
Элементы асинхронного двигателя на схеме
Элементы асинхронного двигателя на схеме
- Ремонт электродвигателей
- Ремонт насосов
- ПРАЙС-ЛИСТЫ
- Смазывающие покрытия Nanoprotech
- СПРАВОЧНИК
- 1. Подключение асинхронного двигателя в однофазную сеть
- 2. Допустимые значения тока холостого хода двигателей
- 3. Инструкция по эксплуатации трёхфазных электродвигателей
- Сертификаты
- Отзывы клиентов
- Карта сайта
В ООО «ГРАНАТ-ЭнергоСервис» требуется слесарь-электромонтер.
По всем вопросам звоните 225-01-08, или пишите на granat-es@mail.ru.

Друзья! ГРАНАТ-ЭнергоСервис официальный Сервисный Партнер XYLEM- насосного оборудования LOWARA и VOGEL PUMPEN.

Дорогие друзья и коллеги! Сообщаем, что мы являемся официальным сервисным партнером насосного оборудования DAB!

Уважаемые друзья и коллеги! Рады сообщить, что ГРАНАТ-ЭнергоСервис является авторизованным СервисЦентром и Дилером PEDROLLO!
Будем Вам рады помочь!



Применение конденсаторов в асинхронных двигателях
рабочий
пусковой
применение
В схемах асинхронных электродвигателей
В схемах асинхронных электродвигателей
тип подключения
Последовательно со вспомогательной обмоткой электродвигателя
Параллельно рабочему конденсатору
в качестве
Является фазосмещающим элементом
Является фазосмещающим элементом
назначение
Позволяет получить круговое вращающееся магнитное поле, необходимое для работы электродвигателя
Позволяет получить магнитное поле, необходимое для повышения пускового момента электродвигателя
время включения
В процессе работы электродвигателя
В момент пуска электродвигателя
Существуют две основные области применения конденсаторов для асинхронных электродвигателей.
1) Трёхфазный асинхронный электродвигатель, включаемый через конденсатор в однофазную сеть
В случае, когда трехфазный электродвигатель необходимо подключить к однофазной сети, существует два возможных варианта подключения: «звезда» или «треугольник», причем наиболее предпочтительным во многих случаях является вариант «треугольник».
Приблизительный расчет для данного типа соединения производится по следующей формуле:
Сраб.=k*Iф/Uсети
k – коэффициент, зависящий от соединения обмоток.
Для схемы соединения «Звезда» — k=2800
Для схемы соединения «Треугольник» — k=4800
Iф – номинальный фазный ток электродвигателя, А.
Uсети – напряжение однофазной сети, В.
Для определения пусковой емкости Сп. исходят из пускового момента. В случае если пуск двигателя происходит без нагрузки, пусковая емкость не требуется.
Для получения пускового момента, близкого к номинальному, достаточно иметь пусковую емкость, определяемую соотношением Сп.=(2.5-3) Ср.
Рабочее напряжение конденсаторов должно быть в 1,5 раза выше напряжения сети.
Схема подключения
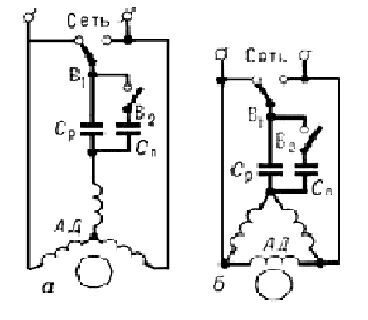
Рис 1. Схема включения в однофазную сеть трехфазного асинхронного двигателя с обмотками статора, соединенными по схеме «звезда» (а) или «треугольник» (б):
2) Асинхронный электродвигатель, питаемый от однофазной сети и имеющий на статоре две обмотки, одна из которых включается в сеть непосредственно, а другая — последовательно с электрическим конденсатором для образования вращающегося магнитного поля. Конденсаторы создают сдвиг фаз между токами обмоток, оси которых сдвинуты в пространстве. Наибольший вращающий момент развивается, когда сдвиг фаз токов составляет 90°, а их амплитуды подобраны так, что вращающееся поле становится круговым. При пуске конденсаторного асинхронного двигателя оба конденсатора включены, а после его разгона один из конденсаторов отключают. Это обусловлено тем, что при номинальной частоте вращения требуется значительно меньшая емкость, чем при пуске.
Схема подключения

Рис 2. Схема (а) и векторная диаграмма конденсаторного асинхронного двигателя:
Конденсаторный асинхронный электродвигатель по пусковым и рабочим характеристикам близок к трехфазному асинхронному двигателю.
Изображение двигателя на схеме
 Условные графические обозначения электрических машин (ГОСТ 2.722-68). Имеются три способа изображения обозначений электрических машин: упрощенный однолинейный, упрощенный многолинейный и развернутый. На рис. 1 а, б показаны упрошенные однолинейные обозначения генератора и двигателя трехфазного переменного тока, а на рис. 1в упрощенное многолинейное обозначение трехфазного асинхронного двигателя с фазным ротором, обмотка у которого соединена звездой.
Условные графические обозначения электрических машин (ГОСТ 2.722-68). Имеются три способа изображения обозначений электрических машин: упрощенный однолинейный, упрощенный многолинейный и развернутый. На рис. 1 а, б показаны упрошенные однолинейные обозначения генератора и двигателя трехфазного переменного тока, а на рис. 1в упрощенное многолинейное обозначение трехфазного асинхронного двигателя с фазным ротором, обмотка у которого соединена звездой.
Развернутые обозначения электрических машин могут изображаться в виде цепочек окружностей, расположенных с учетом сдвига фаз (рис. 1г) и без него (рис 1д). Обмотку ротора обозначают в виде окружности.
Обозначения машин постоянного тока с последовательным, параллельным и смешанным возбуждением изображены соответственно на рис. 1 е, ж, з. Якорь этих машин отображаются окружностью с соприкасающимися с ней прямоугольниками — коллекторами и щетками.
На рис. 1и . л показаны упрошенные схемы соответственно: синхронной машины трехфазного тока с обмоткой возбуждения на явнополюсном роторе и обмоткой статора, соединенной звездой, асинхронного двигателя, у которого обмотка статора соединена в треугольник, синхронной машины с возбуждением от постоянных магнитов и обмоткой статора соединенной звездой.
На рис. 1м показаны упрошенное, а на рис. 1 и развернутое обозначение поворотного трехфазного автотрансформатора (потенциал-регулятора) и на рис, 1, о, п — трехфазного поворотного трансформатора-фазорегулятора.
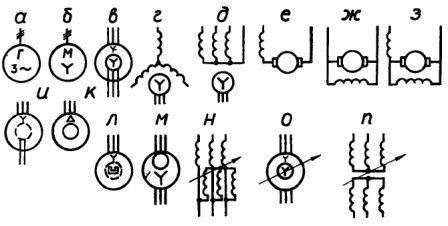
Рис. 1. Условные обозначения электрических машин на схемах
Условные графические обозначения трансформаторов и автотрансформаторов согласно ГОСТ 2.723-68 показаны на рис. 2. Так на рис. 2 а, б показаны упрошенные однолинейные обозначения трехфазных двухобмоточных трансформаторов и автотрансформаторов.
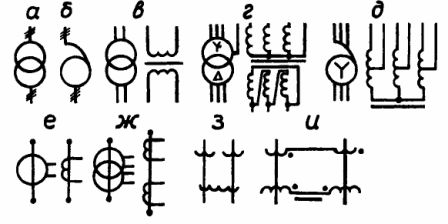
Рис. 2. Условные обозначения трансформаторов, автотрансформаторов и магнитных усилителях на схемах
Упрощенное многолинейное и развернутое обозначение однофазного двухобмоточного трансформатора показано на рис. 2 в, на рис 2 е и ж — трехфазных двухобмоточных трансформаторов и автотрансформаторов, a на рис 2 е и ж — измерительные трансформаторы с одной и двумя обмотками.
На рис. 2з и 2и приведены обозначения на схемах магнитных усилителей соответственно с двумя рабочими и обшей управляющей обмоткой, а также с двумя рабочими обмотками, включенными последовательно и обмоткой управления, состоящей из двух встречно включенных обмоток.
ГОСТ 2.722-68 ЕСКД. Обозначения условные графические в схемах. Машины электрические: скачать ГОСТ 2.722-68
Единая система конструкторской документации
ОБОЗНАЧЕНИЯ УСЛОВНЫЕ ГРАФИЧЕСКИЕ В СХЕМАХ
Unified system for design documentation. Graphic identifications in schemes. Electric machinery
МКС 01.080.40
29.160.01
Дата введения 1971-01-01
УТВЕРЖДЕН Комитетом стандартов, мер и измерительных приборов при Совете Министров СССР в декабре 1967 г. Срок введения установлен с 01.01.71
ВЗАМЕН ГОСТ 7624-62 в части разд.4
ИЗДАНИЕ (ноябрь 2007 г.) с Изменениями N 1, 2, 3, утвержденными в марте 1981 г., июле 1991 г., марте 1994 г. (ИУС 6-81, 10-91, 5-94).
1a. Настоящий стандарт устанавливает условные графические обозначения вращающихся электрических машин на схемах, выполняемых вручную или автоматизированным способом, изделий всех отраслей промышленности и строительства.
(Измененная редакция, Изм. N 1, 3).
1. Устанавливаются три способа построения условных графических обозначений электрических машин:
упрощенный многолинейный (форма I);
развернутый (форма II).
2. В упрощенных однолинейных обозначениях электрических машин обмотки статора и ротора изображают в виде окружностей. Выводы обмоток статора и ротора показывают одной линией с указанием на ней количества выводов в соответствии с требованиями ГОСТ 2.721-74.
В настоящем стандарте примеры упрощенных однолинейных обозначений машин не приведены.
3. В упрощенных многолинейных обозначениях обмотки статора и ротора изображают аналогично упрощенным однолинейным обозначениям, показывая выводы обмоток статора и ротора (черт.1).
4. В развернутых обозначениях обмотки статора изображают в виде цепочек полуокружностей, а обмотки ротора — в виде окружности (и наоборот).
Взаимное расположение обмоток изображают:
а) в машинах переменного тока и универсальных — с учетом (черт.2) или без учета (черт.3) сдвига фаз.
б) в машинах постоянного тока — с учетом (черт.4) или без учета (черт.5) направления магнитного поля, создаваемого обмоткой.
5. В примерах условных графических обозначений машин переменного тока и универсальных машин приведены обозначения, отражающие сдвиг фаз в обмотке; в примерах машин постоянного тока — без учета направления магнитного поля.
6. Выводы обмоток статора и ротора в обозначениях машин всех типов допускается изображать с любой стороны.
В примерах построения условных графических обозначений машин выводы обмоток показаны:
а) в машинах переменного тока: выводы обмоток статора — вверх, обмоток ротора — вниз;
б) в машинах постоянного тока выводы всех обмоток показаны вверх.
Допускается указывать дополнительные сведения (обозначения соединений обмоток, числовые данные и т.д.).
(Измененная редакция, Изм. N 1).
7. Обозначения элементов электрических машин приведены в табл.1.
1. Обмотка компенсационная
1a. Обмотка вспомогательного полюса
2. Обмотка статора (каждой фазы) машины переменного тока, обмотка последовательного возбуждения машины постоянного тока
3. Обмотка параллельного возбуждения машины постоянного тока, обмотка независимого возбуждения
4. Статор, обмотка статора. Общее обозначение
Примечание. Если необходимо указать, что на статоре имеются две самостоятельные трехфазные обмотки, используют следующее обозначение
Для того чтобы нарисовать электрическую схему, применяют условные графические обозначения всех элементов. Так в упрощенном варианте можно изобразить любой элемент – резистор, конденсатор, электродвигатель и т.д. Они стандартизированы для основных видов элементов, в этой статье мы рассмотрим обозначения электрических двигателей на схеме.
Графическое обозначение электрических машин
Для схематичного обозначения была разработана специальная система ЕСКД, согласно которой на чертеже можно отобразить любой двигатель. Его представляют в виде окружности, рядом с которой может указываться буквенное обозначение. Например, ДГ — главный двигатель, ДШ — электродвигатель подачи шпинделя станка, ДО — насоса охлаждения и т.п. Рассмотрим, какие УГО стандартизирует система, полный их перечень приведен в ГОСТ 2.722-68
Двигатели постоянного тока
Машины постоянного тока имеют условное обозначение в зависимости от варианта возбуждения. На рисунке представлен электродвигатель постоянного тока с различными вариантами УГО.

Кроме этого, существует множество устройств с дополнительными функциями. Например, реверсивный электродвигатель с двумя обмотками или с параллельным возбуждением и вибрационным регулятором скорости вращения. Ниже приведены УГО таких устройств.

Асинхронные машины
Асинхронные электродвигатели изображаются на чертежах в виде окружности, внутри которой меньшая окружность, отображающая ротор.
 На иллюстрации представлено графическое обозначение асинхронной электрической машины с короткозамкнутым ротором на однолинейной схеме. Для трехфазной сети символическое представление мотора с фазным и короткозамкнутым выполняется подобным образом, отличие состоит лишь в количестве проводов и подключении цепи ротора.
На иллюстрации представлено графическое обозначение асинхронной электрической машины с короткозамкнутым ротором на однолинейной схеме. Для трехфазной сети символическое представление мотора с фазным и короткозамкнутым выполняется подобным образом, отличие состоит лишь в количестве проводов и подключении цепи ротора.

При этом если электродвигатель трехфазный, указывается схема соединения обмоток. Например, соединение звездой обозначается так:

Каждый тип трехфазных асинхронных машин имеет разный вид на чертеже. Ниже приведены варианты графического обозначения двигателей различного исполнения.

Синхронные машины
Синхронные машины по ГОСТ представлены в виде, который указан на нижеприведенной иллюстрации, при этом схема легко читается даже неспециалистом.

Явнополюсная машина с обмоткой на якоре, отображается на схеме в виде двух окружностей, здесь и к наружной, и к центральной подведены провода (к статору и ротору соответственно).
 Если обмотки соединены треугольником, то синхронный электродвигатель будет изображен на чертеже несколько иначе.
Если обмотки соединены треугольником, то синхронный электродвигатель будет изображен на чертеже несколько иначе.

Остальные разновидности УГО типов электродвигателей на схемах представлены с описанием на рисунке ниже.

Генераторы
Обозначение трехфазных генераторов, как и синхронных двигателей, имеет одинаковое графическое начертание. Ниже приведены изображения, которые отображаются на схеме.

УГО других видов электрических машин
Кроме распространенных устройств, применяются специальные, которые также имеют свое обозначение на схеме.

Специальные приборы типа сельсин-датчиков и приемников имеют кроме графического обозначения еще и буквенное описание, что проиллюстрировано на рисунке ниже.

Двигатель–преобразователь имеет изображение на схеме в соответствии с УГО. Его начертание на схеме приведено на иллюстрации.

Здесь представлены устройства, у которых имеется коллекторный узел. Он имеет УГО в виде двух прямоугольников по сторонам окружности.
Заключение
Графическое обозначение электрических машин на схемах выполняется согласно ГОСТ 2.722. При составлении схемы, необходимо руководствоваться данной документацией. В ней описаны все необходимые машины, а также указываются размеры окружности и других элементов рисунка, которые должны быть на чертежах и другие требования к чертежу.
§76. Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором (рис. 249 и 250) состоит из следующих основных частей: статор с трехфазной обмоткой, ротор с короткозамкнутой обмоткой и остов. Обмотка ротора выполнена бесконтактной (она не соединена ни с какой внешней цепью), что определяет высокую надежность такого двигателя.
Магнитная система. Асинхронная машина в отличие от машины постоянного тока не имеет явно выраженных полюсов. Такую магнитную систему называют неявнополюсной. Число полюсов в машине определяется числом катушек в обмотке статора и схемой их соединения. В четырехполюсной машине (рис. 251) магнитная система состоит из четырех одинаковых ветвей, по каждой из которых проходит половина магнитного потока Фп одного полюса, в двухполюсной машине таких ветвей две, в шестиполюсной — шесть и т. д. Так как через все элементы магнитной системы проходит переменный магнитный поток, то не только ротор 1, но
 Рис. 249. Асинхронный двигатель с короткозамкнутым ротором: 1 — остов; 2 — статор; 3 — ротор; 4 — стержни обмотки ротора; 5 — подшипниковый щит; 6 — вентиляционные лопатки ротора; 7 — вентилятор; 8 — коробка выводов
Рис. 249. Асинхронный двигатель с короткозамкнутым ротором: 1 — остов; 2 — статор; 3 — ротор; 4 — стержни обмотки ротора; 5 — подшипниковый щит; 6 — вентиляционные лопатки ротора; 7 — вентилятор; 8 — коробка выводов
 Рис. 250. Электрическая схема асинхронного двигателя с короткозамкнутым ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор
Рис. 250. Электрическая схема асинхронного двигателя с короткозамкнутым ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор
 Рис.251. Магнитное поле четырехполюсной асинхронной машины
Рис.251. Магнитное поле четырехполюсной асинхронной машины
 Рис. 252. Листы ротора (а) и статора (б)
Рис. 252. Листы ротора (а) и статора (б)
 Рис. 253. Пакет собранного статора (а) и статор с обмоткой (б)
Рис. 253. Пакет собранного статора (а) и статор с обмоткой (б)
и статор 2 выполняют из листов электротехнической стали (рис. 252), изолированных один от другого изоляционной лаковой пленкой, окалиной и пр. В результате этого уменьшается вредное действие вихревых токов, возникающих в стали статора и ротора при вращении магнитного поля. Листы статора и ротора имеют пазы открытой, полузакрытой или закрытой формы, в которых располагаются проводники соответствующих обмоток. В статоре чаще всего применяют полузакрытые пазы прямоугольной или овальной формы, в машинах большой мощности — открытые пазы прямоугольной формы.
Сердечник статора 1 (рис. 253, а) запрессовывают в литой остов 3 и укрепляют стопорными винтами. Сердечник ротора напрессовывают на вал ротора, который вращается в шариковых подшипниках, установленных в двух подшипниковых щитах. Воздушный зазор между статором и ротором имеет минимальный размер, допускаемый с точки зрения точности сборки и механической жесткости конструкции. В двигателях малой и средней мощности воздушный зазор обычно составляет несколько десятых миллиметра. Такой зазор обеспечивает уменьшение магнитного сопротивления магнитной цепи машины, а следовательно, и уменьшение намагничивающего тока, требуемого для создания в двигателе магнитного потока. Снижение намагничивающего тока позволяет повысить коэффициент мощности двигателя.
Обмотка статора. Она выполнена в виде ряда катушек из проволоки круглого или прямоугольного сечения. Проводники, находящиеся в пазах, соединяются, образуя ряд катушек 2 (рис. 253,б). Катушки разбивают на одинаковые группы по числу фаз, которые располагают симметрично вдоль окружности статора (рис. 254, а) или ротора. В каждой такой группе все катушки электрически соединяются, образуя одну фазу обмотки, т. е. отдельную электрическую цепь. При больших значениях фазного тока или при необходимости переключения отдельных катушек фазы могут иметь несколько параллельных ветвей. Простейшим элементом обмотки является виток (рис. 254,б), состоящий из двух проводников 1 и 2, размещенных в пазах, находящихся друг от друга на неко-
 Рис. 254. Расположение катушек трехфазной обмотки на статоре асинхронного двигателя (а) и виток из двух проводников (б)
Рис. 254. Расположение катушек трехфазной обмотки на статоре асинхронного двигателя (а) и виток из двух проводников (б)
тором расстоянии у. Это расстояние приблизительно равно одному полюсному делению т, под которым понимают длину дуги, соответствующую одному полюсу.
Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки. Иногда их называют секциями. Их укладывают таким образом, что в каждом пазу размещается одна сторона катушки или две стороны — одна над другой. В соответствии с этим различают одно- и двухслойные обмотки. Основным параметром, определяющим распределение обмотки по пазам, является число пазов q на полюс и фазу.
В обмотке статора двухполюсного двигателя (см. рис. 254, а) каждая фаза (А-Х; B-Y; C-Z) состоит из трех катушек, стороны которых расположены в трех смежных пазах, т. е. q = 3. Обычно q > 1, такая обмотка называется распределенной.
Наибольшее распространение получили двухслойные распределенные обмотки. Их секции 1 (рис. 255, а) укладывают в пазы 2 статора в два слоя. Проводники обмотки статора укрепляют в пазах текстолитовыми клиньями 5 (рис. 255,б), которые закладывают у головок зубцов.
Стенки паза покрывают листовым изоляционным материалом 4 (электрокартоном, лакотканью и пр.). Проводники, лежащие в пазах, соединяют друг с другом соответствующим образом с торцовых сторон машины. Соединяющие их провода называют лобовыми частями. Так как лобовые части не принимают участия в индуцировании э. д. с, их выполняют как можно короче.
Отдельные катушки обмотки статора могут соединяться «звездой» или «треугольником». Начала и концы обмоток каждой фазы выводят к шести зажимам двигателя.
Обмотка ротора. Обмотка ротора выполнена в виде беличьей клетки (рис. 256,а). Она сделана из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (рис. 256,б). Стержни этой обмотки вставляют в пазы ротора без какой-либо изоляции, так как напряжение в короткозамкну-
 Рис. 255. Двухслойная обмотка статора асинхронного двигателя: 1 — секция; 2 — паз; 3 — проводник; 4 — изоляционный материал; 5 — клин; 6 — зубец
Рис. 255. Двухслойная обмотка статора асинхронного двигателя: 1 — секция; 2 — паз; 3 — проводник; 4 — изоляционный материал; 5 — клин; 6 — зубец
 Рис. 256. Короткозамкнутый ротор: а — беличья клетка; б — ротор с беличьей клеткой из стержней; в — ротор с литой беличьей клеткой; 1 — короткозамыкающие кольца; 2— стержни; 3— вал; 4 — сердечник ротора; 5 — вентиляционные лопасти; 6 — стержни литой клетки
Рис. 256. Короткозамкнутый ротор: а — беличья клетка; б — ротор с беличьей клеткой из стержней; в — ротор с литой беличьей клеткой; 1 — короткозамыкающие кольца; 2— стержни; 3— вал; 4 — сердечник ротора; 5 — вентиляционные лопасти; 6 — стержни литой клетки
той обмотке ротора равно нулю. Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а в машинах малой мощности — закрытыми (паз имеет стальной ободок, отделяющий его от воздушного зазора). Такая форма паза позволяет хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивает ее индуктивное сопротивление.
В двигателях мощностью до 100 кВт стержни беличьей клетки обычно получают путем заливки расплавленного алюминия в пазы сердечника ротора (рис. 256, в). Вместе со стержнями беличьей клетки отливают и соединяющие их торцовые короткозамыкающие кольца.
Для этой цели пригоден алюминий, так как он обладает малой плотностью, достаточно высокой электропроводностью и легко плавится.
Обычно двигатели имеют вентиляторы, насаженные на вал ротора. Они осуществляют принудительную вентиляцию нагретых частей машины (обмоток и стали статора и ротора), позволяя получить от двигателя большую мощность. В двигателях с короткозамкнутым ротором лопасти вентилятора часто отливают совместно с боковыми кольцами беличьей клетки (см. рис. 256, в).
Асинхронные двигатели с короткозамкнутым ротором просты по конструкции, надежны в эксплуатации. Их широко применяют для привода металлообрабатывающих станков и других устройств, которые начинают работать без нагрузки. Однако сравнительно малый пусковой момент у этих двигателей и большой пусковой ток не позволяют использовать их для привода таких машин и механизмов, которые должны пускаться в ход сразу под большой нагрузкой (с большим пусковым моментом). К таким машинам относятся грузоподъемные устройства, компрессоры и др.
Увеличить пусковой момент и уменьшить пусковой ток можно при выполнении беличьей клетки с повышенным активным сопротивлением. При этом двигатель будет иметь увеличенное скольжение и большие потери мощности в обмотке ротора. Такие двигатели называют двигателями с повышенным скольжением (обозначаются АС). Их можно использовать для привода машин, работающих сравнительно небольшое время. На э. п. с. переменного тока эти двигатели (со скольжением до 10%) применяют для привода компрессоров, которые работают периодически в течение коротких промежутков времени при уменьшении давления в воздушных резервуарах ниже определенного предела.
Двигатели с повышенным пусковым моментом. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом имеют специальную конструкцию ротора (обозначаются АП). К ним относятся двигатели с двойной беличьей клеткой и двигатели с глубокими пазами.
Ротор 3 (рис. 257,а) двигателя с двойной беличьей клеткой имеет две короткозамкнутые обмотки. Наружная клетка 1 является пусковой. Она обладает большим активным и малым реактивным сопротивлениями. Внутренняя клетка 2 является основной обмоткой ротора; она, наоборот, обладает незначительным активным и большим реактивным сопротивлениями. В начальный момент пуска ток проходит, главным образом, по наружной клетке, которая создает значительный вращающий момент. По мере увеличения частоты вращения ток переходит во внутреннюю клетку, и по окончании процесса пуска машина работает как обычный короткозамкнутый двигатель с одной (внутренней) клеткой. Вытеснение тока в наружную клетку в начальный момент пуска объясняется действием, э. д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
Вытеснение тока в верхние проводники ротора сильно сказывается при неподвижном роторе, когда частота тока, индуцируемого в обеих клетках ротора, велика. При этом индуктивные

 Рис. 257. Конструкция роторов асинхронных двигателей с повышенным пусковым моментом: с двойной беличьей клеткой (а), с глубокими пазами (б) и разрезы их пазов (в и г)
Рис. 257. Конструкция роторов асинхронных двигателей с повышенным пусковым моментом: с двойной беличьей клеткой (а), с глубокими пазами (б) и разрезы их пазов (в и г)
сопротивления обеих клеток значительно больше активных и ток распределяется между ними обратно пропорционально их индуктивным сопротивлениям, т. е. проходит в основном по наружной клетке с большим активным сопротивлением. По мере возрастания частоты вращения ротора частота тока в нем будет уменьшаться (вращающееся магнитное поле будут пересекать проводники ротора с меньшей частотой), и ток начнет проходить по обеим клеткам в соответствии с их активными сопротивлениями, т. е., главным образом, через внутреннюю клетку.
Таким образом, процесс пуска двигателя с двойной беличьей клеткой имеет сходство с процессом пуска асинхронного двигателя с фазным ротором, когда в начале пуска в цепь обмотки ротора вводится добавочное активное сопротивление (пусковой реостат), а по мере разгона это сопротивление выводится. Точно так же и в рассматриваемом двигателе ток в начале пуска проходит по наружной клетке с большим активным сопротивлением, а затем по мере разгона постепенно переходит во внутреннюю клетку с малым активным сопротивлением.
Для повышения активного сопротивления пусковой клетки стержни ее изготовляют из маргацовистой латуни или бронзы. Стержни рабочей клетки выполняют из меди, обладающей малым удельным сопротивлением, причем площадь поперечного сечения их больше, чем у пусковой клетки. В результате этого активное сопротивление пусковой клетки увеличивается в 4—5 раз по сравнению с рабочей. Между стержнями обеих клеток имеется узкая щель 5, размеры которой определяют индуктивность рабочей клетки. Двухклеточный двигатель на 20—30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Действие двигателей с глубокими пазами (рис. 257, б) также основано на использовании явления вытеснения тока. В этих двигателях стержни 4 беличьей клетки выполнены в виде узких медных шин, заложенных в глубокие пазы ротора 3 (высота паза в 10— 12 раз больше его ширины). Нижние слои стержней, расположенные дальше от поверхности ротора, охватываются значительно большим числом магнитных линий потока рассеяния 6, чем верхние (рис. 257,г), поэтому они имеют во много раз большую индуктивность. В начале пуска в результате увеличенного индуктивного сопротивления нижних частей стержней ток проходит, главным образом, по их верхним частям. При этом используется только небольшая часть поперечного сечения каждого стержня, что приводит к увеличению его активного сопротивления, а следовательно, и к возрастанию активного сопротивления всей обмотки ротора.
При увеличении частоты вращения ротора вытеснение тока в верхние части стержней уменьшается (по той же причине, что и в двигателе с двойной беличьей клеткой), и после окончания пуска ток равномерно распределяется по площади их поперечного сечения.
Типовые схемы включения асинхронных электродвигателей. Схема управления асинхронным электродвигателем. Нереверсивная схема управления асинхронного двигателя
Типовые схемы релейно-контакторного управления асинхронными двигателями (АД) строятся по тем же принципам, что и схемы управления двигателями постоянного тока.
Типовые схемы управления ад с короткозамкнутым ротором
Двигатели этого типа малой и средней мощности обычно пускаются прямым подключением к сети без ограничения пусковых токов. В этих случаях они управляются с помощью магнитных пускателей, которые одновременно обеспечивают и некоторые виды их защиты.
Схема управления асинхронным двигателем с использованием магнитного пускателя (рис. 2.1) включает в себя магнитный пускатель, состоящий из контактора КМ и трех встроенных в него тепловых реле защиты КК. Схема обеспечивает прямой (без ограничения тока и момента) пуск двигателя, отключение его от сети, а также защиту от коротких замыканий (предохранители F А) и перегрузки (тепловые реле КК).
Рис. 2.1. Схема управления АД с использованием
нереверсивного магнитного пускателя
Для пуска двигателя замыкают выключатель QF и нажимают кнопку пуска S В 1. Получает питание катушка контактора КМ, который, включившись, своими главными силовыми контактами в цепи статора двигателя подключает его к источнику питания, а вспомогательным контактом шунтирует кнопку S В1. Происходит разбег двигателя по его естественной характеристике. Для отключения двигателя нажимается кнопка остановки S В2, контактор КМ теряет питание и отключает двигатель от сети. Начинается процесс торможения двигателя выбегом под действием момента нагрузки на его валу.
Реверсивная схема управления ад.
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ 1 и КМ 2 и два тепловых реле защиты КК (рис. 2.2). Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.

Рис. 2.2. Схема управления АД с использованием реверсивного магнитного пускателя
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF ) и управления (предохранители F А). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ 1 и КМ 2).
Пуск двигателя при включенном QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок S В1 или S В2. Это приводит к срабатыванию контактора КМ 1 или КМ 2, подключению двигателя к сети и его разбегу.
Для реверса или торможения двигателя вначале нажимается кнопка S В З, что приводит к отключению включенного до сих пор контактора (например, КМ 1), после чего нажимается кнопка S В 2.
Это приводит к включению контактора КМ 2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле двигателя изменяет свое направление вращения на противоположное, что приводит к началу процесса реверса. Этот процесс состоит из двух этапов: торможения противовключением и разбега в противоположную сторону.
В случае необходимости только торможения двигателя при достижении им нулевой частоты вращения должна быть вновь нажата кнопка S В З, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка S В З нажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок S В 1 и S В 2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ 1 в цепь катушки аппарата КМ 2 и, наоборот.
Следует отметить, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF . Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании.
Схема управления многоскоростным АД .
Эта схема (рис. 2.3) обеспечивает получение двух скоростей двигателя путем соединения секций (полуобмоток) обмотки статора в треугольник или двойную звезду, а также его реверсирование. Защита электропривода осуществляется тепловыми реле КК 1 и КК 2 и предохранителями F А.

Рис. 2.3. Схема управления двухскоростным АД
Для пуска двигателя на низкую частоту вращения нажимается кнопка S В 4, после чего срабатывает контактор КМ 2 и блокировочное реле К V . Статор двигателя оказывается включенным по схеме треугольника, а реле К V , замкнув свои контакты в цепях катушек аппаратов КМ З и КМ 4, подготавливает подключение двигателя к источнику питания. Далее нажатие кнопки S В 1 или S В 2 приводит к включению соответственно в направлении «Вперед» или «Назад».
После разбега двигателя до низкой частоты вращения может быть осуществлен его разгон до высокой частоты вращения. Для этого нажимается кнопка S В 5, что приведет к отключению контактора КМ 2 и включению контактора КМ 1, обеспечивающему переключение секций обмоток статора с треугольника на двойную звезду.
Остановка двигателя производится нажатием кнопки S В 3, что вызовет отключение всех контакторов от сети и торможение двигателя выбегом.
Применение в схеме двухцепных кнопок управления не допускает одновременного включения контакторов КМ 1 и КМ 2, КМ 3 и КМ 4. Этой же цели служит перекрестное включение размыкающих блок-контактов контакторов КМ 1 и КМ 2, КМ 3 и КМ 4 в цепи их катушек.
Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени
Пуск двигателя осуществляется нажатием кнопки S В 1 (рис. 2.4), после чего срабатывает линейный контактор КМ , подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ 1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.

Рис. 2.4. Схема управления пуском и динамическим торможением АД с короткозамкнутым ротором
Для остановки двигателя нажимается кнопка S В 2, Контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ 1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ 1, подаче в обмотки статора постоянного тока от выпрямителя V через резистор R т и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ 1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором R т, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ 1, включенных перекрестно в цепи катушек этих аппаратов.
Типовые схемы управления АДс фазным ротором . Схемы управления двигателя с фазным ротором, которые рассчитаны в основном на среднюю и большую мощность, должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора. За счет включения резисторов в цепь ротора можно также увеличить момент при пуске вплоть до уровня критического (максимального) момента.
Схема одноступенчатого пуска АД в функции времени и торможения противовключением в функции ЭДС
После подачи напряжения включается реле времени КТ (рис. 2.5), которое своим размыкающим контактом разрывает цепь питания контактора КМ 3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.

Рис.2.5. Схема управления пуском и торможением противовключением АД с фазным ротором
Включение двигателя производится нажатием кнопки S В 1, после чего включается контактор КМ 1. Статор двигателя подсоединяется к сети, электромагнитный тормоз Y В растормаживается, и начинается разбег двигателя. Включение КМ 1 одновременно приводит к срабатыванию контактора КМ 4, который своим контактом шунтирует ненужный при пуске резистор противовключения R д2 , а также разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ 3, который срабатывает и шунтирует пусковой резистор R д1 , в цепи ротора, и двигатель выходит на свою естественную характеристику.
Управление торможением обеспечивает реле торможения K V , контролирующее уровень ЭДС (частоты вращения) ротора. С помощью резистора R p , оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0

