
Биполярный шаговый двигатель типоразмер 42 мм
Биполярный шаговый двигатель типоразмер 42 мм

Шаговый двигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками электрический двигатель, в котором подача электрического тока на одну из обмоток приводит к тому, что его ротор фиксируется в строго определённом положении. Последовательное подключение обмоток приводит к вращательному движению на заданный угол. Благодаря этому, угол поворота ротора зависит от количества последовательных переключений обмоток, а скорость вращения ротора равна частоте переключения обмоток умноженной на угол поворота ротора за одно переключение.
Наибольшее распространение получили двухфазные(биполярные) шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Производитель гарантирует точность шага без нагрузки до 5 % от величины шага. Шаговые двигатели, в зависимости от конструкции и режима управления могут выполненять от доли оборота в секунду до нескольких тысяч оборотов в секунду.
Преимущества и недостатки шагового двигателя:
Преимущества:
- Главное преимущество шаговых приводов — точность. При подаче тока в обмотки шаговый двигатель повернется строго на определенный угол. Ошибка позиционирования в пределах 3 — 5% шага и эта ошибка не накапливается от шага к шагу.
- Зависимость оборотов двигателя от дискретных импульсов позволяет управлять двигателем без обратной связи.
- Стоимость шаговых приводов, в среднем в 1,5-2 раза дешевле сервоприводов. Шаговый привод, как недорогая альтернатива сервоприводу, наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Недостатки:
- Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения. Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ.
- Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага.
Основные характеристики:
- Погрешность шага — 5% (полный шаг, без нагрузки)
- Погрешность сопротивления ±10%
- Погрешность индуктивности ±20%
- Максимальная температура 80º С max (номинальный ток, 2 фазы)
- Рабочий диапазон температур от -20º С до +50ºС
- Сопротивление изоляции 100МΩ Min., 500VDC
- Диэлектрическая стойкость 500VAC в одну минуту
- Радиальное биение вала 0,02 мм (при нагрузке 450 г)
- Осевое биение вала 0,08 мм (при нагрузке 450 г)
| Модель | Шаг (угол поворота) | Ном. напряжение, V | Ток/ фаза, А | Сопротивление/ фаза, Ω | Индуктивность/ фаза, mH | Момент удержания, кг.см | Кол-во выходов | Масса, кг | Цена за шт. с НДС, грн* |
|---|---|---|---|---|---|---|---|---|---|
| SM42HT38-1684A | 1,8 ° | 2,8 | 1,68 | 1,65 | 3,2 | 3,6 | 4 | 0,28 | 568.81 |
| 42BHH48W-200-24 | 1,8 ° | 3,0 | 2,0 | 1,5 | 3,0 | 4,3 | 4 | 0,24 | |
| 42J1848–408 | 1,8° | – | 0,8 | 7,5 | 10 | 4 | 4 | 0,21 | 664.30 |
* — указанные цены не являются публичной офертой, носят исключительно информационный характер и могут отличаться от действительных цен.
Униполярный и биполярный шаговый двигатель

Биполярный и униполярный шаговый двигатель
В чем принципиальные различия между биполярным и униполярным шаговым двигателем, какой стоит выбрать?

В данной статье будут рассмотрены два типа двухфазных шаговых двигателя — униполярный и биполярный. Подобные названия появились благодаря тому, что в двухфазных шаговых двигателях встречаются два основных типа обмотки катушек, один — биполярный, другой — униполярный. Далее — рассмотрим оба типа подробнее, чтобы разобраться какой из них является более эффективным.
Униполярный шаговый двигатель
Униполярные шаговые двигатели, так же как и биполярные, имеют две обмотки, и каждая из них имеет центральный отвод. В зависимости от требуемого направления магнитного поля, в работу включается соответствующая половина обмотки, что достигается простым переключением ключей и существенно упрощает схему драйвера. Подобный механизм позволяет в качестве управляющей системы использовать простейший униполярный драйвер с четырьмя ключами.
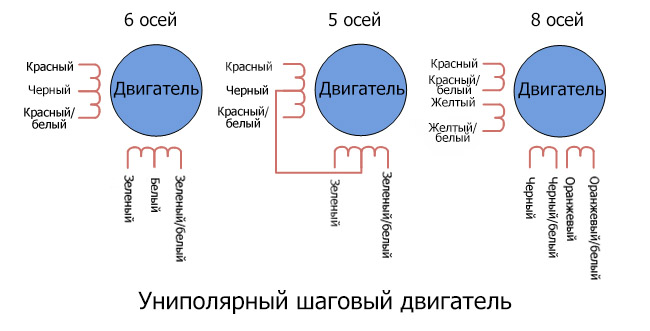
Униполярный двухфазный шаговый двигатель имеет шесть выводов. Но так же бывает, что средние отводы катушек внутри соединены, что позволяет шаговому двигателю иметь только пять выводов. Благодаря простоте в эксплуатации, данные двигатели имеют широкую популярность среди как новичков любителей, так и во многих промышленных отраслях, поскольку униполярный шаговый двигатель является самым примитивным и дешевым способом получить высокоточные угловые движения.
Биполярные шаговые двигатели
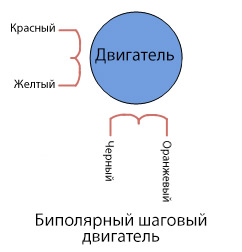 С биполярными шаговыми двигателями дело обстоит немного иначе. Данные двигатели имеют только одну обмотку в одной фазе. Управляющая схема биполярного двигателя должна быть намного сложнее, чтобы менять направление магнитного поля с целью изменить направление тока в обмотке. Этого можно достигнуть с помощью схемы H-bridge. К тому же, для упрощения задачи можно приобрести несколько драйверных чипов, которые вам помогут. Биполярные шаговые двигатели, в отличие от униполярных имеют два вывода на одну фазу, ни один из которых не является общим. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
С биполярными шаговыми двигателями дело обстоит немного иначе. Данные двигатели имеют только одну обмотку в одной фазе. Управляющая схема биполярного двигателя должна быть намного сложнее, чтобы менять направление магнитного поля с целью изменить направление тока в обмотке. Этого можно достигнуть с помощью схемы H-bridge. К тому же, для упрощения задачи можно приобрести несколько драйверных чипов, которые вам помогут. Биполярные шаговые двигатели, в отличие от униполярных имеют два вывода на одну фазу, ни один из которых не является общим. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
Униполярные шаговые двигатели, в отличие от биполярных, имеют два вывода за фазу, ни одна из которых не является общей. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
Выводы
Биполярные шаговые двигатели немного сложнее в управлении, но при схожих габаритах, биполярный двигатель способен обеспечить больший момент, в сравнении с униполярным. Однако униполярный двигатель, в противовес биполярному, проще в эксплуатации, и вполне сгодится для привода устройств с небольшой мощностью — бытовая техника (стиральная машина, холодильник), магнитофоны и т.д.
Биполярный шаговый двигатель что это
Комплексные поставки комплектующих для ЧПУ и автоматизации
Расчёт проекта
Консультация
Устройство шагового двигателя и его управление
Устройство шагового двигателя и управление им
Шаговый двигатель (ШД)- это бесколлекторный синхронный электромотор, оснащённый несколькими обмотками. Подача напряжения на одну из обмоток статора вызывает остановку ротора. При последовательной активации обмоток ротор начинает дискретно поворачиваться. То есть, ротор совершает отдельные угловые перемещения – шаги. Отсюда и название этого типа электродвигателей.
Управление шаговым двигателем гораздо более сложное, нежели стандартным коллекторным аналогом. Сложность определяется необходимостью переключения в строгой последовательности напряжения в обмотках. При этом нужно ещё контролировать и силу тока. Обычно ШД управляются с помощью устройств, называемых драйверами.
Типы шаговых двигателей
Конфигурация обмоток определяет деление ШД на биполярные и униполярные.
У биполярного двигателя одна обмотка на каждую фазу. Всего их в биполярном двигателе две. Выводов, соответственно, четыре. Для изменения направления силовых линий магнитного поля драйвер переполюсовывает обмотку.
Типы шаговых двигателей
Конфигурация обмоток определяет деление ШД на биполярные и униполярные.
У биполярного двигателя одна обмотка на каждую фазу. Всего их в биполярном двигателе две. Выводов, соответственно, четыре. Для изменения направления силовых линий магнитного поля драйвер переполюсовывает обмотку.


Аналогично описанному устройству на каждую фазу униполярного двигателя также приходится одна обмотка. Отличием является отвод из середины обмотки. Это решение позволяет изменять направление силовых линий магнитного поля, просто переключая части обмотки. Выводы из срединной части обмоток иногда объединяются внутри корпуса мотора, поэтому выводов может насчитываться и пять, и шесть.
В ряде случаев униполярные двигатели оснащаются четырьмя раздельными обмотками. Из-за этого неопытные пользователи часто неправильно называют эти моторы 4-х фазными. От каждой обмотки идут свои выводы, и поэтому общее их количество равняется восьми. Такой ШД при соответствующей схеме соединения обмоток может стать как биполярным, так и униполярным. Нижеприведённые иллюстрации наглядно демонстрируют этот момент. На рис. а) изображена схема биполярного ШД, на рис. б) – схема униполярного, на рис. в) четырёхобмоточного.
Эксплуатационные свойства ШД
Шаговые двигатели как компоненты, используемые в автоматизации станков, обладают рядом важных эксплуатационных свойств, к которым относятся следующие.
1. Дискретность перемещений.
Это главное свойство, определяющее все остальные параметры шагового двигателя. Львиная доля шаговых двигателей выполняет 200 или 400 шагов за один оборот ротора. Однако благодаря возможности промежуточной фиксации ротора можно добиваться увеличенного количества шагов до 800 и более. В сверхточных моделях число дискретных перемещений может достигать 10 тысяч шагов за оборот.
2. Ограничения в точности установки ротора.
Погрешность установки ротора в большинстве выпускаемых сегодня ШД составляет 5% от размера шага. Таким образом, при шаге в 1.8° неточность установки будет равняться примерно 5.4´. На практике, при дроблении шага, например, 1 к 10, шаг будет равен погрешности установки, причём, увеличение количества делений не приведёт к повышению точности перемещения. Единственное, в чём это может оказаться эффективным, – в обеспечении плавности перемещения ротора.
3. Соотношение крутящего момента и скорости вращения ротора.
С большой степенью приближения можно говорить о том, что значение произведения момента и скорости вращения вала шагового двигателя является постоянным. При возрастании скорости вращения ротора величина крутящего момента уменьшается пропорционально.
Достоинства шаговых электродвигателей
В число основных достоинств, определяющих широкое применение этого типа электрических двигателей, входят следующие.
1. Зависимость угла поворота ротора от количества импульсов, поданных на обмотку двигателя.
2. Обеспечение полного момента при остановке двигателя (при подаче питания на обмотки).
3. Повторяемость. Точность шаговых двигателей составляет от 3 до 5% величины шага, причём, ошибка от шага к шагу не накапливается.
4. Быстрый старт, мгновенная остановка, минимальное время переключения на реверс.
5. Надёжность, обусловленная отсутствием щёток. В общем случае длительность срока исправной службы двигателя зависит только от надёжности подшипников.
6. Жёсткая зависимость положения ротора от входного сигнала позволяет позиционировать ротор, не прибегая к использованию обратной связи.
7. Возможность вращения полезной нагрузки, присоединенной напрямую к валу электромотора без редуктора, с предельно малой скоростью.
8. Широкий интервал скоростей.
9. Более доступная цена в сравнении с сервоприводами.
Недостатки шаговых электродвигателей
Однако при всех положительных моментах существует и ряд недостатков, присущих шаговым электрическим моторам. Их краткий перечень:
- возникновение резонансных явлений при функционировании;
- вероятность пропуска шагов, что из-за отсутствия обратной связи приводит к невозможности контроля положения ротора;
- снижение момента и потеря стабильности при высокой скорости;
- малое значение удельной мощности.
Организация управления шаговым двигателем
Наиболее простым вариантом является следующий.
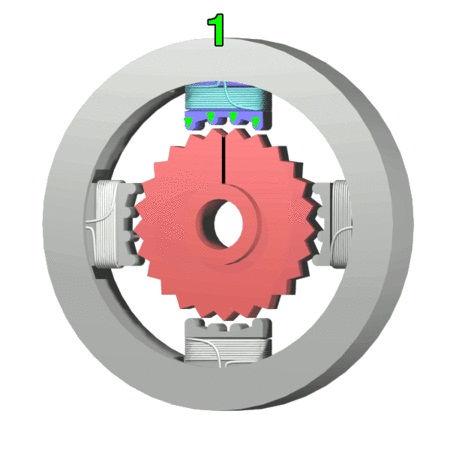
В составе двигателя 4 электромагнитные катушки A, B, C и D. Если подавать на них напряжение, то они превращаются в магниты. При этом катушки А и В активны при протекании тока в прямом направлении, а C и D — в обратном. Предположим, что полезной нагрузкой для данного двигателя является зубчатое колесо, зубчики которого притягиваются к катушкам при подаче на них напряжения.
Таким образом, при последовательном включении тока в катушках колесо начнёт вращаться. Для обеспечения плавности движения в общем случае можно увеличить либо число зубчиков, либо количество катушек. Принцип управления мотором при этом останется неизменным. Изменяться будут лишь усилие и угол поворота за один цикл включения-отключения питания. В обычных условиях применяется такая конфигурация, когда располагают по четыре катушки вдоль траектории вращения, и на каждую группу катушек приходится по зубчику. Система выглядит как шестерня, окружённая катушками.
Для простоты понимания принципа управления рассмотрим упрощённую модель – 4 катушки и 1 зубчик (стрелка на колесе). Предположим, что перед включением двигателя зубчик находился возле катушки D.
1. Самое очевидное решение для запуска вращения – подать питание на катушку А. Колесо провернётся, и стрелка замрёт возле этой катушки. Отключаем А и подаём питание на В. Стрелка движется к В и встаёт рядом с этой катушкой. Отключаем В, и подключаем C. Стрелка останавливается около неё. Отключаем C, включаем D – стрелка останавливается на D. Отключаем D, включаем A, и процесс повторяется.
За каждый цикл включения-отключения питания колесо поворачивается на угол в 90°. Следовательно, на полный круг потребуется четыре цикла, что обуславливает довольно высокую угловую скорость. Если масса колеса будет высокой, то скоростной поворот вызовет возникновение значительной инерции. Инерционное ускорение может снизить точность поворота колеса, так как разогнавшееся колесо не сможет остановиться мгновенно. Всё это может привести к потере контроля вращения, а при самом неблагоприятном сценарии к отрыву колеса и разрушению системы.
Достоинством данного принципа управления является сравнительная простота реализации.
2. Не таким очевидным, но достаточно эффективным является следующее решение. Подаём питание на катушки А и D. Колесо проворачивается, и стрелка фиксируется между А и D. Отключаем D, подключаем В. Стрелка замирает между катушками А и В. Отключаем А, подключаем C. Стрелка встаёт между В и C. Отключаем В, подключаем D. Стрелка между C и D. Отключаем C, подключаем А. Стрелка фиксируется между D и А. Далее процесс повторяется. За один цикл включения-отключения те же 90°, полный круг за те же четыре цикла. Кажется, что всё то же самое? Однако отличием является увеличенный крутящий момент, поскольку «в силе» оказывается одновременно две катушки. Следовательно, пороговое значение скорости, при которой инерция становится неуправляемой, повышается, что выгодно отличает этот принцип от первого.
3. Дробление шага. Допустим, что реализована схема не только включения и отключения катушек, а и подачи на них промежуточных значений напряжения питания – 0, 25, 50, 75, 100%. При этом схема подаёт питание в такой последовательности (для пары A и C):
C100%, А 0% – C 75%, А 25% – C 50%, А 50% – C 25%, А 75% – C 0% и А 100%.
По тому же правилу напряжение питания подаётся на пары катушек А-В, В-D, D-Cи C-В.
Дробление шага позволяет снизить уровень шума и избавиться от дребезжания. Кроме того, обеспечивается плавность движения. Инерция пренебрежимо мала, и управление не теряется. Недостатком является сложность реализации.
4. Подача напряжения аналоговым способом. Концептуально принцип напоминает дробление шага на бесконечное количество положений. Напряжение, подаваемое на катушку C, плавно снижаем со 100% до 0. Для катушки А напряжение, напротив, плавно увеличиваем с 0% до 100. Точно так же поступаем с парами А-В, В-C, C-Dи D-В. Обеспечивается плавное вращение, надёжный контроль, отличный крутящий момент. Главный недостаток – отсутствие точности, присущее аналоговым схемам.
5. Этот принцип обеспечивает более высокий крутящий момент. Реализуется он следующим образом. Подключается D и А: стрелка между D и А. Выключаем D: стрелка у А. Включаем В: стрелка между А и В. Выключаем А: стрелка у В. Включаем: стрелка между C и В. Выключаем В: стрелка у C. Включаем D: стрелка между D и C. Отключаем C – стрелка находится у D. Подключаем А – стрелка перемещается в точку между D и А. Процесс повторяется. Отличается от вышеописанного способа дробления шага (п.3) более высоким крутящим моментом.
Принципы 1, 2, 3 и 5 являются типовыми и применяются очень часто. Для них разработаны даже свои обозначения. Если принять положение «рядом с катушкой» за 1, а положение «между катушками» за 2, то обозначения будут следующими.
1 – «1 phase» (полношаговый). Стрелка фиксируется лишь на фазе «1». Данный метод используется редко, поскольку при нём обеспечивается недостаточный крутящий момент.
2 – «2 phase» (полношаговый). Стрелка фиксируется лишь на фазе «2».
3 – так как число фаз зависит от частоты дробления шага, то обозначений существует несколько. Например, «4: 2W1-2 phase» (2×2=4) обозначает, что переход из положения «перед катушкой» в «перед следующей катушкой» выполняется за 4 шага. А обозначение «8: 4W1-2 phase» (4×2=8) расшифровывается так же, только количество шагов равняется 8. Иначе такой механизм называется микрошаговым.
5 – «1-2 phase» (полушаговый). Стрелка фиксируется на обеих фазах – на «1» и «2».
ШД и драйвер шагового двигателя
 Вопрос: Что же такое шаговый двигатель и для чего он нужен?
Вопрос: Что же такое шаговый двигатель и для чего он нужен?
Ответ: Все шаговые двигатели — представляют из себя устройства, которые преобразуют электрические импульсы в перемещение вала шагового двигателя на определенный угол, которій зависит от конструкции двигателя. В отличие от обычных двигателей например асинхронніх, шаговые двигатели имеют огромніе отличия, которые и определяют их выгодные свойства при использовании их в некоторых областях применения.
Шаговый Двигатель по сути бесколлекторный двигатель постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель имеет высокую надежность и при правильной эксплуатации имеет очень длительный срок службы.
Самое большое применение Шаговый двигатель нашел в области где требуется очень высокая точность перемещений или скорости. Наглядные примеры такому применению это принтеры, копировальные машины, а так же более сложные устройства это станки с ЧПУ (Числовое программное управление) это фрезерные, гравировальные машины (например гравировальный станок Зубр 300).
Вопрос: Какие достоинства или недостатки имеются у шаговых двигателей по сравнению с обычными моторами?
Ответ:
Достоинства
— угол поворота ротора шагового мотора зависит от числа импульсов тока поданных на двигатель;
— шаговый двигатель имеет максимальный момент в режиме останова, в том случае если на обмотки двигателя подан ток;
— высокая точноть повторяемости и позиционирования, так к примеру качественные шаговые двигатели имеют точтость не хуже 2,5% от величины одного шага, при этом даже эта ошибка не накапливается при последующих шагах;
— шаговый двигатель может очень быстро стартовать, останавливаться и начинать реверсивное движение;
— высокая надежность шагового двигателя, обусловленна отсутствием щеток, поэтому срок службы шагового мотора ограничивается только сроком службы подшипников;
— постоянный угол поворота ротора от количества входных импульсов (в штатных режимах работы) позволяет выполнять позиционирование без применения устройств обратной связи;
— обеспечивает сверхнизкие скорости вращения вала двигателя, для нагрузки подведенной напрямую к валу двигателя без использования редуктора;
— работа в очень широком диапазоне скоростей, так как скорось напрямую зависит от количества входных импульсов.
Недостатки
— шаговый двигатель обладает явлением резонанса;
— возможен вариант когда двигатель выпадает из синхронизации отчего происходит потеря информации о положении, при работе в цепи обратной связи;
— при использовании стандартных схем подключения количество потребляемой двигателем энергии не уменьшается при отсутствии нагрузки;
— сложности управления двигателем при работе на высоких скоростях (требуется применение эффективных алгоритмов разгона и торможения)
— низкая удельная мощность шагового привода;
— для обеспечения эффективного управленя шаговым двигателем нужна очень сложная схама управления или другими словами драйвер ШД.
Вопрос: Каких типов бывают шаговые двигатели?
Ответ: В зависимости делятся по конфигурации обмоток:
а)Биполярный ШД — имеет четыре выхода, и содержит две обмотки.
б)Униполярный ШД — имеет шесть выходов. Содержит две обмотки, но каждая из обмоток имеет отвод из середины.
в)Четырехобмоточный ШД — имеет четыре независимые обмотки. По сути представляет собой тот же униполярный ШД, только обмотки его полность разделены.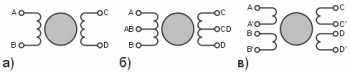
Вопрос: Где взять шаговый двигатель?
Ответ: Шаговые двигали получили очень широкое применение, и их можно найти например в устаревших пятидюймовых дисководах или старых матричных принтерах, которые ценятся у радиолюбителей. Так же шаговы двигатели есть и в старых флоппи дисководах, но они не находят второго применения из-за того что весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник который закреплен на раме дисковода, так что его можно применять только в родном исполнении, либо городить какуюто высокоточную крепежную конструкцию. Можно разобрать струйный или лазерный принтер, но опять же там применяются маломощные моторы. Так же можно их приобрести у нас или в другихмагазинах, которых предостаточно.
Вопрос: На какой минимальный угол повернется вал шагового двигателя?
Ответ: Вал двигателя может повернуться на 0,9 или 1,8 или 3,6 градуса (наиболее распространенные двигатели), но также угол поворота может быть разбит до 32 частей за счет использования специального драйвера ШД.
Вопрос: Что такое драйвер шагового двигателя?
Ответ: Драйвера шаговых двигателей применяются для управления биполярными и  униполярными шаговыми двигателями, для запуска с полным шагом, половинным и микрошагом. Они можно сказать действуют как посредники между компьютером или устройством управления и двигателем, поэтому должны подбираться по напряжению и уровню мощности, а также типу сигнала. Тип шагового двигателя является самым важным фактором при выборе драйвера шагового двигателя. В униполярном или биполярном двигателе ток проходит только в одном направлении по обмотке. Биполярные шаговые двигатели имеют всего две обмотки через которые поочереднопроходит ток. Двигатели например компании Fulling Motor, как биполярные так и униполярные имеют одинаковый крутящий момент, но достигается это при подачи разного управляющего тока. Шаговые двигатели с полным шагом приводятся в движение за счет изменениям магнитного поля обмоток относительно магнитного ротора. Полушаговые двигатели действуют также, как двигатели с полным шагом но угловое перемещение ротора составляет только половину целого шага. На каждом втором шаге запитана лишь одна из фаз, а в остальных случаях запитаны обе фазы. В результате угловое перемещение ротора составляет только половину угла. Микрошаговые режимы работы отличаются дискретным числом угловых перемещений угловых положений между каждым полным шагом. В микрошаговых драйверах двигателей используются электронные методы улучшения позиционирования за счет сложных алгоритмов системы управления.
униполярными шаговыми двигателями, для запуска с полным шагом, половинным и микрошагом. Они можно сказать действуют как посредники между компьютером или устройством управления и двигателем, поэтому должны подбираться по напряжению и уровню мощности, а также типу сигнала. Тип шагового двигателя является самым важным фактором при выборе драйвера шагового двигателя. В униполярном или биполярном двигателе ток проходит только в одном направлении по обмотке. Биполярные шаговые двигатели имеют всего две обмотки через которые поочереднопроходит ток. Двигатели например компании Fulling Motor, как биполярные так и униполярные имеют одинаковый крутящий момент, но достигается это при подачи разного управляющего тока. Шаговые двигатели с полным шагом приводятся в движение за счет изменениям магнитного поля обмоток относительно магнитного ротора. Полушаговые двигатели действуют также, как двигатели с полным шагом но угловое перемещение ротора составляет только половину целого шага. На каждом втором шаге запитана лишь одна из фаз, а в остальных случаях запитаны обе фазы. В результате угловое перемещение ротора составляет только половину угла. Микрошаговые режимы работы отличаются дискретным числом угловых перемещений угловых положений между каждым полным шагом. В микрошаговых драйверах двигателей используются электронные методы улучшения позиционирования за счет сложных алгоритмов системы управления.
Драйвера шаговых двигателей могут отличаются по электрическим характеристикам, параметрам их управления, размерам и техническим характеристикам. Наша компания предлагает драйвера MSD-300 позволяющие управлять шаговым двигателем с напряжением до 30 вольт, и током до 3 Ампер, а также позволяют дробить шаг до 32 раз. Параметры управления включают в себя особенности установки и управления. В некоторых драйверах используются ручные средства управления типа кнопок, DIP-переключателей или потенциометров, в нашем драйвере для задания режимов работы необходимо его подключить к ПК и с помощью специальной программы легко задать нужный режим.
Гравировка на граните
С древних времен известна ручная резьба по камню и стеклу, Еще в древности китайские мастера умели создавать высокохудожественные произведения из стекла и камня, которые пользовавались большим спросом

