Как работает шаговый двигатель
Как работает шаговый двигатель
В современной робототехнике очень часто применяются шаговые двигатели, даже ведущие мировые производители на четырёхосевых поворотных роботах типа SCARA устанавливают степперы производства компании KINCO Electric.
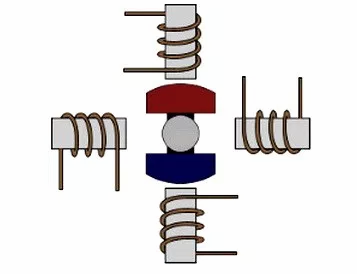
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
• Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
• Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
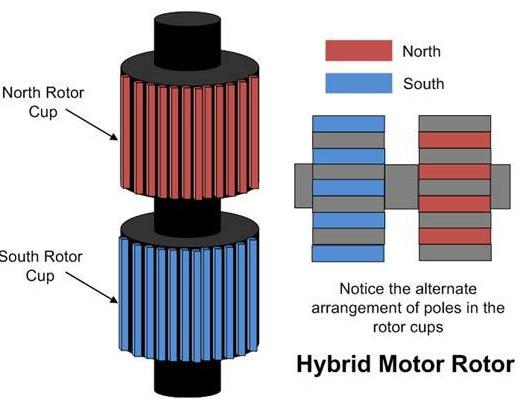
• Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
— Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
— Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал. 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным. 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы: Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт. Полушаговый режим — ротор поворачивается на ½ шага за 1 такт. Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Таким образом, после рассмотрения видов шаговых двигателей и их основных режимов работы, мы можем заключить, что двигатели данного типа справедливо используются для управления механикой в широком диапазоне применений, ввиду своей надёжности и невысокой стоимости при наличии приемлемых технических параметров.
Гибридные шаговые двигатели KIPPRIBOR серии SMO
Описание и назначение шаговых двигателей KIPPRIBOR серии SMO:
Гибридные шаговые двигатели KIPPRIBOR серии SMO – двигатели которые преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов фиксированный угол поворота. Используются в системах линейного перемещения, конструкциях роботов-манипуляторов, прочих конструкциях, требующих точного позиционирования исполнительных устройств и механизмов.
Основное достоинство шагового двигателя заключается в том, что точность позиционирования его ротора обеспечена конструкцией. При подаче управляющего импульса на драйвер, ротор двигателя совершает поворот на угол равный величине углового шага. Кроме того, шаговые двигатели KIPPRIBOR серии SMO могут работать в микрошаговом режиме.
Преимущества шаговых двигателей KIPPRIBOR серии SMO:
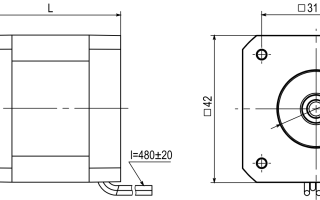
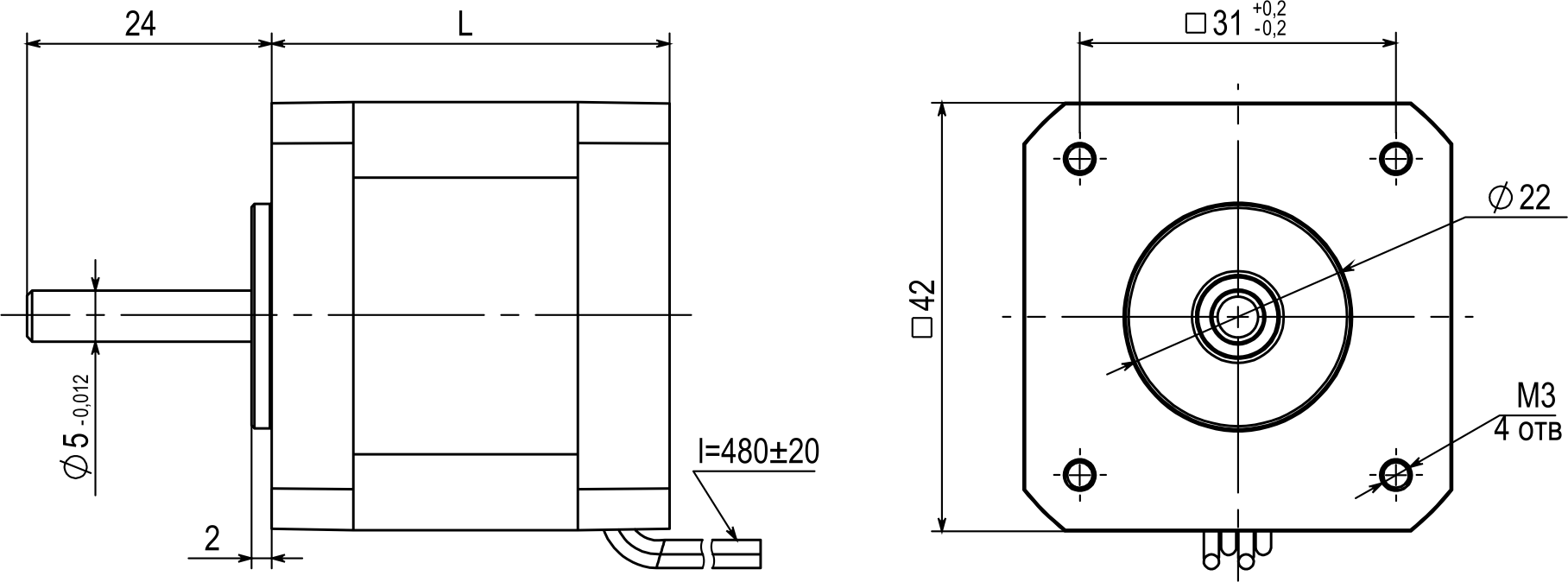
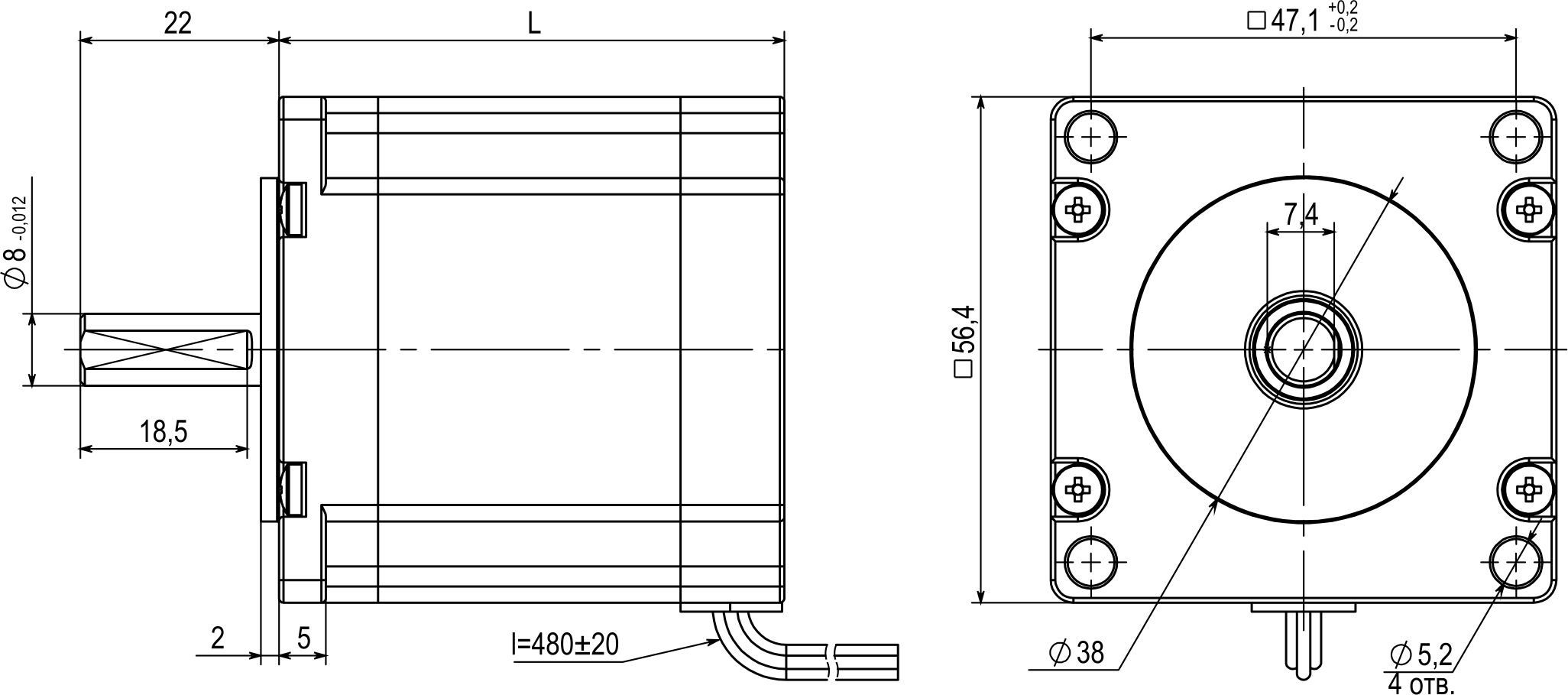
Двигатели серии SMO соответствуют стандарту National Environment Management Authority (NEMA). Линейка представлена наиболее востребованными габаритами двигателей: SMO-17 – NEMA17, SMO-23 – NEMA23, SMO-34 – NEMA34.
Отличаются надежностью и высоким эксплуатационным ресурсом.
Двигатели KIPPRIBOR серии SMO относятся к гибридному типу шаговых двигателей и сочетают в себе лучшие качества эволюционных предшественников: реактивных двигателей и двигателей с постоянными магнитами.
Для обеспечения точности позиционирования не требуют дополнительных элементов – датчиков, энкодеров. Таким образом снижается общая стоимость системы в целом.
Двигатели KIPPRIBOR серии SMO обладают высокими механическими характеристиками.
Серия представлена двигателями как с четырехвыводной, так и с восьмивыводной схемой соединения обмоток. 8-выводная схема является более гибкой при выборе вариантов подключения.
Общие технические характеристики гибридных шаговых двигателей KIPPRIBOR серии SMO:
| Серия | SMO-17 | SMO-23 | SMO-34 |
| Ширина фланца | 42 мм (NEMA17) | 57 мм (NEMA23) | 86 мм (NEMA34) |
| Количество фаз обмотки | 2 | ||
| Угловой шаг | 1,8° | ||
| Радиальное биение вала | ≤0,02 мм | ||
| Осевой разбег вала | ≤0,08 мм | ||
| Максимальная радиальная нагрузка (на расстоянии 20 мм от фланца) | 28 Н | 75 Н | 220 Н |
| Максимальная осевая нагрузка | 10 Н | 15 Н | 60 Н |
| Тип электрического подключения | Кабельный вывод ( | ||
Модификации гибридных шаговых двигателей KIPPRIBOR серии SMO-17:
Удержива-
ющий момент, кг*см
Модификации гибридных шаговых двигателей KIPPRIBOR серии SMO-23:
Удержива-
ющий момент, кг*см
Модификации гибридных шаговых двигателей KIPPRIBOR серии SMO-34:
Удержива-
ющий момент, кг*см
SMO-17
SMO-23
SMO-34
* – значение L (длина двигателя) смотрите в таблице модификаций для двигателей соответствующего габарита.
Модификации с 4 выводами
Модификации с 8 выводами
| Модель шагового двигателя KIPPRIBOR | Драйверы, снятые с производства | Обновленная линейка | Обновленная линейка (специальные драйверы) | |||||||||
| SMD–M430D | SMD–DM542 | SMD–M545D | SMD–DM556D | SMD–M860D | SMD–DM860D | SMD–2O.17.16.R2 | SMD–2O.24.40 | SMD–2O.34.60 | SMD–2O.24.40.IO | SMD–2O.24.40.IR | SMD–2O.24.40.2IR | |
| SMO–17.H218S.3K20.040.4K.034 | V | |||||||||||
| SMO–17.H218S.2K80.084.4K.034 | V | |||||||||||
| SMO–17.H218S.2K80.170.4K.034 | V | V | ||||||||||
| SMO–17.H218S.4K20.040.4K.040 | V | |||||||||||
| SMO–17.H218S.4K50.080.4K.040 | V | |||||||||||
| SMO–17.H218S.5K20.120.4K.040 | V | V | ||||||||||
| SMO–17.H218S.4K00.168.4K.040 | V | V | ||||||||||
| SMO–17.H218S.4K00.170.4K.040 | V | V | ||||||||||
| SMO–17.H218S.4K50.040.4K.048 | V | |||||||||||
| SMO–17.H218S.5K00.100.4K.048 | V | V | ||||||||||
| SMO–17.H218S.5K50.130.4K.048 | V | V | ||||||||||
| SMO–17.H218S.5K50.150.4K.048 | V | V | ||||||||||
| SMO–17.H218S.5K20.168.4K.048 | V | V | ||||||||||
| SMO–17.H218S.7K00.150.4K.060 | V | V | ||||||||||
| SMO–23.H218S.5K50.100.4K.041 | V | V | ||||||||||
| SMO–23.H218S.5K00.200.4K.041 | V | V | V | V | V | |||||||
| SMO-23.H218S.8K20.150.4K.051 | V | V | V | V | V | |||||||
| SMO-23.H218S.9K00.200.4K.051 | V | V | V | V | V | |||||||
| SMO-23.H218S.13K5.150.4K.056 | V | V | V | V | V | |||||||
| SMO-23.H218S.12K6.280.4K.056 | V | V | V | V | V | |||||||
| SMO-23.H218S.12K0.300.4K.056 | V | V | V | V | V | |||||||
| SMO-23.H218S.19K0.280.4K.076 | V | V | V | V | V | |||||||
| SMO-23.H218S.20K0.300.4K.076 | V | V | V | V | V | |||||||
| SMO-23.H218S.20K0.400.4K.076 | V | V | V | V | V | |||||||
| SMO-23.H218S.22K0.300.4K.082 | V | V | V | V | V | |||||||
| SMO-23.H218S.20K0.400.4K.082 | V | V | V | V | V | |||||||
| SMO-23.H218S.25K0.300.4K.100 | V | V | V | V | V | |||||||
| SMO-23.H218S.25K0.400.4K.100 | V | V | V | V | V | |||||||
| SMO-23.H218S.30K0.300.4K.112 | V | V | V | V | V | |||||||
| SMO-23.H218S.28K0.350.4K.112 | V | V | V | V | V | |||||||
| SMO-23.H218S.30K0.400.4K.112 | V | V | V | V | V | |||||||
| SMO-34.H218S.35K0.400.4K.078 | V | V | ||||||||||
| SMO-34.H218S.45K0.420.4K.078 | V | V | ||||||||||
| SMO-34.H218S.45K0.600.8K.078 | V | V | V | |||||||||
| SMO-34.H218S.45K0.450.4K.082 | V | V | V | |||||||||
| SMO-34.H218S.50K0.560.8K.082 | V | V | V | |||||||||
| SMO-34.H218S.68K0.500.4K.100 | V | V | V | |||||||||
| SMO-34.H218S.65K0.500.8K.100 | V | V | V | |||||||||
| SMO-34.H218S.60K0.500.4K.118 | V | V | V | |||||||||
| SMO-34.H218S.85K0.600.4K.118 | V | V | V | |||||||||
| SMO-34.H218S.85K0.500.8K.118 | V | V | V | |||||||||
| SMO-34.H218S.85K0.560.8K.118 | V | V | V | |||||||||
| SMO-34.H218S.100K.500.4K.156 | V | V | V | |||||||||
| SMO-34.H218S.122K.620.4K.156 | V | V | V | |||||||||
| SMO-34.H218S.120K.490.8K.156 | V | V | V | |||||||||
| SMO-34.H218S.120K.560.8K.156 | V | V | V | |||||||||
Структура условного обозначения при заказе гибридных шаговых двигателей KIPPRIBOR серии SMO:
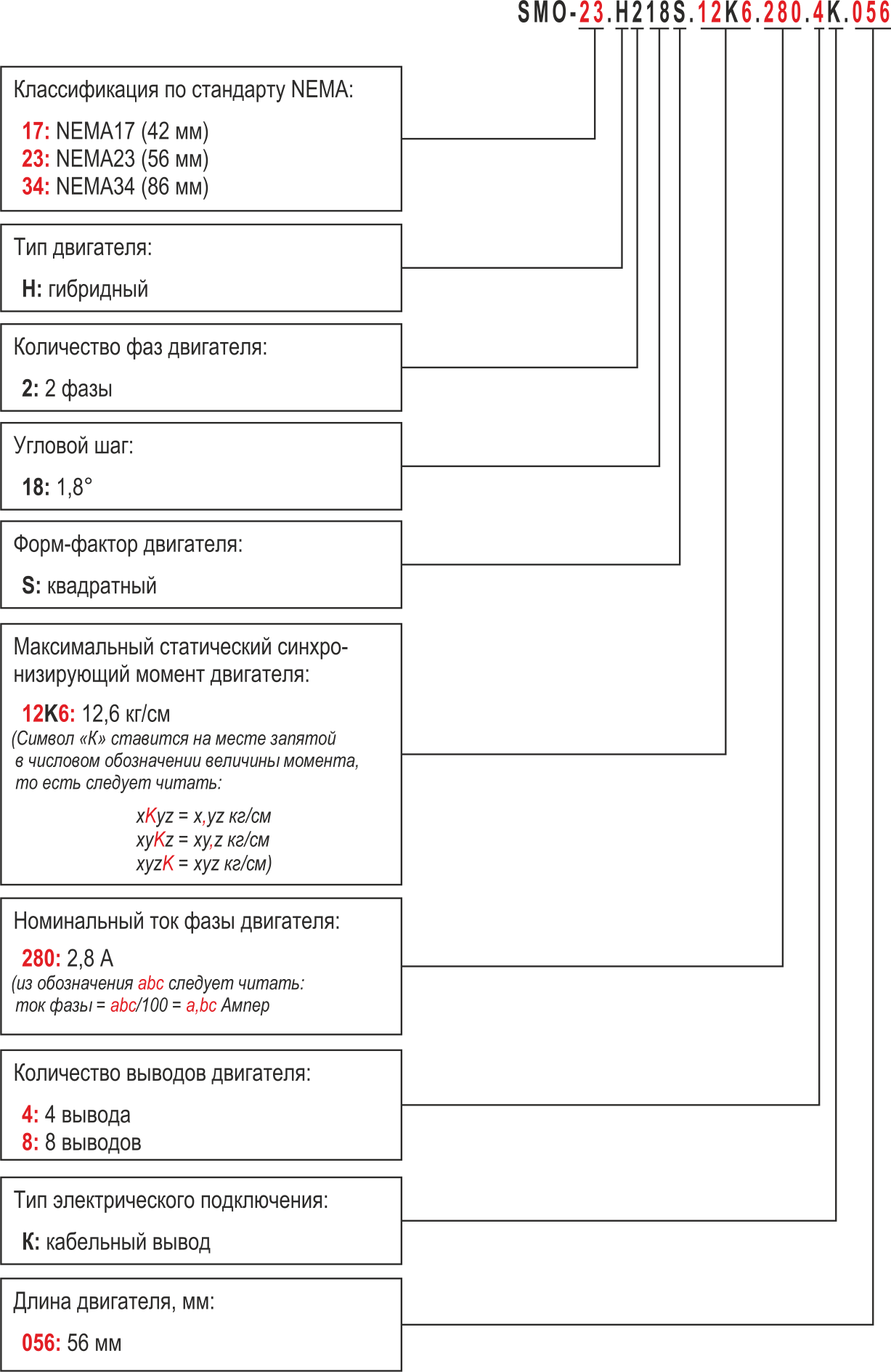
Например: SMO-23.H218S.12K6.280.4K.056
Вы заказали: гибридный шаговый двигатель KIPPRIBOR серии SMO-23, фланец 56 мм, 2-фазный с угловым шагом 1,8°, квадратного исполнения, максимальный статический синхронизирующий (удерживающий) момент 12,6 кг/см, номинальный ток фазы 2,8 А, обмотка с 4 выводами, длина 56 мм.
Документация
Реализуйте модель шагового двигателя
Библиотека
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
Описание
Блок Stepper Motor (STM) реализует типовую модель, которая представляет два самых популярных семейства шаговых двигателей:
Шаговые двигатели переменного нежелания
Постоянный магнит или гибридные шаговые двигатели
Модель Stepper Motor состоит из электрических и механических разделов. Электрический раздел представлен эквивалентной схемой, настройка которой зависит от моторного типа. Эквивалентные схемы принимают, что магнитная схема линейна (никакое насыщение), и взаимная индуктивность между фазами незначительна. Механический раздел представлен моделью в пространстве состояний на основе момента инерции и коэффициента вязкого трения.
Этот рисунок показывает эквивалентную схему для одной фазы в шаговом двигателе переменного нежелания.
В этой модели Ra и La ( θ), соответственно, представляют сопротивление и индуктивность фазы обмотка. Извилистая индуктивность варьируется в зависимости от положения ротора:
L является средней индуктивностью.
L 1 является максимальным изменением индуктивности.
Nr является зубным номером ротора.
В ссылочном положении ( θ = 0), зуб ротора полностью выравнивается с полюсом A-оси, чтобы достигнуть максимальной A-фазы извилистая индуктивность.
Общий электромагнитный крутящий момент, произведенный двигателем, является суммой крутящих моментов, произведенных моторными фазами:
T e = ∑ x = 1 m 0.5 i x 2 d L x d θ ,
m является количеством фаз.
ix является обмоткой, текущей в фазе x.
Lx является функцией индуктивности обмотки фазы x.
Этот рисунок показывает эквивалентную схему для одной фазы в постоянном магните (PM), или гибридный шаговый двигатель.
В этой модели Ra и La, соответственно, представляют сопротивление и индуктивность обмотки A-фазы. Из-за большого значения воздушного зазора, введенного магнитами, извилистая индуктивность премьер-министра или гибридного шагового двигателя может считаться независимой от положения ротора. Исходный ea напряжения ( θ) представляет моторную противоэлектродвижущую силу (EMF), который является синусоидальной функцией положения ротора:
e a ( θ ) = − p ψ m sin ( p θ ) d θ d t ,
p является количеством пар полюса. Количество пар полюса p дано p = Nr/2.
ψm является моторным максимальным магнитным потоком.
Обратите внимание на то, что в ссылочном положении ( θ = 0), Северный полюс на роторе полностью выравнивается с полюсом A-оси, чтобы достигнуть нулевого значения коэффициента противо-ЭДС A-фазы.
Электромагнитный крутящий момент, произведенный двухфазным PM или гибридным шаговым двигателем, равен сумме крутящего момента, следующего из взаимодействия токов фазы и магнитных потоков, созданных магнитами и крутящим моментом стопора, который следует из выступа ротора:
m является количеством фазы ( m =2) двигателя.
Nr количество зубов на роторе ( Nr = 2* p).
Параметры
Постоянный магнит / гибрид
Выберите Permanent-magnet/Hybrid (значение по умолчанию), чтобы реализовать премьер-министра или гибридный шаговый двигатель.
Number of phases
Выберите 2 (значение по умолчанию) или 4 фазы.
Индуктивность, La, в H, каждой обмотки фазы. Значением по умолчанию является 10e-3 .
Сопротивление, Ra, в Омах, каждой обмотки фазы. Значением по умолчанию является 1.2 .
Угол шага, в градусах, перемещения ротора. Значением по умолчанию является 30 .
Maximum flux linkage
Максимальное потокосцепление, ψm, в V.s, произведенном магнитами. Значением по умолчанию является 0.04 .
Maximum detent torque
Максимальный крутящий момент стопора, Tdm, в N.m, следуя из выступа ротора. Значением по умолчанию является 0.02 .
Общий импульс инерции, J, в kg.m2 , двигателя и загрузки. Значением по умолчанию является 1e-4/5 .
Total viscous friction coefficient
Общий коэффициент вязкого трения, B, в N.m.s, двигателя и загрузки. Значением по умолчанию является 1e-3 .
Начальная скорость вращения, ω0, в rad/s. Значением по умолчанию является 0 .
Начальное положение ротора, Θ0, в градусах. Значением по умолчанию является 0 .
Sample time (-1 for inherited)
Задайте шаг расчета шагового двигателя в s. Задайте –1 наследовать шаг расчета блока powergui в вашей модели. Значением по умолчанию является –1 .
Переменное нежелание
Выберите Variable reluctance реализовывать шаговый двигатель переменного нежелания.
Number of phases
Выберите 3 , 4 , или 5 фазы.
Maximum winding inductance
Максимальная индуктивность, Lmax, в H, каждой обмотки фазы. Значением по умолчанию является 10e-3 .
Minimum winding inductance
Минимальная индуктивность, Lmin, в H, каждой обмотки фазы. Значением по умолчанию является 2e-3 .
Сопротивление, Ra, в Омах, каждой обмотки фазы. Значением по умолчанию является 1.2 .
Угол шага, в градусах, перемещения ротора. Значением по умолчанию является 30 .
Общий импульс инерции, J, в kg.m2 , двигателя и загрузки. Значением по умолчанию является 1e-4/5 .
Общий коэффициент вязкого трения, B, в N.m.s, двигателя и загрузки. Значением по умолчанию является 1e-3 .
Начальная скорость вращения, ω0, в rad/s. Значением по умолчанию является 0 .
Начальное положение ротора, Θ0, в градусах. Значением по умолчанию является 0 .
Sample time (-1 for inherited)
Задайте шаг расчета шагового двигателя в s. Задайте –1 наследовать шаг расчета блока powergui в вашей модели. Значением по умолчанию является –1 .
Вводы и выводы
Механический крутящий момент нагрузки, в N.m. TL положительно в моторной операции и отрицателен в работе генератора.
Выход Simulink ® блока является вектором, содержащим пять сигналов. Можно демультиплексировать эти сигналы при помощи блока Селектора Шины, обеспеченного в Библиотеке Simulink.
Электромагнитный крутящий момент
Как получить параметры шагового двигателя
Параметры, используемые в модели степпера, обычно получаются из таблиц данных производителя. В случае, если параметры не доступны, можно определить их из экспериментальных измерений.
Параметры шагового двигателя переменного нежелания
Параметры, обеспеченные таблицами данных производителя, обычно: количество фаз, содержа крутящий момент, угол шага, напряжение на фазу, текущую на фазу, сопротивление обмотки, Ra, максимальную индуктивность, Lmax, среднюю индуктивность, L0, и инерцию ротора, J.
Параметры Шагового двигателя постоянного магнита/Гибрида
Параметры, обеспеченные таблицами данных производителя, обычно:
содержание крутящего момента
напряжение на фазу
текущий на фазу
сопротивление обмотки, Ra
извилистая индуктивность, La
инерция ротора, J
Максимальный крутящий момент стопора, Tdm, не всегда задается. Этот параметр может быть принят, чтобы быть равным 1-10% максимального крутящего момента содержания.
Максимальное потокосцепление, ψm, не всегда задается. Этот параметр может быть получен экспериментально путем управления двигателем к постоянной скорости, N, в об/мин, и путем измерения максимальной разомкнутой цепи извилистое напряжение, Em, в V.
Параметр ψm затем вычисляется следующим отношением:
где p является количеством пар полюса, данных p =360 / (2 m · шаг. Здесь m = номер фазы, продвиньтесь = угол шага в градусах.
Примеры
power_steppermotor пример иллюстрирует работу диска шагового двигателя с помощью двухфазной гибридной модели шагового двигателя.
Ссылки
[1] Т. Кенджо, А. Сугоара, шаговые двигатели и их микропроцессорные управления, 2-й выпуск, издательство Оксфордского университета, Оксфорд, 2003.
[2] П. Акарнли, Шаговые двигатели — руководство по теории и практике, 4-му Выпуску, Учреждению Инженеров-электриков, Лондона, 2002.
Документация Simscape Electrical
- Примеры
- Блоки и другая ссылка
- Информация о релизах
- PDF-документация
Поддержка
- MATLAB Answers
- Помощь в установке
- Отчеты об ошибках
- Требования к продукту
- Загрузка программного обеспечения
© 1994-2021 The MathWorks, Inc.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста — например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
Ардуино и шаговый двигатель: основы, схемы, подключение и управление
Шаговые двигатели используют для управления положением чего-либо, или для вращения рабочего узла с заданной скорости и на заданный угол. Такие особенности сделали возможным его применение в робототехнике, станках с числовым программным управлением (ЧПУ), и других системах автоматизации. В этой статье мы рассмотрим ряд вопросов связанных с устройством шаговых двигателей и способами их управления с помощью микроконтроллера Arduino.
Шаговый двигатель отличия от обычного
Все используемые на практике электродвигатели работают за счет электродинамических явлений и процессов происходящих в магнитных полях роторов и статоров. Как мы уже упомянули, любой двигатель состоит как минимум из двух частей – подвижной (ротор) и неподвижной (статор). Для его вращения нужно чтобы и магнитное поле тоже вращалось. Поле ротора вращается вслед за полем статора.
В принципе, таких базовых сведений достаточно для понимания общей картины работы электрических двигателей. Однако на самом деле промышленность производит различные варианты электродвигателя, среди которых:
1. Асинхронный двигатель с короткозамкнутым или с фазным ротором.
2. Синхронный двигатель с обмотками возбуждения или с постоянными магнитами.
3. Двигатель постоянного тока.
4. Универсальный коллекторный двигатель (работает и на постоянном токе и на переменном, ведь обмотки ротора сами подключаются и отключаются от контактов источника питания за счет конструкции ламелей и якоря).
5. Бесщеточные двигатели постоянного тока (BLDC).
7. Шаговые двигатели.
Последние два вида несут особую ценность, благодаря возможности их, в определенной степени, точного позиционирования в пространстве. Давайте подробнее рассмотрим конструкцию шагового двигателя.
Определение
Шаговым двигателем называется бесщеточный электродвигатель синхронного типа. На статоре расположено определенное число обмоток, подключение которых вызывает поворот ротора на определенный угол, зависящий от числа шагов. Другими словами ток в обмотке статора вызывает поворот вала на дискретный угол.
При равномерной и последовательной смене полярностей напряжения на обмотках и переключении запитанных обмоток происходит вращение шагового двигателя, подобно обычному электродвигателю, хотя на самом деле просто происходит регулярный поворот на фиксированный угол.
Шаговый двигатель иногда называют двигателем с конечным количеством положений ротора. Звучит не совсем понятно, давайте разберемся. Представим обычный двигатель – положение его ротора никак не фиксируется, то есть он просто вращается пока подключено питание, а когда оно отключается, то останавливается через какое-то время, зависящее от его инерции. Положений ротора может быть сколько угодно много, а отличаться они могут на мельчайшие доли градуса.
В шаговом двигателе подключение обмотки или нескольких обмоток вызывает «примагничивание» ротора по отношению к этим обмоткам. Внешне это выглядит именно как поворот вала на определенный угол (шаг). Так как количество шагов является одной из важных характеристик этого типа электропривода, то и количество положений ротора равно количеству шагов. Новичкам сложно понять, как это может быть, и как он в таком случае вращается – на самом деле все достаточно просто, мы это покажем на иллюстрациях и описаниях ниже.
Конструкция
На статоре электродвигателя закреплены обмотки возбуждения. Его ротор выполняется из магнитомягких или магнитотвердых материалов. От материала ротора зависит крутящий момент и фиксация вала при обесточенных обмотках. Эти параметры могут быть критичными.
Поэтому выделяют магнитотвердые роторы (они же на постоянных магнитах) и магнитомягкие (реактивные) роторы, кроме них есть и гибридные роторы.
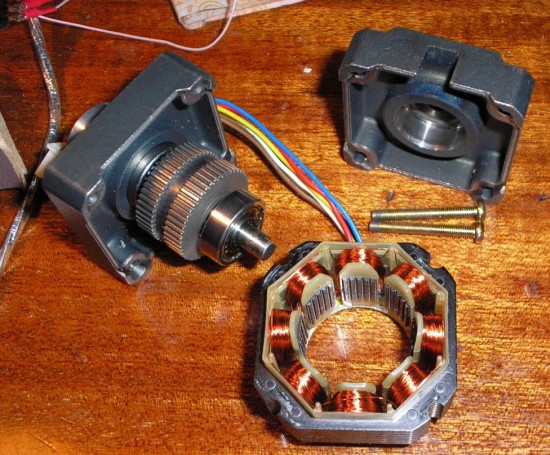
Гибридный ротор делают зубчатым, количество зубцов соответствует количеству шагов. Зубцы расположены вдоль оси ротора. При этом такой ротор разделен на две части поперек. Между ними установлен постоянный магнит, таким образом, каждая из половин ротора является полюсом магнита. Также следует сказать, о том, что половины ротора повернуты на половину шага зубцов друг относительно друга.
Как уже было сказано, такой двигатель является синхронным, так и процесс его вращения заключается в создании вращающего поля ротора, за которым стремится магнитный ротор, а это реализовывается за счет переключения контроллером обмоток поочередно.
Виды шаговых двигателей ШД по конструкции обмоток делят на три основных группы по схеме подключения обмоток:
3. С четырьмя обмотками.

Биполярные электродвигателя в большинстве своем имеют 4 контакта – это выводы с двух обмоток. Внутри двигателя они по большому счету никак не соединены между собой. Основной проблемой является то, что нужно обеспечить переключение полярности питания, это значит, что драйвер и сам процесс управления усложнится.
Униполярные напоминают соединение обмоток по схеме звезды. Другими словами, у вас есть 5 выводов – 4 из них это концы обмоток, а 1 – точка соединения всех обмоток.
Для управления таким двигателем нужно просто подавать поочередно питание на каждый из концов обмотки (или их пару, в зависимости от выбранного режима вращения), таким образом будет запитываться каждый раз половинка обмотки. Может работать в биполярном режиме, если запитывать полностью всю обмотку минуя отвод от её середины.
Двигатели с 4 обмотками имеют преимущество в том, что вы можете подключить обмотки любым удобным для вас образом и получить как биполярный, так и униполярный двигатель.
Режимы управления
Различают 4 основных режима управления шаговым двигателем:
1. Волновое управление.
Волновым управлением называют управление одной обмоткой. Т.е. одновременно ток течет через одну из обмоток, отсюда две отличительных черты – низкое энергопотребление (это хорошо) и низкий крутящий момент (это плохо).
В данном случае этот двигатель делает 4 шага за один оборот. Реальные же двигатели делают десятки шагов за один оборот, это достигается бОльшим количеством чередований магнитных полюсов.
Полношаговое управление является наиболее часто используемым. Здесь напряжение подается не на одну обмотку, а на две сразу. Если обмотки соединены параллельно – то ток удваивается, а если последовательно, то удваивается напряжение питания соответственно. С одной стороны в таком методе управления двигатель потребляет больше энергии, с другой – крутящий момент 100%, в отличие от предыдущего.
Полушаговое управление интересно тем, что становится возможным более точное позиционирование вала двигателя, благодаря к тому, что к целым шагам добавляются еще и половинки это достигается совмещение предыдущих двух режимов работы, а обмотки чередуются, то включаясь попарно, то по одной.
Стоит учесть, что момент на валу плавает от 50 до 100% в зависимости от того 1 или 2 две обмотки задействованы в данный момент.
Еще более точным является микрошаговый. Он похож на предыдущий, но отличается тем, что питание на обмотки подаётся не полной величины, а постепенно изменяющейся. Таким образом, изменяется степень воздействия на ротор каждой из обмоток и плавно изменяется угол поворота вала в промежуточных шагам положениях.

Где взять шаговый двигатель
Купить шаговый двигатель вы успеете всегда, но настоящие радиолюбители, самодельщики и электронщики славятся тем, что могут из мусора сделать что-то полезное. Наверняка, у вас дома найдется хотя бы один шаговый двигатель. Давайте разберемся, где нужно искать, чтобы найти такой двигатель.
1. Принтера. Шаговые двигатели могут стоять на вращении вала подачи бумаги (но может быть и двигатель постоянного тока с датчиком перемещения).
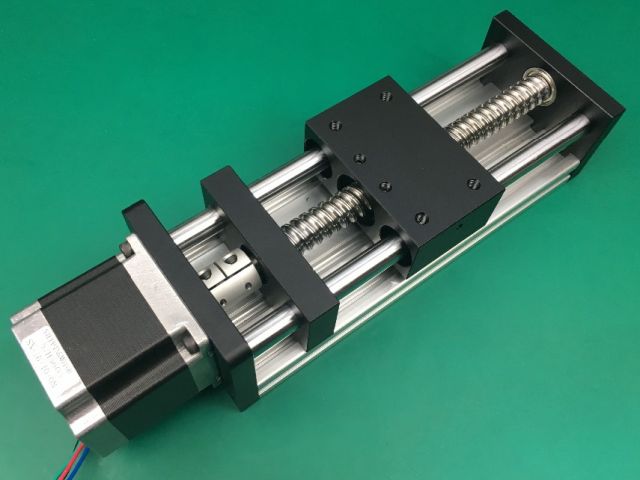
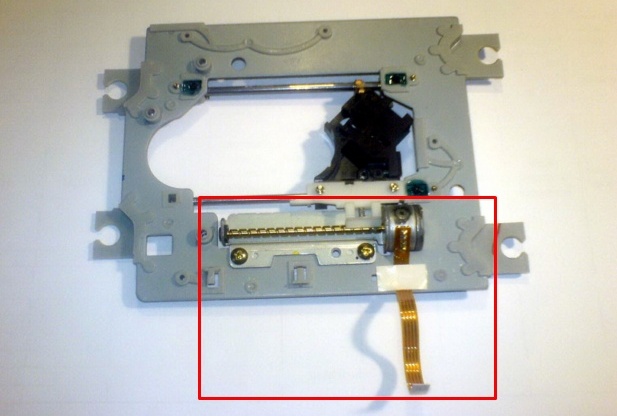
2. Сканеры и МФУ. В сканерах часто устанавливают шаговый двигатель и механическую часть, направляющую вдоль которой ходит каретка, эти детали также могут стать полезны при разработке самодельного ЧПУ станка.
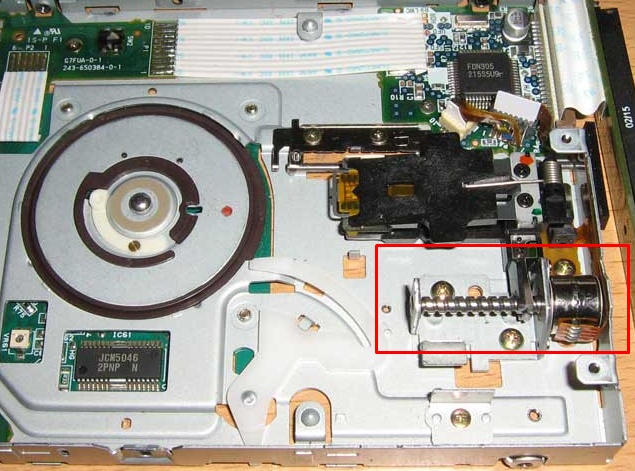
3. CD и DVD приводы. В них также можно достать и штанги и винтовые валы для самоделок и различных ЧПУ.
4. Floppy-дисководы. В дискетниках также есть шаговые двигатели, особо ценятся флопики формата 5.25”.
Драйвер для шагового двигателя
Для управления шаговыми двигателями используют специализированные микросхемы-драйвера. В большинстве своем это H-мост из транзисторов. Благодаря такому включению появляется возможность включать на обмотку напряжение нужной полярности. Эти микросхемы подходят и для управления двигателями постоянного тока с поддержкой изменения направления вращения.
В принципе очень маленькие двигателя можно запустить и прямо от пинов микроконтроллера, но обычно они выдают до 20-40 мА, чего в большинстве случае недостаточно. Поэтому приведем несколько примеров драйверов для шаговых двигателей:
1. Платы на базе L293D. Их множество, одна из таких продается под отечественной маркой «Амперка» под название Troyka Stepper, пример его использования в реальном проекте приведен на видео ниже. Преимущество конкретно этой платы в том, что на ней расположены микросхемы логики которые позволяют сократить количество используемых для управления пинов.
Сама по себе микросхема работает под напряжение 4.5-36В и выдает ток до 600мА-1А в зависимости от корпуса ИМС.
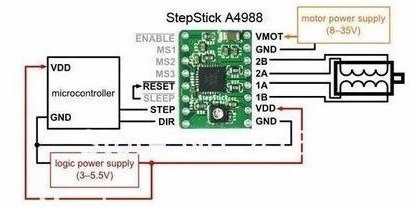
2. Драйвер на базе A4988. Питается напряжением до 35В, выдерживает ток до 1А без радиатора, а с радиатором до 2А. Может управлять двигателем, как целыми шагами, так и частями – от 1/16 шага до 1 шага, всего 5 вариантов. Содержит два H-моста. С помощью подстроечного резистора (видно на правом фото) можно задавать выходной ток.
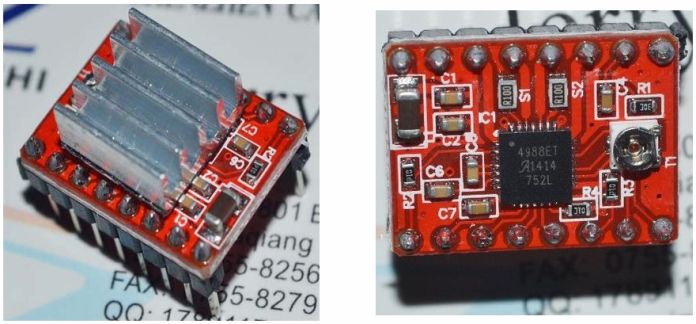
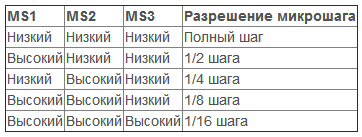
Размер шага задается сигналами на входах MS1, MS2, MS3.
Вот схема его подключения, каждый импульс на входе STEP задает поворот двигателя на 1 шаг или на микрошаг.
3. Драйвер на базе ULN2003 работает с двигателями на 5 и на 12В и выдаёт ток до 500 мА. На большинстве плат расположены 4 светодиода индицирующих работу каждого из каналов.
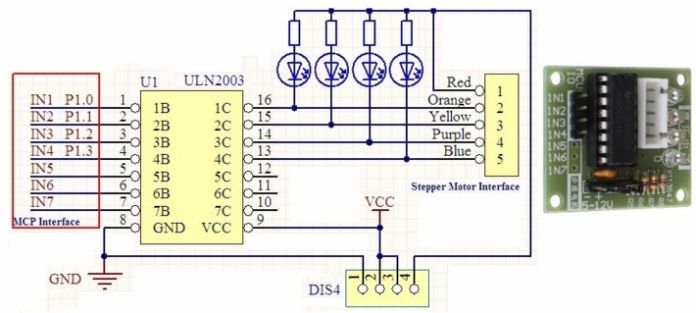
Также на плате вы можете видеть клеммную колодку для подключения двигателей, кстати, многие из них продаются именно с таким разъёмом. Примером такого двигателя является 5В модель – 28BYJ-48.
И это не все варианты драйверов для шаговых двигателей, на самом деле их еще больше.
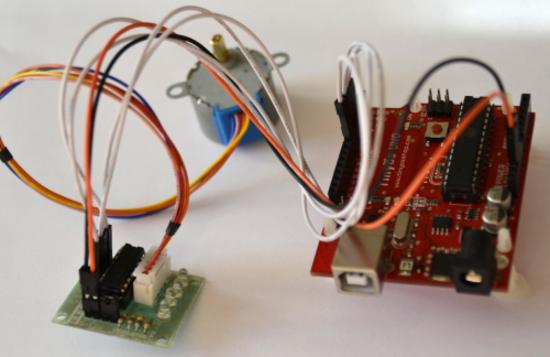
Подключение к Arduino драйвера и шагового двигателя
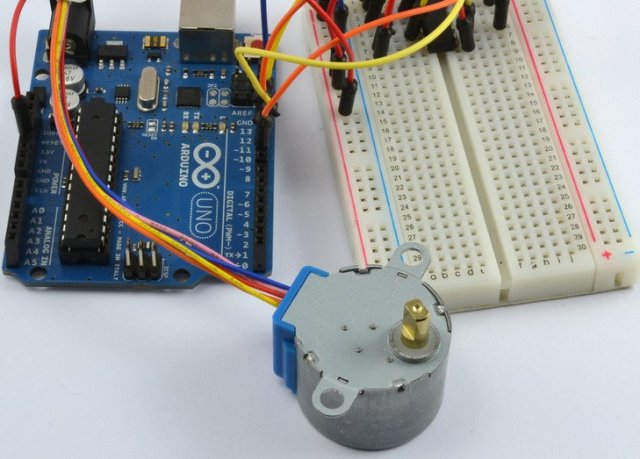
В большинстве случаев нужно использовать микроконтроллер в паре с драйвером для шагового двигателя. Давайте рассмотрим схему подключения и примеры программного кода. Рассмотрим подключение на базе последнего приведенного драйвера – ULN2003 к плате Arduino. И так у него есть 4 входа, они подписаны, как IN1, IN2 и т.д. Их нужно соединить с цифровыми пинам платы ардуино, а к драйверу подсоединить моторчик как показано на рисунке ниже.
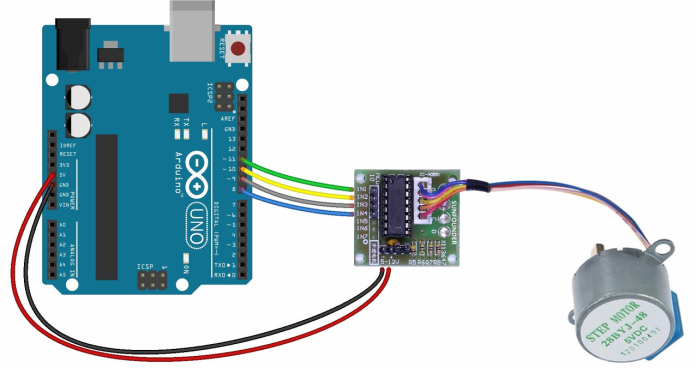
Далее в зависимости от способа управления вы должны подавать на входы 1 или 0 с этих пинов включая 1 или 2 обмотки в нужно последовательности. Код программы полношагового управления выглядит примерно так: