
Схемы торможения асинхронных двигателей
Схемы торможения асинхронных двигателей
 После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом . Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением .
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
 При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
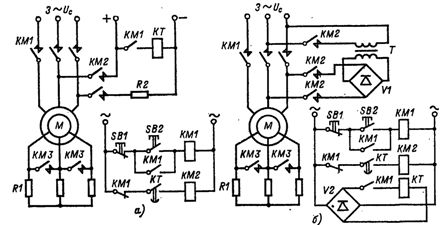
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
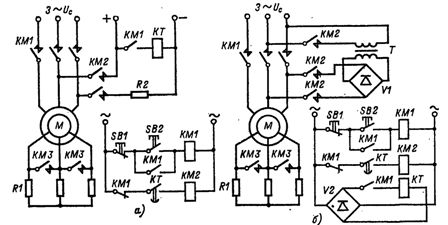
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные н а рис. 1 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на р и с. 1 , б.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 — 0,2) ω уст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
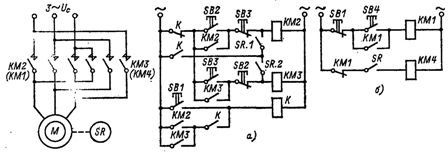
Рис. 2 Узлы схемы управления торможения противовключением асинхронного двигателя с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске двигателя реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
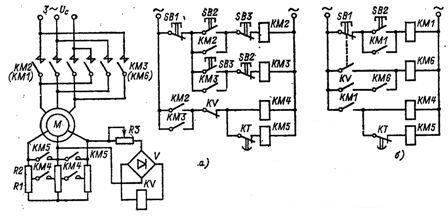
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R 2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 — 20 % установившейся начальной скорости ω пер = (0,1 — 0,2) ωуст , реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для удержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз не одновременно с двигателем, а с некоторой задержкой по времени, например после окончания электрического торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 4, в).
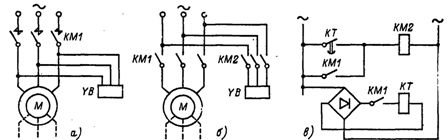
Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схемы конденсаторного торможения асинхронных двигателей
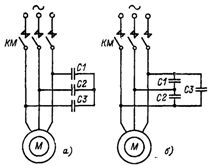
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 — С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рис. 5, а) или треугольника (рис. 5, б).
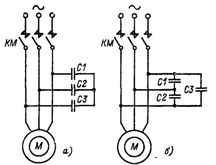
Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных двигателей
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Монтажный диск с подогревом для ЭМ тормозов серий HPS / H2SP EMA-ELFA













Цена по запросу 

Возникли вопросы по товару?
купить в компании АРВЕ, чтобы узнать наличие, сроки поставки, условия доставки, скачать прайс-лист, каталог или инструкцию, получить консультацию по всем возникающим вопросам, обращайтесь к нашим менеджерам удобным вам способом.
Монтажные диски предназначены для крепления электромагнитных дисковых тормозов постоянного тока серии HPS и H2SP. Завод предлагает различные варианты исполнения: от напряжения питания до климатических условий, что позволяет выбрать подходящий вариант для индивидуальных потребностей пользователя.
Одним из таких дополнительных вариантов исполнения, является монтажный диск с нагревательным элементом, позволяющий использовать автономное отопление, для предотвращения конденсации воды внутри рабочих элементов тормоза, что является особенно важным при эксплуатации электродвигателей при температуре ниже нуля градусов по Цельсию и (или) высокой влажности. При эксплуатации в сложных погодных условиях, подогрев монтажного диска, одновременно, нагревает подшипник электродвигателя, что дает полную готовность привода к запуску. На нагревательный элемент подается стандартное напряжение 230V переменного тока, через внешний кабель, крепящийся к монтажному диску. Схема включения в цепь питания электродвигателя с тормозом представлена на фото.
Электрическая схема построена таким образом, чтобы существовала возможность независимого включения/выключения нагревателя (GR) выключателем (W1). Питание нагревателя включается с момента остановки двигателя и прерывается с момента его запуска. В приведенной схеме, это реализовано следующим способом: управление питанием осуществляется через контакт управляющего контактора (S), который разрывает цепь питания при работе электродвигателя и нахождении электромагнитного тормоза под напряжением (в расторможенном состоянии).
Отключение питания двигателя и тормоза (замедление, остановка двигателя) снова включает нагреватель.
Пример процедуры запуска привода в соответствии с приведенной схемой:
— включение (W1) (если не был включен) и нагрев тормоза,
— включение главного выключателя (W),
— включение тормоза (H) и одновременная подача напряжения на клеммы двигателя (М),
— отключение нагревателя (GR).
Что такое электродвигатель с тормозом

- Существующие схемы подключения:
- Пример с рекуперативной системой
- Пример с электромагнитным стопором
Действенным способом снижения скорости вращения двигателя является электрическое торможение. За счёт чего оно происходит? Тормозная сила создается за счёт преобразования кинетической и потенциальной энергии в электрическую.
Способы торможения бывают:
- механические,
- электронные.
В первом случае кинетическая энергия конвертируется в термическую. Но более совершенным считается второй вариант, при котором механическое напряжение элементов электродвигателя совсем незначительно. Принцип действия элементов системы здесь намного сложнее. Пока мотор включен во время работы в режиме пуск, диод выпрямляет подаваемый переменный ток.
При переводе системы на остановку или выключение с помощью реле или переключателя напряжение сохраняется. Это напряжение создает электрическое усилие для быстрой и эффективной остановки вращения вала. Чем больше емкость электролитического конденсатора, тем быстрее и эффективнее прекратится вращение ротора.

Существующие схемы подключения:
- с динамическим торможением;
- с механическим тормозом;

- с подключением тормозящих конденсаторов.
Пример с рекуперативной системой
При динамическом торможении асинхронного двигателя обмотку статора отключают от питания переменного напряжения и переключают на сеть постоянного тока. Этот режим поддерживает постоянную скорость вращения под действием внешней нагрузки.
Эффективная схема динамического торможения рекуперативной системы представлена ниже (клик по картинке увеличит ее в размере).

Рекуперативная система для возврата энергии из серии энергонакопительных механизмов имеет в своём составе обмотку возбуждения (11), ротор (12, 13) и дополнительные элементы:
- переключатели (2, 18) и выпрямительные диоды (10, 15);
- соединенная последовательно с мотором аккумуляторная батарея (1);
- цепь управления (3, 19) для контроля рабочего цикла переключателя (2);
- переключатель полярности (8, 9) для перемены направления вращения двигателя на обратное;
- схема управления (19).
Двигатель работает в условиях динамического торможения и возврата энергии в аккумулятор. Это позволяет уменьшить потери и добиться экономии топлива. Рекуперация энергии используется в транспортных средствах, таких как погрузчики, электропоезда и т. д.

Пример с электромагнитным стопором
Современная промышленность выпускает различные варианты электродвигателей с тормозом. Установка моторов с электромагнитным тормозом, обычно, осуществляется на оборудовании, которому требуется мгновенная остановка. Это нашло довольно широкое применение для работы на станках и конвейерах, где большую роль играет соблюдение техники безопасности.
На практике это обычные промышленные асинхронные электродвигатели, особенностью которых является их длина (оборудование облачается в специальный кожух).

Движки с электромагнитным тормозом запитываются как от переменного, так и от постоянного тока.
Первый способ подходит для случаев, когда неважно время срабатывания. При прекращении подачи напряжения из-за наведённого магнитного поля происходит постепенное уменьшение тока катушки. Медленное снижение магнитного поля приводит к медленному росту тормозного момента и длительному срабатыванию тормоза.
Второй вариант используется там, где требуется много срабатываний и точное позиционирование электропривода. В момент прерывания тока между катушкой и выпрямителем получается довольно быстрое снижение магнитного поля. Тормозной момент увеличивается быстро и соответственно срабатывание тормоза происходит почти мгновенно.
Двигатели с пристроенным электромагнитным тормозом
Двигатели с пристроенным электромагнитным тормозом АИР71ЕК. АИР132ЕК, АИР6ЗЕК2. АИР1З2ЕК2 далее «двигатели», изготавливаются в диапазоне высот оси вращения 63. 132 мм и предназначены для привода механизмов, требующих фиксированного останова за регламентированное время после отключения от сети или позиционирования груза рабочих органов механизмов.
- Описание
Режим работы двигателей S4-40% по ГОСТ МЭК 60034-1.
Число включений в час 240, 120, 60 ( в зависимости от исполнения).
Группа исполнения по стойкости к воздействию механических внешних факторов – М8 и М3 по ГОСТ 17516.1-90.
Степень защиты двигателей — Р54, тормоза IP55 по ГОСТ 17494-87.
Климатическое исполнение и категория размещения — У2, УЗ, Т2, Т3 по ГОСТ 15150-69. По согласованию с изготовителем возможна поставка двигателей в исполнении У1, а также степенью защиты IP55.
Двигатели с пристроенным электромагнитным тормозом изготавливаются на базе двигателей общепромышленного исполнения по ТУ РБ-05755950-420-93.
Двигатели АИР71ЕК2. АИР1З2ЕК2 имеют рычаг для ручного растормаживания, позволяющего проводить пуско-наладочные работы, а также разблокировать тормозную систему при потере напряжения на блоке питания.
Питание электромагнитного тормоза осуществляется от независимого источника 220В, 380В 50 Гц через выпрямительный блок, входящий в комплект поставки.
Выпрямительный блок монтируется вне корпуса электродвигателя (в шкафу, пульте управления).
По согласованию с Изготовителем выпрямительный блок может быть установлен в коробке выводов двигателя.
Высота оси вращения, мм
Номинальный тормозной момент, Н • м
Номинальный тормозной зазор, мм
Технические характеристики, габаритные, установочные и присоединительные размеры двигателей с пристроенным электромагнитным тормозом соответствуют параметрам двигателей общепромышленного исполнения (рисунок и таблица «Размеры двигателей общепромышленного исполнения»), за исключением габаритного размера по длине (L30) и массы, приведенных в таблице 2.
Габаритный размер по длине (L30) и масса двигателей с пристроенным электромагнитным тормозом
Высота оси вращения, мм
AИР63EК2 А(В)
АИР80ЕЗК А(В)
АИР80ЕК А(В)
АИР80ЕЗК А(В)
АИР100ЕК S(L)
АИР100ЕЗК S(L)
L 30, мм,не более
366 (390)
376 (400)
450 (481)
460 (491)
565 (600)
576 (614)
Масса, кг, не более
16.0 (19,0)/ 21,0 (24,0)
d₂xl₂ – для исполнения IMXXX2
Управление электромагнитным тормозом осуществляется через выпрямительный блок. Возможны три варианта подключения катушки электромагнита, которые представлены на рис. 1а, 1б, 1в. где:
— UZ1 — выпрямительный блок;
— YВ1 — катушка электромагнита;
— К1 — замыкающие контакты реле, подключающие тормоз к цепи питания;
— КМ1 — дополнительный контакт магнитного пускателя, подключающего двигатель к силовой цепи.
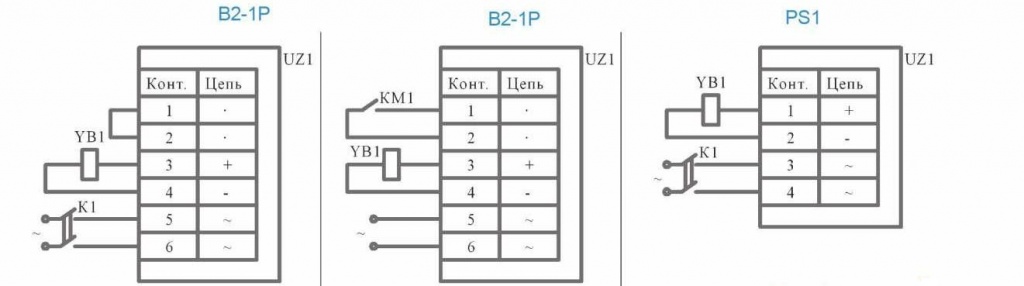
Рис. 1a Рис. 1б Рис. 1в
Схема управления по стороне переменного тока (рис. 1а) используется в механизмах для обеспечения процесса подтормаживания и уменьшения времени выбега рабочего органа (дисковые пилы, фрезы, строгальный барабан и т.п Э.
Схема управления по стороне постоянного тока (рис. 16) используется в тех случаях, где требуется точное позиционирование или регламентированное время останова механизма.
Электромагнит тормоза, запитанный через схему рис. 1в позволяет получать тормозом параметры времени присоединения и разъединения аналогичные как в случае прекращения цепи по стороне постоянного напряжения.
В первом случае (рис.1а) при отключении питания электромагнита, энергия самоиндукции компенсируется постепенно по контуру катушка-выпрямитель. Во втором случае (рис. 16) при отключении питания электромагнита, энергия самоиндукции компенсируется практически мгновенно электромагнитной дугой. В обоих случаях время торможения зависит от инерционности системы и настраивается усилием тормоза.

