Шаговые двигатели
Шаговые двигатели
Шаговые двигатели представляют собой электромеханические устройства, задачей которых является преобразование электрических импульсов в перемещение вала двигателя на определенный угол. Такие двигатели имеют существенные отличия от обычных, что и определяет их исключительные свойства при использовании в некоторых областях применения.
Шаговый двигатель (ШД) является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, ШД высоконадежен и при надлежащей эксплуатации имеет длительный срок службы. ШД нашли широкое применение в области, где требуется высокая точность перемещений или скорости. Наглядными примерами устройств с ШД могут служить принтеры, факсы и копировальные машины, а также более сложные устройства: станки с ЧПУ (числовым программным управлением), фрезерные, гравировальные машины и т. д.
Достоинствами шаговых двигателей по сравнению с простыми являются:
угол поворота ротора ШД зависит от числа поданных на двигатель пусковых импульсов;
максимальный момент на валу ШД развивается в режиме останова (в случае, если обмотки двигателя запитаны);
высокая точность позиционирования и повторяемости — качественные ШД имеют точность не хуже 2,5 % от величины шага, при этом данная ошибка не накапливается при последующих шагах;
ШД может быстро стартовать, останавливаться и выполнять реверс;
высокая надежность двигателя обусловлена отсутствием щеток, при этом срок службы двигателя ограничивается только лишь сроком службы подшипников;
четкая взаимосвязь угла поворота ротора от количества входных импульсов (в штатных режимах работы) позволяет выполнять позиционирование без применения обратной связи;
ШД обеспечивает получение сверхнизких скоростей вращения вала для нагрузки, подведенной непосредственно к валу двигателя, без использования редуктора;
работают ШД в широком диапазоне скоростей, поскольку скорость напрямую зависит от количества входных импульсов.
Недостатки шаговых двигателей:
ШД обладает явлением резонанса;
возможен вариант выпадения двигателя из синхронизации с последующей потерей информации о положении при работе цепи обратной связи;
при стандартных схемах подключения количество потребляемой энергии не уменьшается при отсутствии нагрузки;
сложность управления при работе на высоких скоростях (на самом деле эффективная работа шагового двигателя на высоких скоростях возможна);
низкая удельная мощность шагового привода;
для обеспечения эффективного управления шаговым двигателем требуется очень сложная схема управления.
Управление шаговым двигателем
В самом общем виде управление шаговым двигателем сводится к задаче отработать определенное число шагов в нужном направлении и с нужной скоростью.
 |
| Схема подключения шагового двигателя |
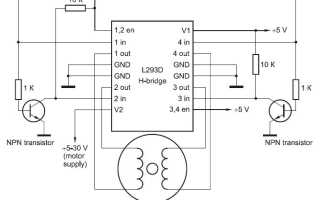
На блок управления ШД (драйвер) подаются сигналы «сделать шаг» и «задать направление». Сигналы представляют собой импульсы 5 В. Такие импульсы можно получить от микроконтроллера Arduino. Для шагового двигателя необходимо отдельное питание — выводы шагового двигателя напрямую к выводам Arduino подключать нельзя. Подключение ШД осуществляется через Motor Shild либо с помощью микросхемы драйвера двигателей — например, L293. Схема подключения представлена на рисунке.
Arduino-библиотека Stepper
Для управления шаговым двигателем в Arduino имеется стандартная библиотека
Набор функций у нее следующий:
Функция Stepper()
Функция Stepper() создает новый объект класса Stepper, привязанный к одному шаговому двигателю, подключенному к контроллеру Arduino. Конструктор следует использовать при объявлении переменной класса Stepper, обычно в самом начале — вне setup() и loop(). Количество параметров зависит от способа подключения — 2 или 4 выхода используются для управления двигателем.
Stepper(steps, pin1, pin2) Stepper(steps, pin1, pin2, pin3, pin4)
steps — количество шагов в полном обороте используемого двигателя. Если в документации к двигателю указан угол одного шага, то следует разделить 360° на этот угол, что даст нам искомое количество шагов;
pin1, pin2, pin3, pin4 — выходы Arduino для подключения шагового двигателя. Возвращаемое значение: новый экземпляр объекта класса Stepper.
Функция setSpeed(rpm)
Функция setSpeed(rpm) устанавливает скорость вращения в оборотах в минуту. Эта функция не заставляет двигатель вращаться, а лишь устанавливает скорость вращения, которая будет использована при вызове функции step().
Параметр: rpm — скорость, на которой будет производиться вращение шагового двигателя, выражается в оборотах в минуту.
Возвращаемого значения нет.
Функция step(steps)
Функция step(steps) вращает шаговый двигатель на определенное количество шагов на скорости, заданной функцией setSpeed(). Эта функция блокирующая, т. е. она ожидает окончания вращения двигателя, прежде чем передать управление в следующую строку кода. Во избежание длительной блокировки выполнения кода скетча, управление необходимо организовывать так, чтобы скорость была высокая, а за один вызов step() делалось всего несколько шагов.
Параметр: steps — количество шагов:
• положительное число — вызывает вращение в одну сторону;
• отрицательное — в противоположную. Возвращаемого значения нет.
Пример использования библиотеки Stepper
В примере представлен пример использования библиотеки Stepper — поворот шагового двигателя при нажатии кнопок «влево» и «вправо» на определенный угол, что можно представить как программную заготовку для поворота панорамной камеры в одной плоскости. В примере использованы шаговый двигатель и аналоговая клавиатура
- Sketch code
Sketch code
const int stepsPerRevolution=200; // количество шагов в полном обороте двигателя
int minangle=15; // угол поворота на 1 нажатие (шаг камеры) struct KEYS // структура для хранения статусов клавиш
int button; // нажатая кнопка
long millisbutton[7]; // millis для button
// опрос клавиатуры valbutton=analogRead(A0); if(valbutton
// обработка нажатия кнопки int buttonClick1(int val)
Устройство управления шаговым двигателем
Назначение и описание принципа работы шагового двигателя. Структурная блок-схема прибора. Диаграмма подачи импульсов на обмотки в полношаговом режиме. Реализация схемы и модели в программной среде Proteus. Модель устройства управления шаговым двигателем.
| Рубрика | Коммуникации, связь, цифровые приборы и радиоэлектроника |
| Вид | курсовая работа |
| Язык | русский |
| Дата добавления | 16.02.2013 |
| Размер файла | 1,6 M |
- посмотреть текст работы
- скачать работу можно здесь
- полная информация о работе
- весь список подобных работ

Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru/
3. Технические характеристики
4. Описание принципа работы
4.1 Описание структуры
4.2 Математическая модель
4.3 Реализация схемы и модели в среде Proteus
4.4 Модель устройства управления ШД
Список использованной литературы
На сегодняшнем этапе развития информационных технологий, все шире внедряются в производство с системой автоматизированного управления. На ряду с такими важными элементами, как первичные преобразователи информации и системы управления важную роль играют исполнительные устройства разного рода. Одним из видов таких устройств являются электроприводы. Одним из подвидов электроприводом, является шаговый привод. Шаговые двигатели получили широкое распостранение за счет простоты управления, высокой точности позиционирования, большого диапазона скоростей, низкой стоимости. В данной работе описывается устройство управления шаговым двигателем.
Устройство управления шаговым двигателем предназначено для управления переключеним обмоток шагового двигателя, с целью позиционирования ротора шагового двигателя.
2. Состав
3. Технические характеристики
В взятого мной шагового двигателя, квант углового перемещение, состоит из шести шагов, который был задан кодом в прошивке.
— Питание необходимое для нормальной работы — 12В
— Допустимые размеры для изготовления, не более 175х50х10 -+ 5 см
— Допустимые температуры для данного прибора — 70 — +75
Прибор изготавливается для работы в обычных, не экстремальных условиях (количество пыли превышающее норму повышенная вибрация и тряска, воздействие различных кислот работоспособность прибора не гарантирует)
шаговый двигатель управление
4. Описание принципа работы
Наверное, каждый видел, как выглядит шаговый двигатель внешне: он практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов
Посчитав, что тема «Шагового двигателя» не была широко раскрыта, я решил поработать именно с этой тематикой.
Если сказать кратко, то Ша м говый электродви м гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток подаваемый в одну из обмоток статора вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора .
Рис. 4.1. — «Шаговый электродвигатель»
4.1 Описание струкуры
Структуру данного прибора изобразить достаточно просто.
Более обобщенно это аппаратная часть и программная.
Если углубится — генератор, устройство управления, память. Конечно же устройство ввода и вывода.
Рисунок 4.1.1 — «Структурная блок-схема прибора»
4.2 Математическая модель
Рис. 4.2.1. — «Диаграмма подачи импульсов на обмотки в полношаговом режиме»
Рис. 4.2.2. — «Диаграмма подачи импульсов на обмотки в полушаговом режиме использования»
Рис. 4.2.3. — «Временная диаграмма наростания тока в обмотке ШД»
4.3 Реализация схемы и модели в среде Proteus
Рис.4.3.1. — «Схема принципиальная. Среда Proteus »
4.4 Модель устройства управления ШД
Была изготовлена модель данного утройства
Рис. 4.4.1 — «Модель ШД»
Рис. 4.4.2 — «Устройство ввода»
Рис. 4.4.3.- «ШД, устройство вывода»
В курсовой работе была рассмотрена и изготовлена модель Шагового двигателя. На сегодняшнем этапе развития информационных технологий, все шире внедряются в производство с системой возможности ввода, вывода информации. Поэтому данный прибор может широко использоваться не только в специализованных направлениях.
Список использованной литературы
1. Бабич Н.П. Компьютерная схемотехника. Методы построения и проектирования: Учебное пособие / Н.П.Бабич, И.А.Жуков. — Беларусь, Минск: МК-Пресс, 2004. — 576 с.
2. Опадчий Ю.Ф. и др. Аналоговая и цифровая электроника (Полный курс): Учебник для вузов / Ю.Ф.Опадчий,, О.П.Глудкин, А.И.Гуров; Под ред. О.П.Глудкина. — М.: Горячая Линия-Телеком, 2000. — 768 с.
3. Угрюмов Е.П. Цифровая схемотехника. — СПб.: БХВ-Петербург, 2001.
4. Пухальский Г.И., Новосельцева Т.Я. Проектирование дискретных устройств на интегральных микросхемах: Справочник. — М.: Радио и связь, 1990. — 304 с.
5. Пухальский Г.И., Новосельцева Т.Я. Цифровые устройства: Учебное пособие для вузов. — СПб.: Политехника, 1996. — 885 с.
Издание [4], дополненное учебными материалами.
6. Зельдин Е.А. Цифровые интегральные микросхемы в информационно-измеритель-ной аппаратуре. — Л.: Энергоатомиздат, 1986. — 280 с.
7. Преснухин Л.Н., Воробьев Н.В., Шишкевич А.А. Расчет элементов цифровых устройств. — М.: Высшая школа, 1991. — 526 с.
Размещено на Allbest.ru
Подобные документы
Структурная и функциональная схема управления исполнительными устройствами на базе шагового двигателя. Проектирование принципиальной схемы управления шаговым двигателем, описание ее работы и входящих в нее устройств. Составление алгоритма работы системы.
курсовая работа [613,8 K], добавлен 22.09.2012
Структурная схема устройства. Выбор элементной базы и электрической схемы. Использование многоуровневой конвейерной обработки. Последовательность выполнения программы. Команды условного и безусловного перехода. Пространство регистров ввода-вывода.
контрольная работа [308,2 K], добавлен 07.07.2013
Упрощенная модель системы регулировки. Стандартный конструктив Ардуино с платами расширения. Внешний вид Ардуино Uno. Среда разработки Arduino. Встроенный текстовый редактор программного кода. Программа управления шаговым двигателем в однофазном режиме.
курсовая работа [4,5 M], добавлен 02.06.2015
Анализ исходных данных и выбор схемы импульсного управления исполнительным двигателем постоянного тока. Принцип работы устройства. Расчёт генератора линейно изменяющегося напряжения. Построение механической и регулировочной характеристик электродвигателя.
курсовая работа [843,9 K], добавлен 14.10.2009
Разработка энергосберегающей системы управления трехфазным асинхронным двигателем главного движения токарного станка. Блок системы управления и датчик скорости в составе устройства. Анализ структуры микропроцессорной системы. Выбор конструкции устройства.
дипломная работа [2,2 M], добавлен 20.07.2014
Описание принципа работы структурной электрической схемы устройства умножения двоичных чисел, назначение каждого из входящих в нее узлов. Назначение и принцип построения матричных умножителей двоичных чисел, его структурная и электрическая схемы.
реферат [63,9 K], добавлен 04.02.2012
Описание модели упрощения обработки поступающего сигнала. Структурная схема преобразователя аналоговой информации. Расчет принципиальной схемы устройства: блок интегрирования, генератор прямоугольных импульсов, источник напряжения и усилитель мощности.
курсовая работа [254,0 K], добавлен 22.12.2012
Контроллер шагового двигателя

Ступинский авиа-металлургический
техникум им.
КУРСОВОЙ ПРОЕКТ
Контроллер шагового двигателя
АВТОР: Т,.
ГРУППА: Э — 11
ПРЕДМЕТ: “Аналоговая и цифровая схемотехника”
Описание шаговых двигателей
Блок схема контроллера.
Описание принципа работы контроллера.
Печатная плата контроллера.
Программа для управления контроллером
Список используемой литературы
Целью курсовой работы стоит разработка схемы управления тремя шаговыми двигателями с помощью компьютера по порту LPT. При этом должны преследоваться следующие цели:
— применение логических элементов
— высокая скорость обработки сигнала.
1. Описание шагового двигателя
Шаговый электродвигатель — это синхронный импульсный электродвигатель, в котором импульсы тока, подаваемые в обмотки возбуждения статора, преобразуются в дискретные угловые перемещения (шаги) ротора. Конструктивно шаговые электродвигатели исполняются с явно — и неявнополюсным статором, на котором расположены обмотки возбуждения, и с ротором без обмотки, выполненным из магнитно-мягкого (реактивный ротор), или из магнитно-жесткого (активный ротор) материала. Шаговые двигатели с активным ротором позволяют получать больший вращающий момент и обеспечивают фиксацию положения ротора при обесточенных обмотках.
В шаговом электродвигателе импульсы тока через коммутатор поступают поочередно в обмотки статора, в результате чего ориентация магнитного потока в пространстве между полюсами статора дискретно меняется и вызывает поворот ротора на некоторый угол, называемый шагом ротора.
Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задается последовательностью электрических импульсов, например, в станках с ЧПУ.
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с шагом 1,8° (200 шаг/об) или 0,9° (400 шаг/об). В микрошаговом режиме можно получить разрешающую способность в 51200 шаг/об.
Главное преимущество шаговых двигателей — экономичная цена, в среднем в 1,5-2 раза дешевле асинхронных аналогов. Шаговый привод как недорогая альтернатива сервоприводу наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика, точность позиционирования, большая мощность и скорость вращения, а также для замены (модернизации) шаговых приводов, выработавших установленный ресурс.
Их использование также оправдано в транспортных средствах (на кораблях, самолетах, поездах), где используется бортовое напряжение от 24 до 75 В постоянного тока.
2. Блок схема контроллера.
Схему можно разделить на три части (см. рис 1):

Рис.1. Блок схема контроллера
Блок питания:
Рассчитывается исходя из используемых шаговых двигателей. Максимальный ток в режиме микро шага будет равен:
Iоб – ток одной обмотки
Расчет прост: 3 двигателя х по две запитанные обмотки в каждом х ток одной обмотки (допустим 1А) то = 3х2х1=6А.
Контролер: Разработанный контроллер может обслуживать до 32 (в моей схеме 3) шаговых двигателей последовательно, т. е. одновременно может работать только один двигатель. Параллельная работа двигателей обеспечивается программно. Контроллер управления шаговыми двигателями собран на микросхемах 555TM7 серии (3шт). Не требует прошивки.

Рис.2 схема контроллера
Драйвер: Драйвер шагового двигателя (не путать с компьютерными драйверами) представляет собой 4х канальный усилитель или 4 ключа. Собран на 4х транзисторах КТ 917 .

Рис 3.Схема драйвера.
3. Описание принципа работы контроллера.
Описание и назначение выводов разъема порта LPT.
ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
Блог технической поддержки моих разработок
Простой контроллер шагового двигателя на PIC12F629
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение (прошивка) для него.
Общее описание.
Контроллер шагового двигателя разработан на PIC контроллере PIC12F629. Это 8 выводной микроконтроллер стоимостью всего 0,5 $. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности.
- Контроллер имеет варианты схем для управления как униполярным, так и биполярным шаговым двигателем.
- Обеспечивает регулировку скорости вращения двигателя в широких пределах.
- Имеет два режима управления шаговым двигателем:
- полношаговый;
- полушаговый.
- Обеспечивает вращение в прямом и реверсивном направлениях.
- Задание режимов, параметров, управление контроллером осуществляется двумя кнопками и сигналом ВКЛ (включение).
- При выключении питания все режимы и параметры сохраняются в энергонезависимой памяти контроллера и не требуют переустановки при включении.
Контроллер не имеет защиты от коротких замыканий обмоток двигателя. Но реализация этой функции значительно усложняет схему, а замыкание обмоток – случай крайне редкий. Я с таким не сталкивался. К тому же механическая остановка вала шагового двигателя во время вращения не вызывает опасных токов и защиты драйвера не требует.
Про режимы и способы управления шаговым двигателем можно почитать здесь, про дайверы здесь.
Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах.
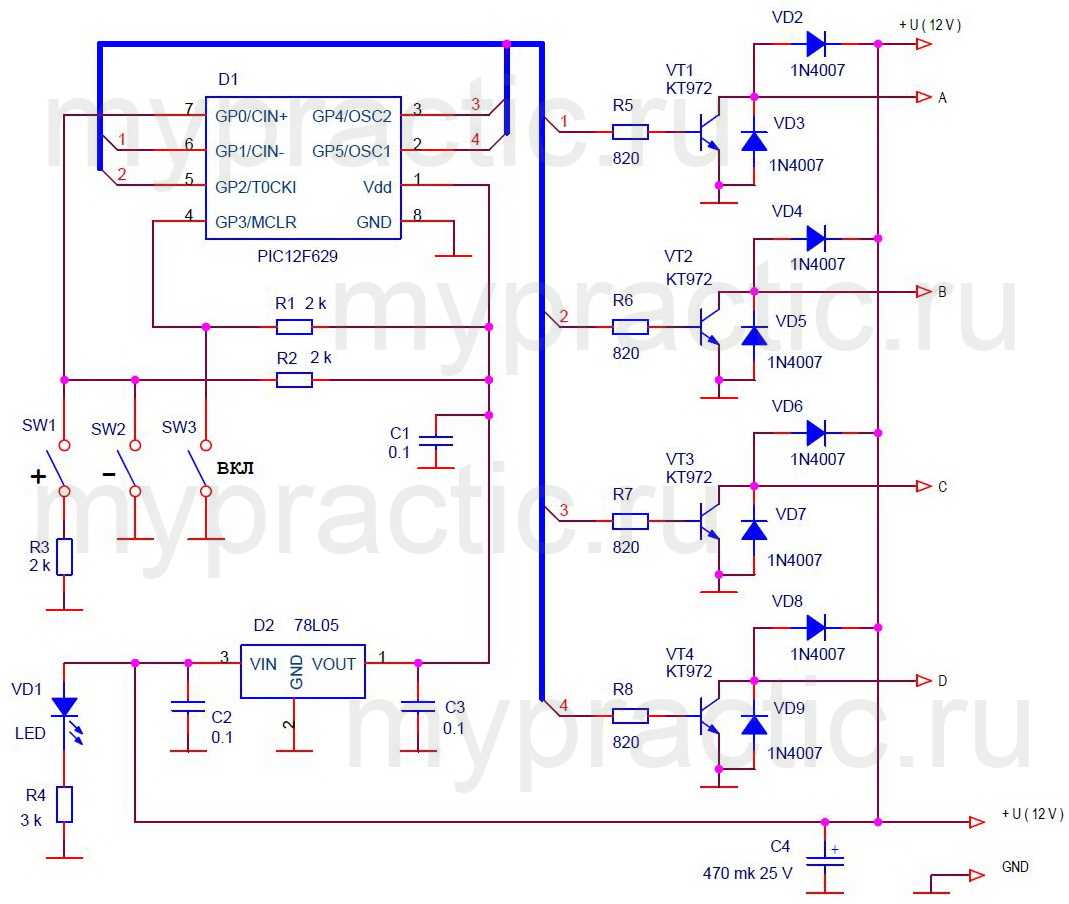
Объяснять в схеме особенно нечего. К PIC контроллеру подключены:
- кнопки «+» и «–» (через аналоговый вход компаратора);
- сигнал ВКЛ (включение двигателя);
- драйвер ( транзисторы VT1-Vt4 , защитные диоды VD2-VD9).
PIC использует внутренний генератор тактирования. Режимы и параметры хранятся во внутреннем EEPROM.
Схема драйвера на биполярных транзисторах КТ972 обеспечивает ток коммутации до 2 А, напряжение обмоток до 24 В.
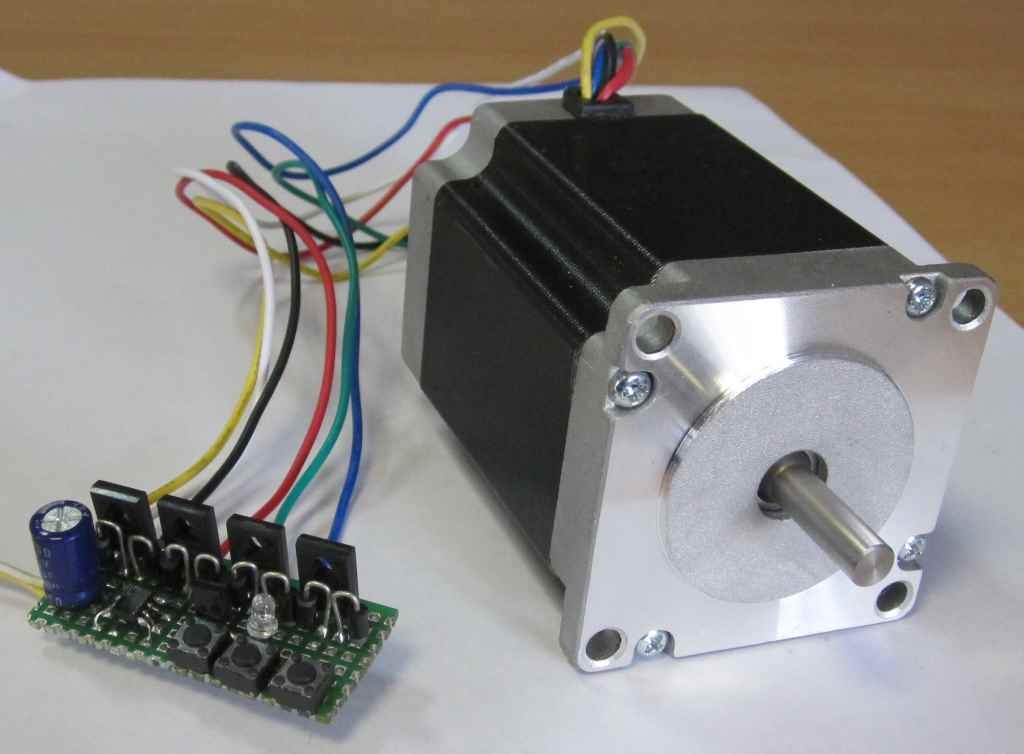
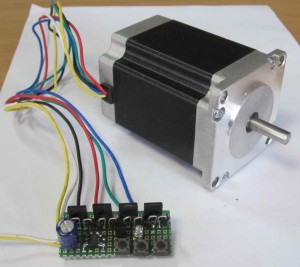
Я спаял контроллер на макетной плате размерами 45 x 20 мм.

Если ток коммутации не превышает 0,5 А, можно использовать транзисторы серии BC817 в корпусах SOT-23. Устройство получится совсем миниатюрным.
Программное обеспечение и управление контроллером.
Резидентное программное обеспечение написано на ассемблере с циклической переустановкой всех регистров. Программа зависнуть в принципе не может. Загрузить программное обеспечение (прошивку) для PIC12F629 можно здесь.
Управление контроллером достаточно простое.
- При активном сигнале «ВКЛ» (замкнут на землю) двигатель крутится, при неактивном (оторван от земли) – остановлен.
- При работающем двигателе ( сигнал ВКЛ активен) кнопки «+» и «–» меняют скорость вращения.
- Каждое нажатие на кнопку «+» увеличивает скорость на минимальную дискретность.
- Нажатие кнопки «–» — уменьшает скорость.
- При удержании кнопок «+» или «–» скорость вращения плавно увеличивается или уменьшается, на 15 значений дискретности в сек.
- При остановленном двигателе ( сигнал ВКЛ не активен).
- Нажатие кнопки «+» задает режим вращения в прямом направлении.
- Нажатие кнопки «–» переводит контроллер в режим реверсивного вращения.
- Для выбора режима – полношаговый или полушаговый необходимо при подаче питания на контроллер удерживать кнопку «–» в нажатом состоянии. Режим управления двигателем будет изменен на другой (проинвертирован). Достаточно выдержать кнопку – нажатой в течение 0,5 сек.
Схема контроллера униполярного шагового двигателя с драйвером на MOSFET транзисторах.
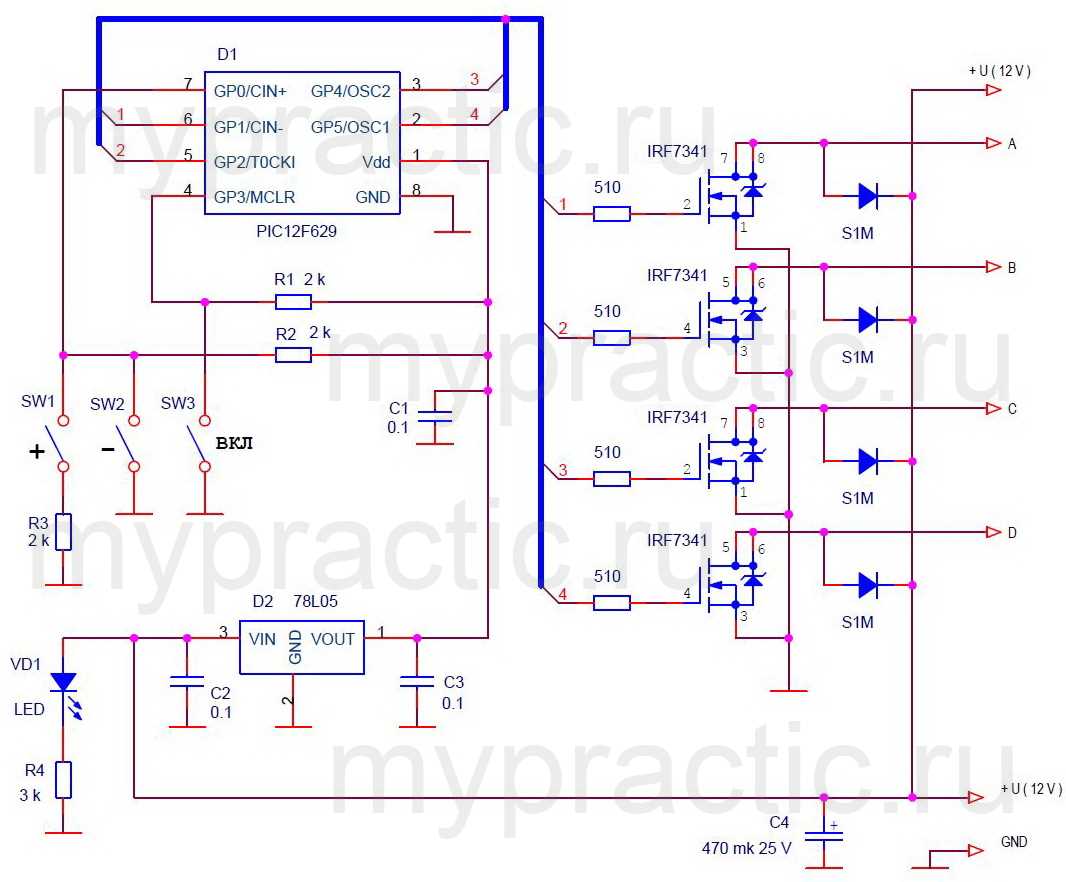
Низкопороговые MOSFET транзисторы позволяют создать драйвер с более высоким параметрами. Применение в драйвере MOSFET транзисторов, например, IRF7341 дает следующие преимущества.
- Сопротивление транзисторов в открытом состоянии не более 0,05 Ом. Значит малое падение напряжения (0,1 В при токе 2 А), транзисторы не греются, не требуют радиаторов охлаждения.
- Ток транзисторов до 4 А.
- Напряжение до 55 В.
- В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора. Т.е. на реализацию драйвера потребуется 2 миниатюрных корпуса.
Таких параметров невозможно достичь на биполярных транзисторах. При токе коммутации свыше 1 А настоятельно рекомендую вариант утройства на MOSFET транзисторах.
Подключение к контроллеру униполярных шаговых двигателей.
В униполярном режиме могут работать двигатели с конфигурациями обмоток 5, 6 и 8 проводов.
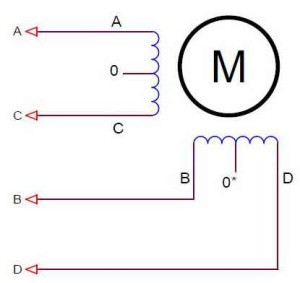
Схема подключения униполярного шагового двигателя с 5 и 6 проводами (выводами).
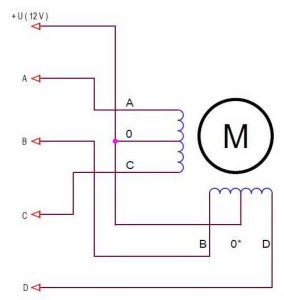
Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 6 проводов выводы промаркированы следующим цветами.
| Обозначение вывода на схеме | Цвет провода |
| A | черный |
| желтый | |
| C | зеленый |
| B | красный |
| 0* | белый |
| D | синий |
Конфигурация с 5 проводами это вариант, в котором общие провода обмоток соединены внутри двигателя. Такие двигатели бывают. Например, PM35S-048.

Документацию по шаговому двигателю PM35S-048 в PDF формате можно загрузить здесь.
Схема подключения униполярного шагового двигателя с 8 проводами (выводами).
То же самое как и для предыдущего варианта, только все соединения обмоток происходят вне двигателя.
Как выбирать напряжение для шагового двигателя.
По закону Ома через сопротивление обмотки и допустимый ток фазы.
U = Iфазы * Rобмотки
Сопротивление обмотки постоянному току можно измерить, а ток надо искать в справочных данных.
Подчеркну, что речь идет о простых драйверах, которые не обеспечивают сложную форму тока и напряжения. Такие режимы используются на больших скоростях вращения.
Как определить обмотки шаговых двигателей, если нет справочных данных.
В униполярных двигателях с 5 и 6 выводами, средний вывод можно определить, измерив, сопротивление обмоток. Между фазами сопротивление будет в два раза больше, чем между средним выводом и фазой. Средние выводы подключаются к плюсу источника питания.
Дальше любой из фазных выводов можно назначить фазой A. Останется 8 вариантов коммутаций выводов. Можно их перебрать. Если учесть, что обмотка фазы B имеет другой средний провод, то вариантов становится еще меньше. Попутка обмоток фаз не ведет к выходу из строя драйвера или двигателя. Двигатель дребезжит и не крутится.
Только надо помнить, что к такому же эффекту приводит слишком высокая скорость вращения (выход из синхронизации). Т.е. надо скорость вращения установить заведомо низкую.
Схема контроллера биполярного шагового двигателя с интегральным драйвером L298N.
Биполярный режим дает два преимущества:
- может быть использован двигатель с почти любой конфигурацией обмоток;
- примерно на 40% повышается крутящий момент.
Создавать схему биполярного драйвера на дискретных элементах – дело неблагодарное. Проще использовать интегральный драйвер L298N. Описание на русском языке есть здесь.
Схема контроллера с биполярным драйвером L298N выглядит так.
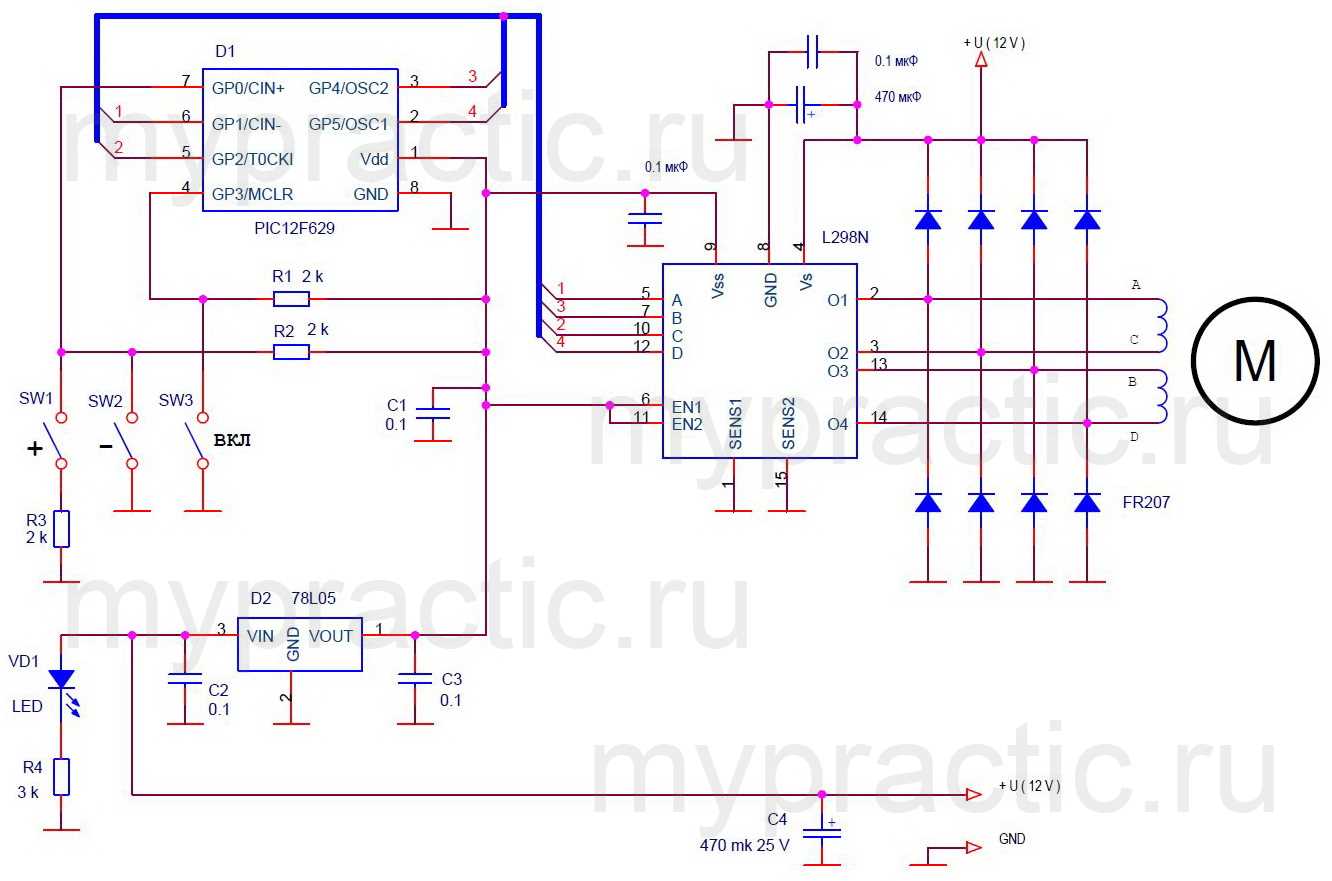
Драйвер L298N включен по стандартной схеме. Такой вариант контроллера обеспечивает фазные токи до 2 А, напряжение до 30 В.
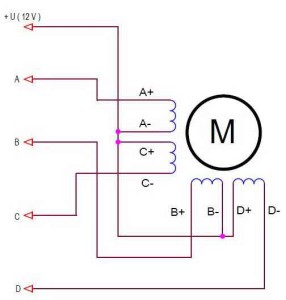
Подключение к контроллеру биполярных шаговых двигателей.
В этом режиме может быть подключен двигатель с любой конфигурацией обмоток 4, 6, 8 проводов.
Схема подключения биполярного шагового двигателя с 4 проводами (выводами).
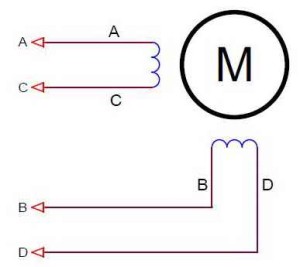
Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 4 провода выводы промаркированы следующим цветами.
| Обозначение вывода на схеме | Цвет провода |
| A | черный |
| C | зеленый |
| B | красный |
| D | синий |
Схема подключения биполярного шагового двигателя с 6 проводами (выводами).
Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с такой конфигурацией обмоток выводы промаркированы следующим цветами.
| Обозначение вывода на схеме | Цвет провода |
| A | черный |
| C | зеленый |
| B | красный |
| D | синий |
Такая схема требует напряжения питания в два раза большего по сравнению с униполярным включением, т.к. сопротивление обмоток в два раза больше. Скорее всего, контроллер надо подключать к питанию 24 В.
Схема подключения биполярного шагового двигателя с 8 проводами (выводами).
Может быть два варианта:
- с последовательным включением
- с параллельным включением.
Схема последовательного включения обмоток.
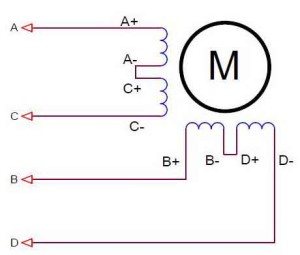
Схема с последовательным включением обмоток требует в два раза большего напряжения обмоток. Зато не увеличивается ток фазы.
Схема параллельного включения обмоток.
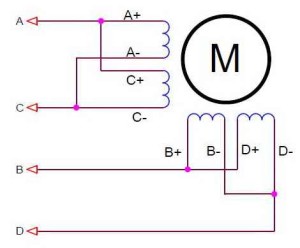
Схема с параллельным включением обмоток увеличивает в 2 раза фазные токи. К достоинствам этой схемы можно отнести, низкую индуктивность фазных обмоток. Это важно на больших скоростях вращения.
Т.е. выбор между последовательным и параллельным включением биполярного шагового двигателя с 8 выводами определяется критериями:
- максимальный ток драйвера;
- максимальное напряжение драйвера;
- скорость вращения двигателя.
Программное обеспечение (прошивка) для PIC12F629 можно загрузить здесь.