Бесколлекторный электродвигатель
Бесколлекторный электродвигатель
Принцип работы трёхфазного вентильного двигателя
Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что контроллер такого двигателя обычно питается от постоянного напряжения.
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесколлекторных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессор обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор бесколлекторного электродвигателя
Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов — см. пример конструкции.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безынерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке. Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающееся магнитное поле.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера. Наличия микроконтроллера требует большое количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Градусы при расчете — электрические. Они меньше геометрических градусов в число пар полюсов ротора. Например, в ВД с ротором имеющим 3 пары полюсов оптимальный угол между векторами будет 90°/ 3 = 30°
Коммутация производится так, что поток возбуждения ротора — Ф 0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Контроллер ВД регулирует момент, действующий на ротор, меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
— Высокое быстродействие и динамика, точность позиционирования
— Широкий диапазон изменения частоты вращения
— Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
— Возможность использования во взрывоопасной и агрессивной среде
— Большая перегрузочная способность по моменту
— Высокие энергетические показатели ( КПД более 90 % и cosφ б олее 0,95 )
— Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
— Низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками
— Относительно сложная система управления двигателем
— Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
Из-за неразвитости электроники по-прежнему во многих случаях рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
Пример: 8-разрядные RISC-микроконтроллеры AVR в устройствах управления 3-фазными бесколлекторными электродвигателями постоянного тока
Трехфазные бесколлекторные электродвигатели постоянного тока обеспечивают превосходные характеристики, как при управлении с датчиками положения, так и без них.
Управление с датчиками используется, если момент сопротивления неизвестен или варьируется, а также, если необходимо достичь большого пускового момента.
Управление без датчиков, как правило, используется в вентиляторах, где позволяет избавиться от применения датчиков Холла и исключить проводные связи с ними.
Типичные сферы применения:
— Холодильное/морозильное оборудование (компрессоры)
— Системы нагрева, вентиляции и кондиционирования воздуха (например, вентиляторы)
Управление трехфазным бесколлекторным электродвигателем постоянного тока с датчиками положения на основе датчиков Холла
выходы датчиков Холла подключены к линиям ввода-вывода микроконтроллера, которые настроены на генерацию прерываний при изменении состояния
регулировка скорости выполняется с помощью ШИМ-каналов, подключенных к нижним драйверам.
Контроль тока выполняется с помощью АЦП и аналогового компаратора
Поддерживаемые интерфейсы связи: TWI, SPI и УАПП
Управление трехфазным бесколлекторным электродвигателем постоянного тока без датчиков
Управление трехфазным бесколлекторным электродвигателем постоянного тока без датчиков по положению:
— положение ротора определяется с помощью дифференциального АЦП;
— регулировка скорости выполняется с помощью ШИМ-каналов, подключенных к нижним драйверам.
Токовая перегрузка определяется с помощью АЦП или аналогового компаратора.
Поддерживаемые коммуникационные интерфейсы: TWI, SPI и УАПП.
Рекомендуемые микроконтроллеры: ATmega64, AT90PWM3.
Контроллер трехфазного бесколлекторного двигателя постоянного тока с минимальными ресурсами
Каковы должны быть минимальные ресурсы микроконтроллера, работающего в составе привода трехфазного BLDC-мотора? Для ответа на этот вопрос необходимо соотнести возможности чипсета с принципами управления указанного двигателя и предъявляемыми к устройству функциональными требованиями. Если мы рассматриваем рынок простых и дешевых схем управления скоростью в таких применениях, как вентиляторы и насосы, то проблема может быть существенно упрощена. Эти устройства работают при наличии или отсутствии датчиков (необходимых для определения положения ротора), что имеет ряд аргументов «за» и «против». Однако по количеству контактов I/O существенный выигрыш получается в случае, если сигнал положения ротора может быть снят с одного вывода. Кроме того, наличие многофункциональных выходов в пользовательском интерфейсе позволяет изменять их назначение. Благодаря этому, используя определенную технику минимизации, можно сократить количество задействованных контактов процессора и снизить таким образом требования к его ресурсам.
Система управления BLDC-мотором
На рис. 1 приведена блок-схема управления BLDC-мотором, содержащая датчик Холла для формирования обратной связи по положению ротора (как правило, используется три датчика), потенциометр задания скорости, кнопки включения и выключения системы, датчик перегрузки по току и трехфазный силовой каскад, соединенный с мотором.

Рис. 1. Блок-схема управления BLDC-мотором
Общее количество независимых подключений контроллера составляет 11 (пять входов и шесть выходов). Это число можно минимизировать в случае, если микроконтроллер поддерживает многофункциональность выводов и имеет развитую периферию.
Технология минимизации ресурсов
В случае, если используется стандартный шестиступенчатый алгоритм управления BLDC-мотором, в каждый момент времени только два транзистора инвертора (один в верхнем плече и один в нижнем) находятся во включенном состоянии. Управление ключами трехфазного силового каскада не является комплиментарным, транзисторы открываются в т. н. «диагональном режиме». С точки зрения минимизации логики это является преимуществом, поскольку два из трех ключей верхнего уровня закрыты при нормальной работе привода. Сигнал управления третьим транзистором может быть извлечен из двух других с помощью нескольких резисторов и транзисторного инвертора, подключенного к третьему входу верхнего уровня моста (см. рис. 4 — принципиальная схема). Таким образом удается сократить количество использованных выводов контроллера с шести до пяти.
Существует несколько различных путей оптимизации количества системных входов, предназначенных для подключения датчиков Холла, потенциометра, сенсоров тока перегрузки и ключей «Пуск/ Стоп». Датчики Холла, как правило, встраиваются в BLDC-двигатель, поэтому целесообразно интегрировать в мотор и схему, формирующую цифровой интерфейс для их связи с микроконтроллером. Выход подобной схемы выполняется в виде откры- того коллектора с «подтягивающим» резистором. В этом случае требуется один датчик Холла и один цифровой вход микросхемы семейства PIC12F.
Для запуска мотора и задания скорости при включении системы один из входов верхнего плеча трехфазного инвертора может быть сконфигурирован как аналоговый вход. Для реализации данной задачи этот вывод подключается к резистивному делителю и потенциометру уставки, что позволяет задать и считать значение скорости перед пуском мотора.
Ключ «Пуск» кроме основной задачи может нести и дополнительную функцию снижения уставки скорости ниже минимального значения. В аналоговом режиме работы входа, несмотря на то, что один из транзисторов верхнего плеча открывается, это не приводит к появлению тока в двигателе, поскольку все ключи нижнего плеча закрыты. Далее, при пуске мотора, данный контакт конфигурируется как выход управления транзистором верхнего плеча, а резисторы делителя начинают выполнять функцию «подтягивающих» или заземляющих.
Функцию остановки запущенного двигателя удобно выполнять в комбинированном режиме «Пуск/Стоп» в ходе цикла коммутации. Таким образом, остановка мотора реализуется программно-аппаратным методом в процессе выбега. Когда ключ «Стоп» нажимается при вращении, все сигналы управления транзисторами верхнего уровня блокируются, программа анализирует состояние мотора и запускает режим торможения. В простейшем случае функция остановки может выполняться нормально-разомкнутым тумблером, подключенным параллельно описанной выше цепи защиты от токовой перегрузки.
В схеме защиты от перегрузки по току не задействован ни один из выводов I/O микроконтроллера, для этой цели используется цепь подключения питания микросхемы семейства PIC12, позволяющая включить схему в режим перезагрузки при возникновении аварии. Этот тип PIC-контроллера имеет встроенный параллельный стабилизатор, соединенный с источником питания через резистор, номинал которого выбирается в зависимости от условий работы. Таким образом, в случае перегрузки питание микросхемы может быть отключено схемой защиты по току, подключенной параллельно стабилизатору.
В результате проведенной оптимизации системе требуется один выделенный цифровой вход, а также один цифровой/аналоговый и четыре цифровых вывода, выполняющих функции выходов. Здесь не учтен тот факт, что для управления скоростью необходима широтно-импульсная модуляция напряжения, поступающего на BLDC-мотор. В нашем случае контрольные импульсы должны поступать на транзисторы нижнего уровня. В реальности, поскольку в системе используется режим шестиступенчатого управления, ШИМ-сигнал в любой момент времени подается только на один из трех нижних ключей инвертора.
Некоторые PIC-контроллеры обладают особой периферией, способной формировать программный «моторный» ШИМ-сигнал, в то время как другие могут вырабатывать ШИМ-напряжение только на одном из n выходов. В последнем случае полный сигнал управления формируется с помощью, например, периферии ECCP (Enhanced Capture/ Compare Peripheral). В микросхеме PIC12F допускается комбинированное формирование ШИМ-сигнала посредством периферии ECCP или в режиме альтернативной конфигурации выводов (APCFG). Подобная возможность представляется очень удобной, поскольку импульсы могут вырабатываться через ECCP только по двум выводам, в то время как для работы схемы их требуется три, что доступно в режиме APCFG. На сегодняшний день в описанном режиме могут работать два контроллера семейства: PIC12F615 и PIC12HV615 (рис. 2).

Рис. 2. Аппаратная реализация схемы
Программа управления использует сигнал одного датчика Холла для синхронизации импульсов управления транзисторами инвертора, а также для определения моментов времени коммутации по так называемой технологии точного расчета траектории. Помимо всего прочего, это позволяет сформировать замкнутый контур управления скоростью при помощи простейшего ПИД-регулятора, на который поступает сигнал ошибки по скорости (рис. 3).

Рис. 3. Блок-схема управления скоростью мотора
Выход PI-контроллера загружается в регистр коэффициента заполнения импульсов CCPR1, занимая восемь старших разрядов. Выход подсистемы формирования ШИМ-сигнала коммутируется вместе с одним из трех транзисторов нижнего плеча инвертора, что позволяет осуществлять управление мотором и контроль скорости.
Три встроенных таймера PIC12 используются для измерения скорости двигателя по сигналу датчика Холла (TMR1), задания периода коммутации (TMR2) и генерации прерывания после окончания периода предварительного расчета (TMR0).
При включении питания считывается уставка скорости, после чего система может быть запущена с помощью ключа «Пуск». После подачи команды на запуск привода происходит оценка положения ротора и активируется программа формирования короткой разомкнутой петли регулирования. Она работает до тех пор, пока не будет продетектировано появление следующего сигнала датчика Холла. С этого момента времени коммутация инвертора синхронизируется с положением ротора. После успешной обработки двух сигналов датчика Холла программа переключается в режим работы с замкнутой обратной связью по скорости. При возникновении перегрузки по току активируется режим перезапуска питания POR (Power On Reset).
Аппаратная реализация системы управления включает трехфазный BLDC-мотор, низковольтный силовой модуль инвертора и контроллер PIC12F615, подключенный к модифицированной демо-плате Microchip. Было показано, что данная топология схемы позволяет использовать шесть I/O контактов микроконтроллера с многофункциональными выводами. Гибкая внутренняя периферия PIC12HV615 и встроенный параллельный регулятор дают возможность создать схему (рис. 4), выполняющую все необходимые для данного применения функции. Таким образом, создана основа для проектирования простых и дешевых систем управления скоростью в случаях, когда не требуется высокая точность работы привода.

Рис. 4. Принципиальная схема привода BLDC-мотора с контроллером PIC12HV615
⚡️ AC / DC ⚡️Двигатели постоянного тока и переменного для станков. Обзор основных различий

Бесщеточный двигатель — это не “ноухау” в мире технологий, а известная технология работы электродвигателя. Какие же преимущества, бесколлекторных двигателей для станочного оборудования их основные различия с Щеточными и Асинхронными ? Читать.
Бесколлекторный двигатель постоянного тока, он же бесщеточный двигатель, он же вентильный мотор в англоязычных источниках Brushless Direct Current Motor или Permanent Magnet Synchronous Motor ( нем. Bürstenlosen Gleichstrommotor ). История серийного развития данного двигателя начинается в 1960-х годов. Принцип работы бесколлекторного мотора происходит из его названия — отсутствие коллектора — функцию которого выполняет электроника.

ПРЕИМУЩЕСТВА БЕСЩЕТОЧНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА НА СТАНКЕ
Бесколлекторный двигатель применительно к станкам по дереву и станкам по металлу, обладает рядом преимуществ перед двигателями коллекторного типа, а именно:
- Отсутствие коллектора — сам по себе коллектор является сложным элементом в работе электродвигателя, который периодически требует обслуживания и ремонта. Соответственно, его отсутствие упрощает как конструкцию так и сервисное обслуживание.
- Бесщеточный двигатель — легче по конструкции и компактнее, что в свою очередь позволяет: облегчить конструкцию станка либо за счет равенства весовых параметров (если сравнивать по весу с коллекторным) получить двигатель большей мощности.
- Уменьшаются потери на коммутацию, роль щеток выполняют электронные ключи.
- Мощность двигателя на 1 кг веса больше + диапазон скоростей вращения расширяется.
- В практической работе бесколлекторный двигатель меньше греется, справляются с большими нагрузками.
Единственным недостатком данных двигателей является относительно дорогой электронный блок управления с датчиком.
Если же сравнивать типы двигателей AC (Асинхронный переменного тока) и BLDC (Бесщеточный постоянного тока) — то можно сказать с уверенностью, что они конкурируют в определенном смысле:
- АС — выигрывает по области применения и серийности мирового производства.
- BLDC — имеет преимущества по весу стоимости обслуживания и показателю мощности на единицу веса мотора.
Станок Бернардо BLDC / АС
Мощность BLDC / АС , Вт
Вес BLDC / АС , кг
750 / 550
50 / 50
BF 25 Super (бесщеточный мотор) / BF 30 G (асинхронный)
1300 / 1100
165 / 190
Hobby 300DC / Hobby300 VD Bernardo (асинхронный)
630 / 350
25 / 38
Hobby400 Super / Hobby500 VDM Bernardo (асинхронный)
700 / 800
50 / 130
На практике это означает: что можно купить станок с показателями мощности двигателя выше, либо подобрать такой же станок c меньшим весом и по меньшей цене.
Компания Бернардо всегда особое внимание уделяет подбору и проверке двигателя и предлагает в своем парке станков по дереву и металлу доступные модели как с бесщеточными двигателями постоянного тока BLDC, так и AC асинхронными переменного тока:
- Все станки по металлу с приставкой — Super/Супер/DC — оснащены бесколлекторными моторами. (например KF 20 Super или Хобби 400 Супер)
- Остальные модели деревообрабатывающих станков и станков по металлу оснащены AC электромоторами.
Для соответствия своего оборудование Европейским стандартам компания Бернадро производит:
внутренний контроль качества на производстве;
- контроль качества после поставки на склад;
- обеспечивает каждый станок знаком Европейской системы соответствия СE;
- сертифицирует оборудование при помощи сторонней экспертной организации TÜV.
Покупая станок по металлу или по дереву Bernardo вы становитесь обладателем европейского оборудования прошедшего контроль и готового к безопасной работе в мастерских и на серийных производствах.
БЕСКОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ BLDC
Бесколлекторные двигатели постоянного тока (BLDC — Brushless DC electric motor) часто используется в мотор-колесе электросамокатов и электровелосипедов. Его первые версии появились в 1960-х годах. Двигатели BLDC намного эффективнее и имеют гораздо больший крутящий момент.

Размещение постоянного магнита в роторе (внутренняя конфигурация) и управление окружающими катушками через транзисторы, позволило устранить самый важный недостаток щеточных (коллекторных) двигателей постоянного тока, которым являются сами щетки.
В альтернативной конфигурации (внешний ход) катушки якоря могут образовывать твердый сердечник, вокруг которого вращается ротор с постоянным магнитом, приводящий в движение вал двигателя. В обоих случаях катушки неподвижны.
Двигатели BLDC считаются двигателями с электронной коммутацией (ECM) в отличие от щеточных двигателей с механической коммутацией.

Общий принцип управления двигателем BLDC
Для двигателей BLDC требуются современные электронные контроллеры, которые могут определять положение ротора. Для этой цели можно использовать датчик Холла, реагирующий на положение каждой из катушек якоря при работающем двигателе. Скорость двигателя BLDC больше не может регулироваться напряжением, как в щеточных двигателях, а только путем изменения частоты переключения. Эти двигатели питаются от сигнала ШИМ, как показано на рисунке.
Двигатели BLDC делятся на 1-фазные, 2-фазные и 3-фазные, но принцип работы является общим для всех типов. Вместо механического коммутатора, изменяющего направление магнитного поля катушек ротора, используются транзисторы, которые непрерывно изменяют фазу напряжения подаваемого на катушку статора, что заставляет ротор непрерывно вращаться.
Однофазные бесколлекторные (бесщеточные) двигатели используются в устройствах с низким энергопотреблением, в то время как двухфазные чаще в устройствах средней мощности. Типичные области применения 3-фазных двигателей — устройства чтения компакт-дисков.
Управление однофазными двигателями BLDC
Однофазные двигатели BLDC имеют две параллельные обмотки якоря, управляемые напряжением ШИМ через мост H. Выходной сигнал одного датчика Холла постоянно меняет полярность тока, протекающего через обмотку якоря, таким образом поддерживая непрерывное вращение ротора. Однофазные двигатели BLDC очень просты в управлении. Для их работы достаточно одной интегральной микросхемы, например LB11970RV (однофазный двухполупериодный драйвер).

Принцип управления однофазным двигателем BLDC
Управление двухфазными двигателями BLDC

Двухфазные двигатели немного сложнее в управлении. Якорь состоит из 4 катушек, а магнитное поле создается 4 парами постоянных магнитов. Катушки якоря сгруппированы попарно, поэтому двухфазные двигатели имеют больший крутящий момент, чем однофазные.
Двухфазные двигатели обычно используются в некритических низкоуровневых устройствах, таких как большие вентиляторы, поэтому там не требуются сложные контроллеры. В результате двухфазные двигатели мощнее и дешевле. Драйверы, такие как например LB1668M, могут использоваться для их управления.
Управление 3-фазными двигателями BLDC
Трехфазные двигатели BLDC имеют 3 катушки якоря, соответствующие 6 состояниям коммутации. В каждую из катушек обычно помещают датчики Холла, которые реагируют на прохождения над ними постоянных магнитов, которые являются элементами ротора. Принцип использования сигналов от датчиков Холла показан на рисунке.

Конструкция двигателя BLDC с датчиками Холла
Тут тоже сигналы от датчиков Холла определяют моменты переключения. Эти сигналы через соответствующую систему подключения включают транзисторы, которые напрямую управляют катушками двигателя. Конечно, переключение в трехфазных двигателях происходит в 3 раза быстрее, чем в однофазных. Это приводит к снижению вибрации (дёргания) и более точному контролю скорости. Примером трехфазного драйвера двигателя BLDC с датчиками Холла является микросхема LB1976.

Принцип управления мотором BLDC с использованием датчиков Холла
Двигателями также можно управлять без датчиков Холла, используя сигнал BEMF (Back EMF) от каждой катушки. Этот сигнал получается путем сравнения напряжения, индуцированного в каждой из трех катушек, с центральным напряжением (точка COM). Результат такой связи усиливается и передается в систему определения положения ротора.
Сигналы от трех катушек преобразуются в формы импульсов, сдвинутых друг относительно друга на 120 °. Некоторые контроллеры используют простые компараторы для определения фазы каждой обмотки, другие требуют использования внешних микроконтроллеров. Трехфазный интегрированный бессенсорный контроллер LB11983 включает в себя датчик положения ротора со схемами запуска, синхронизации, переключения, тепловой защиты и контроля насыщения и не требует внешнего микроконтроллера.
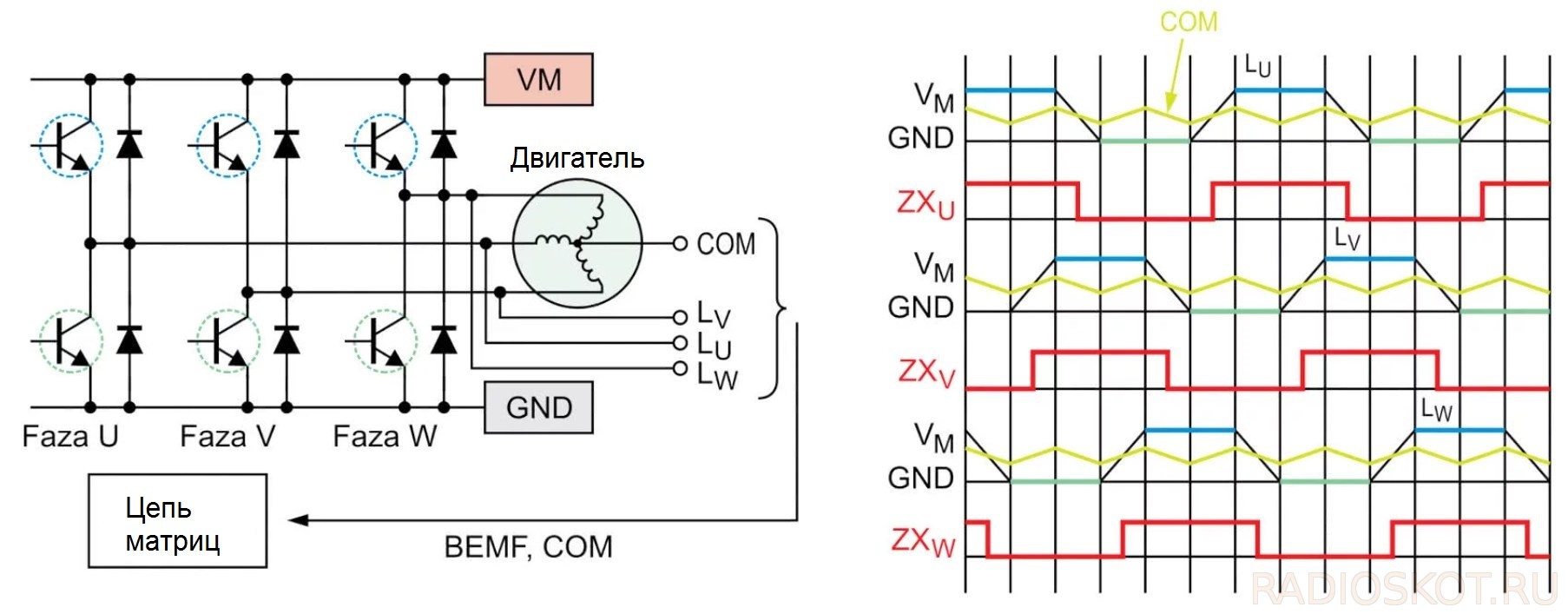
Принцип управления двигателем BLDC с помощью сигнала BEMF
Драйверы двигателей BLDC, использующие сигналы BEMF, имеют проблему с определением положения ротора во время запуска, потому что эти сигналы еще не генерируются. В этом случае двигатель запускается с неизвестного положения, то есть неизвестно положение статора относительно ротора. Это положение необходимо быстро распознать во время работы, потому что включение неправильной фазы может изменить направление вращения двигателя и даже сделать невозможной работу.