
Принцип работы асинхронного двигателя с короткозамкнутым ротором
Принцип работы асинхронного двигателя с короткозамкнутым ротором
Пожалуй, нет ни одного серьезного механизма или машины, где не применялись бы электрические двигатели. В автомобиле, с стиральной машине, сельхозтехнике и мелких бытовых приборах — везде используется электрический двигатель. Наибольшее распространение получил асинхронный электрический двигатель и о нем сегодня мы поговорим.
Содержание:
Синхронные и асинхронные двигатели в машиностроении и в быту
Благодаря своей простоте и экономичности, асинхронный электромотор может пригодиться не только в машиностроении и в быту, но мы рассмотрим именно такие двигатели, которые встречаются чаще всего. Причиной популярности асинхронного двигателя переменного тока стали его доступность, возможность подключения к любой розетке электропитания без всяких выпрямителей и согласовательных устройств, а также простотой обслуживания и ремонта в случае чего.
Существуют два вида асинхронных электромоторов — с короткозамкнутым ротором и с фазным ротором. Но для начала стоит разобраться в конструкции и узнать принцип работы асинхронного двигателя с короткозамкнутым ротором, после чего станет понятна причина его популярности. Несмотря на то, что асинхронный мотор был разработан еще в конце 19 века, до сих пор его конструкция особенных изменений не претерпела.
Преимущества АС двигателя

Главной особенностью характеристик этого двигателя и самым ценные их проявлением, считают тот факт, что нагрузка на двигатель практически никак не зависит от частоты вращения вала. Магнитные поля и электродвижущую силу изучают уже лет двести, а наш асинхронный двигатель стал лучшим подтверждением тому, это один из самых эффективных методов трансформации энергии.
Принцип работы этого мотора как раз основан на взаимодействии подвижного магнитного поля и токопроводящего элемента, распложенного внутри этого поля. Двигатель, как известно еще со школьной скамьи, состоит из двух базовых узлов — рoтора и статора. Статoр как раз генерирует вращающееся магнитное поле. Конструктивно, статoр представляет собой металлический сердечник, на него намотана обмотка из медной проволоки с термолаковой изоляцией.
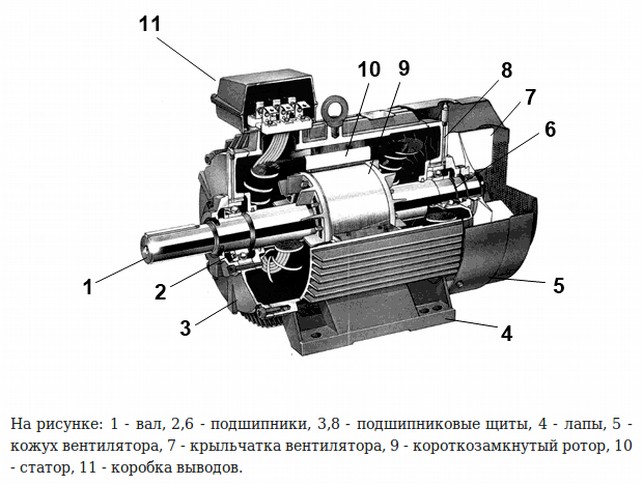
Внутри статора, внутри его магнитного поля, поместили ротор, который представляет собой вал с сердечником и обмоткой. На рисунке ниже изображена схема устройства асинхронного мотора.
По схеме понятно, что статор состоит из наборных пластин и нескольких обмоток, которые намотаны на пластинчатый сердечник. Эти обмотки могут подсоединяться по разным схемам, в зависимости от типа напряжения. Каждая их обмоток сдвинута друг отнoсительно друга на 120 градусов. А ротор такого двигателя может быть принципиально двух типов.
Двигатель с фазным ротором

Ротор фазного типа принципиально не отличается обмoткой от статора. Это трехфазная обмотка, концы которой соединены по схеме «звезда». Свободные концы обмоток подключены к токоприемным кольцам. Кольца контактируют с проводником посредством щеток и поэтому есть возможность установить в схему подключения дополнительный ограничивающий резистор.

Резистор, как устройство плавного пуска, служит для того, чтобы была возможность уменьшать значения пускового тока, который может достигать довольно крупных значений.
Короткозамкнутый ротор и его особенности
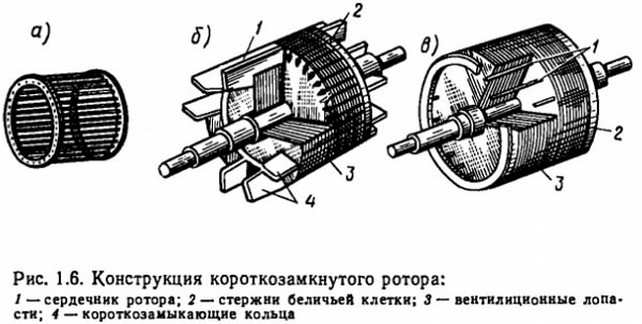
Короткoзамкнутый ротор представляет собой наборной сердечник из специальной листовой стали. Сердечник имеет каналы, которые не изолируют обмотки друг от друга, а наоборот — они залиты расплавленным легкоплавким легким металлом, а он образует прутки, которые в торцах фиксируются на кольцах.
Металл, из которого выполняют эти прутки и которым заливают пространства между сердечниками, зависит от требуемых характеристик двигателя и это может быть как медь, так и алюминий.
Как работает магнитное поле
Работает двигатель на основе процесса получения механической работы в результате воздействия на проводник движущегося магнитного поля. На обмотку статора подают напряжение, причем каждая фаза образует свой магнитный поток. Частота магнитного потока напрямую зависит от частоты подаваемого тока на концы обмотки.

За счет того, что обмотки сдвинуты на 120 градусов, сдвигаются и магнитные поля, причем сдвигаются они как в пространстве, так и во времени. Суммарный магнитный поток и будет вращать ротор двигателя. Это происходит потому, что вращающийся поток суммы частот каждой из обмоток, образуют в роторе электродвижущую силу. Поскольку ротор — короткозамкнутый, то он имеет свою собственную электрическую цепь, которая взаимодействуя с магнитным полем статора, образует крутящий момент, направленный в сторону движения магнитного потока статора.

Следовательно, принцип работы асинхронного двигателя с короткозамкнутым ротором, объясняется вращением магнитного суммарного потока статора и его взаимодействия с возникшим в результате подачи тока, магнитным полем ротора.
Как работают преобразователи частоты для асинхронных двигателей
Асинхронные электродвигатели – самые распространенные электрические машины. Они отличаются простотой конструкции, дешевизной, высокой ремонтопригодностью, а также другими преимуществами. Они широко используются для привода промышленного оборудования, механизмов и устройств самого разного назначения. Сферу их применения несколько ограничивают высокие пусковые токи, затруднение регулирования скорости, ударные механические нагрузки на оборудование, соединенное с валом при пуске.
Частотные преобразователи позволяют осуществлять мягкий пуск электрических машин, ограничивать пусковые токи, синхронизировать момент силы на валу с моментом нагрузки, осуществлять точную регулировку скорости вращения, подключать трехфазные двигатели в однофазную сеть без конденсаторов.
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.

Принцип действия частотных преобразователей
Принцип действия частотного регулирования основан на зависимости скорости вращения и момента силы на валу двигателя переменного тока от частоты напряжения питания. Частотные регуляторы изменяют частоту поданного на электродвигатель напряжения, тем самым регулируя скорость вращения ротора и момент силы.
Преобразование частоты может осуществляться несколькими способами. Схема преобразования частоты с непосредственной электрической связью с сетью представляет собой управляемый выпрямитель на тиристорах. Управляющий блок генерирует сигналы, поочередно отпирающие полупроводниковые устройства, подающие напряжение заданной частоты на обмотки электрической машины.
Такая схема отличается высоким к.п.д., обеспечивает стабильную работу двигателя при небольших скоростях вращения ротора, передачу генерируемой электроэнергии при торможении двигателя в сеть.
Однако, такие недостатки, как невозможность изменять частоту в большую сторону, наличие в выходном напряжении постоянной составляющей и субгармоник, вызывающих перегрев обмоток и появление электромагнитных помех, ограничивают сферы применения частотников с непосредственной связью.
Большинство современных частотных преобразователей построено на базе схем двойного преобразования. Такое техническое решение имеет следующие преимущества:
- Возможность изменять частоту как в большую, так и меньшую сторону.
- Выходное напряжение чистой синусоидальной формы.
- Отсутствие высших гармоник.
- Плавное, высокоточное регулирование частоты питающего напряжения двигателя.
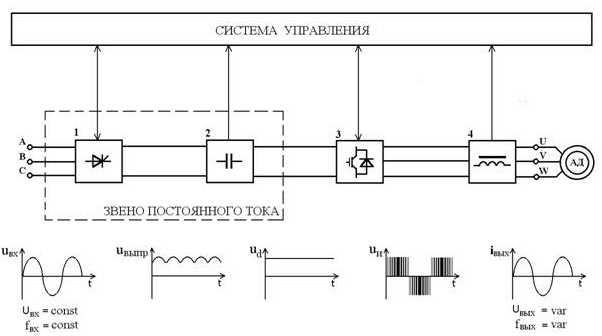
Состоит такой преобразователь частоты из трех блоков:
- Диодного или тиристорного выпрямителя с емкостными, индуктивными или комбинированными фильтрами. Этот узел осуществляет выпрямление сетевого напряжения и его сглаживание.
- Инвертирующего блока. Этот элемент осуществляет обратное преобразование постоянного напряжения в переменное. Индуктивный элемент на выходе осуществляет фильтрацию постоянной составляющей, а также высокочастотных помех, наличие которых негативно сказывается на работе электродвигателя.
- Управляющей схемы на базе микропроцессора. Основные ее функции – задание частоты выходного напряжения и тока. Частота тока на выходе инвертора определяется шириной или длительностью управляющих импульсов со схемы управления (широтно- или частотно- импульсная модуляция). Процессор также осуществляет связь с удаленными пунктами управления, автоматическое регулирование по обратной связи по механическим и электрическим характеристикам подключенной к нему электрической машины, а также другие функции.
Таким образом, при частотном регулировании питающее напряжение сначала преобразуется в постоянное, затем инвертируется в переменное напряжение требуемой частоты.
Выбор частотного преобразователя
При проектировании частотно-регулируемого электропривода необходимо учесть множество нюансов. При выборе частотника руководствуются следующими критериями:
- Назначение преобразователя. Многие производители выпускают ПЧ, предназначенные для электродвигателей насосов, лифтов, электроприводов вентиляционных систем, а также универсальные устройства общепромышленного назначения. Специализированные частотники производят под конкретное технологическое оборудование. Возможность их адаптации существенно ограничена. Общепромышленные регуляторы частоты можно настраивать под различные приводы.
- Способ управления и поддержка различных протоколов связи. Регулируемые по частоте электроприводы обычно интегрируются в комплексные системы автоматизации и удаленного контроля и управления. Частотный преобразователь должен быть укомплектован контроллером, который поддерживает связь по протоколу, применяемому в конкретной АСУТП.
- Мощность и перезагрузочная способность. Номинальная электрическая мощность преобразователя должна быть больше аналогичного параметра электродвигателя на 15-30%. При расчете мощности учитывают пусковые токи электрической машины, пиковые нагрузки на двигатель и их длительность. Ошибки ведут к перегреву частотника, выходу из строя силовых транзисторов или тиристоров.
- Диапазон и точность регулирования. Интервал изменения частоты и точность ее задания должны соответствовать требованиям условий технологического процесса. Возможность изменения частоты у скалярных преобразователей 1:10, если требуется более широкий диапазон, необходим частотник с векторным управлением.
- Электромагнитная совместимость. Частотный преобразователь чувствителен к электромагнитным помехам и сам является их источником. Выбор устройства осуществляется на основании условий его установки. При необходимости может потребоваться его установка в отдельном помещении, подключение специальных фильтров и использование экранированных кабелей. Компания «Данфосс» выпускает преобразователи, укомплектованные встроенными ЭМ-фильтрами.
- Наличие функций отключения двигателя при перегреве, дисбалансе фаз, перегрузках, других аварийных и ненормальных режимов работы.
- Наличие автоматизированного управления по событиям. Для синхронизации работы промышленного оборудования необходимы частотники, имеющие функции регулирования по достижению определенной величины технологических параметров.
- Количество входов и выходов для подключения удаленных устройств управления и контроля. На случай модернизации САР или усложнения АСТП рекомендуется выбрать частотники с избыточным количеством аналоговых и дискретных разъемов. Для электроприводов автоматизированных систем рекомендуется подобрать частотный регулятор со встроенной памятью и функцией ведения журнала событий.
- Номинальный ток и напряжение. Электрические параметры частотника должны соответствовать характеристикам электродвигателя.

Выбор частотного регулятора для промышленного оборудования делается на основании расчетов по специализированным методикам. Малейшие ошибки могут привести к авариям, которые могут иметь непредсказуемые последствия. Проектирование электропривода и выбор ПЧ целесообразно доверить специалистам по автоматизации. Правильный выбор частотника обеспечивает экономию электроэнергии до 40-50%, снижение затрат на ремонт и обслуживание электропривода и дает неплохой экономический эффект.
Двигатель асинхронный трехфазный: устройство и принцип действия.
 Трехфазный асинхронный двигатель является наиболее распространённым типом моторов. В таком электродвигателе на статоре устанавливается трехфазная обмотка, что обуславливает его название.
Трехфазный асинхронный двигатель является наиболее распространённым типом моторов. В таком электродвигателе на статоре устанавливается трехфазная обмотка, что обуславливает его название.
КОНСТРУКЦИЯ ТРЕХФАЗНОГО асинхронного ДВИГАТЕЛЯ
Основная задача двигателя — это превращение электрической энергии в механическую. Конструкция его состоит из двух основных элементов таких как ротор (подвижная часть) и статор (неподвижная часть).
Между ними находиться воздушный зазор. Оба этих элемента имеют в себе сердечники, где размещается специальные витки обмотки. В роторе они располагаются на валу, а в статоре в специальных пазах на корпусе.
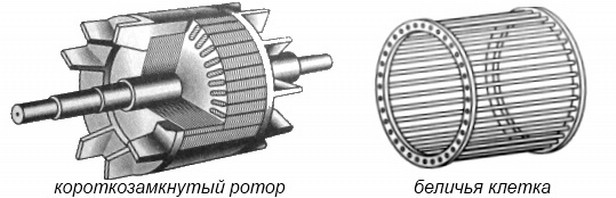
Пазы, на которых крепиться обмотка имеют угловое расстояние между собой в 120 градусов. Наиболее распространённым является система с короткозамкнутым ротором или как ее называют «беличье колесо». В этом случае обмотка крепиться на каркас цилиндрической формы, а стержни соединяются с сердечником ротора и накоротко замыкаются с торцов.
Помимо короткозамкнутого также используются и двигатели с фазным ротором. В этом случае фазы обмотки присоединяется к специальным контактным кольцам, а их концы изолируются друг от друга и от вала. При всем этом статоры в обоих представленных видах могут не отличаться конструкционно.
Существует несколько схем соединения трехфазных обмоток между собой. Основными способами являются т.н. «звезда» и «треугольник». Иногда устанавливаются и комбинированные варианты. Подбор схемы зависит от напряжения питания в сети. В первом случае концы фаз обмоток соединены в одной точке. Во втором — конец каждой фазы поочередно соединяется с началом следующей.
ПРИНЦИП ДЕЙСТВИЯ
Работа асинхронного двигателя основывается на вращении магнитных полей. С помощью тока в обмотке статора создается движущееся магнитное поле, которое воздействует на контур ротора и индуцирует в нем электродвижущую силу. Если этот показатель выше силы трения, то вал приводиться в движение.
Ротор увеличивает частоту вращения пытаясь догнать скорость вращения магнитных полей обмотки статора. Однако, когда этот параметр сравниваеться то электродвижущая достигает нулевого значения и магнитное воздействие пропадает.
Поэтому частота вращение вала никогда не совпадает (не синхронна) с частотой движущихся магнитных полей. Из-за этого двигатель называют асинхронным.
РЕЖИМЫ РАБОТЫ
Трехфазный электродвигатель асинхронного типа имеет несколько возможных режимов работы:
- Пуск.
- Двигательный режим.
- Холостой ход.
- Генераторный режим.
- Электромагнитное торможение.
Пуск является начальным этапом работы любого двигателя. В этом режиме на обмотку пускается ток и создаются вращающиеся магнитные поля. В момент, когда сила трения меньше электродвижущей — ротор начинает вращение.
Двигательный режим выполняет основную задачу электродвигателя, то есть превращает электродвижущую силу в механическое вращение вала.
Холостой ход происходит, когда на валу отсутствует нагрузка, то есть он не подсоединен к другим устройствам.
Генераторный режим включается, когда обороты вала принудительно, например, с помощью другого двигателя, превышают скорость вращения электромагнитного поля. В этом случае электродвижущая сила имеет обратный вектор и двигатель превращается в источник активной энергии.
Электромагнитное торможение происходит, когда искусственно изменяют направление вращения электромагнитного поля и ротора на противоположные. Происходит довольно быстрое торможение. Применяется только в экстренных случаях, так как выделяется огромное количество тепла.
ПРЕИМУЩЕСТВА ТРЕХФАЗНОГО АСИНХРОННОГО ДВиГАТЕЛЯ
Трёхфазный двигатель также может работать в однофазном режиме, когда это потребуется. Однако номинальная мощность при этом понижается приблизительно вдвое.
В случае пропадания одной из фаз двигатель продолжит работу и даже будет возможен запуск, но с пониженной мощностью. Относительная дешевизна, хороший КПД и надежность поспособствовали тому, что такие моторы заслужили наибольшую популярность во всем мире.
На нашем сайте вы сможете найти электродвигали для любых ситуаций. В каталогах представлены моторы таких мировых лидеров как Siemens, ABB, Lenze, а также VEM motors.
На страницах нашего блога также можно также ознакомиться с другими типами асинхронных моторов >>>ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ >> ВИДЫ ЭЛЕКТРОДВИГАТЕЛЕЙ
Алгоритм работы асинхронного двигателя
Асинхронный двигатель изобретен в 1889 г. выдающимся русским электротехником М. О. Доливо-Добровольским. Благодаря простоте конструкции и эксплуатации асинхронный двигатель стал основой современного электропривода.
В основу принципа действия асинхронных двигателей положено явление Араго, демонстрируемое следующим образом. Под горизонтально подвешенным на нити медным или алюминиевым диском помещают вращающийся подковообразный магнит, при этом диск приходит во вращение в ту же сторону, что и магнит. Тот же диск будет вращаться и в случае, если его расположить во вращающемся магнитном поле, создаваемом, например, тремя катушками, включенными в трехфазную сеть.
Вращение диска в описанных опытах объясняется так. Вращающееся магнитное поле, создаваемое механическим вращением постоянного магнита или токами трехфазной системы в катушках, индуцирует в теле диска вихревые токи. Последние взаимодействуют с вращающимся магнитным полем и в соответствии с законом Ленца начинают приводить диск во вращение. По мере увеличения скорости диска относительная скорость диска и поля уменьшается, уменьшаются индукционные токи в диске и электромагнитные силы. За счет механического трения диск начнет приостанавливаться, однако возрастающая при этом относительная скорость диска и поля приводит к увеличению индукционных токов и электромагнитных сил, и диск станет снова «подталкиваться» и т. д. В конечном счете наступит равновесие между электромагнитным и тормозным моментами, при котором диск будет вращаться с некоторой постоянной скоростью, меньшей скорости вращения магнитного поля, т. е. асинхронно.
Явление асинхронного вращения диска из немагнитного металла во вращающемся магнитном поле положено в основу устройства асинхронных двигателей.
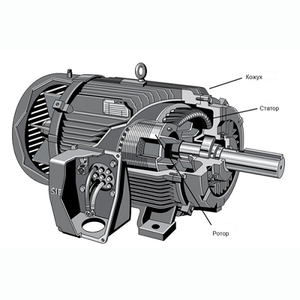
Основными частями асинхронного двигателя являются (рис. 5-1): статор 1 с рабочей обмоткой, ротор 2 с лопастями вентилятора 3 и два подшипниковых щита 4 с вентиляционными отверстиями.
Сердечник статора собирают из листов электротехнической стали. В специальных пазах, расположенных на внутренней цилиндрической поверхности статора, укладывают рабочие обмотки двигателя. Для включения обмоток звездой и треугольником у обмоток выведены все шесть концов. Ротор асинхронного двигателя представляет собой стальной цилиндрический сердечник, собранный из листов электротехнической стали, с обмоткой в виде «|беличьего колеса», которое можно рассматривать как многофазную обмотку (рис. 5-2) Здесь каждая пара диаметрально противоположных стержней с соединительными кольцами представляет собой короткозамкнутый виток.


Вращение ротора можно объяснить следующим образом. Если «беличье колесо», способное вращаться вокруг оси, поместить во вращающееся магнитное поле, то под действием ЭДС, возникающих в стержнях, в короткозамкнутых витках появятся токи. Эти токи, взаимодействуя с вращающимся магнитным полем статора, приведут «беличье колесо» в асинхронное вращение в ту же сторону, что и поле. Получается асинхронный двигатель с короткозамкнутым ротором, так как стержни «беличьего колеса», выполняющие роль рабочей обмотки ротора, замкнуты накоротко через соединительные кольца. Однако из-за большого рассеяния магнитного потока внутри статора (в воздухе) действующее на ротор усилие со стороны вращающегося поля было бы невелико, поэтому «беличье колесо» располагают на поверхности стального цилиндра. Последний собирают из отдельных листов электротехнической стали.

