Электромеханическая характеристика синхронного двигателя
4.2 Работа 9 Статические характеристики синхронного двигателя при питании от преобразователя
- Даниил Полозов 4 лет назад Просмотров:
1 4.2 Работа 9 Статические характеристики синхронного двигателя при питании от преобразователя частоты Цель работы Изучение режимов работы двигателя (двигательного, рекуперации), экспериментальное исследование статических (механических, электромеханических, регулировочных, U-образных) и динамических характеристик двигателя при питании от регулируемого преобразователя (при изменении амплитуды и частоты напряжения на статоре, при изменении тока обмотки возбуждения). 1 Порядок выполнения работы 1.1 Ознакомиться с электрооборудованием лабораторной установки. Изучить описание стенда. 1.2 Выполнить предварительный расчет механических характеристик и параметров системы, обеспечивающих работу в заданной точке. 1.3 Настроить систему электропривода для выполнения исследований. 1.4 При неизменном напряжении задания UВХ = const и токе возбуждения iв = const снять статические характеристики электропривода в двигательном и генераторном режимах при изменении момента на валу двигателя М ω, ICЕТИ, I1, UФ, P1, S1= f (М) Повторить п. 1.4 для трех значений тока возбуждения iв Повторить п. 1.4 для трех значений напряжения задания UВХ. 1.5 При неизменном напряжении задания UВХ = const и постоянстве момента на валу двигателя М = const снять U образные статические характеристики электропривода при изменении тока возбуждения iв I1, UФ, P1, S1= f (iв) для трех значений момента двигателя. 1.6 По результатам предыдущих пунктов рассчитать и построить энергетические характеристики электропривода: КПД электропривода; коэффициент мощности. 1.7 Собрать схему динамического торможения СД. Снять механические ω = f(m) и электромеханические ω = f (I 1 ) характеристики двигателя для двух значений тока возбуждения. Внимание! Не допускать превышение тока статора более 10 А. 95
2 1.8 Рассчитать энергетические диаграммы для двигательного режима и режима рекуперации. 1.9 Оформить отчет по проделанной работе. 2 Пояснения к работе 2.1 Принципиальная схема установки Схема подключений силовых цепей синхронного электропривода приведена на рисунке 23. Преобразователь частоты (модуль А7) представляет собой трёхфазный автономный инвертор с неуправляемым выпрямителем на входе. Преобразователь подключается к сети контактором КМ1. В стенде 2 для рассеивания электрической энергии в генераторном режиме исследуемой машины резисторы RQ1, RQ2, RQ3 собираются последовательно и подключаются к клеммам DC2, BR. В стенде 6 резисторы в стенде отсутствуют. Статорные обмотки двигателя собираются по схеме звезда (клеммы XS2, XS4, XS6 объединяются, модуль А15) и подключаются к преобразователю частоты UZ1 (клемма U, V, W, модуль А7, см. рисунок 23). Внимание! При подключении обмоток к преобразователю частоты строго соблюдать фазировку! Обмотка возбуждения LM1 подключается к возбудителю (двухзвенному преобразователю, работающему в режиме источника тока). Ток возбуждения задаётся потенциометром RP1 (модуль А13, см. рисунок 23). Нагрузочное устройство включается контактором КМ2. Управление преобразователем частоты осуществляется с установленной непосредственно на нем кнопочной панели. О работе с кнопочной панелью данного преобразователя частоты можно подробнее ознакомиться в приложении Е. 2.2 Предварительное домашнее задание По данным двигателя (см. приложение Л) рассчитать и построить угловую, механическую и электромеханическую характеристики синхронного двигателя при U С = 100 В. Падением напряжения в обмотках статора можно пренебречь. 2.3 Настройка системы электропривода Собрать схему силовых цепей синхронного электропривода (рисунок 23). Подключение схемы электропривода к источникам напряжения производится в следующей последовательности: включается вводной автоматический выключатель QF, расположенный на боковой стенке стенда; автоматическим выключателем QF1 выполняется подача напряжения на цепи управления стенда; контактором КМ2 включается нагрузочное устройство. 96
3 Рисунок 23 Схема соединений для исследования синхронного электродвигателя 97
4 2.3.2 Установив тумблер SA1 «Разрешение» (модуль А7) в нижнее положение, подать напряжение питание на силовые цепи преобразователя частоты UZ1 контактором КМ1 (кнопкой ПУСК модуля А3) Подать напряжение на силовые цепи возбудителя. Для этого переключатель «СЕТЬ» (модуль А13) перевести в верхнее положение; установить ток возбуждения потенциометром RP1 (модуль А13), ограничив его допустимым по нагреву током обмотки возбуждения при неподвижном роторе 9 А. Внимание! При прекращении лабораторных исследований или при перерыве на оформление экспериментальных данных обязательно снижать ток возбуждения до 1-2 А Проверить функционирование преобразователя частоты UZ1. Провести пробную автонастройку электропривода, для этого в параметр 5.12 записать значение 2 и разрешить работу привода тумблером SA1 и кнопкой разрешения работы. При успешном окончании автонастройки значение 2 в параметре 5.12 сбросится на нулевое и привод будет готов к работе. При появлении сообщения «tune2» изменить фазировку подключения фаз статора. Повторить автонастройку. При успешном окончании второй автонастройки привод будет готов к работе. При появлении сообщения об ошибке при автонастройке сообщить преподавателю. После окончания автонастройки запустить электропривод, изменяя заданное значение скорости вращения синхронного двигателя с кнопочной панели. 2.4 Исследование системы электропривода В настроенной системе электропривода при неизменной заданной скорости вращения, и токе возбуждения iв = const экспериментально снять и построить в функции момента на валу двигателя МВ = var следующие статические характеристики электропривода: скорости вращения синхронного двигателя n = f (М); тока, потребляемого электроприводом из сети, I C = f (М); тока фазы статора двигателя I Ф = f (М); напряжения (фазного) на статоре двигателя U Ф = f (М); активной мощности, потребляемой статором, P 1 = f (М); полной мощности, потребляемой статором, S 1 = f (М). Характеристики снимаются в двигательном и генераторном режимах. Внимание! При работе на стенде 6 ввиду отсутствия сливных сопротивлений характеристики снимать только до точки идеального холостого хода. Напряжение сети, токи и мощности, потребляемые из сети, регистрируются измерителем мощности (модуль А2). Для измерения напряжения, приложенного к двигателю, тока и мощности статора используются соответствующие параметры преобразователя частоты Повторить п для заданного преподавателем значения тока возбуждения. 98
5 2.4.3 Повторить п для заданного преподавателем значения скорости вращения В настроенной системе электропривода при неизменном статическом моменте нагрузки МС = сonst (величина задаётся преподавателем), и токе возбуждения iв = const экспериментально снять и построить в скорости на валу двигателя следующие статические характеристики электропривода: тока, потребляемого электроприводом из сети, I C = f (ω); тока фазы статора двигателя I Ф = f (ω); напряжения (фазного) на статоре двигателя U Ф = f (ω); активной мощности, потребляемой статором, P 1 = f (ω); полной мощности, потребляемой статором, S 1 = f (ω) В настроенной системе электропривода при моменте статической нагрузки МС = сonst (величина задаётся преподавателем) и сигнале задания скорости = сonst, изменяя только ток возбуждения iв = var, экспериментально снять и построить следующие статические характеристики электропривода: скорости вращения двигателя n = f (i В ); тока статора двигателя I С = f (i В ); напряжения на статоре двигателя U C = f (i В ); активной мощности, потребляемой статором, P 1 = f (i В ); полной мощности, потребляемой статором, S 1 = f (i В ) По результатам предыдущих пунктов рассчитать и построить энергетические характеристики электропривода: КПД электропривода; коэффициент мощности. 3 Содержание отчета 3.1 Привести функциональную схему лабораторной установки, силовые цепи выделить жирными линиями. 3.2 Представить предварительные расчеты. 3.3 Привести таблицы результатов экспериментов, расчетные формулы и результаты расчетов КПД и коэффициента мощности. 3.4 Представить статические характеристики рассмотренных систем на одном рисунке. Для анализа особенностей систем и их основных показателей необходимо одноименные зависимости систем размещать на одном рисунке, однако число кривых должно быть не более шести. 3.5 На основе экспериментальных данных рассчитать и построить энергетические диаграммы двигателя. 3.6 На основе экспериментальных данных (для каждой из исследованных схем) рассчитать и построить энергетические диаграммы двигателя при работе его в разных режимах. 99
6 3.7 Для каждой энергетической диаграммы необходимо указать режим работы двигателя, опытные значения этого режима (токи, момент, скорость и т.п.). Привести расчеты составляющих энергетических диаграмм: активную мощность, потребляемую из сети (отдаваемую в сеть); мощность потерь в обмотке статора; мощность потерь в добавочных сопротивлениях статора; мощность потерь в стали статора (определяется в точке синхронной скорости ω О и принимается постоянной при неизменном напряжении сети U 1 ); электромагнитную мощность; мощность потерь в роторе; мощность на валу двигателя; мощность механических потерь и потерь в стали ротора; КПД η; коэффициент мощности cos φ1. На графиках энергетических диаграмм их составляющие необходимо показать с соблюдением масштаба. 3.8 В выводах по работе оценить особенности СД по сравнению с другими типами двигателей. Контрольные вопросы 1 Какой характер момента на валу обеспечивает нагрузочное устройство? 2 Как изменится скорость двигателя, если при наличии момента на валу отключить преобразователь от сети? 3 Каковы предельные значения момента, тока статора и скорости вращения синхронного двигателя лабораторной установки? 4 По каким признакам можно оценить, что синхронный двигатель втянулся в синхронизм? 5 По каким приборам можно определить, что двигатель работает в режиме идеального холостого хода? 6 Как обеспечивается режим рекуперативного торможения синхронного двигателя? 7 Как зависит момент синхронного двигателя от напряжения питающей сети? 8 Как зависит момент синхронного двигателя от тока возбуждения двигателя? 9 Как зависит ток статора и cosφ двигателя от тока возбуждения при постоянной нагрузке на его валу? 10 Как в схеме лабораторного стенда снять неустойчивый участок пусковой механической характеристики двигателя? 100
1.7 Снять статические характеристики п. 1.4 при номинальном напряжении UТП =UН =const, закороченном добавочном сопротивлении в цепи якоря RQ = 0
 2.2 Работа 1 Статические характеристики двигателя независимого возбуждения Цель работы Изучение режимов работы двигателя (двигательного, рекуперации, торможения противовключением, динамического торможения),
2.2 Работа 1 Статические характеристики двигателя независимого возбуждения Цель работы Изучение режимов работы двигателя (двигательного, рекуперации, торможения противовключением, динамического торможения),
Лекция №5 Электромеханические характеристики синхронных электродвигателей
5.1 Принцип работы синхронного двигателя
Для нерегулируемых электроприводов большой мощности (свыше 160кВт) широко применяются синхронные электродвигатели с электромагнитным возбуждением. Схема включения такого двигателя показана на рис.3.23.
Конструкция статора синхронного двигателя аналогична конструкции статора асинхронного двигателя. Токи, протекающие по трехфазной обмотке статора, создают намагничивающие силы, результирующий вектор которых образует вращающееся в пространстве электромагнитное поле статора Ф,. Скорость вращения поля статора равна согласно (3.3)
и является рабочей скоростью синхронного двигателя.
На роторе синхронного двигателя расположена обмотка возбуждения, которая питается постоянным током от независимого регулируемого источника напряжения — возбудителя. Ток возбуждения создает электромагнитное поле Ф0, неподвижное относительно ротора и вращающееся в установившемся режиме вместе с ротором со скоростью а>0. Магнитные силовые линии поля ротора сцепляются с вращающимся синхронно с ним электромагнитным полем статора. Взаимодействие полей статора и ротора создает электромагнитный момент на валу синхронной машины.
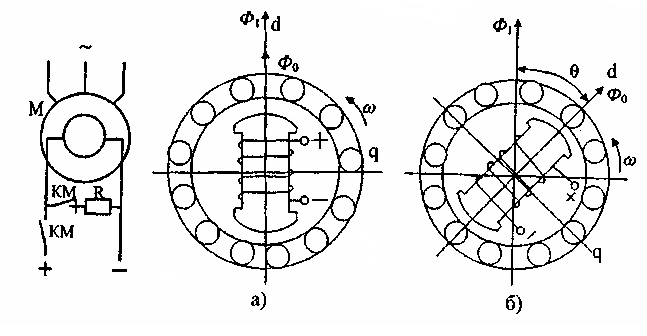
Рис.3.23. Схе- Рис.3.24. Пространственные векторы электро-
ма включения магнитных полей синхронного двигателя
синхронного а) идеальный холостой ход;
двигателя б) при нагрузке на валу
При отсутствии нагрузки векторы поля статора Ф1 и поля ротора Ф совпадают в пространстве (см. рис.3.24,а) и совместно вращаются со скоростью ω. При появлении на валу двигателя момента сопротивления векторы Ф1, и Ф расходятся (как бы растягиваются подобно пружине) на угол θ, называемый углом нагрузки, причем, если вектор Ф отстает от вектора Ф1 (см. рис. 3.24,6), то синхронная машина работает в двигательном режиме и электромагнитный момент на ее валу положителен. Если синхронная машина работает генератором, приводимым во вращение первичным двигателем, то вектор поля ротора опережает вектор поля статора на угол (–θ ) и электромагнитный момент на валу машины отрицателен. Изменению нагрузки на валу машины соответствует изменение угла θ. Образно это соответствует растяжению-сжатию пружины. Максимальный момент Ммакс будет иметь место при θ – π/2 . Если нагрузка на валу машины будет больше Ммахс, то синхронный режим нарушается и машина выпадает из синхронизма.
Механическая характеристика синхронной машины представляют собой прямую, параллельную оси абсцисс и ограниченную значениями момента ± Ммакс (рис.3.25). Жесткость механической характеристики равна бесконечности.
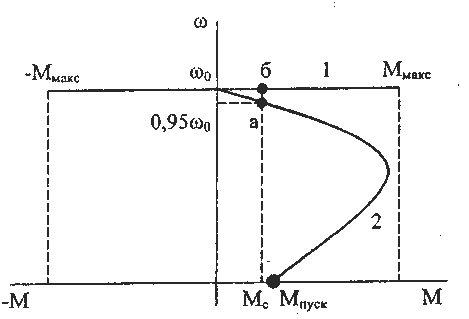
Рис.3.25. Механические характеристики синхронного двигателя
1 — характеристика синхронного режима
2 — пусковая характеристика (асинхронный режим)
Поскольку ротор двигателя вращается с синхронной скоростью и скольжение отсутствует, то вся мощность электромагнитного поля статора Рэм преобразуется в механическую мощность на валу синхронного двигателя. Если пренебречь потерями в статоре, то Рэм = 3U1I1 соsφ = Мω, откуда
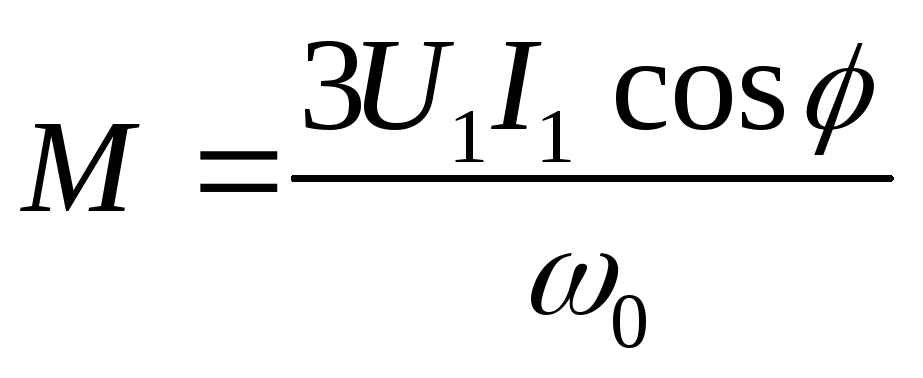 (3.39)
(3.39)
Рассмотрим векторную диаграмму неявнополюсной синхронной машины (рис. 3.26). Двигатель с неявнополюсным ротором имеет симметричную в магнитном отношении конструкцию. Пренебрегая активным сопротивлением статора, получим Ů1 – Ė1 = jI1x1.
Здесь Е, – э.д.с., наводимая в обмотках статора вращающимся вместе с ротором полем Ф.
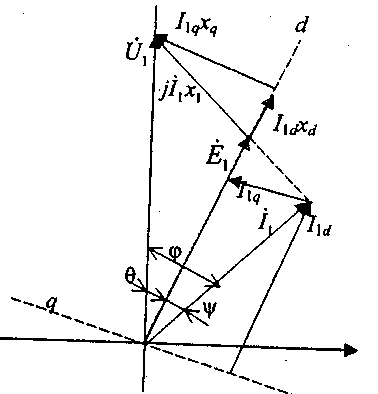
Рис.3.26. Векторная диаграмма синхронного двигателя
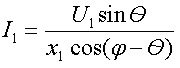
Из векторной диаграммы следует:
U1 sin θ = I1x1 cos (φ – θ)
U1cos φ = E1 cos(φ – θ)
Подставляя эти значения в (3.39), получим выражение для угловой характеристики неявнополюсной синхронной машины
 (3.40)
(3.40)
Из этого выражения и соответствующей ему угловой характеристики (рис.3.27) следует, что по мере нагружения синхронной машины угол нагрузки увеличивается и момент достигает максимума при θ = π/2. Для сохранения постоянной перегрузочной способности двигателя предусматривается автоматическое увеличение тока возбуждения при приложении ударной нагрузки или снижении величины питающего напряжения.
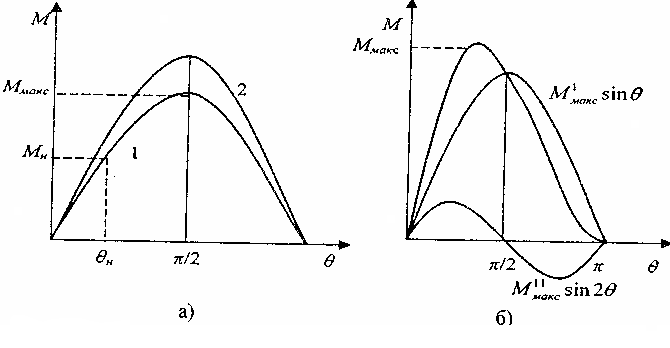
Рис.3.27. Угловая характеристика синхронного двигателя:
а) неявнополюсной машины; б) явнополюсной машины
1 — при номинальном потоке возбуждения;
2 — при форсировке возбуждения
Для синхронного двигателя явнополюсной конструкции, который имеет несимметричную магнитную цепь, кроме момента, вызванного полем ротора, возникает реактивный момент, определяемый стремлением ротора занять такое положение, при котором магнитная проницаемость для пути потока статора была бы максимальной. Угловая характеристика (см. рис.3.27,б) для такого двигателя описывается уравнением:
 +
+ 
где хd и хq – индуктивное сопротивление по продольной и поперечной осям.
Электромеханические свойства синхронных двигателей
Синхронные двигатели, как правило, исполняются с явнополюсным ротором, на котором размещается обмотка возбуждения. Питание обмотки возбуждения осуществляется через контактные кольца от источника постоянного напряжения, а трехфазная обмотка статора подключается к сети переменного тока, как показано на рис.3.46,a. Двухфазная модель такой машины представлена схемой на рис.3.46,б. Здесь обмотки фаз статора питаются симметричной двухфазной системой напряжений

Обмотка возбуждения размещена на оси d явнополюсного ротора и подключена к источнику постоянного напряжения ив. Уравнения электромеханической характеристики, записанные для реальных переменных в осях а, р, d, q, имеют вид
 Особенностью рассматриваемого двигателя является синхронное вращение ротора с вращающимся полем статора. При работе в двигательном режиме ротор отстает от поля статора на угол qЭЛ=j0эл-jэл=w0эл·t-jэл, поэтому наиболее удобный для анализа вид уравнения механической характеристики имеют в осях d, q. Вначале преобразуем напряжения u1a, м1b к осям d, q с помощью формул прямого преобразования (2.15):
Особенностью рассматриваемого двигателя является синхронное вращение ротора с вращающимся полем статора. При работе в двигательном режиме ротор отстает от поля статора на угол qЭЛ=j0эл-jэл=w0эл·t-jэл, поэтому наиболее удобный для анализа вид уравнения механической характеристики имеют в осях d, q. Вначале преобразуем напряжения u1a, м1b к осям d, q с помощью формул прямого преобразования (2.15):


Подставив преобразованные выражения напряжений в (3.113) и дополнив эту систему уравнением электромагнитного момента, получим уравнения механической характеристики синхронного двигателя в осях d, q:
Схема синхронного двигателя в осях d, q представлена на рис.3.46,в. В соответствии с этой схемой записываем уравнения потокосцеплений, учитывая, что вследствие явнополюсности ротора 

Уравнения (3.114) нелинейны в связи с наличием произведений переменных, поэтому для строгого анализа динамических режимов синхронного двигателя следует использовать цифровые или аналоговые вычислительные машины. Приближенное уравнение динамической механической характеристики может быть найдено с помощью угловой статической характеристики двигателя, для получения которой положим в (3.114) d/dt=0 и wэл=w0эл, пренебрежем активным сопротивлением статора R1»0, примем, что обмотка возбуждения получает питание от источника тока и во всех режимах iв=-Iв=const, при этом система (3.114) примет вид
Из первого и второго уравнений (3.116) определяются токи статора:

Подставляя выражения токов в третье уравнение (3.116) и учитывая, что L12dIB=Emах/w0эл, после преобразований получаем уравнение угловой характеристики двухфазного явнополюсного синхронного двигателя в виде

Произведем замену переменных двухфазной машины переменными трехфазной с помощью (2.37) и перейдем к эффективным значениям ЭДС и напряжения. В результате получим известное уравнение угловой характеристики трехфазного явнополюсного синхронного двигателя:

Уравнение (3.118) свидетельствует о том, что электромагнитный момент синхронного двигателя состоит из двух составляющих, первая из которых обусловлена взаимодействием вращающегося поля статора с полем возбужденного ротора, а вторая представляет собой реактивный момент, обусловленный явнополюсным исполнением ротора. Вследствие явнополюсности энергия магнитного поля максимальна при любом из двух возможных соосных с полем статора положений ротора, что и определяет зависимость реактивного момента от двойного угла qэл.
Примерный вид угловой характеристики М=f(qэл) показан на рис.3.47,а. Рассматривая ее, можно убедиться, что увеличение угла qэл вызывает рост электромагнитного момента вначале в зависимости, близкой к линейной. При qЭЛ> 45° темп нарастания момента быстро снижается, и после достижения максимума Мmах дальнейшее возрастание угла q влечет за собой уменьшение момента двигателя. Без учета явнополюсности ротора максимум момента наступает при qЭЛ=90°.
 В номинальном режиме работы, когда двигатель развивает номинальный электромагнитный момент Мном, угол qэл обычно составляет qЭЛном=20¸30°. Этим обстоятельством определяется перегрузочная способность синхронного двигателя, которая лежит в пределах l=Мтaх/Мном=2¸3. Рассмотрение рис.3.47,а,б позволяет заключить, что реактивный момент увеличивает крутизну рабочего участка угловой характеристики и несколько повышает перегрузочную способность двигателя.
В номинальном режиме работы, когда двигатель развивает номинальный электромагнитный момент Мном, угол qэл обычно составляет qЭЛном=20¸30°. Этим обстоятельством определяется перегрузочная способность синхронного двигателя, которая лежит в пределах l=Мтaх/Мном=2¸3. Рассмотрение рис.3.47,а,б позволяет заключить, что реактивный момент увеличивает крутизну рабочего участка угловой характеристики и несколько повышает перегрузочную способность двигателя.
Перегрузочная способность синхронного двигателя менее чувствительна к понижению напряжения сети, чем у асинхронного двигателя, что относится к числу его важных достоинств. Этот вывод следует непосредственно из (3.118), если учесть, что реактивный синхронный момент, зависящий от квадрата напряжения, мало влияет на перегрузочную способность, а основная составляющая момента зависит от напряжения U1 линейно, так как ЭДС машины Е определяется током возбуждения Iв.
Механизм образования синхронного момента виден на рис.3.46,в. На этом рисунке обозначены все токи, определяющие направление вектора потокосцепления статора  связанного с осью вращающегося магнитного поля машины. Вектор определяется геометрической суммой потокосцеплений обмотки статора по оси d
связанного с осью вращающегося магнитного поля машины. Вектор определяется геометрической суммой потокосцеплений обмотки статора по оси d

и по оси q Y1q=L1qI1q. В соответствии с (3.117) на рисунке приведены зависимости токов I1d и I1q от угла qэл Рассматривая рисунок, можно установить, что при идеальном холостом ходе I1q=0 и вектор совпадает с осью ротора d. Под нагрузкой ось ротора d и составляющая вектора потокосцепления Y1d, которая в основном определяется током возбуждения, отстают от оси вращающегося магнитного поля, определяемой положением вектора на угол qЭЛ. Между постоянным магнитом, которым является возбужденный ротор, и вращающимся магнитным полем возникают силы взаимодействия. При малых углах qЭЛ эти силы при увеличении qЭЛ возрастают по закону, близкому к линейному. Нетрудно видеть, что рассмотренное электромагнитное взаимодействие вполне подобно механической упругой связи между полем ротора и результирующим полем машины. Поэтому по главным динамическим свойствам синхронный двигатель подобен упругим механическим системам.
Рабочий участок угловой характеристики М=f(qэл) можно с достаточной для многих задач инженерной практики точностью заменить линейной зависимостью М=kqэл, проходящей через точку номинального режима:

где сэм — коэффициент жесткости упругой электромагнитной связи двигателя.
Дифференцируя (3.119), получаем приближенное уравнение динамической характеристики:

Как было установлено в гл. 1, момент упругого взаимодействия М12 в двухмассовой линейной упругой системе
Дифференцирование этой зависимости дает уравнение, совпадающее по форме с (3.120), что еще раз подтверждает аналогию между электромагнитными взаимодействиями в синхронном двигателе и механическими в механической пружине. Этим определяется повышенная склонность синхронного двигателя к колебаниям, для устранения (или снижения) которой реальные синхронные двигатели снабжаются демпферной (пусковой) короткозамкнутой обмоткой. Эта обмотка выполняется в виде беличьей клетки на полюсах ротора и при возникновении колебаний скорости ротора, т. е. скольжения, создает асинхронный момент. Пренебрегая влиянием электромагнитной инерции на асинхронный момент, результирующий момент синхронной машины в динамических процессах можно приближенно представить в виде суммы синхронного Мсин и асинхронного моментов Мас:

где 
С учетом (3.120) уравнение механической характеристики синхронного двигателя в операторной форме примет окончательный вид

Структурная схема электромеханического преобразования энергии, соответствующая (3.122), представлена на рис.3.48,а. При р=0 из (3.122) получаем уравнение статической механической характеристики w=w=const. Следовательно, в статическом виде изменения нагрузки на валу двигателя не приводят к изменениям скорости, так как модуль статической жесткости равен бесконечности. Это справедливо лишь в пределах перегрузочной способности двигателя, определяемой угловой характеристикой на рис.3.47,д. При возрастании нагрузки до значений, превышающих Мmax=lМНОМ, двигатель выпадает из синхронизма. Статическая механическая характеристика синхронного двигателя соответственно имеет вид, показанный на рис.3.47,б (прямая 1).
В динамических режимах механическая характеристика синхронного двигателя, как следует из (3.122), не является абсолютно жесткой. В установившемся динамическом режиме вынужденных колебаний изменениям момента с амплитудой DМmах и соответствующим изменениям угла qэл по (3.122) соответствуют определенные амплитуды Dwmах колебаний скорости и динамическая механическая характеристика имеет вид эллипса (рис 3.47,б, кривая 2). Передаточная функция динамической жесткости определяется по рис.3.48,а:

Соответственно АФХ, АЧХ и ФЧХ динамической жесткости определяются соотношениями

 Логарифмические частотные характеристики динамической жесткости представлены на рис.3.48,б. Низкочастотная асимптота ЛАЧХ динамической жесткости имеет наклон -20 дБ/дек, поэтому модуль жесткости характеристики синхронного двигателя при возрастании частоты быстро убывает, стремясь к значению, определяемому жесткостью рабочего участка асинхронной характеристики M=f(w), а фазовый сдвиг y(W) изменяется от –3p/2 до -p.
Логарифмические частотные характеристики динамической жесткости представлены на рис.3.48,б. Низкочастотная асимптота ЛАЧХ динамической жесткости имеет наклон -20 дБ/дек, поэтому модуль жесткости характеристики синхронного двигателя при возрастании частоты быстро убывает, стремясь к значению, определяемому жесткостью рабочего участка асинхронной характеристики M=f(w), а фазовый сдвиг y(W) изменяется от –3p/2 до -p.
Частотные характеристики динамической жесткости свидетельствуют о том, что соответствующая статическим режимам абсолютно жесткая характеристика синхронного двигателя для анализа динамических процессов неприменима. Динамические механические характеристики, соответствующие даже сравнительно медленным изменениям момента двигателя, могут существенно отличаться от статических.
Важным достоинством синхронного двигателя является возможность регулирования реактивной мощности путем воздействия на ток возбуждения Iв. Выражение для тока 11d (3.117) свидетельствует о том, что при прочих равных условиях этот ток и его знак определяются током возбуждения Iв, которому пропорциональна при принятых для обобщенной машины допущениях ЭДС Еmax. Ток I1q не зависит от тока возбуждения, поэтому влияние возбуждения двигателя на условия преобразования энергии можно проанализировать с помощью векторных диаграмм, соответствующих системе (3.116) при qЭЛ=const, представленных на рис.3.49.
 При относительно небольшом токе возбуждения Emax
При относительно небольшом токе возбуждения Emax
 studopedia.org — Студопедия.Орг — 2014-2021 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.004 с) .
studopedia.org — Студопедия.Орг — 2014-2021 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.004 с) .
Электрооборудование торфопредприятий — Электромеханические свойства трехфазных синхронных электродвигателей
Содержание материала
- Электрооборудование торфопредприятий
- Электроприводы
- Уравнения электропривода
- Характеристики электроприводов
- Свойства электродвигателей
- Свойства трехфазных двигателей
- Регулирование скорости асинхронных
- Свойства синхронных двигателей
- Свойства последовательного возбуждения
- Свойства смешанного возбуждения
- Специальные электроприводы
- Выбор электродвигателей
- Выбор электродвигателей 2
- Аппараты до 1000 В
- Контакторы и пускатели
- Командные аппараты
- Электромагниты
- Реле
- Плавкие предохранители
- Автоматические выключатели
- Станции управления
- Управление электроприводами
- Схемы управления электроприводами
- Электробезопасность
- Повышение электробезопасности
- Механическая переработка
- Машины фрезерного торфа
- Погрузочные машины
- Электроприводы механизмов
- Электроприводы сушильных
- Электроприводы торфобрикетных
- Электрификация транспорта
- Электрооборудование насосных
- Электроснабжение торфопредприятий
- Электрооборудование ТП
- Распределительные устройства
- Схемы и конструкции ТП
- Передвижные ДЭС
- Электрические сети
- Рационализация электропотребления
- Эксплуатация и ремонт
Синхронные электродвигатели относят к группе практически нерегулируемых. Они применяются главным образом для приводов средней и большой, мощности, не требующих регулирования скорости вращения, например для приводов компрессоров, насосов, вентиляторов.

Рис. 3-20. Механическая характеристика (а) и угловая характеристика (б) синхронного электродвигателя.
Преимуществом синхронного электродвигателя является возможность работы с коэффициентом мощности, равным единице и даже с опережающим током, что позволяет осуществлять компенсацию реактивной отстающей мощности электроприемников. Синхронные электродвигатели стоят дороже асинхронных. Целесообразность их применения оправдывается экономичностью, получаемой от компенсации реактивной мощности.
В синхронном электродвигателе скорость вращения остается строго постоянной, не зависящей от нагрузки и величины тока возбуждения. Поэтому механическая характеристика синхронного электродвигателя ω=f(Mд) представляет прямую, параллельную оси моментов (рис. 3-20, а). Такая механическая характеристика называется абсолютно жесткой.
В работе электроприводов с синхронными электродвигателями большое значение имеют так называемые угловые характеристики синхронного электродвигателя, которые представляют собой зависимость электромагнитного момента электродвигателя от угла сдвига оси полюсов ротора и полюсов вращающегося поля статора (угол сдвига вектора напряжения статора относительно вектора э. д. с., индуктированной к обмотке статора полем ротора). Эта
зависимость имеет характер синусоиды (рис. 3-20, б), которая подчиняется уравнению  (3-24
(3-24
При холостом ходе оси полюсов ротора и поля статора совпадают: угол 0=0 и Мд=0. При увеличении нагрузки угол 0 возрастает, соответственно будет возрастать и момент электродвигателя. Максимальное значение момента Ммакс наступает при 0=90°. По мере дальнейшего возрастания угла 0 момент начнет уменьшаться, что соответствует выпадению электродвигателя из синхронизма и его остановке. Поэтому устойчивая работа электродвигателя возможна при углах 0, не превышающих 90°. Учитывая возможные толчки нагрузки, обычно угол, соответствующий номинальной нагрузке, принимается равным 0„ =25—30 эл-град. При этом перегрузочная способность электродвигателя составит 
Момент синхронного электродвигателя пропорционален первой степени напряжения, поэтому электродвигатель менее чувствителен к колебаниям напряжения сети, чем асинхронный. Перегрузочную способность синхронного электродвигателя в эксплуатационных условиях можно повысить увеличением тока возбуждения. Это позволяет электродвигателю работать устойчиво при резких бросках нагрузки и при значительном снижении напряжения не выпадать из синхронизма.
Для синхронного электродвигателя принципиально возможны все три способа торможения: рекуперативное, динамическое и противовключением. Практически используется только динамическое торможение. Рекуперативное торможение не применяется, так как при этом нельзя получить снижения скорости. Режим противовключения возможен, но в этом случае электродвигатель работает в асинхронном режиме, потребляя из сети большой ток. Так как пусковая (асинхронная) обмотка электродвигателя рассчитана на кратковременную работу и длительное протекание по ней больших токов недопустимо, то такое торможение нежелательно.
При динамическом торможении синхронного электродвигателя к кольцам ротора подается постоянный ток, а обмотка статора замыкается на сопротивление. Механические характеристики синхронного электродвигателя в этом режиме будут подобны характеристикам асинхронного электродвигателя при динамическом торможении.
Пуск синхронного электродвигателя, как правило, осуществляется аналогично асинхронному. Для этой цели на роторе, кроме обмотки возбуждения, имеется короткозамкнутая пусковая обмотка: Пусковая обмотка имеет небольшой объем и рассчитана на несколько пусков, поэтому длительная работа электродвигателя в асинхронном режиме недопустима.
Процесс пуска синхронного электродвигателя происходит вначале как у асинхронного, при отключенном возбудителе (рис. 3-21, а). При достижении скорости, близкой к синхронной (95—98% от нее), которую часто называют «подсинхронной», в обмотку возбуждения подается постоянный ток и электродвигатель входит в синхронизм.

Рис. 3-21. Схема подсоединения обмотки ротора синхронного электродвигателя к якорю возбудителя: а — через добавочное активное сопротивление (ДС); б — непосредственное (глухое подключение).
В процессе пуска обмотку возбуждения электродвигателя замыкают при помощи размыкающего контакта контактора К (рис. 3-21, а) на активное сопротивление ДС, в 10—12 раз большее сопротивления самой обмотки. Сопротивление ДС играет ту же роль, что и пусковой реостат в асинхронном электродвигателе с фазным ротором: оно уменьшает ток при пуске в обмотке возбуждения и увеличивает пусковой (входной) момент.
В зависимости от мощности питающей системы возможен прямой пуск электродвигателя или пуск при пониженном напряжении с применением реактора или автотрансформатора.
Применяется также пуск синхронных электродвигателей с возбудителем, глухо соединенным с обмоткой возбуждения (рис. 3-21, б). Такой способ пуска применим для электроприводов, пускаемых вхолостую или с малой нагрузкой (приводы насосов, вентиляторов, компрессоров, дробилок, шаровых мельниц и др.). В конце процесса пуска напряжение возбудителя возрастает и обмотка ротора оказывается включенной на его полное напряжение.
При пуске с подключенным наглухо возбудителем управление синхронным электродвигателем становится таким же простым, как и управление асинхронным электродвигателем с короткозамкнутым ротором. Это позволяет более широко применять синхронные электродвигатели в практике нерегулируемых электроприводов.
Регулирование скорости электродвигателей независимого возбуждения.
Из уравнения скоростной характеристики электродвигателя следует, что возможны три основных способа регулирования скорости электродвигателя: изменением сопротивления в цепи якоря, изменением потока возбуждения, изменением напряжения, подводимого к якорю.
Регулирование скорости изменением сопротивления в цепи якоря осуществляется путем введения добавочного сопротивления в цепь якоря. При увеличении сопротивления наклон характеристики электродвигателя возрастает, и при том же моменте сопротивления Мc скорость будет уменьшаться (рис. 3-28).

Рис. 3-28. Искусственные (реостатные) механические характеристики электродвигателя независимого возбуждения при различных сопротивлениях в цепи якоря.

Рис. 3.29. Механические характеристики электродвигателя независимого возбуждения при регулировании скорости ослаблением магнитного потока.
Полученные искусственные характеристики носят название реостатных. При нагрузке, равной нулю, реостатные характеристики имеют общую точку, равную скорости идеального холостого хода.
Недостаток данного способа регулирования — большие потери энергии в регулировочном реостате, его большие габариты и вес. Реостат также должен быть рассчитан на длительный рабочий ток электродвигателя.
Регулирование скорости изменением магнитного потока достигается введением добавочного сопротивления — регулировочного реостата — в цепь обмотки возбуждения. В этом случае магнитный поток будет уменьшаться, а скорость электродвигателя возрастать (по отношению к номинальной). При изменении магнитного потока меняются как скорость идеального холостого хода ω0, так и перепад скорости Δω (рис. 3-29).
Электродвигатели нормального исполнения можно регулировать «вверх» на 25—30% выше номинальной скорости (условия безыскровой коммутации); в электродвигателях специального исполнения скорость может повышаться в 3—4 и даже в 8 раз против номинальной.
К достоинствам данного способа относятся сохранение жесткости механических характеристик при изменении нагрузки и его экономичность, поскольку потери энергии на нагревание реостата невелики ввиду малой величины тока возбуждения — всего 2—5% от тока якоря. Такой способ регулирования целесообразно применять там, где с увеличением скорости допустимый статический момент уменьшается, т. е. для электроприводов, работающих при Р = const.

Рис. 3-30. Система генератор—электродвигатель (Г-Д),
Регулирование скорости изменением напряжения, подводимого к якорю, может быть осуществлено: от отдельного управляемого генератора (система носит название генератор — двигатель, или сокращенно Г—Д); от управляемого выпрямителя, выполненного на базе ионных приборов (ртутных выпрямителей, тиратронов) или тиристоров; от магнитного усилителя и полупроводниковых выпрямителей.
На рис. 3-30 приведена система Г—Д, которая состоит из следующих машин: АД — асинхронный (или синхронный) электродвигатель; вращающий генератор Г; возбудитель В; Д — электродвигатель рабочей машины; РМ — рабочая машина.
Электродвигатель Д в этой системе получает питание от генератора постоянного тока, напряжение на зажимах которого изменяется вниз от номинального, что приводит к уменьшению скорости вращения электродвигателя. Для получения скорости выше номинальной и, следовательно, расширения диапазона регулирования скорости используется способ ослабления магнитного потока электродвигателя.
Диапазон регулирования скорости в системе Г—Д составляет примерно 1:20 (30). В специальных схемах Г—Д диапазон регулирования может достигать значений 1:100 и выше.
В системе Г—Д при изменении подводимого к электродвигателю напряжения меняется только скорость ω0, а перепад скорости остается неизменным, поэтому механические характеристики для различных напряжений будут параллельными (рис. 3-31).
Система Г—Д находит широкое применение в регулируемых электроприводах с большим диапазоном регулирования скорости (прокатные станы, экскаваторы, металлорежущие станки). Несмотря на большие капитальные затраты (установленная мощность электрических машин несколько больше трех номинальных мощностей рабочего электродвигателя) и низкий к.п.д. установки, система окупает себя за счет увеличения производительности, экономии в электрических аппаратах управления, простоты операций пуска, реверсирования и торможения.
Существенным недостатком системы Г—Д является наличие трехмашинного преобразовательного агрегата, который требует больших капитальных вложений, усложняет эксплуатацию, занимает значительную площадь. По этой причине вместо вращающихся преобразователей используют статические преобразователи: ионные устройства (тиратроны, управляемые ртутные выпрямители) и магнитные усилители. В последнее время для этой цели начинают находить применение кремниевые управляемые вентили (КУВ) — тиристоры, которые по своим функциям в схемах преобразователей аналогичны тиратронам и ртутным управляемым выпрямителям.

Рис. 3-31. Механические характеристики системы Г—Д при регулировании скорости изменением напряжения питающего генератора.
Пуск электродвигателей независимого возбуждения. Возможны три способа пуска: непосредственным включением в сеть, изменением сопротивления в якорной цепи и изменением напряжения, подводимого к якорю.
Пуск электродвигателя непосредственным включением в сеть или прямой пуск является наиболее простым и экономичным. Однако применение его сопряжено с большими пусковыми токами, достигающими 15—20-кратной величины по отношению к номинальному току, что недопустимо по соображениям коммутации (допустимый ток не должен превышать 1,8—2,5 номинального значения). Поэтому прямой пуск электродвигателя параллельного возбуждения возможен только для электродвигателей малой мощности, у которых внутреннее сопротивление якоря имеет относительно большие значения. Этот способ пуска очень ограничен.
Наиболее простым и распространенным является пуск изменением сопротивления в якорной цепи, осуществляемый включением сопротивления пускового реостата в цепь якоря. В современном автоматизированном электроприводе выведение пусковых сопротивлений осуществляется путем замыкания ступеней пусковых сопротивлений контакторами. При ступенчатом выведении пусковых сопротивлений пусковой ток и момент колеблются в определенных заданных пределах (см. рис. 2-4).
Пуск изменением напряжения применяется главным образом в системе генератор — двигатель. При этом способе отпадает необходимость реостатного пуска рабочего электродвигателя, что при частых пусках, реверсировании и торможений позволяет значительно снизить потери энергии на нагревание сопротивлений пускового реостата.