Драйверы шаговых двигателей KIPPRIBOR серии SMD
Драйверы шаговых двигателей KIPPRIBOR серии SMD
Драйвер шагового двигателя KIPPRIBOR серии SMD – устройство предназначенное для управления 2-фазными шаговыми двигателями. Функция драйвера – получить управляющие сигналы внешнего контроллера и на основании анализа этих сигналов запитать определенным образом обмотки шагового двигателя. Такую процедуру драйвер выполняет с частотой равной частоте тактовых импульсов. Каждая поступающая на драйвер команда изменяет состояние выходных силовых ключей, а следовательно и положение ротора двигателя. В качестве итога последовательного выполнения процедур мы наблюдаем вращательное движение ротора шагового двигателя.
Особенности драйверов шаговых двигателей KIPPRIBOR серии SMD:
Современная элементная. 32-битный DSP-процессор.
Регулирование выходного тока фазы позволяет адаптировать выходные параметры драйвера к характеристикам двигателя.
Режим микрошагового управления обеспечивает устойчивую работу двигателя на любых скоростях.
S -образная кривая разгона/торможения снижает перегрузки и минимизирует механический износ деталей привода.
Ограничения тока фазы в режиме удержания исключает перегрев обмоток двигателя.
Фильтрация управляющих импульсов позволяет снизить уровень вибраций.
Таблица соответствия драйверов и двигателей KIPPRIBOR здесь.
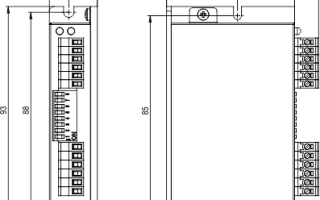
Габаритные и установочные размеры драйверов шаговых двигателей KIPPRIBOR серии SMD:
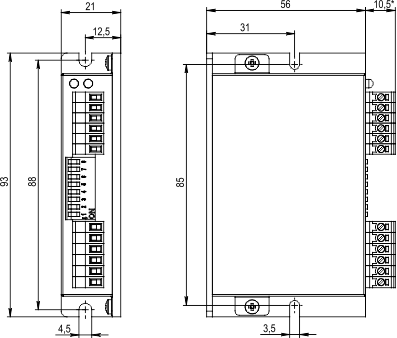
SMD-2O.17.16.R2
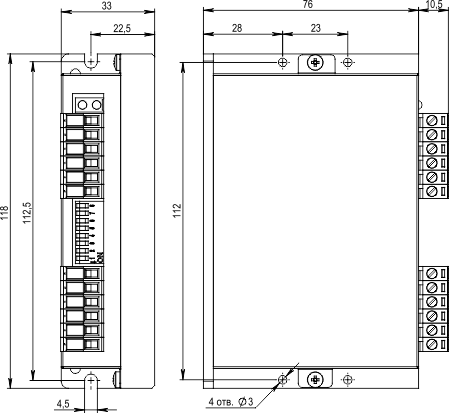
SMD-2O.24.40, SMD-2O.24.40.IO, SMD-2O.24.40.IR
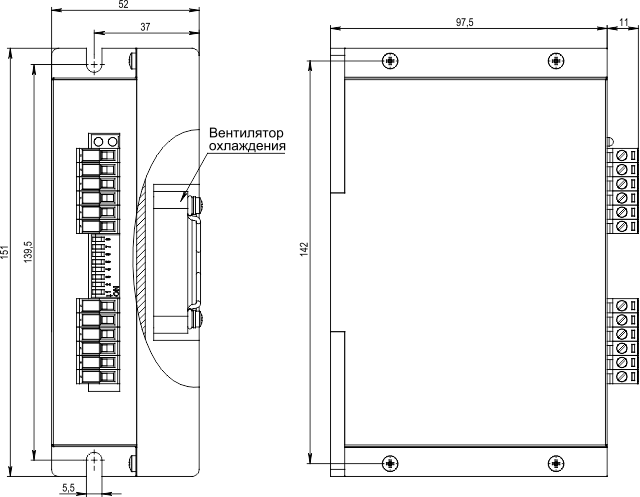
SMD-2O.34.60
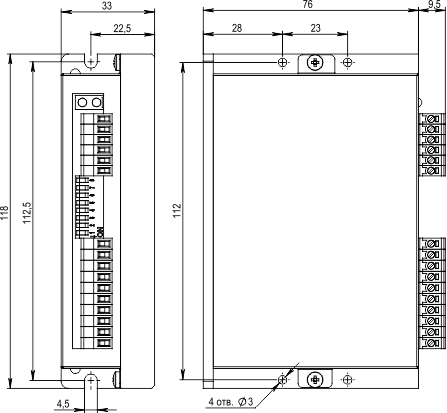
SMD-2O.24.40. 2IR
Драйверы SMD-2O.17.16.R2, SMD-2O.24.40
Драйвер SMD -2 O .24.40. IO
Драйвер SMD -2 O .24.40. IR

Драйвер SMD -2 O .24.40.2 IR
Драйвер SMD-2O.34.60
Таблицы настройки микрошагового режима драйверов шаговых двигателей KIPPRIBOR серии SMD:
В таблицах приведены комбинации положений микропереключателей и соответствующий этим комбинациям режим.
Драйвер KIPPRIBOR SMD-2O.17.16.R2
Микрошаговый режим (шагов на оборот)
Драйвер KIPPRIBOR SMD-2O.24.40
Микрошаговый режим(шагов на оборот)
Драйвер KIPPRIBOR SMD-2O.34.60
Микрошаговый режим(шагов на оборот)
Положение DIP-переключателей
Драйвер KIPPRIBOR SMD-2O.24.40.IO
Частота вращения, об/мин
Драйвер KIPPRIBOR SMD-2O.24.40.IR
Частота вращения, об/мин
Драйвер KIPPRIBOR SMD-2O.24.40.2IR
Частота вращения, об/мин
Положение DIP-переключателей
Таблицы настройки тока обмоток драйверов шаговых двигателей KIPPRIBOR серии SMD:
В таблицах представлено положение микропереключателей и соответствующее значение максимального тока, подаваемого в обмотку шагового двигателя.
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 0,3A | 0,2A | on | on | on |
| 0,5A | 0,3A | off | on | on |
| 0,7A | 0,5A | on | off | on |
| 1,0A | 0,7A | off | off | on |
| 1,3A | 1,0A | on | on | off |
| 1,6A | 1,2A | off | on | off |
| 1,9A | 1,4A | on | off | off |
| 2,2A | 1,6A | off | off | off |
SMD-2O.24.40
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 1,4A | 1,0A | on | on | on |
| 2,1A | 1,5A | off | on | on |
| 2,7A | 1,9A | on | off | on |
| 3,2A | 2,3A | off | off | on |
| 3,8A | 2,7A | on | on | off |
| 4,3A | 3,1A | off | on | off |
| 4,9A | 3,5A | on | off | off |
| 5,6A | 4,0A | off | off | off |
SMD-2O.34.60
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 2,4A | 2,0A | on | on | on |
| 3,1A | 2,6A | off | on | on |
| 3,8A | 3,1A | on | off | on |
| 4,5A | 3,7A | off | off | on |
| 5,2A | 4,3A | on | on | off |
| 5,8A | 4,9A | off | on | off |
| 6,5A | 5,4A | on | off | off |
| 7,2A | 6,0A | off | off | off |
SMD-2O.24.40.IO
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 1,4A | 1,0A | on | on | on |
| 2,1A | 1,5A | off | on | on |
| 2,7A | 1,9A | on | off | on |
| 3,2A | 2,3A | off | off | on |
| 3,8A | 2,7A | on | on | off |
| 4,3A | 3,1A | off | on | off |
| 4,9A | 3,5A | on | off | off |
| 5,6A | 4,0A | off | off | off |
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 1,4A | 1,0A | on | on | on |
| 2,1A | 1,5A | off | on | on |
| 2,7A | 1,9A | on | off | on |
| 3,2A | 2,3A | off | off | on |
| 3,8A | 2,7A | on | on | off |
| 4,3A | 3,1A | off | on | off |
| 4,9A | 3,5A | on | off | off |
| 5,6A | 4,0A | off | off | off |
SMD-2O.24.40.2IR
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | ||||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 | SW4 |
| 0,3 | 0,2 | on | on | on | on |
| 0,5 | 0,4 | off | on | on | on |
| 0,7 | 0,5 | on | off | on | on |
| 1,0 | 0,7 | off | off | on | on |
| 1,3 | 0,9 | on | on | off | on |
| 1,6 | 1,1 | off | on | off | on |
| 1,9 | 1,4 | on | off | off | on |
| 2,2 | 1,6 | off | off | off | on |
| 2,5 | 1,8 | on | on | on | off |
| 2,8 | 2,0 | off | on | on | off |
| 3,2 | 2,3 | on | off | on | off |
| 3,6 | 2,6 | off | off | on | off |
| 4,0 | 2,9 | on | on | off | off |
| 4,4 | 3,1 | off | on | off | off |
| 5,0 | 3,6 | on | off | off | off |
| 5,6 | 4,0 | off | off | off | off |
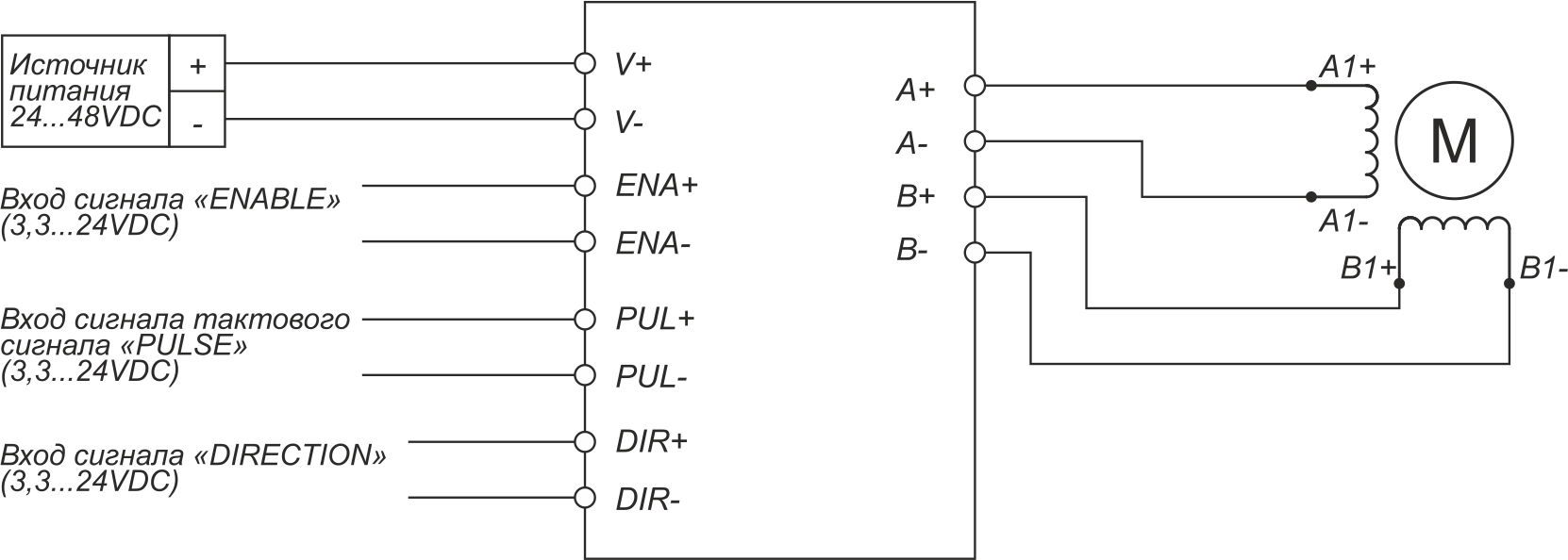
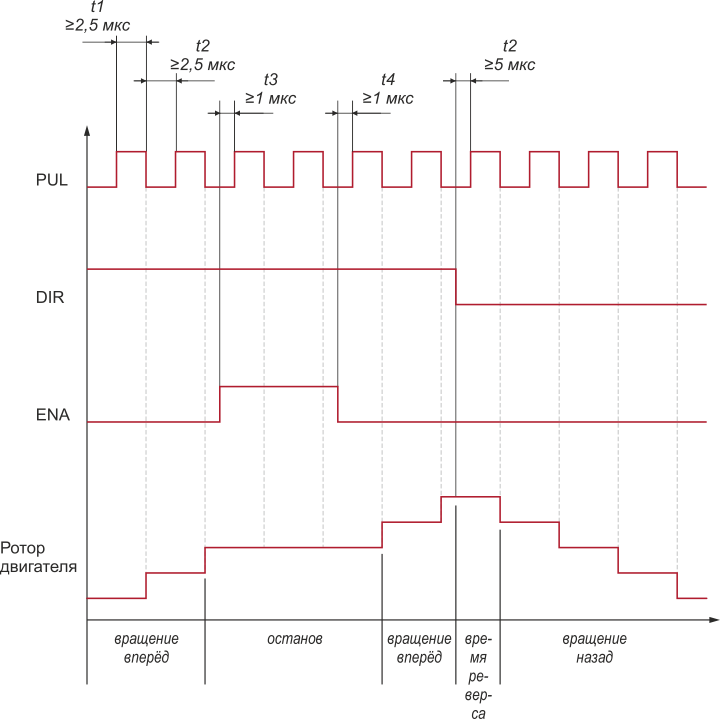
Параметры управляющих сигналов
Требования к форме и длительности управляющих сигналов
Сигнал STEP – последовательность тактовых импульсов, сигналы DIR и ENA – потенциальные сигналы. Амплитуда логической «1» управляющих сигналов должна быть в пределах 3,3…24VDC, логического «0» в пределах 0…2,3 VDC
Параметры управляющих сигналов
Структура условного обозначения
Структура условного обозначения драйверов шаговых двигателей KIPPRIBOR серии SMD:
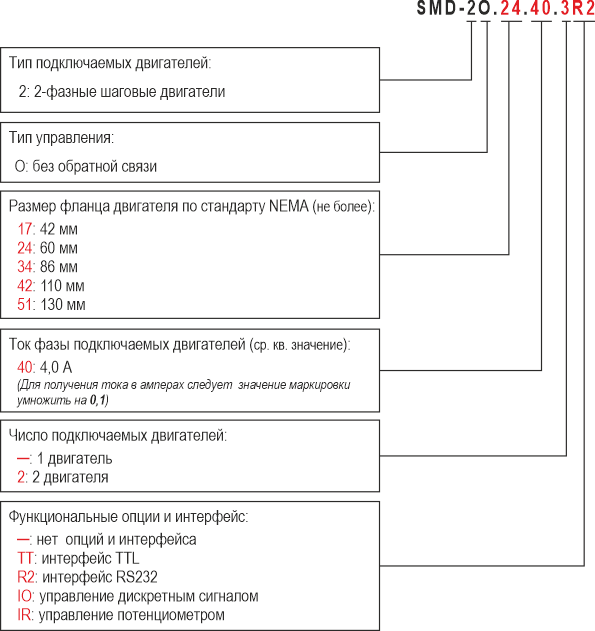
Например: SMD-2O.24.40
Вы заказали: драйвер KIPPRIBOR серии SMD без обратной связи для 2-фазного шагового двигателя с размером фланца 60 мм и максимальным током фазы 4,0 А. Число подключаемых двигателей – 1.
Драйверы шаговых двигателей A4988 и DVR8825
В статье мы разберем режимы управления вращением шаговых двигателей. Подробно рассмотрим подключение драйвера A4988.
Шаговые моторы имеют три режима управления вращением: полношаговый, полушаговый и микрошаговый.
Во время полношагового режима шаговые моторы для поворота мотора на 360 градусов делают 200 шагов, во время полушагового — 400, а во время микрошагового возможно делить шаг на 4, 8 и даже 16 частей. Техника управления микрошаговым режимом сложна, поэтому многие производители станков ЧПУ (CNC) и качественных 3D принтеров стали изготавливать специальные контроллеры для управления шаговыми двигателями, часто называемых драйверами шаговых моторов. Ещё их называют StepStick.
Функционирование специальных контроллеров управления (драйверов шаговых двигателей) происходит следующим образом: вначале напряжение питания поступает на шаговый двигатель, затем на логическую часть драйвера шаговика, после этого задается направление вращения и команда (ШАГ) по управляющим контактам на двигателе. Во время команды (ШАГ) шаговый мотор получает необходимое напряжение, которого достаточно для передвижения ротора на один микрошаг (полушаг или шаг) – это зависит от предварительных установок, заданных заранее специальными перемычками на RAMPS 1.4.
Зачастую у продаваемых контроллеров шаговых двигателей (например: RAMPS 1.4) предустановлен режим микрошага 1/16. Чтобы регулировать подаваемое на шаговый мотор напряжение питания, на котроллере RAMPS 1.4 установлен специальный переменный резистор. Он является важным элементом, поскольку шаговики могут быть под 8V, 4V, 12V и д.р.
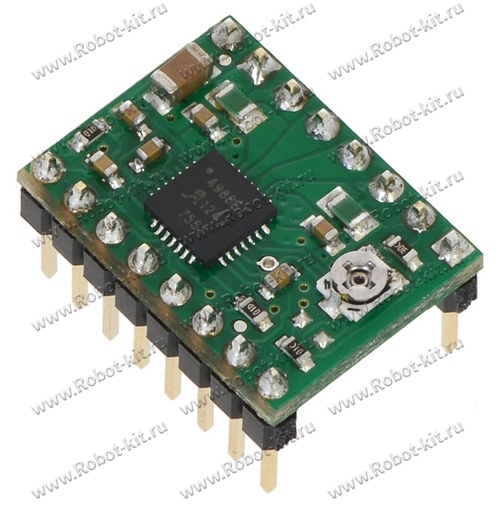
Для платы RAMPS 1.4 выпускают два вида драйверов A4988 и DVR8825. Они отличаются током, выдаваемым на шаговый двигатель и минимальным микрошагом.
И не только. Выпускаются несколько других драйверов шаговых двигателей, которые могут быть использованы в качестве альтернативы. Например, у драйвера шагового двигателя Pololu A4988 Black Edition производительность на 20% выше. Есть также большая версия драйвера на A4988, которая имеет защиту от обратной мощности на главном входе питания, а также встроенной 5 В и 3.3 В стабилизаторы напряжения, которые устраняют необходимость в покупке отдельного питания для логики и двигателей. Платы на DRV8825 предлагают на около 50% более высокую производительность в более широком диапазоне напряжений и с несколькими дополнительными функциями, в то время как платы на DRV8834 работают с двигателями с напряжением питания от 2.5 В. Любую из этих плат можно использовать в качестве драйвера во многих приложениях.
Рассмотрим драйвер A4988.
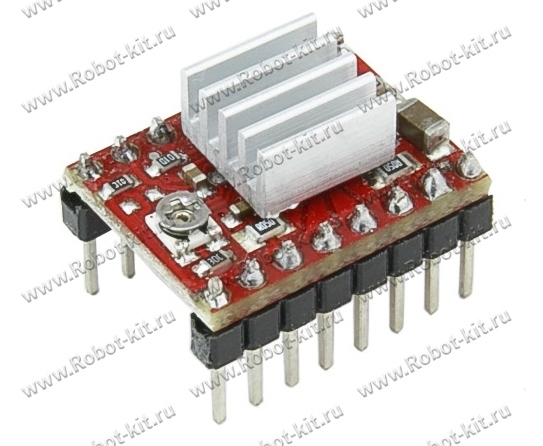
Характеристики драйвера A4988
- Максимальный ток 2 A
- Минимальный микрошаг 1/16 шага
Величина тока регулируется подстроечным резистором на драйвере. Вращение по часовой стрелке — повышение тока. Вращение против часовой стрелки — понижение величины тока.
Установка микрошага производится перемычками установленными на RAMPS 1.4
Схема драйвера A4988
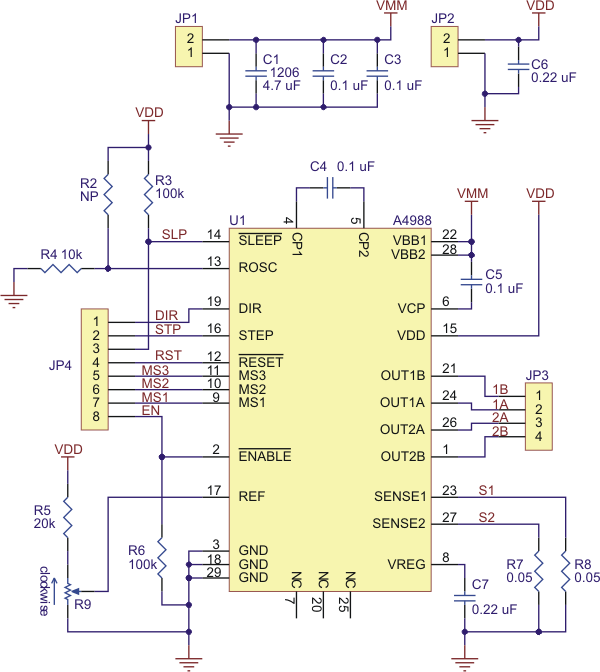
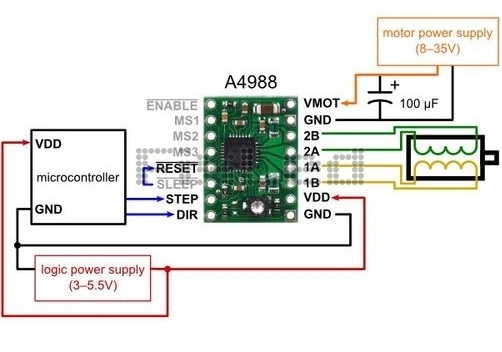
Подключение драйвера A4988
Для работы с драйвером A4988 необходимо питание логического уровня (3 — 5.5 В), подаваемое на выводы VDD и GND, а также питание двигателя (8 — 35 В) на выводы VMOT и GND. Чтобы обеспечить необходимый потребляемый ток (при пиковых до 4 А), необходимо поставить конденсаторы для гальванической развязки как можно ближе к плате.
Внимание: В плате используются керамические конденсаторы с низким эквивалентным последовательным сопротивлением, что делает её уязвимой для индуктивно-ёмкостных скачков напряжения, особенно если питающие провода длиннее нескольких сантиметров. В некоторых случаях, эти скачки могут превысить максимально допустимое значение (35 В для A4988) и повредить плату. Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате.
При правильном подключении, через Pololu A4988 можно управлять четырёх-, шести- и восьми- проводными шаговыми двигателями.
Внимание: Соединение или разъединение шагового двигателя при включённом драйвере может привести к поломке двигателя.
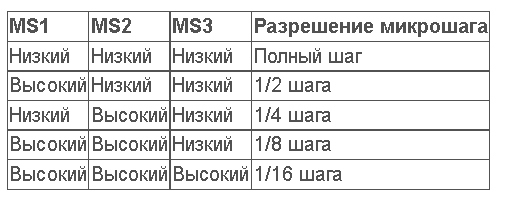
Установка микрошага
У шаговых двигателей обычно установлена конкретная величина (например 1,8° или 200 шагов на оборот), при которой достигается полный оборот в 360°. Микрошаговый драйвер, такой как A4988 позволяет увеличить разрешение за счёт возможности управления промежуточными шагами. Это достигается путём возбуждения обмоток средней величины тока. Например, управление мотором в режиме четверти шага даст двигателю с величиной 200-шагов-за-оборот уже 800 микрошагов при использовании разных уровней тока.
Разрешение (размер шага) задаётся комбинациями переключателей на входах (MS1, MS2, и MS3). С их помощью можно выбрать пять различных шагов, в соответствии с таблицей ниже. На входы MS1 и MS3 переключателя установлены 100 кОм подтягивающие на землю резисторы, а на MS2 — 50 кОм, и если оставить их не подключёнными, двигатель будет работать в полношаговом режиме. Для правильной работы в режиме микрошага необходим слабый ток (см. ниже), который обеспечивается ограничителями по току. В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
Обычно для домашних 3D принтеров и станков ЧПУ используются драйверы A4988 с микрошагом 1/16. Для этого все перемычки на плате RAMPS 1.4 должны быть установлены на свои гнезда.
Входы управления
Каждый импульс на входе STEP соответствует одному микрошагу двигателя, направление вращения которого зависит от сигнала на выводе DIR. Обратите внимание, что выводы STEP и DIR не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому вы не должны оставлять эти выводы плавающими при создании приложений. Если вы просто хотите вращать двигатель в одном направлении, вы можете соединить DIR непосредственно с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RST, SLP и EN. Обратите внимание, что вывод RST плавает; если вы его не используете, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы подать на него высокий уровень и включить плату.
Ограничение тока
Для достижения высокой скорости шага, питания двигателя, как правило, гораздо выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный ток 1 А с 5 Ом; сопротивлением обмотки, отсюда максимально допустимое питание двигателя равно 5 В (U=I*R). Использование же такого двигателя с питанием 12 В позволит повысить скорость шага. Однако чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
Драйвер A4988 поддерживает активное ограничение тока, которое можно установить подстроечным потенциометром на плате.
Один из способов установить предельный ток — подключить драйвер в полношаговый режим и измерять ток, протекающий через одну обмотку двигателя без синхронизации по входу STEP. Измеренный ток будет равен 0,7 части предельного тока (так как обе обмотки всегда ограничиваются примерно на 70% от текущей настройки предельного тока в полношаговом режиме). Учтите, что при изменении логического напряжения Vdd, на другое значение, изменит предельный ток, поскольку напряжение на выводе «ref» является функцией Vdd.
Еще один способ установить предельный ток – измерить напряжение на выводе «ref» и вычислить полученное ограничение тока (резисторы SENSE равны 0,05 Ом). Напряжение вывода доступно через металлизированное сквозное отверстие (в кружке на шёлкографии печатной платы). Ограничение тока относится к опорному напряжению следующим образом:
Current Limit = VREF × 2,5
Например: опорное напряжение равно 0,3 В, предельный ток 0,75 А. Как упоминалось выше, в режиме полного шага, ток через катушки ограничен 70% от текущего предела, поэтому, чтобы получить полный шаг тока катушки в 1 А, текущий предел должен быть 1 A / 0,7 = 1,4 А, что соответствует VREF 1,4 A / 2,5 = 0,56 В. Смотрите спецификацию A4988 для получения дополнительных сведений.
Примечание: Ток обмотки может сильно отличаться от тока источника питания, поэтому не следует измерять ток на источнике питания, чтобы установить ограничение тока. Подходящим местом для измерения тока является одна из обмоток вашего шагового двигателя.
Величину тока на драйвере шагового мотора настроить и опытным путём. Необходимо устроить прогон 3D принтера на высокой скорости по всем координатам. Оптимальным считается, когда шаговые двигатели уже не гудят и ещё не пропускают шаги.
Внимание: При регулировке тока подстроечным резистором на драйвере A4988. Вращение по часовой стрелке — повышение тока. Вращение против часовой стрелки — понижение величины тока.
Максимально допустимый ток подаваемый на обмотку, у микросхемы A4988 равен 2 A. Фактический ток, который можно подать на плату, зависит от качества охлаждения микросхемы. Плата разработана с учётом отвода тепла от микросхемы, но при токе выше 1 A на обмотку необходим теплоотвод или другое дополнительное охлаждение.
Внимание: плата драйвера может нагреться так, что можно получить ожог, задолго до того как перегреется сама микросхема. Будьте осторожны при обращении с платой и со всеми подключёнными к ней устройствами.
Обратите внимание, что ток, измеренный на источнике питания, как правило, не соответствует величине тока на обмотке. Так как напряжение, подаваемое на драйвер, может быть значительно выше напряжения на обмотке, то, соответственно, измеряемый ток на источнике питания может быть немного ниже, чем ток на обмотке (драйвер и обмотка в основном работают в качестве переключаемого источника с пошаговым понижением питания). Кроме того, если напряжение питания намного выше необходимого двигателю уровня для достижения требуемого тока, то скважность будет очень низкой, что также приводит к существенным различиям между средним и RMS током (среднеквадратичное значение переменного тока).
Драйвер шагового двигателя DM2282
Показать оптовые цены

| День | Время работы | Перерыв |
|---|---|---|
| Понедельник | 09:00 — 18:00 | |
| Вторник | 09:00 — 18:00 | |
| Среда | 09:00 — 18:00 | |
| Четверг | 09:00 — 18:00 | |
| Пятница | 09:00 — 18:00 | |
| Суббота | Выходной | |
| Воскресенье | Выходной |
* Время указано для региона: Россия, Санкт-Петербург
Драйвер шагового двигателя Leadshine DM2282
Одна из самых популярных моделей драйверов шаговых двигателей Leadshine в мире, драйвер DM2282 предназначен для управления мощными биполярными моторами типоразмеров NEMA 34, NEMA 42, NEMA 51 с двумя/четырьмя/восьмью обмотками. Производитель Leadshine достойно занимает одно из ведущих мест в мире по выпуску драйверов для шаговых двигателей. Серия DM драйверов ШД Leadshine — цифровые драйверы нового поколения с усовершенствованными алгоритмами управления, драйверы позволяют добиться от шаговых моторов различных марок отличной динамики и хорошей плавности хода и обеспечить высокий крутящий момент на больших скоростях. Драйвер DM2282 на основе тридцатидвухразрядного DSP-процессора имеет возможность быстрой интеллектуальной, умной подстройки под разные параметры обмоток шаговых двигателей — есть режим автоматической настройки параметров работы драйвера.
- Ток обмотки фазы от 1.6 до 5.9 А (RMS), пиковый ток — от 2.2 до 8.2 А
- Напряжение питания 80 — 220 VAC, либо можно питать от постоянного тока 115 — 305 VDC
- 16 режимов деления шага: целый шаг и микрошаг до 1:512 (до 1:128 при помощи DIP-переключателей и до 1:512 при настройке с помощью программного обеспечения, при настройке микрошаго при помощи специализированного ПО от Leadshine микрошаг можно установить любым, не обязательно кратным степени двойки
- Полная компенсация резонанса на средних и низких частотах
- Автоподстройка под различные модели шаговых двигателей
- Режимы управления STEP/DIR и CW/CCW
- Оптоизолированные входы STEP, DIR, ENABLE и оптоизолированный выход FAULT (авария
- Автоматическое снижение рабочего тока обмотки при простое двигателя, значение тока удержания при простое мотора настраивается
- Встроенные защиты — от короткого замыкания, от неправильного подключения обмоток мотора, от обрыва (отсоединения) обмоток на ходу, от превышения питающего напряжения
 | На российском рынке представлены аналоги драйверов Leadshine другого производителя — Guangzhou Sankong Technology Co., Ltd с логотипом Leadshine. Продукция этого завода отличается по качеству от Leadshine в худшую сторону. Наша компания предлагает только оригинальные драйверы Leadshine, будьте внимательны! |
Установка рабочего тока обмотки
При помощи DIP-переключателей SW1, SW2, SW3 можно выставлять целевой рабочий ток обмотки (RMS). Значение тока обмотки также можно управнавливать при помощи программного обеспечения, все три переключателя при этом выставляются в положение OFF.
| ТОК (пиковый), Ампер | ТОК (RMS), Ампер | SW1 | SW2 | SW3 |
| DEFAULT | DEFAULT | OFF | OFF | OFF |
| 2.2 | 1.6 | OFF | OFF | OFF |
| 3.2 | 2.3 | OFF | ON | OFF |
| 4.2 | 3.2 | ON | ON | OFF |
| 5.2 | 3.7 | OFF | OFF | ON |
| 6.3 | 4.4 | ON | OFF | ON |
| 7.2 | 5.2 | OFF | ON | ON |
| 8.2 | 5.9 | ON | ON | ON |
Режимы микрошага
При помощи DIP-переключателей мсожно устанавливать микрошаг до 1:128, доступные варианты дробления шага приведены в таблице ниже, такая же таблица расположена на передней грани корпуса устройства. При помощи программного обеспечения можно устанавливать произвольный микрошаг до 1:512.
Блоки управления
Драйвер шагового двигателя SMD-8.0DIN
SMD-8.0DIN является драйвером шаговых двигателей нового поколения, поддерживает два режима управления и показывает отличную динамику и высокий момент на больших скоростях. Блок предназначен для работы с шаговыми двигателями с током фазы до 8.0 А в биполярном режиме. Крепление драйвера на стандартную DIN рейку облегчает его размещение в условиях производства.
Способы управления шаговым двигателем:
- Импульсное управление положением
- Аналоговое управление скоростью
Дополнительные возможности:
- Встроенный тормозной резистор для работы с высокоинерционной нагрузкой
- Возможность подключения внешнего тормозного резистора
- Автоматический переход между токовым (с более высоким моментом и лучшей динамикой) и вольтовым (с более плавной и тихой работой) режимами управления фазами
- Дробление шага до 1/128
- Выбор значения тока удержания 70% или 100%
- Возможность инвертирования сигнала Enable
Принципиальное отличие этого драйвера от предыдущих исполнений — новая конструкция и улучшенная схемотехника, которые обеспечивают очень быстрый разгон и сохранение значительного крутящего момента на высоких скоростях. Разгон до скоростей 1000 об/мин и более может осуществляться за доли секунды. Рабочая скорость более 4000 об/мин с поддержанием крутящего момента, достаточного для выполнения полезной работы теперь доступна для большинства моделей шаговых двигателей.


| Технические характеристики драйвера шагового двигателя SMD-8.0DIN | |
|---|---|
| Напряжение питания | 24. 48В |
| Режимы дробления шага | 1, 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128 |
| Максимальный ток фазы двигателя | 8,0А |
Размеры драйвера шаговых двигателей SMD-4.2
В зависимости от поставленной задачи блок управления может использоваться в одном из двух режимов управления — импульсное управление положением для решения задач позиционирования, управление скоростью аналоговым сигналом — для задач поддержания и регулирования скорости.
В режиме импульсного управления положением есть возможность инверсии сигнала разрешения EN.
Драйвер SMD-8.0DIN предусматривает два варианта коммутации обмоток шагового двигателя:
- Токовое регулирование — при дроблении шага от 1 до 1/16
- Вольтовое регулирование — при дроблении шага от 1/32 до 1/128
При токовом режиме управления контролируется максимальный ток, подаваемый на фазу двигателя. Для управления в этом режиме можно использовать любой шаговый двигатель с установкой максимального тока в настройках контроллера. Этот режим управления характеризуется большим крутящим моментом, высокой скоростью вращения, но ограничен максимальной величиной дробления до 1/16 от основного углового шага ШД.
Вольтовый режим управления характеризуется большей плавностью хода и возможностью дробления шага двигателя до 1/128 от величины основного углового шага. Однако, скорость и крутящий момент на выходном валу двигателя в этом режиме управления ниже по сравнению с токовым режимом. Режим вольтового управления может использоваться только с теми шаговыми двигателями, список параметров которых сохранен в памяти блока.
Контроллеры

Аналоговые драйверы шаговых двигателей

Цифровые драйверы шаговых двигателей

Драйверы шаговых двигателей с энкодером

Многоосевые

Контроль высоты плазмы
Драйвер шагового двигателя
Шаговый двигатель – это электромеханическое устройство, преобразующее энергию электрических импульсов, подаваемых в определенной последовательности на обмотки статора, во вращательное движение ротора и дискретные перемещения связанного с ним через редуктор механизма. Он применяется в различных устройствах, оборудовании и производственных линиях, где необходимо добиться четкого позиционирования рабочего органа. Для правильной работы такого электромотора требуется специальное автоматическое управление, которое будет регулировать очередность подачи импульсов. Эти функции выполняет драйвер шагового двигателя.
Из чего состоит драйвер для шагового двигателя: назначение и виды
Главным назначением драйверов является обеспечение работы шаговых двигателей (ШД) в соответствии с заданным алгоритмом, что подразумевает решение следующих задач:
- подачу тока заданной величины и направления в конкретную обмотку статора двигателя;
- удержание этого тока определенный период времени;
- осуществление последовательного включения и выключения токов, с перенаправлением их в разные обмотки, для обеспечения заданных мощностных и скоростных характеристик привода, в соответствии с поставленной задачей.
Любой драйвер ШД состоит из двух основных частей:
- силового блока;
- контроллера ШД.
В силовую часть входит электронная плата, на которой собран полупроводниковый усилитель мощности. Она служит для подачи тока и от ее параметров зависит мощность создаваемого на валу момента.
Контроллер шагового двигателя является интеллектуальной составляющей, предназначенной для управления силовой частью.
Сегодня существует много разновидностей драйверов шаговых двигателей, которые классифицируются на виды по различным критериям, в том числе:
- по направлению тока, подаваемого на статор импульса: униполярные, биполярные и драйверы с гасящими резисторами;
- по способу закачки импульса в обмотки: драйверы постоянного напряжения, двухуровневые или ШИМ-драйверы;
- по типу управляющего сигнала: аналоговые или цифровые.
Купить драйвер или контроллер шагового двигателя любого типа от ведущих мировых брендов по наиболее справедливой цене на рынке можно в нашей компании «Рефит». Мы сотрудничаем напрямую с производителями и гарантируем высокое качество наших товаров.


detector