позволяет нашим инженерам производить тестовые испытания с дизельными генераторами в диапазоне мощности от 10кВт до 500квт и более.
Что такое нагрузочный модуль?
Это электротехническое устройство, которое обеспечивает имитацию подключения заданной нагрузки к источнику снабжения электроэнергией. Может применяться для тестовых испытаний дизель-генераторов, газопоршневых генераторных установок, ИПБ и других, подобных изделий. Нагрузочный модуль способен различные типы нагрузки, в том числе, полную, активную и реактивную. Профессионалы, для обозначения устройств данного типа, используют следующие варианты наименований – резистивное устройство, нагрузочное оборудование, эквивалент нагрузки, блок тестовой нагрузки, эквивалент мощности, нагрузочное устройство, нагрузочный стенд, вероятно, существуют и иные варианты обозначения, но мы больше привыкли называть эти изделия нагрузочными модулями.
Какие ещё задачи решаются при проведении испытаний с использованием нагрузочного модуля?
— измерение мощности, вырабатываемой дизельной электростанцией;
— диагностика резервных генераторных установок;
— нагрузочные испытания во всём, допустимом диапазоне мощности генераторной установки и при различных режимах работы;
— дополнение нагрузки в случае недостатка потребления электричества;
— тестирование дизельных генераторов с автозапуском (с блоком АВР);
— тестирование и выявление дефектов в промышленных электросетях;
— проверка качества монтажа контактных групп и кабелей перед сдачей в эксплуатацию;
Почему необходимо повышать коэффициент мощности?
Коррекция коэффициента мощности
 Коэффициент мощности – это отношение полезной (активной) мощности к полной (кажущейся) мощности, потребляемой электрооборудованием объекта или электроустановкой. Он является мерой эффективности преобразования электрической энергии в полезную работу. Идеальное значение коэффициента мощности равно единице. Любая величина, меньшая, чем единица, означает, что для получения желаемого результата необходима дополнительная мощность.
Коэффициент мощности – это отношение полезной (активной) мощности к полной (кажущейся) мощности, потребляемой электрооборудованием объекта или электроустановкой. Он является мерой эффективности преобразования электрической энергии в полезную работу. Идеальное значение коэффициента мощности равно единице. Любая величина, меньшая, чем единица, означает, что для получения желаемого результата необходима дополнительная мощность.
Протекание токов приводит к потерям в генерирующих мощностях и распределительной системе. Нагрузка с коэффициентом мощности 1,0 наиболее эффективно загружает источник, а нагрузка с коэффициентом мощности, к примеру, 0,8 является причиной больших потерь в системе и более высоких расходов на электроэнергию.  Сравнительно небольшое улучшение коэффициента мощности может привести к значительному снижению потерь, так как они пропорциональны квадрату тока.
Сравнительно небольшое улучшение коэффициента мощности может привести к значительному снижению потерь, так как они пропорциональны квадрату тока.
Если коэффициент мощности меньше единицы, это указывает на присутствие так называемой реактивной мощности. Она требуется для получения магнитного поля, необходимого для работы двигателей и других индуктивных нагрузок. Реактивная мощность, которую также можно назвать бесполезной мощностью или мощностью намагничивания, создаёт дополнительную нагрузку на систему электропитания и увеличивает затраты потребителя за электроэнергию.
 Низкий коэффициент мощности обычно является результатом сдвига фаз между напряжением и током на выводах нагрузки. Также его причиной может стать высокое содержание гармоник, то есть сильно искажённая форма тока. Коэффициент мощности чаще всего понижается из-за наличия индуктивных нагрузок: асинхронных двигателей, силовых трансформаторов, ПРА люминесцентных ламп, сварочных установок и дуговых печей. Искажения формы тока могут быть результатом работы выпрямителей, преобразователей, регулируемых приводов, импульсных источников питания, газоразрядных ламп или других электронных нагрузок.
Низкий коэффициент мощности обычно является результатом сдвига фаз между напряжением и током на выводах нагрузки. Также его причиной может стать высокое содержание гармоник, то есть сильно искажённая форма тока. Коэффициент мощности чаще всего понижается из-за наличия индуктивных нагрузок: асинхронных двигателей, силовых трансформаторов, ПРА люминесцентных ламп, сварочных установок и дуговых печей. Искажения формы тока могут быть результатом работы выпрямителей, преобразователей, регулируемых приводов, импульсных источников питания, газоразрядных ламп или других электронных нагрузок.
Низкий коэффициент мощности из-за индуктивных нагрузок может быть улучшен с помощью оборудования коррекции коэффициента мощности, а низкий коэффициент мощности из-за искажения формы тока требует изменения конструкции оборудования или установки фильтров гармоник. Некоторые преобразователи позиционируются как имеющие коэффициент мощности выше 0,95, тогда как на самом деле их реальный коэффициент мощности находится в пределах от 0,5 до 0,75. Значение 0,95 основано на косинусе угла между напряжением и током и не учитывает провалы в форме тока, которые также приводят к увеличению потерь.
Для работы индуктивной нагрузки необходимо магнитное поле, для создания которого требуется ток, отстающий по фазе от напряжения. Коррекция коэффициента мощности (компенсация реактивной мощности) – это процесс компенсации отставания тока путём генерации опережающего тока при подключении конденсаторов к системе электроснабжения. При этом величина подключаемой ёмкости выбирается таким образом, чтобы коэффициент мощности был максимально возможно близким к единице.
Подробнее о коэффициенте мощности
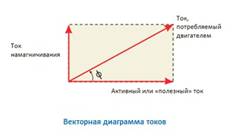
 Представим себе однофазный асинхронный двигатель. Если он является чисто резистивной нагрузкой для источника, ток будет в фазе с напряжением. Но так не бывает. Двигатель имеет магнитную систему, и ток намагничивания находится не в фазе с напряжением. Ток намагничивания – это ток, который определяет магнитный поток в сердечнике. Будучи не в фазе с напряжением, он заставляет поворачиваться вал двигателя. Ток намагничивания не зависит от нагрузки двигателя, его величина обычно находится в пределах от 20 до 60% от номинального тока двигателя при полной нагрузке, и он не вносит вклад в выполнение двигателем полезной работы.
Представим себе однофазный асинхронный двигатель. Если он является чисто резистивной нагрузкой для источника, ток будет в фазе с напряжением. Но так не бывает. Двигатель имеет магнитную систему, и ток намагничивания находится не в фазе с напряжением. Ток намагничивания – это ток, который определяет магнитный поток в сердечнике. Будучи не в фазе с напряжением, он заставляет поворачиваться вал двигателя. Ток намагничивания не зависит от нагрузки двигателя, его величина обычно находится в пределах от 20 до 60% от номинального тока двигателя при полной нагрузке, и он не вносит вклад в выполнение двигателем полезной работы.
Рассмотрим двигатель с током потребления 10 А и коэффициентом мощности 0,75. В этом случае полезный ток равен 7,5 А. Полезная мощность двигателя равна 230 х 7,5 = 1,725 кВт, однако общая потребляемая мощность составляет 230 х 10 = 2,3 кВт. Без коррекции коэффициента мощности для получения требуемой мощности 1,725 кВт (7,5 А) должна подаваться мощность 2,3 кВА (10 А). То есть потребляется ток 10 А, но полезную работу выполняют только 7,5 А.
Коэффициент мощности можно определить двумя способами:
- коэффициент мощности равен частному активной мощности (кВт) и полной мощности (кВА).
- коэффициент мощности равен косинусу угла между активной мощностью и полной мощностью (cosφ).
Коррекция коэффициента мощности
 Коррекция коэффициента мощности (компенсация реактивной мощности) – это название технологии, которая используется с начала 20 века для восстановления значения коэффициента мощности до значения, как можно более близкого к единице. Это обычно достигается подключением к сети конденсаторов, которые компенсируют потребление реактивной мощности индуктивными нагрузками и таким образом снижают нагрузку на источник. При этом не должно быть никакого влияния на работу оборудования.
Коррекция коэффициента мощности (компенсация реактивной мощности) – это название технологии, которая используется с начала 20 века для восстановления значения коэффициента мощности до значения, как можно более близкого к единице. Это обычно достигается подключением к сети конденсаторов, которые компенсируют потребление реактивной мощности индуктивными нагрузками и таким образом снижают нагрузку на источник. При этом не должно быть никакого влияния на работу оборудования.
Обычно для уменьшения потерь в системе распределения и снижения расходов на электроэнергию производится компенсация реактивной мощности с помощью конденсаторов, которые подключаются к сети для максимально возможной компенсации тока намагничивания. Через конденсаторы, содержащиеся в большинстве устройств компенсации реактивной мощности, проходит ток, который опережает по фазе напряжение, обеспечивая таким образом опережающий коэффициент мощности. Если конденсаторы подключаются к цепи, которая работает при отстающем коэффициенте мощности, это отставание соответственно уменьшается.
 Обычно значение скорректированного коэффициента мощности находится в пределах от 0,92 до 0,95. Некоторые распределительные энергокомпании поощряют работу при коэффициенте мощности, к примеру, больше 0,9, а некоторые штрафуют потребителей за низкий коэффициент мощности. Имеется много методов достижения данной цели, суть которой сводится к тому, что для снижения потерь энергии в системе распределения потребителю рекомендуется применять коррекцию коэффициента мощности. В настоящее время большинство сетевых компаний штрафуют потребителей при коэффициенте мощности ниже 0,95 или 0,9.
Обычно значение скорректированного коэффициента мощности находится в пределах от 0,92 до 0,95. Некоторые распределительные энергокомпании поощряют работу при коэффициенте мощности, к примеру, больше 0,9, а некоторые штрафуют потребителей за низкий коэффициент мощности. Имеется много методов достижения данной цели, суть которой сводится к тому, что для снижения потерь энергии в системе распределения потребителю рекомендуется применять коррекцию коэффициента мощности. В настоящее время большинство сетевых компаний штрафуют потребителей при коэффициенте мощности ниже 0,95 или 0,9.
Необходимость повышения коэффициента мощности
При должным образом выполненной коррекции коэффициента мощности достигаются следующие преимущества:
- экологические: снижение потребления электроэнергии за счёт повышения эффективности её использования. Снижение потребления приводит к уменьшению выбросов парниковых газов и замедлению истощения ресурсов ископаемого топлива для электростанций;
- уменьшение расходов на электроэнергию;
- возможность получения большей мощности от имеющегося источника;
- снижение тепловых потерь в трансформаторах и оборудовании распределения;
- уменьшение падения напряжения в длинных кабелях;
- увеличение срока службы оборудования в связи со снижением электрической нагрузки на кабели и другие электрические компоненты.
Методы улучшения коэффициента мощности
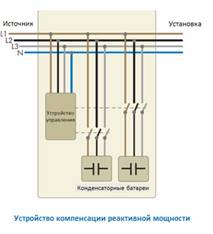
Коррекция коэффициента мощности (компенсация реактивной мощности) достигается установкой конденсаторов параллельно двигателю или схеме освещения, которые могут устанавливаться на оборудовании, распределительном щите или на вводе в электроустановку.
Статическая компенсация реактивной мощности может быть достигнута для каждого отдельного двигателя при подключении компенсирующих конденсаторов к пускателю двигателя. При этом при изменении нагрузки  двигателя может наблюдаться недо- или перекомпенсация. Статическая компенсация реактивной мощности не должна применяться на выходе регулируемого привода, электронного устройства плавного пуска или преобразователя, так как конденсаторы могут стать причиной выхода из строя электронных компонентов.
двигателя может наблюдаться недо- или перекомпенсация. Статическая компенсация реактивной мощности не должна применяться на выходе регулируемого привода, электронного устройства плавного пуска или преобразователя, так как конденсаторы могут стать причиной выхода из строя электронных компонентов.
При правильно рассчитанной компенсации реактивной мощности не должно быть перекомпенсации. Обычно компенсация реактивной мощности отдельного двигателя рассчитывается исходя из реактивной (намагничивающей) мощности, так как она сравнительно постоянна в отличие от активной мощности, это позволит избежать перекомпенсации.
При применении управления компенсацией реактивной мощности в схеме звезда/треугольник необходимо обратить внимание на то, чтобы конденсаторы не работали в режиме частого подключения и отключения. Обычно устройство компенсации подключается к сети или цепям контактора переключения на треугольник. Устройство компенсации реактивной мощности, подключаемое на вводе электроустановки, состоит из контроллера, измеряющего реактивную мощность и коммутирующего конденсаторы для поддержания значения коэффициента мощности выше заданного значения (обычно 0,95). При применении общей компенсации реактивной мощности другие нагрузки теоретически могут устанавливаться в любом месте сети.
Что является нагрузкой для двигателя
Кроме электромагнитного момента на механическую часть электропривода действуют статические нагрузки, которые делятся на силы и моменты механических потерь и силы и моменты полезных нагрузок исполнительных механизмов:
 (2.9)
(2.9)
где первая составляющая суммы является суммарными потерями в двигателе и в исполнительном механизме, а вторая – суммарным приведённым моментом полезной нагрузки.
По характеру взаимодействия с электроприводом различаются активные и реактивные силы и моменты.
Активными силами и моментами называются силы и моменты, величина и направление которых не зависит от движения электропривода; например, силы и моменты, создаваемые перемещаемым по вертикали грузом. Механическая характеристика такого вида статической активной нагрузки изображена на рис. 2.5.

Рис. 2.5. Активные нагрузки электропривода неуравновешенного (а) и уравновешенного (б) подъемных механизмов.
В зависимости от соотношения масс  и
и  двигатель работает в тормозном (
двигатель работает в тормозном (  ) или двигательном (
) или двигательном (  ) режимах.
) режимах.
Силы и моменты, возникающие как реакции на движение электропривода, называются реактивными. Направление их всегда противоположно направлению движению электропривода. По характеру зависимости от скорости реактивных сил и моментов различают нагрузки типов сухого трения (рис. 2.6):


Рис. 2.6. Реактивные нагрузки: сухое трение (а) и момент резания (б).
В момент трогания силы сухого трения могут превышать свои значения при движении (рис. 2.6а).
Силы и моменты вязкого трения зависят от скорости линейно (рис. 2.7):
 (2.10)
(2.10)
Рис. 2.7. Момент нагрузки типа вязкого трения.
Момент внутреннего вязкого трения:
 (2.11)
(2.11)
 и
и  – скорости на входе и выходе деформируемого элемента.
– скорости на входе и выходе деформируемого элемента.
По характеру влияния на механические колебания все силы и моменты делятся на консервативные и диссипативные.
При действии консервативных сил и моментов не происходит поглощение колебаний. Например, сила тяжести является консервативной силой, т. к. работа, осуществляемая этой силой за период колебаний, всегда равна нулю.
При действии диссипативных сил происходит поглощение энергии колебаний. Примером является вязкое трение, т.к. при изменении знака скорости изменяется и знак момента, а механическая мощность  сохраняет положительный знак, что соответствует поглощению колебаний.
сохраняет положительный знак, что соответствует поглощению колебаний.
На практике распространённой является вентиляторная нагрузка (рис. 2.8):
Рис. 2.8. Зависимость момента от скорости при вентиляторной нагрузке
 (2.12)
(2.12)
Коэффициент полезного действия (КПД) механизма: ηмех=η1η2η3 . где η1, η2, η3 – КПД элементов кинематической цепи.
Если известен полезный момент нагрузки механизма Mмех, то для прямого направления энергии приведённый к валу двигателя момент статической нагрузки можно определить из равенства:

(  – момент механических потерь в двигателе.)
– момент механических потерь в двигателе.)
 (2.13)
(2.13)
 — общее передаточное число от двигателя к рабочему органу механизма.
— общее передаточное число от двигателя к рабочему органу механизма.
При обратном направлении потока энергии, когда нагрузка является активной и двигатель должен работать в тормозном режиме, уравнение баланса мощностей можно записать как:

 (2.14)
(2.14)
Момент механических потерь в двигателе невелик, он составляет 1-5% номинального момента двигателя. Во многих практических случаях полагают  , т.к. точность определения момента Mмех невелика и он рассчитывается с некоторым запасом. При этом формулы приведения момента статической нагрузки к валу двигателя принимают вид:
, т.к. точность определения момента Mмех невелика и он рассчитывается с некоторым запасом. При этом формулы приведения момента статической нагрузки к валу двигателя принимают вид:
— для прямого направления передачи энергии (двигательный режим работы)
 (2.15)
(2.15)
— для обратного направления (тормозной режим работы)
 (2.16)
(2.16)
Если рабочий орган движется поступательно, то уравнение баланса мощностей имеет вид (ΔМ=0):

 (2.17)
(2.17)
Соответственно для обратного направления потока механической энергии
 (2.18)
(2.18)
Необходимо иметь в виду, что КПД передач зависит от нагрузки, а для червячного зацепления – и от направления передачи энергии, поэтому при расчётах следует использовать соответствующие зависимости η от полезной нагрузки передач.
Система контроля нагрузки высоковольтных синхронных электродвигателей на основе микропроцессора STM32F407
Одним из достоинств синхронного электродвигателя является возможность получения оптимального режима по реактивной энергии. Показатели работы синхронного двигателя зависят от режима нагрузки и тока возбуждения. Для оценки функционирования и оперативного обслуживания параметров синхронных двигателей была создана система контроля параметров высоковольтных (6000 В) синхронных двигателей на основе микропроцессорного устройства.
Устройство предназначено для контроля значений основных параметров синхронных электродвигателей: тока нагрузки, коэффициента мощности cos(f), напряжения, частоты сетевого напряжения и измерения пусковых характеристик в реальном времени с записью в память устройства на карту microSD. Функциональная схема системы контроля параметров синхронных двигателей показана на рис. 1.

Рис. 1. Функциональная схема системы контроля параметров синхронных двигателей
Система контроля нагрузки реализована на микропроцессорном устройстве (МУ) Neyrino, разработанном на основе микропроцессора STM32F407VGT с ядром ARM Cortex-M4 компании ST Microelectronics. Во время работы микропроцессорное устройство производит вычисления и поддерживает связь с внешней программой сбора данных с графическим интерфейсом для визуализации процесса в силовой цепи. Обмен сведениями МУ Neyrino с программой сбора данных происходит на основе сетевых протоколов передачи информации TCP/IP Ethernet 100/10M.
МУ Neyrino предназначено для использования в АСУ ТП и информационных системах, а также для функционирования в качестве устройств локальной автоматики. Neyrino работает на процессоре с ядром ARM Cortex-M4 STM32F407VGT, который представляет собой высокопроизводительный 32-битный RISC-процессор с поддержкой инструкций цифровой обработки сигналов DSP и вычислений с плавающей точкой (операции деления и умножения выполняются за один такт), что позволяет использовать его в системах измерения и регулирования привода в реальном времени. Объем флэш-памяти программ составляет 1 Мбит, оперативная память 192 кбит, частота тактирования 168 мГц. Есть возможность установки карты памяти формата microSD. Обобщенная структура микроконтроллеров STM32F4xx представлена на рис. 2.

Рис. 2. Обобщенная структура микроконтроллеров STM32F4xx
МУ Neyrino представляет собой специализированный одноплатный микроконтроллер, созданный для выполнения задач сканирования входов, производства необходимых вычислений и передачи информации. На одной плате находятся преобразователь питания 12 В в 5 В, 3,3 В, схемы делителей и релейные выводы. Аналоговые входы обрабатываются с помощью 12-разрядного АЦП с быстродействием 2,4 MSPS (7,2 MSPS при групповой работе). Релейные выходы служат для управления технологическим оборудованием, если требуется. При помощи порта Ethernet 100/10M в устройстве реализуются функции объединения в локальную сеть. Светодиодные индикаторы «Работа» и «Питание» отображают текущее состояние устройства. Изображение печатной платы приведено на рис. 3.

Рис. 3. Внешний вид печатной платы
Принцип функционирования микропроцессорного устройства основан на измерении аналоговыми преобразователями ADC величин тока двигателя через трансформаторы тока, напряжения высоковольтной сети с трансформатора собственных нужд 6000/100 В, измерении интервалов времени между вектором напряжения и вектором тока синхронного двигателя с точностью до 0,01 электрического градуса и вычислении коэффициента мощности — cos(f). По измеренному периоду времени вычисляется частота сетевого напряжения с точностью до 0,1 Гц. После измерения значения тока, коэффициента мощности и напряжения вычисляется полная и активная мощности, потребляемые синхронным двигателем из сети. Измеренные данные отображаются на экране монитора в доступной форме (рис. 4).

Рис. 4. Измеренные данные на экране
Принципиальная схема преобразователей I-U и U-U датчиков построена на операционных усилителях микросхемы LM224 и показана на рис. 5. Переменное напряжение 0–3 В трансформатора тока ТТ1 поступает на мостовой выпрямитель на диодах D1–D4. Сопротивление R35 является нагрузкой и формирует нагрузочную характеристику трансформатора тока ТТ1. Падение напряжения на R35 является входным для преобразователя ток-напряжение I-U датчика тока ДТ1, выполненного на ОУ DA1.1.

Рис. 5. Принципиальная схема преобразователей
Выход DA1.1 подключен на аналоговый вход IN_A1 STM32F407. Коэффициент усиления ДТ1 подбирают резисторы R3, R5. Другой преобразователь ток-напряжение I-U датчика тока ДТ2 для трансформатора ТТ2 выполнен по аналогичной схеме на ОУ DA1.3. Коэффициент усиления ДТ2 подбирают резисторы R25, R27. Датчик напряжения представляет собой понижающий трансформатор Tr со 100 до 10 В, мостовой выпрямитель на диодах D9–D12, делитель напряжения на резисторах R34, R39 и ОУ DA2.1, выход которого соединен с аналоговым входом IN_A3 STM32F407. Коэффициент усиления датчика напряжения (ДН) устанавливается резисторами R14, R16. Для каждого из датчиков тока и напряжения ДТ1, ДТ2, ДН есть свой компаратор КП1, КП2, КП3 для обнаружения перехода переменного напряжения через ноль. Прямоугольные синхроимпульсы, которые формируются на ОУ DA2.2 компаратора КП3, являются точкой отсчета для измерений периода времени напряжения, отсчета времени между напряжением и токами фаз, синхроимпульсы которых формируются операционными усилителями ОУ DA1.2 КП1 и ОУ DA1.4 КП2. Выходы компараторов КП1–КП3 подключены на дискретные входы IN_D 1–3 микроконтроллера. По положительному фронту каждого входного сигнала происходит прерывание в STM32F407, вызывающее функции вычисления разницы между током и напряжением или вычисления частоты. По величине напряжения на аналоговых входах IN_A 1-3 микроконтроллера определяется среднеквадратичное или действующее значение тока или напряжения.
Программа сбора данных реализована на платформе MS Windows. Обмен данными между программным обеспечением и микропроцессорным устройством происходит по технологии «клиент-сервер». В качестве HTTP-сервера выступает МУ Neyrino. HTTP-сервер отвечает на запросы со стороны клиента. При этом клиентов может быть много, вот почему поддерживается мультиподключение. Графический интерфейс окна клиента показан на рис. 6. HTTP-сервер осуществляет связь с клиентом через клиентский и серверный сокеты, с установленным IP-адресом и номером порта. Каждые 150 мс происходит запись текущих значений измерения на карту памяти формата microSD, установленную на плате устройства. Общее количество информации, записанной на карту, зависит от размера памяти (от 24 часов и более). При интервале записи в 150 мс в течение 24 часов потребуется 256 Мбайт памяти на карте SD. Входные и расчетные данные могут быть отображены в виде графиков и записаны для построения трендов и другой аналитической обработки.
На графике (рис. 6) показан момент включения высоковольтного (6000 В) синхронного двигателя мощностью 1250 кВт в сеть после пуска и разгона тиристорным устройством плавного пуска. Переключение с тиристорного устройства плавного пуска на питание от сети 6000 В происходит, когда скорость двигателя будет немного больше номинальной и есть синхронизация фаз обоих источников питания.

Рис. 6. Панель графиков
Также в МУ Neyrino реализован веб-сервер, который вместе с HTTP-сервером является частью пакета программ, разработанного на уровне lwIP-стека TCP/IP с открытым исходным кодом, созданного разработчиками компании ST Microelectronics и предназначенного для встраиваемых систем. Для доступа к Ethernet используется микросхема Ethernet PHY (физического уровня) серии LAN8720 с интерфейсом RMII. Для взаимодействия веб-сервера с клиентами по сети формируются MAC-адрес, IP-адрес, шлюз, маска сети и номер порта, на котором работает сервер. Данные параметры сети для веб-сервера такие же, как у HTTP-сервера. При формировании странички, которую должен отображать браузер, реализуются SSI- и CGI-обработчики. CGI (Common Gateway Interface — общий интерфейс шлюза) — стандарт интерфейса, используемый для связи внешней программы с веб-сервером. Интерфейс CGI осуществляет связь между веб-сервером и браузером пользователя с динамически обновляемой информацией. Для отправки информации браузеру применяется технология SSI (Server Side Includes — включения на стороне сервера), осуществляющая сборку веб-страницы на сервере и выдачу клиенту отдельных частей полученного HTML-документа.
Для подключения к веб-серверу Neyrino не нужно специализированного программного обеспечения — достаточно любого веб-браузера. На странице веб-сервера можно наблюдать состояние переменных объектов измерения (рис. 7). Доступны значения: ток двигателя, мощность двигателя, коэффициент мощности, значение напряжения сети. Данные на странице веб-сервера обновляются каждую секунду.

Рис. 7. Панель веб-сервера
Представленная система измерения является эффективным методом автоматизированного контроля динамических процессов. Дружественность человеко-машинного интерфейса (HMI) и его удобство, полнота и наглядность представляемой на экране информации — все это повышает эффективность взаимодействия пользователя с технологической системой.

