
Бесколлекторный двигатель
бесколлекторный двигатель
Двигатели используются во многих областях техники. Для того чтобы происходило вращение ротора двигателя необходимо наличие вращающегося магнитного поля. В обычных двигателях постоянного тока это вращение осуществляется механическим способом с помощью щеток, скользящих по коллектору. При этом возникает искрение, а, кроме того, из-за трения и износа щеток для таких двигателей необходимо постоянное техническое обслуживание.
Благодаря развитию техники стало возможным генерировать вращающееся магнитное поле электронным способом, что было воплощено в бесколлекторных двигателях постоянного тока (БДПТ).
Устройство и принцип действия
Основными элементами БДПТ являются:
- ротор, на котором укреплены постоянные магниты;
- статор, на котором установлены обмотки;
- электронный контроллер.
По конструкции такой двигатель может быть двух типов:
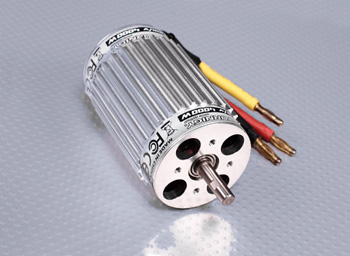
с внутренним расположением ротора (inrunner)

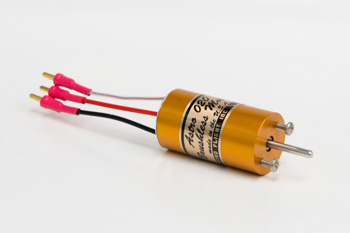
с внешним расположением ротора (outrunner)
В первом случае ротор вращается внутри статора, а во втором – ротор крутится вокруг статора.
Двигатель типа inrunner используется в том случае, когда необходимо получить большие обороты вращения. Этот двигатель имеет более простую стандартную конструкцию, которая позволяет использовать неподвижный статор для крепления двигателя.
Двигатель типа outrunner подходит для получения большого момента при низких оборотах. В этом случае крепление двигателя производится с использованием неподвижной оси.
Двигатель типа inrunner — большие обороты, низкий крутящий момент. Двигатель типа outrunner — маленькие обороты, высокий крутящий момент.
Число полюсов в БДПТ может быть разным. По числу полюсов можно судить о некоторых характеристиках двигателя. Например, двигатель с ротором, имеющим 2 полюса, имеет большее число оборотов и малый момент. Двигатели с увеличенным количеством полюсов имеют больший момент, но меньшее число оборотов. Изменением числа полюсов ротора можно менять число оборотов двигателя. Таким образом, изменяя конструкцию двигателя, производитель может подобрать необходимые параметры двигателя по моменту и числу оборотов.
Управление БДПТ

Регулятор оборотов, внешний вид
Для управления бесколлекторным двигателем используется специальный контролер — регулятор скорости вращения вала двигателя постоянного тока. Его задачей является генерация и подача в нужный момент на нужную обмотку необходимого напряжения. В контроллере для приборов с питанием от сети 220 В чаще всего используется инверторная схема, в которой происходит преобразование тока с частотой 50 Гц сначала в постоянный ток, а затем в сигналы с широтно-импульсной модуляцией (ШИМ). Для подачи питающего напряжения на обмотки статора используются мощные электронные ключи на биполярных транзисторах или других силовых элементах.
Регулировка мощности и числа оборотов двигателя осуществляется изменением скважности импульсов, а, следовательно, и действующим значением напряжения, подаваемого на обмотки статора двигателя.
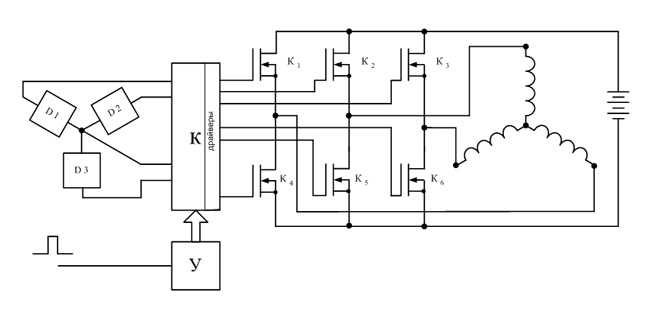
Принципиальная схема регулятора оборотов. К1-К6 — ключи D1-D3 — датчики положения ротора (датчики Холла)
Важным вопросом является своевременное подключение электронных ключей к каждой обмотке. Для обеспечения этого контроллер должен определять положение ротора и его скорость. Для получения такой информации могут быть использованы оптические или магнитные датчики (например, датчики Холла), а также обратные магнитные поля.
Более распространено использование датчиков Холла, которые реагируют на наличие магнитного поля. Датчики размещаются на статоре таким образом, чтобы на них действовало магнитное поле ротора. В некоторых случаях датчики устанавливают в устройствах, которые позволяют изменять положение датчиков и, соответственно, регулировать угол опережения (timing).
Регуляторы оборотов вращения ротора очень чувствительны к силе тока, проходящего через него. Если вы подберете аккумуляторную батарейку с большей выдаваемой силой тока, то регулятор сгорит! Правильно подбирайте сочетания характеристик!
Достоинства и недостатки
По сравнению с обычными двигателями БДПТ имеют следующие достоинства:
- большой кпд;
- высокое быстродействие;
- возможность изменения частоты вращения;
- отсутствие искрящих щеток;
- малые шумы, как в звуковом, так и высокочастотном диапазонах;
- надежность;
- способность противостоять перегрузкам по моменту;
- отличное соотношение габаритов и мощности.
Бесколлекторный двигатель отличается большим кпд. Он может достигать 93-95%.
Высокая надежность механической части БД объясняется тем, что в нем используются шарикоподшипники и отсутствуют щетки. Размагничивание постоянных магнитов происходит довольно медленно, особенно, если они выполнены с использованием редкоземельных элементов. При использовании в контроллере защиты по току срок службы этого узла довольно высок. Фактически срок службы БДПТ может определяться сроком службы шарикоподшипников.
Недостатками БДПТ является сложность системы управления и высокая стоимость.
Применение
Области применения БДТП следующие:
- создание моделей;
- медицина;
- автомобилестроение;
- нефтегазовая промышленность;
- бытовые приборы;
- военная техника.
 Использование БД для авиамоделей дает значительное преимущество по мощности и габаритам. Сравнение обычного коллекторного двигателя типа Speed-400 и БДТП того же класса Astro Flight 020 показывает, что двигатель первого типа имеет кпд 40-60%. Кпд второго двигателя в тех же условиях может достигать 95%. Таким образом, использование БД позволяет увеличить почти в 2 раза мощность силовой части модели или время ее полета.
Использование БД для авиамоделей дает значительное преимущество по мощности и габаритам. Сравнение обычного коллекторного двигателя типа Speed-400 и БДТП того же класса Astro Flight 020 показывает, что двигатель первого типа имеет кпд 40-60%. Кпд второго двигателя в тех же условиях может достигать 95%. Таким образом, использование БД позволяет увеличить почти в 2 раза мощность силовой части модели или время ее полета.
Благодаря малому шуму и отсутствию нагревания при работе БДПТ широко используются в медицине, особенно в стоматологии.
В автомобилях такие двигатели используются в подъемниках стекол, электростеклоочистителях, омывателях фар и электрорегуляторах подъема кресел.
Отсутствие коллектора и искрения щеток позволяет использовать БД в качестве элементов запорных устройств в нефтегазовой промышленности.
В качестве примера использования БД в бытовой технике можно отметить стиральную машину с прямым приводом барабана компании LG. Эта компания использует БДТП типа Outrunner. На роторе двигателя имеется 12 магнитов, а на статоре – 36 катушек индуктивности, которые намотаны проводом диаметром в 1 мм на сердечники из магнитопроводящей стали. Катушки соединены последовательно по 12 штук в фазе. Сопротивление каждой фазы равно 12 Ом. В качестве датчика положения ротора используется датчик Холла. Ротор двигателя крепится к баку стиральной машины.
 Повсеместно данный двигатель используется в жестких дисках для компьютеров, что делает их компактными, в CD и DVD приводах и системах охлаждения для микро-электронотехнических устройств и не только.
Повсеместно данный двигатель используется в жестких дисках для компьютеров, что делает их компактными, в CD и DVD приводах и системах охлаждения для микро-электронотехнических устройств и не только.
Наряду с БД малой и средней мощности в промышленности с тяжелыми условиями работы, судовой и военной промышленностях все больше используются большие БДПТ.
БД большой мощности разработаны для американских ВМС. Например, компания Powertec разработала БДТП мощностью 220 кВт со скоростью в 2000 об/мин. Момент двигателя достигает 1080 Нм.
Кроме указанных областей, БД применяются в проектах станков, прессов, линий для обработки пластмасс, а также в ветроэнергетике и использовании энергии приливных волн.
Характеристики
Основные характеристики двигателя:
- номинальная мощность;
- максимальная мощность;
- максимальный ток;
- максимальное рабочее напряжение;
- максимальные обороты (или коэффициент Kv);
- сопротивление обмоток;
- угол опережения;
- режим работы;
- габаритно-массовые характеристики двигателя.
Основным показателем двигателя является его номинальная мощность, то есть мощность, вырабатываемая двигателем в течение длительного времени его работы.
 Максимальная мощность – это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальная мощность – это мощность, которую может отдать двигатель в течение кратковременного отрезка времени, не разрушаясь. Например, для упомянутого выше бесколлекторного двигателя Astro Flight 020 она равна 250 Вт.
Максимальный ток. Для Astro Flight 020 он равен 25 А.
Максимальное рабочее напряжение – напряжение, которое могут выдержать обмотки двигателя. Для Astro Flight 020 задан диапазон рабочих напряжений от 6 до 12 В.
Максимальное число оборотов двигателя. Иногда в паспорте указывается коэффициент Kv – число оборотов двигателя на один вольт. Для Astro Flight 020 Kv= 2567 об/В. В этом случае максимальное число оборотов можно определить умножением этого коэффициента на максимальное рабочее напряжение.
Обычно сопротивление обмоток для двигателей составляет десятые или тысячные доли Ома. Для Astro Flight 020 R= 0,07 Ом. Это сопротивление влияет на кпд БДПТ.
Угол опережения представляет собой опережение переключения напряжений на обмотках. Оно связано с индуктивным характером сопротивления обмоток.
Режим работы может быть длительным или кратковременным. При долговременном режиме двигатель может работать длительное время. При этом выделяемое им тепло полностью рассеивается и он не перегревается. В таком режиме работают двигатели, например, в вентиляторах, конвейерах или эскалаторах. Кратковременный режим используется для таких устройств, как например, лифт, электробритва. В этих случаях двигатель работает короткое время, а затем долгое время остывает.
В паспорте на двигатель приводятся его размеры и масса. Кроме того, например, для двигателей, предназначенных для авиамоделей, приводятся посадочные размеры и диаметр вала. В частности, для двигателя Astro Flight 020 приведены следующие характеристики:
- длина равна 1,75”;
- диаметр равен 0,98”;
- диаметр вала равен 1/8”;
- вес равен 2,5 унции.
Бесколлекторный двигатель на низких оборотах
Электродвигатели Parker Hannifin представлены двигателями постоянного тока, коллекторныыми двигателями с постоянными магнитами, и двигателями переменного тока, синхронными и асинхронными с короткозамкнутым ротором.
Двигатели GVM являются синхронными серводвигателями переменного тока на постоянных магнитах. Достаточно большая величина крутящего момента, быстродействие и эффективность двигателей Parker Hannifin серии GVM обеспечивают требуемые условия для достижения впечатляющих рабочих характеристик во множестве платформ транспортных средств. Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Одним из знаковых применений двигателей серии GVM является использование в мотоциклах-прототипах фирмы Victory в гонке 2015 года на острове Мэн. Гонка на острове Мэн — самая длинная гонка для электромотоциклов в мире.

Двигатель Parker Hannifin серии GVM выдерживает очень высокие средние скорости порядка 200 км/ч
и обеспечивает длительную беспрерывную работу
в экстремальных температурных условиях.
Питание: 24 — 800 В DC.
Тип: синхронный, с редкоземельными магнитами.
Количество полюсов: 12.
Крутящий момент: до 376 Н·м.
Номинальная мощность: до 170 кВт.
Частота вращения: до 9800 Об/мин.
Обратная связь: резольвер, SinCos энкодер, бессенсорный.
Типоразмер: 142, 210.
Исполнение: IP67, IP6K9K (опц.).
Особенности: Отличное решения для мобильных приложений (электрокары, электромотоциклы и т.д.).
Серия NV — синхронные двигатели с постоянными магнитами разработанные для высокоскоростных приложений. Высокая точность, низкий уровень вибрации и долгий срок службы обеспечивают работу при максимальной скорости вращения до 17000 об/мин. Уровень защиты корпуса: IP64, IP65, IP67 (по запросу).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 11,5 Нм.
Номинальная мощность: 0,7 — 11 кВт.
Частота вращения: 7000 — 17000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 60, 80, 110, 130.
Исполнение: IP64, IP65 (опц.).
Особенности: Подходят для высокоскоростных приложений.
Серия SMB/H/E, MB/H/E, NX.
Серии двигателей SMB/H/E, MB/H/E, NX представляют линейку синхронных двигателей с постоянными или редкоземельными магнитами.
Благодаря инновационной технологии «Salient Pole» (использование неодимового магнита — мощного постоянного магнита, состоящего из сплава редкоземельного элемента неодима, бора и железа) двигатели серии SMB/H/E, MB/H/E достигают высоких ускорений и выдерживают большие перегрузки без риска размагничивания или отрыва магнита. Совместимы со следующими сериями приводов: SLVD-N, TPD-M, HiDrive, ViX, TWIN-N/SPD-N.
Двигатели серии NX — компактные, с низкой пульсацией момента и плавным ходом, являются эффективной альтернативой традиционным индукционным двигателям. Бессенсорная версия двигателя была разработана в качестве альтернативного решения для минимизации затрат в сочетании с приводом Parker Hannifin AC650S.
Питание: 230, 400 — 480 В AC.
Тип: синхронный, с постоянными / редкоземельными магнитами.
Количество полюсов: 4 — 10.
Крутящий момент: 0,35 — 269 Нм.
Номинальная мощность: 0,2 — 67 кВт.
Частота вращения: 0 — 10000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), инк. энкодер.
Типоразмер: 40, 42, 56, 60, 70, 82, 92, 100, 105, 115, 120, 142, 145, 155,170, 205, 265.
Исполнение: IP44, IP64, IP65, IP67.
Особенности: Компактные с низкой пульсацией момента и плавным ходом.
Серия NK — встраиваемые компактные бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений, обеспечивают работу при максимальной скорости вращения до 15000 об/мин.
Питание: 230, 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 90 Нм.
Номинальная мощность: 0,2 — 34 кВт.
Частота вращения: 1000 — 15000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 42, 56, 62, 80, 110, 143.
Особенности: Встраиваемые, компактные, для высокоскоростных приложений.
Серии синхронных двигателей с постоянными магнитами TM/TK обладают высокой прочностью и обеспечивают работу в жестких условиях. Высокий крутящий момент на малых оборотах предоставляет пользователю решение для следующих приложений: прессы, миксеры, намоточные машины, экструдеры. Серия TM имеет бескорпусное исполнение.
Питание: 400 — 480 В AC.
Тип: синхронный, с постоянными магнитами / +бескорпусной.
Количество полюсов: 24 — 120.
Крутящий момент: 90 — 22100 Нм.
Номинальная мощность: 6,9 — 394 кВт.
Частота вращения: 29 — 2500 Об/мин.
Обратная связь: Endat энкодер, бессенсорный, резольвер (опц.).
Типоразмер, мм: 398, 600, 830 / 230, 385, 565, 795.
Исполнение: IP54 / IP00.
Особенности: Высокий крутящий момент на малых оборотах, для прессов, миксеров, намоточных машин, экструдеров.
Серия HKW/SKW — бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений мощностью до 230 кВт. Электродвигатели используются в приложениях, где высокий крутящий момент на низкой скорости и высокая скорость при постоянной мощности являются критичными характеристиками.
Питание: 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 4 — 16.
Крутящий момент: 3,5 — 1250 Нм.
Номинальная мощность: 2,0 — 230 кВт.
Частота вращения: 260 — 23200 Об/мин.
Обратная связь: бессенсорный, резольвер (опц.).
Типоразмер: 73, 82, 85, 91, 96, 108, 155.5, 195, 242, 310.
Особенности: Встраиваемые, решения для высокоскоростных приложений.
Синхронный двигатель MGV на постоянных магнитах обеспечивает работу при максимальной скорости вращения до 45000 об/мин, используется во многих компонентах автомобильных или авиационных испытательных установок.
Питание: 400 — 480 В AC.
Тип: синхронный, на постоянных магнитах.
Количество полюсов: 4 — 16.
Крутящий момент: 6,8 — 1500 Нм.
Номинальная мощность: 15 — 500 кВт.
Частота вращения: 5000 — 45000 Об/мин.
Обратная связь: резольвер.
Типоразмер: 430, 635, 840, 860, 950, 966, A50, B40, B50.
Особенности: Для высокоскоростных приложений тестовых стендов.
Синхронные электродвигатели EX/EY с постоянными магнитами обеспечивают работу в Зоне 2 при окружающей температуре от 40 ºC до 60 º. Оборудование соответствует стандартам ATEX, IECEx (Зона 1, 2).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 1,75 — 41 Нм.
Номинальная мощность: до 6,3 кВт.
Частота вращения: 0 — 7600 Об/мин.
Обратная связь: резольвер, энкодер (опц.) (EnDat, Hiperface), бессенсорный.
Типоразмер:, 70, 92, 120, 121, 155.
Исполнение: IP64, IP65.
Особенности: ATEX, IECEx (зона 1, 2).
Асинхронные двигатели. Серия MS/MR.
Асинхронные двигатели серии MR подходят для использования со всеми сериями приводов Parker Hannifin переменного тока. Благодаря прочной жесткой конструкции и своим рабочим характеристикам, двигатели серии MR используются в жестких условиях.
Серия MS асинхронных двигателей Parker Hannifin была специально разработана для высокодинамичных приложений и использования с приводами переменного тока Parker Hannifin, имеющими векторное управление по замкнутому контуру, а именно: AC890, AC690+. Двигатели позволяют выполнять операции на постоянной мощности при максимальной скорости вращения до 8000 об/мин. Размеры корпуса идентичны корпусу двигателя постоянного тока с аналогичной мощностью. Уровень защиты корпуса: IP23, IP54, IP55 (опционально).
Питание: 400-460 В AC.
Количество полюсов: 2 — 6.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальная мощность: 0,09 — 524 кВт.
Частота вращения: 0 — 8000 Об/мин.
Обратная связь: энкодер, резольвер (опц.).
Типоразмер: MS100, MS133, MS166, MS180, MS225, MS280; 56 — 200, 180 — 355.
Исполнение: IP23, IP54, IP55.
Особенности: Решение для широкого ряда приложений.
Коллекторные двигатели. Серия RS, RX / AXEM.
Сервомоторы серии RS — малоинерционные двигатели с магнитом из редкоземельных металлов.
Серия RX представляет собой высокоинерционные двигатели с ферритовым магнитом, которые демонстрируют высокие характеристики при работе на холостом ходу. Двигатель RX является экономически эффективным решением для различных серво-приложений. Серия RX также обеспечивает работу маломощных систем в Чистых помещениях.
Сервомоторы RS/RX постоянного тока в сочетании с приводами серии RTS полностью подходят для применений, где требуется компактное решение или высокий динамический уровень.
Двигатели серии AXEM являются одними из самых распространенных серводвигателей во всем мире — парк установленного оборудования насчитывает более 2 000 000 единиц. Сервомотор обеспечивает высокую динамику и управление на низкой скорости, а также работу без шума и вибраций. Надежное и эффективное решение с низкими эксплуатационными расходами.
Питание: 14 — 178 В DC.
Тип: коллекторный с редкоземельными магнитами / с плоским ротором.
Количество полюсов: 4 / нет.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальный ток: 1,5 — 28 А.
Частота вращения: 2000 — 4800 Об/мин.
Обратная связь: тахогенератор, энкодер, резольвер.
Типоразмер: 39, 52, 58, 68, 83, 84, 97, 100, 110, 120, 140, 160, 211, 278.
Исполнение: IP20, IP40, IP54.
Особенности: Отличное управление на низкой скорости вращения, компактность, для медицинских приложений.
Видеоролик ВСП: Электромеханика Parker Hannifin.
Бесколлекторный двигатель на низких оборотах
Библиографическая ссылка на статью:
Абдуллаев М., Ахмадалиев У., Маткасимов М. Применение энергоэффективных и энергоэкономных электроприводов // Современные научные исследования и инновации. 2020. № 6 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2020/06/92666 (дата обращения: 26.08.2021).
Значительную долю в использовании электрической энергии в мире имеют двигатели, применяемые в промышленности. Эти значения настолько велики, что их уменьшением заинтересованы не только предприятия использующие двигатели, несущие основную долю издержек, но также и правительства многих стран. Во многих странах издаются соответствующие документы, накладывающие на производителей электрических устройств обязанность применения энергоэффективных и энергоэкономных приводов.[1]
Экономия электрической энергии во многих установках, усиливается экономией, полученной благодаря применению высокоэффективных бесколлекторных двигателей ЕС. Малогабаритный бесколлекторный двигатель постоянного тока работает на принципе электронной связи и практически не нуждается в техническом обслуживании. Этот двигатель обладает высокой мощностью и низким уровнем шума, он идеально подходит для систем безопасности и медицинского оборудования.
Бесколлекторные двигатели ЕС находят широкое применения в промышленной механической трансмиссии, энергосберегающем оборудовании и оборудовании для защиты окружающей среды, машинах и оборудованиях с автономным источником питания в виде аккумуляторной батареи низкого напряжения.
Бесколлекторные двигатели производятся на номинальные мощности от 60 до 2200 Вт, напряжением 12 В, 24 В, 36 В, 48 В постоянного тока и 110 В, 220 В переменного тока. Двигатели рассчитаны на номинальные скорости 500, 750, 1000, 1500 и 3000 об/мин, уровень шума 40-60 ДБ, нагрев до 60 о С, защитная обработка корпуса. [2]
Бесколлекторные двигатели обладают рядом преимуществ по сравнения с традиционными сериями:
- Бесколлекторный двигатель постоянного тока заменяет традиционную комбинацию электродвигателя переменного тока с щёточно – коллекторным узлом с регулятором и асинхронного двигателя с преобразователем частоты;
- При стабильной работе на малой скорости и высоким крутящим моментом, процесс непосредственной передачи с коробки передач не происходит;
- Бесколлекторный двигатель постоянного тока отличается высоким стартовым крутящим моментом, стабильной работой на малых оборотах и малым пусковым током;
- Бесступенчатое регулирование скорости обеспечивает отличную перегрузочную способность, небольшой объём и высокую плотность мощности;
- Запуск и остановка двигателя сопровождаются прекрасными тормозными характеристиками;
- Без угольной щётки распределителя и токосъёмного контактного кольца, двигатель может экономить энергию и работать более эффективно;
- При работе двигателя сохраняется стабильный крутящий момент в диапазоне номинальной скорости.
Бесколлекторные двигатели ЕС – это электронно-коммутируемые двигатели постоянного тока, в которых обмотки находятся на статоре, а постоянные магниты на роторе. Основным достоинств этих двигателей является более высокая долговечность и надёжность из-за отсутствия щёток, которые являются наиболее распространённой причиной отказа двигателя по причине износа щёток. Единственной изнашиваемой частью этих двигателей является подшипник. Отсутствие щёток также обеспечивает более тихую работу двигателя и более высокую эффективность использования электроэнергии. [3]
Энергосберегающие двигатели ЕС в качестве стандартного решения нашли широкое применение в тепловентиляторах VOLCANO и воздушных завесах WING. Сердцем любого приспособления для нагнетания воздуха является вентиляторный узел или ротор, приводимый в движение с помощью двигателя. Именно он определяет основные параметры устройства. Для обеспечения максимизации производительности в тепловентиляторах VOLCANO производители оптимизировали форму осевого рабочего колеса и радиального рабочего колеса в воздушных завесах WING. Экономия энергии, полученная на вентиляторе, была усилена экономией, полученной благодаря применению высокоэффективных двигателей ЕС.
По сравнению с вентиляторами оснащёнными АС двигателями применение ЕС двигателей обеспечивает:
- Снижение энергопотребления
- Высокую эффективность во всём диапазоне регулирования
- Незначительные затраты на эксплуатацию
- Тихую работу даже при значительной скорости вращения вала двигателя
- Плавное регулирование расхода воздуха
- Меньший размер двигателя при аналогичной мощности.
Двигатели ЕС в состоянии обеспечить на 40% ниже затраты на эксплуатацию по сравнению с двигателями предыдущих серий.
Магнитный редуктор для бесколлекторного мотора

В данной статье я расскажу о магнитном редукторе, разработанном нами. Данный редуктор планируется использовать в связке с бесколлекторным мотором. В статье будет рассказано о возможной области применения данного редуктора, о его плюсах и минусах по сравнению с обычными редукторами.
Введение
Бесколлекторные электродвигатели (BLDC) обладают крайне высокой мощностью при минимальном размере. Это достигается благодаря мощным редкоземельным магнитам. При создании мотора в маленьком форм-факторе, такие двигатели не имеют конкуренции.
Однако, несмотря на высокую мощность, небольшой размер мотора накладывает на него множество ограничений таких как: небольшой момент, высокие рабочие обороты, маленькая площадь охлаждения. Данные ограничения не позволяют использовать весь потенциал мотора. Так, например, мотор форм-фактора 540 (D=36мм L=54мм) способен выдавать мощность свыше киловатта с достаточно хорошим КПД, но это возможно только при очень высоких оборотах, когда эту мощность снять с мотора становится достаточно сложно. В номинальном режиме такой мотор без принудительного обдува может выдавать 200-400ватт.
Основным направлением нашего коллектива MotoChrome является проектирование и создание бесколлекторных моторов. При проектировании мотора для одного из заказчиков мы как раз столкнулись с проблемами описанными выше. Заказчику был нужен мотор небольшим диаметром, но при этом достаточно высоким моментом и КПД. Чтобы соблюсти требования мотор получился длиной почти полметра при диаметре в 40мм. Мотор получился достаточно дорогим и очень сложным в сборке. При этом, для достижения тех же мощностных параметров, можно сделать мотор в 3 раза меньше, но с использованием редуктора. И в итоге выбран был именно этот вариант.


Использование редуктора кажется хорошим решением. Но с ним возникает множество других проблем, что не позволяет применять их полноценно во всех моторах.
- дополнительный узел, имеющий вероятность поломки, и ограниченный ресурс работы
- увеличение габаритных размеров;
- повышенная шумность, что может быть критичным в работе подводных устройств;
- большинство механических редукторов имеют ограничения по передаваемому крутящему моменту и скорости вала на входном валу редуктора, что в свою очередь накладывает дополнительные ограничения/требования к электромотору.
Подбирая редуктор мы упёрлись в две основные проблемы. 1) Чтобы редуктор смог реализовать весь потенциал бесколлекторного мотора, он должен быть размером сравнимым с размером мотора. С ним мотор перестаёт быть компактным. 2) Большинство механических редукторов не способны работать на высоких оборота (>15000 RPM), а нам интересны именно высокие обороты. Только 1…2 компании согласились взять заказ на требуемый редуктор и поставить его через 3 месяца после получения оплаты. Какова будет его надежность и стойкость нам еще предстоит выяснить, однако трудности, связанные с поиском нужного редуктора, заставили нас думать над этой проблемой дальше.
Неплохим вариантом, с нашей точки зрения, оказался магнитный редуктор. Они пока не получили широкого применения и про них достаточно мало информации, поэтому мы решили поглубже разобраться в данном вопросе и сделать редуктор самостоятельно. Это нам позволит отработать подход к его моделированию и позволит в будущем рассчитывать его параметры.
Магнитный редуктор
Магнитный редуктор мы решили делать по распространённой схеме, которая представляет собой аналог планетарного редуктора. Магниты в центре являются «солнечной шестерней», магниты снаружи — «зубчатый венец (эпицикл)», между ними зубцы из магнитомягкого материала выполняют роль «водила».
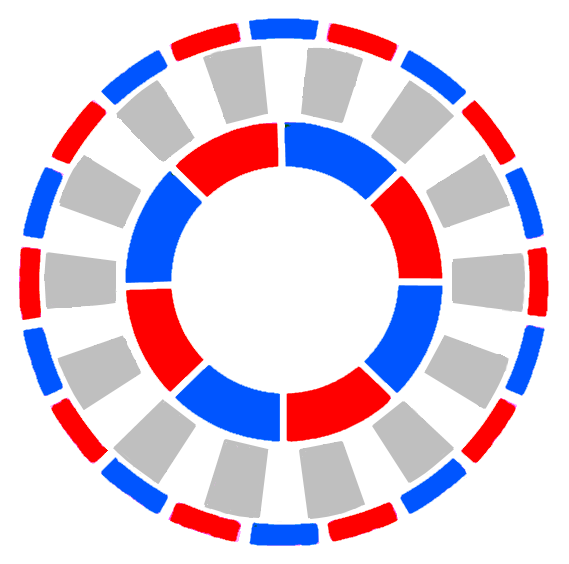
Такая конструкция обладает максимальным моментом удержания в минимальном объёме и она хорошо подходит под нашу задачу. В результате нами был спроектирован и изготовлен следующий образец.
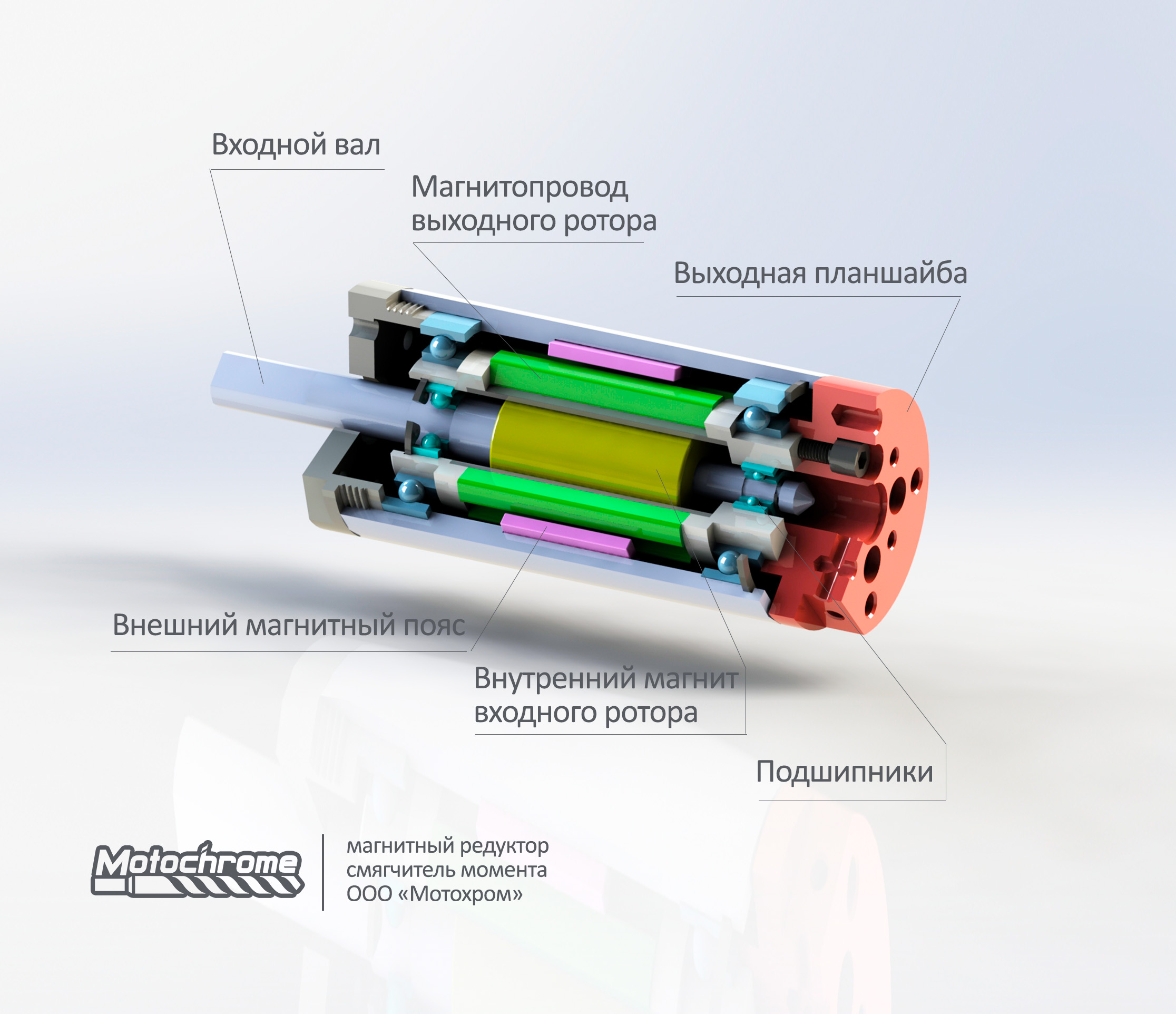
Диаметр данного образца 36мм. Входная часть редуктора выполнена по стандарту NEMA 17. Вместо выходного вала мы сделали универсальную планшайбу, позволяющую прикреплять к ней различную нагрузку в опытных работах, тестах и экспериментах, а при необходимости и установить вал, благодаря базовому посадочному отверстию в центре планшайбы. К слову сказать, концепцию универсальных креплений мы применили и в нашем моторе «Electron», который мы готовим к серийному производству и продажи на территории РФ (о нем мы напишем отдельную статью).
Параметры получившегося редуктора оказались достаточно близки к расчётным. Он обладает понижением 1:10 и способен удержать на выходном валу момент 0.53Нм при статической нагрузке. Это достаточно хороший показатель для таких габаритов. Для сравнения, мотор в тех же габаритах выдаст такой момент с КПД ниже 50%, а система с данным редуктором будет обладать КПД 80%.
Кроме того, редуктор получился очень плавным и тихим. В нём абсолютно не ощущаются какие-либо рывки при вращении, момент передаётся очень мягко. Данное свойство определило название, данное нами редуктору — «Smoother».

