Схемы пуска асинхронного электродвигателя
Схемы пуска асинхронного электродвигателя
Асинхронные электродвигатели с короткозамкнутым ротором применяются в строительстве, металлообработке, химической, пищевой и других промышленных отраслях. Особенно широко используются трехфазные двигатели. Для их работы не требуются дополнительные пусковые обмотки. Однако отсутствие дополнительной обмотки приводит к тому, что в момент пуска на статоре возникает высокий пусковой ток, который может стать причиной просадки напряжения и, как следствие, перегрузки линии электропитания, короткого замыкания и других нештатных ситуаций.
Существует несколько схем запуска асинхронных двигателей — их выбирают в соответствии с особенностями и спецификой промышленного применения. Вкратце расскажем об этих схемах, за подробностями сюда https://tehprivod.su/.
Прямой пуск
Прямой пуск возможен для электродвигателей малой мощности. Значение пускового тока, превышающее номинальное в 7 раз, не является для них проблемой.
«Ахиллесова пята» прямого пуска — одновременное подключение нескольких двигателей к электрической подстанции малой мощности. При добавлении к сети еще одного двигателя просадка напряжения может быть критической и повлечь за собой остановку работающего оборудования.
Во избежание описанной ситуации время перегрузки сети должно быть максимально снижено. Как этого достичь? По возможности запускать электродвигатель с минимальной нагрузкой. Если оборудование предполагает длительные просадки при прямом пуске, они должны учитываться еще на стадии проектирования промышленных электросетей.
Плавный пуск
Снизить значение пускового тока можно, понизив напряжение на статоре при запуске электродвигателя. В процессе разгона его значение можно постепенно увеличивать.
Реостатный способ плавного пуска электродвигателя привлекает простотой и дешевизной, но сегодня он устарел и серьезно проигрывает устройствам плавного пуска.
Недостатки реостатной схемы очевидны:
Ее проблематично автоматизировать, усовершенствовав контроль и упростив управление.
Пуск электродвигателя под нагрузкой усложняется — крутящий момент снижается в 4 раза. Как следствие, двигателю требуется больше времени, чтобы набрать рабочую скорость.
Устройства плавного пуска, также известные как софтстартеры, лишены перечисленных недостатков. Они компактны и функциональны. Простейшие УПП обеспечивают:
Плавный пуск, разгон и остановку двигателя.
Возможность настройки и регулирования рабочих параметров.
Многоуровневую защиту электродвигателя.
Постоянное ограничение тока.
Пуск по схеме «звезда-треугольник»
Этот вариант привлекает простотой и дешевизной. Он предполагает соединение обмоток «звездой» при запуске, а в процессе разгона электродвигателя – перекоммутацию обмоток в нормальное положение «треугольник».
Напряжение на обмотке уменьшается почти в 2 раза, но в случае отказа одного из контакторов, управляемых вручную, пострадает вся коммутация. Как следствие, существенно упадет мощность двигателя, возникнут проблемы с его запуском.
Важно учитывать и уменьшающийся крутящий момент при соединении обмоток по схеме «звезда», вследствие которого запуск электропривода под нагрузкой может быть затруднен.
Пуск с преобразователем частоты
Пуск асинхронных электродвигателей с помощью частотных преобразователей привлекает гибкостью управления. Электронное управление современных ПЧ обеспечивает мягкий пуск и дальнейшую плавную регулировку работы электропривода. При этом соотношение напряжения и частоты придерживается строго заданных параметров.
Преимущество частотных преобразователей в том, что потребление электроэнергии сокращается почти на 50%. Как следствие, сокращаются текущие эксплуатационные расходы предприятия, снижается себестоимость производства.
45. Схемы пуска асинхронного двигателя с короткозамкнутым ротором.
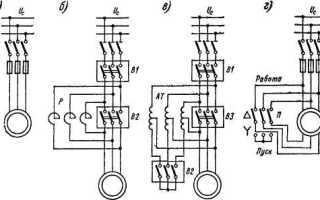
Наиболее простым способом пуска двигателя с короткозамкнутым ротором является включение обмотки его статора непосредственно в сеть, на номинальное напряжение обмотки статора (рис. 28-1, а). Такой пуск называется прямым.
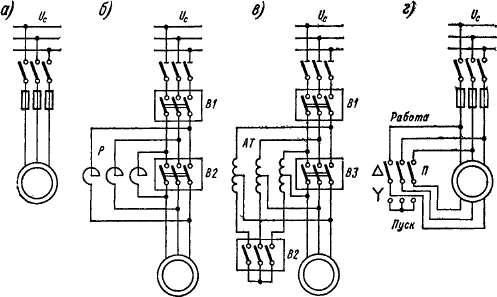
Рис. 28-1. Схемы способов пуска двигателей с короткозамкнутым ротором: а — прямой; б — реакторный; в — автотрансформаторный; г — с переключением со звезды на треугольник
46.Пуск двигателя с фазным ротором.
Одной из разновидностей асинхронного двигателя является двигатель с фазным ротором. На практике данный двигатель довольно часто применяется, благодаря улучшенным пусковым свойствам и характеристикам.
Устройство асинхронного двигателя с фазным ротором
Как и у АД с короткозамкнутым ротором, сердечник его статора набирается из листов электротехнической стали, а затем спрессовывается. В пазы сердечника укладываются фазные обмотки, концы которых затем выводятся в коробку, расположенную на корпусе двигателя.
Отличие заключается в роторе двигателя. Он также, как и статор набирается из листов стали, спрессовывается и в него набирается фазная обмотка. Причем число фаз ротора равно числу фаз статора, в то время как у короткозамкнутого, каждый стержень “беличьей клетки” образует отдельную фазу. Отсюда название – фазный ротор.
Концы фаз фазного ротора соединяются с контактными кольцами, которые расположены на валу ротора. В свою очередь, контактные кольца соприкасаются с графитовыми щетками, которые имеют выводы в коробку на корпусе, для возможности подключения дополнительного сопротивления. Это сопротивление в цепи ротора оказывает влияние на токи, протекающие в нем, а как следствие на его характеристики. При увеличении сопротивления цепи ротора, механическая характеристика становится более мягкой.
Влияние сопротивления сказывается и на пуске двигателя, а именно добавочное сопротивление позволяет осуществить более мягкий пуск, снизить пусковые токи и моменты и как следствие, снизить удары в механической части привода в момент пуска.
Как правило, используют переменное сопротивление, которое уменьшают с увеличением оборотов двигателя. Так как зачастую оно представляет из себя ступенчатый реостат, то и пуск двигателя осуществляется тоже ступенчато.
Для увеличения КПД двигателя и сохранения целостности щеток в конструкции двигателя предусматривается специальное щеткоснимательное устройство, которое убирает щетки после пуска. КПД повышается за счет того, что на щетках падает часть напряжения.
Таким образом, преимуществом асинхронного двигателя с фазным ротором является возможность пуска под нагрузкой, но недостатком является более сложная конструкция, а также его дороговизна по сравнению с двигателем с короткозамкнутым ротором. Короткозамкнутый кроме того, является более простым и надежным, не требует дополнительных устройств.
47. Регулирование скорости вращения асинхронного двигателя с фазным ротором.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов

Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
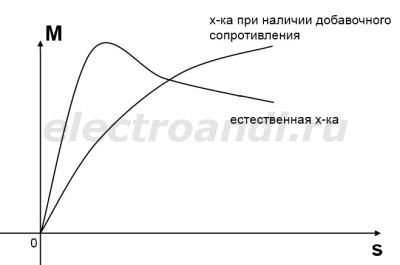
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потерив цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому,механическая характеристикадвигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
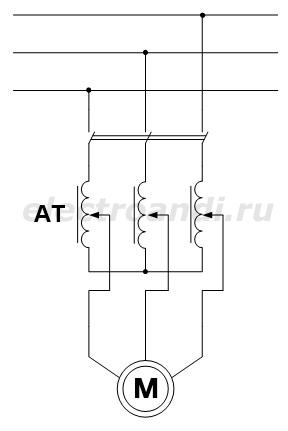
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
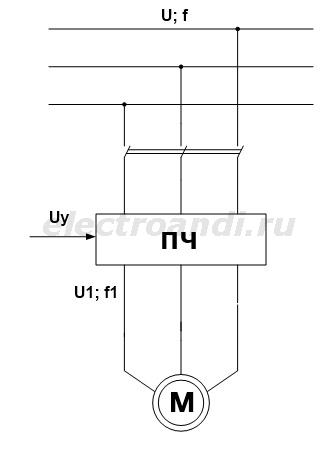
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Электрическая схема запуска асинхронного двигателя
Александр Ситников (Кировская обл.)
Рассматриваемая в статье схема позволяет осуществить безударный пуск и торможение электродвигателя, увеличить срок службы оборудования и снизить нагрузку на электросеть. Плавный пуск достигается путём регулирования напряжения на обмотках двигателя силовыми тиристорами.
Устройства плавного пуска (УПП) широко применяются в различных электроприводах. Структурная схема разработанного УПП приведена на рисунке 1, а диаграмма работы УПП – на рисунке 2. Основой УПП являются три пары встречно-параллельных тиристоров VS1 – VS6, включенных в разрыв каждой из фаз. Плавный пуск осуществляется за счёт постепенного

увеличения прикладываемого к обмоткам электродвигателя сетевого напряжения от некоторого начального значения Uначдо номинального Uном. Это достигается путём постепенного увеличения угла проводимости тиристоров VS1 – VS6 от минимального значения до максимального в течение времени Тпуск, называемого временем пуска.
Обычно значение Uначсоставляет 30…60% от Uном, поэтому пусковой момент электродвигателя существенно меньше, чем в случае подключения электродвигателя на полное напряжение сети. При этом происходит постепенное натяжение приводных ремней и плавное зацепление зубчатых колес редуктора. Это благоприятно сказывается на снижении динамических нагрузок электропривода и, как следствие, способствует продлению срока службы механизмов и увеличению интервала между ремонтами.
Применение УПП также позволяет снизить нагрузку на электросеть, поскольку в этом случае пусковой ток электродвигателя составляет 2 – 4 номинала тока двигателя, а не 5 – 7 номиналов, как при непосредственном пуске. Это важно при питании электроустановок от источников энергии ограниченной мощности, например, дизель-генераторных установок, источников бесперебойного питания и трансформаторных подстанций малой мощности

(особенно в сельской местности). После завершения пуска тиристоры шунтируются байпасом (обходным контактором) К, благодаря чему в течение времени Траб на тиристорах не рассеивается мощность, а значит, экономится электроэнергия.
При торможении двигателя процессы происходят в обратном порядке: после отключения контактора К угол проводимости тиристоров максимален, напряжение на обмотках электродвигателя равно сетевому за вычетом падения напряжения на тиристорах. Затем угол проводимости тиристоров в течение времени Тторм уменьшается до минимального значения, которому соответствует напряжение отсечки Uотс, после чего угол проводимости тиристоров становится равным нулю и напряжение на обмотки не подается. На рисунке 3 приведены диаграммы тока одной из фаз двигателя при постепенном увеличении угла проводимости тиристоров.

На рисунке 4 приведены фрагменты принципиальной электрической схемы УПП. Полностью схема приведена на сайте журнала. Для её работы требуется напряжение трех фаз А, В, С стандартной сети 380 В частотой 50 Гц. Обмотки электродвигателя при этом могут быть соединены как «звездой», так и „треугольником“.

В качестве силовых тиристоров VS1 – VS6 применены недорогие приборы типа 40TPS12 в корпусе ТО-247 с прямым током Iпр= 35 А. Допустимый ток через фазу составляет Iдоп= 2Iпр= 70 А. Будем считать, что максимальный пусковой ток составляет 4Iном, откуда следует, что Iном
Схема работы устройства плавного пуска, его назначение и конструкция
Электрические двигатели являются простыми и надежными машинами, но имеют и некоторые недостатки, которые усложняют их использование. В частности, при запуске такие устройства имеют высокие значения потребляемого тока и без специальных устройств запускаются с рывком из-за несогласованности крутящего момента двигателя и нагрузки на его валу. Дополнительными приборами, которые обеспечивают плавную работу двигателя при запуске и позволяют снизить пусковые токи называют устройствами плавного пуска.

Что такое устройство плавного пуска
Устройство плавного пуска (УПП) – это электротехнический прибор, который применяется в работе асинхронных двигателей и позволяет контролировать и управлять его запуском и параметрами для безопасной работы в сети переменного тока. Такое устройство снижает воздействие на двигатель ряда негативных факторов, в том числе уменьшает вероятность повышенного нагрева двигателя, устраняет рывки, обеспечивая плавный запуск и выход на рабочую нагрузку. Также устройства плавного пуска снижают негативное влияние на электрическую сеть посредством уменьшения пусковых токов электродвигателя.
Часто устройство плавного пуска электротехнические специалисты и люди, связанные с работой электродвигателей, называют такие приборы «мягкими пускателями». Это связано с тем, что на английском языке (а большинство качественных устройств – импортного производства) эти устройства называются «soft starter», что и означает «мягкий пускатель».
Плавный пуск электродвигателей с помощью преобразователей частоты и мягких пускателей позволяет решать большое количество задач и управлять работой электродвигателя в широких пределах его параметров. Особенно часто УПП применяют при работе в условиях тяжелого пуска (с большой инерцией или запуском под нагрузкой с четырехкратными пусковыми токами, с разгоном двигателя не менее 30 секунд) и особо тяжелого пуска (при шести или восьмикратных значения пусковых токов и большим временем разгона двигателя).

Также УПП применяют при сниженной или ограниченной мощности электрической сети, когда пусковые токи могут создавать значительные перегрузки в сети, в том числе с влиянием на автоматическое защитное оборудование, которое при высоких значениях пускового тока, даже кратковременного воздействия, отключает питание.
Сфера применения устройств плавного пуска достаточно обширна: их применяют в работе насосных агрегатов, в вентиляционном и компрессорном оборудовании, на электродвигателях тяжелых производств и в строительстве, в дробильном оборудовании, на конвейерах, эскалаторах и в других механизмах и оборудовании.
Принцип работы
Главный минус электродвигателей асинхронного типа – это то, что момент силы на валу пропорционален квадрату напряжения, которое приложено к электродвигателю. Это создает сильные рывки при запусках и в момент прекращения работы, что также повышает значения индукционного тока.
Устройства плавного пуска могут быть механическими и электрическими, а также комбинированными сочетая в себе положительные черты обоих устройств.
Механические устройства плавного пуска работают по принципу противодействия резкому увеличению оборотов электродвигателя влияя на его ротор механическим способом при помощи тормозных колодок, различных муфт, противовесов, магнитных блокираторов и прочих механизмов. Такие механизмы в последнее время применяются не часто, так как есть более совершенные устройства электрического управления.

Электрические УПП постепенно повышают ток или напряжение от опорного уровня до максимального, что позволяет плавно наращивать обороты электродвигателя и снизить нагрузки и пусковые токи. Чаще всего электрические устройства плавного пуска управляются электронным способом при помощи компьютерных систем или электронных приборов, что позволяет изменять параметры запуска и контролировать динамические характеристики. Мягкие пускатели позволяют изменять режимы работы электродвигателя в зависимости от приложенной нагрузки и позволяют реализовать ту или иную зависимость между скоростью вращения вала и напряжением.
Принцип работы электрических устройств основывается на двух методах:
- Метод ограничения тока в обмотке ротора – реализуется при помощи катушек, соединенных по схеме «звезда»;
- Метод ограничения напряжения и тока в статоре (при помощи тиристоров, симисторов или реостата).
По способу регулировки также различают одно-, двух и трехфазные устройства. УПП с регулировкой напряжения по одной фазе применяют для оборудования до 10 кВт, положительные моменты при таком регулировании – это снижение динамических ударов и рывков при старте, негативные – несимметричная нагрузка при запуске и большие пусковые токи. Мягкие пускатели с регулировкой по двум фазам позволяют снизить пусковые токи и нагрев двигателя при старте и используются в условиях среднетяжелого пуска. Трехфазные устройства плавного пуска значительно снижают пусковые токи и позволяют плавно останавливать электродвигатель, а также обеспечивать аварийное отключение. Такие устройства применяют при тяжелом пуске со значительной нагрузкой, а также с частыми включениями/отключениями двигателя.
Схема подключения электродвигателя к УПП
Для того, чтобы подключить устройство плавного пуска к электродвигателю и питающей сети следует руководствоваться инструкцией на данный тип прибора, там будут указаны все важные аспекты при подключении: последовательность цепи, выводы заземления и нейтрали, а также правильная наладка пуска, разгона и торможения. Но в целом, существуют стандартные способы подключения, которые подходят для большинства устройств плавного пуска.

Каждое УПП имеет контакта на входе и столько же на выходе для подключения фаз, систему управления пуском и остановкой (кнопки ПУСК, СТОП), другие кнопки и контакты управления. К устройству подводят питающие кабели на входные клеммы (обычно это обозначения L1, L2, L3), а от выводных клемм (обозначения T1, T2, T3) подключают электродвигатель. При этом важно подключать УПП к сети через вводной автомат защиты и использовать при подключении двигателя к устройству плавного пуска и самого УПП к сети кабели с номинальным сечением, соответствующем предельному значению тока двигателя.
Некоторые устройства могут управляться не только с переключателей и устройств управления на самом приборе, но и через контакты реле или контроллера – это усложняет схему подключения прибора, но расширяет его возможности.