Что такое двигатель параллельного возбуждения
Что такое двигатель параллельного возбуждения




§ 138. Электродвигатель с параллельным возбуждением
На рис. 318 представлена схема двигателя с параллельным возбуждением и включенным в цепь якоря пусковым реостатом. Так как обмотка возбуждения включена параллельно в сеть, то при постоянном сопротивлении цепи возбуждения и напряжении сети магнитный поток Φ двигателя должен быть постоянным.
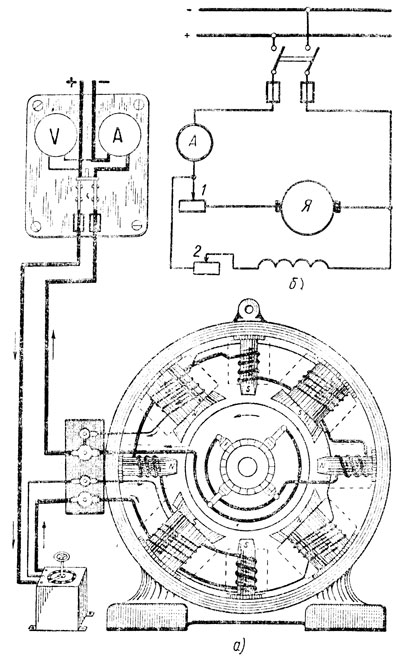
Рис. 318. Электродвигатель с параллельным возбуждением: а — схема устройства, б — электрическая схема соединения и включения в сеть; 1 — пусковой реостат, 2 — регулировочный реостат
| n = | E | = | U — Iяrя |
| cΦ | cΦ |
видно, что величина противо-э.д.с. двигателя уменьшается с увеличением тока якоря, отчего скорость двигателя также уменьшается.
Однако, как уже говорилось ранее, величина падения напряжения в якорной обмотке Iа⋅rа очень мала в сравнении с напряжением U. Поэтому с увеличением нагрузочного тока скорость вращения двигателя снижается незначительно.
Отсюда характерным свойством двигателя с параллельным возбуждением является почти постоянная скорость вращения при изменении нагрузки на его валу. Обычно скорости у двигателей этого типа при достижении полной нагрузки уменьшаются лишь на 3-5%.
Вращающий момент двигателя пропорционален произведению тока якоря на величину магнитного потока:
Отсюда видно, что момент вращения двигателя с параллельным возбуждением пропорционален току якоря:
Следовательно, по амперметру, включенному в цепь якоря, можно судить о нагрузке двигателя.
Наибольшая скорость вращения будет у двигателя при холостом ходе, если при этом сопротивление регулировочного реостата полностью выведено. Размыкание цепи возбуждения вызовет уменьшение магнитного потока двигателя до незначительной величины потока остаточного магнетизма. Так как противо-э.д.с. должна быть почти равна напряжению сети, то с уменьшением магнитного потока скорость вращения двигателя резко возрастет и станет опасной для механической прочности двигателя. Поэтому при эксплуатации двигателя необходимо следить за исправным состоянием цепи возбуждения.
Регулирование скорости вращения двигателя с параллельным возбуждением обычно производится путем изменения магнитного потока с помощью регулировочного реостата в цепи возбуждения. Этот способ регулирования скорости является наиболее экономичным. Регулирование скорости у некоторых двигателей лежит в пределах от 1,5:1 до 4:1. Цифры показывают отношение максимальной скорости к минимальной. Пределы регулирования ограничиваются в основном ухудшением условий коммутации и механической прочностью якоря.
Изменение направления вращения двигателей с параллельным возбуждением можно производить изменением направления тока в обмотке возбуждения полюсов или изменением направления тока в обмотке якоря. Обычно перемена вращения осуществляется вторым способом, так как всякие операции с обмоткой возбуждения опасны для обслуживающего персонала и нежелательны ввиду появления э.д.с. самоиндукции, могущей вызвать пробой изоляции обмотки и обгорание контактов.
Двигатели с параллельным возбуждением применяются в сетях постоянного тока для привода некоторых станков, механизмов (подвесные электрические дороги, насосы, вентиляторы, ткацкие машины, прокатные станы, шахтные подъемники), требующих постоянной скорости вращения или широкой регулировки скорости.
Портал о домашнем оборудовании
Наличие обмотки возбуждения (ОВ) у двигателя постоянного тока позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
Двигатель с независимым возбуждением
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.
ДПТ с параллельным возбуждением
По сути, схема подключения ОВ с параллельным возбуждением(рис.2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.

ДПТ с последовательным возбуждением
При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”.

ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют его рабочие свойства.
Скоростная и механическая характеристики двигателя определяются равенствами (7) и (9), представленными в статье » «, при U = const и i в = const. При отсутствии дополнительного сопротивления в цепи якоря эти характеристики называются естественными .
Если щетки находятся на геометрической нейтрали, при увеличении I а поток Ф δ несколько уменьшится вследствие действия поперечной реакции якоря . В результате этого скорость n , согласно выражению (7), представленному в статье «Общие сведения о двигателях постоянного тока «, будет стремится возрасти. С другой стороны, падение напряжения R а × I а вызывает уменьшение скорости. Таким образом, возможны три вида скоростной характеристики, изображенные на рис. 1: 1 – при преобладании влияния R а × I а; 2 – при взаимной компенсации влияния R а × I а и уменьшения Ф δ ; 3 – при преобладании влияния уменьшения Ф δ .
Ввиду того что изменение Ф δ относительно мало, механические характеристики n = f (M ) двигателя параллельного возбуждения, определяемые равенством (9), представленным в статье «Общие сведения о двигателях постоянного тока «, при U = const и i в = const совпадают по виду с характеристиками n = f (I а) (рисунок 1). По этой же причине эти характеристики практически прямолинейны.
Характеристики вида 3 (рисунок 1) неприемлемы по условиям устойчивой работы (смотрите статью » «). Поэтому двигатели параллельного возбуждения изготавливаются со слегка падающими характеристиками вида 1 (рисунок 1). В современных высокоиспользованных машинах ввиду довольно сильного насыщения зубцов якоря влияние поперечной реакции якоря может быть настолько большим, что получить характеристику вида 1 (рисунок 1) невозможно. Тогда для получения такой характеристики на полюсах помещают слабую последовательную обмотку возбуждения согласного включения, намагничивающая сила которой составляет до 10% от намагничивающей силы параллельной обмотки возбуждения. При этом уменьшение Ф δ под воздействием поперечной реакции якоря частично или полностью компенсируется. Такую последовательную обмотку возбуждения называют стабилизирующей , а двигатель с такой обмоткой по-прежнему называется двигателем параллельного возбуждения.
Изменение скорости вращения Δn (рисунок 1) при переходе от холостого хода (I а = I а0) к номинальной нагрузке (I а = I ан) у двигателя параллельного возбуждения при работе на естественной характеристике мало и составляет 2 – 8% от n н. Такие слабо падающие характеристики называются жесткими. Двигатели параллельного возбуждения с жесткими характеристиками применяются в установках, в которых требуется, чтобы скорость вращения при изменении нагрузки сохранялась приблизительно постоянной (металлорежущие станки и прочее).
  |
| Рисунок 2. Механические и скоростные характеристики двигателя параллельного возбуждения при разных потоках возбуждения |
Регулирование скорости посредством ослабления магнитного потока
Регулирование скорости посредством ослабления магнитного потока производится обычно с помощью реостата в цепи возбуждения R р.в (смотрите рисунок 1, б в статье » » и рисунок 1 в статье «Пуск двигателей постоянного тока «). При отсутствии добавочного сопротивления в цепи якоря (R ра = 0) и U = const характеристики n = f (I а) и n = f (M ), определяемые равенствами (7) и (9), представленными в статье «Общие сведения о двигателях постоянного тока «, для разных значений R р.в, i в или Ф δ имеют вид, показанный на рисунке 2. Все характеристики n = f (I а) сходятся на оси абсцисс (n = 0) в общей точке при весьма большом токе I а, который, согласно выражению (5), представленному в статье «Общие сведения о двигателях постоянного тока «, равен
I а = U / R а.
Однако механические характеристики n = f (M ) пересекают ось абсцисс в разных точках.
Нижняя характеристика на рисунке 2 соответствует номинальному потоку. Значения n при установившемся режиме работы соответствуют точкам пересечения рассматриваемых характеристик с кривой M ст = f (n ) для рабочей машины, соединенной с двигателем (жирная штриховая линия на рисунке 2).
Точка холостого хода двигателя (M = M 0 , I а = I а0) лежит несколько правее оси ординат на рисунке 2. С увеличением скорости вращения n вследствие увеличения механических потерь M 0 и I а0 также увеличиваются (тонкая штриховая линия на рисунке 2).
Если в этом режиме с помощью приложенного извне момента вращения начать увеличивать скорость вращения n , то E а [смотрите выражение (6) в статье «Общие сведения о двигателях постоянного тока «] будет увеличиваться, а I а и M будут, согласно равенствам (5) и (8), представленным в статье «Общие сведения о двигателях постоянного тока «, уменьшаться. При I а = 0 и M = 0 механические и магнитные потери двигателя покрываются за счет подводимой к валу механической мощности, а при дальнейшем увеличении скорости I а и M изменят знак и двигатель перейдет в генераторный режим работы (участки характеристик на рисунке 2 левее оси ординат).
Двигатели общего применения допускают по условиям коммутации регулирование скорости ослаблением поля в пределах 1: 2. Изготавливаются также двигатели с регулированием скорости таким способом в пределах до 1: 5 или даже 1: 8, но в этом случае для ограничения максимального напряжения между коллекторными пластинами необходимо увеличить воздушный зазор, регулировать поток по отдельным группам полюсов (смотрите статью «Регулирование скорости вращения и устойчивость работы двигателей постоянного тока «) или применить компенсационную обмотку. Стоимость двигателя при этом увеличивается.
Регулирование скорости сопротивлением в цепи якоря, искусственные механическая и скоростная характеристики
Если последовательно в цепь якоря включить добавочное сопротивление R ра (рисунок 3, а ), то вместо выражений (7) и (9), представленных в статье «Общие сведения о двигателях постоянного тока «, получим
  | (1) |
  | (2) |
Сопротивление R ра может быть регулируемым и должно быть рассчитано на длительную работу. Цепь возбуждения должна быть включена на напряжение сети.
Рисунок 3. Схема регулирования скорости вращения двигателя параллельного возбуждения с помощью сопротивления в цепи якоря (а ) и соответствующие механические и скоростные характеристики (б )
Характеристики n = f (M ) и n = f (I а) для различных значений R ра = const при U = const и i в = const изображены на рисунке 3, б (R ра1
15.Характеристики двигателя параллельного возбуждения.
Электродвигателем параллельного возбуждения называется двигатель постоянного тока, обмотка возбуждения которого включена параллельно обмотке якоря (рис. 1). При снятии характеристик к цепи якоря подводится номинальное напряжение Uн=const.
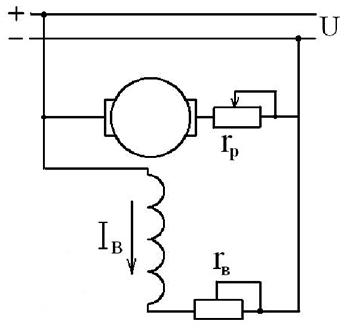
Рис. 1 — Схема двигателя параллельного возбуждения.
Ток, потребляемый двигателем из сети, определяется суммой I=Ia+Iв, ток возбуждения обычно равен Iв=(0,03. 0,04) Iн. Все характеристики двигателя снимаются при постоянных сопротивлениях в цепях возбуждения rв=const и якоря
Σr = const.
Скоростная характеристика.
Зависимость n=f (Ia) при Uн=const и Iв=const
Из уравнения ЭДС для электродвигателя
Имеем
 .
.
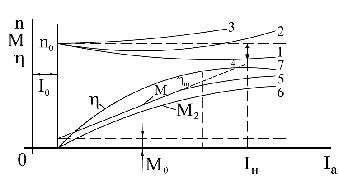 Рис. 2 — Характеристики двигателя параллельного возбуждения.
Рис. 2 — Характеристики двигателя параллельного возбуждения.
Моментная характеристика – это зависимость М=f (Ia) при rв=const, U=Uн и Σr=const. В установившемся режиме работы двигателя согласно
 .
.
имеем Mэм = M2+M0 = смIaФ. Если бы в процессе работы машины поток Ф не изменялся, то моментная характеристика представляла бы собой прямую (характеристика 4, рисунок 2). В действительности поток Ф с ростом тока Ia несколько уменьшается из-за размагничивающего действия реакции якоря, поэтому моментная характеристика слегка наклонена вниз (кривая 5). Характеристика полезного момента располагается ниже кривой электромагнитного момента на величину момента холостого хода (кривая 6).
Характеристика КПД η=f (Ia) снимается при U=Uн, rв=const, Σr=const и имеет типичный для электродвигателей вид (характеристика 7 на рис. 2). КПД быстро растет при увеличении нагрузки от холостого хода до 0,25Рн , достигает максимального значения при Р=(0,5. 0,75) Рн, а затем до Р=Рн остается почти неизменным. Обычно в двигателях малой мощности η=0,75. 0,85, а в двигателях средней и большой мощности η=0,85. 0,94.
Механическая характеристика представляет зависимость n=f (M) при U=Uн, Iв=const и Σr=const. Аналитическое выражение для механической характеристики можно получить из уравнения ЭДС электродвигателя
 .
.
Определив ток Iа из выражения М = сеIaФ и подставив это значение тока в выражение выше, получим
 .
.
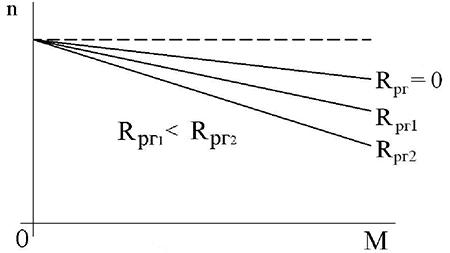
Рис. 3 — Механические характеристики двигателя параллельного возбуждения.
Следует помнить, что при обрыве цепи возбуждения Iв=0 обороты двигателя n→∞, т.е. двигатель идет «вразнос», поэтому его необходимо немедленно отключить от сети.
17.Характеристики двигателя смешанного возбуждения.
Принципиальная схема электродвигателя смешанного возбуждения приведена на рис. 1. В этом двигателе имеются две обмотки возбуждения – параллельная (шунтовая, ШО), подключенная параллельно цепи якоря, и последовательная (сериесная,СО), подключенная последовательно цепи якоря. Эти обмотки по магнитному потоку могут быть включены согласно или встречно.
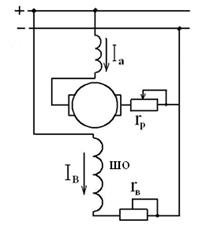 Рис. 1 — Схема электродвигателя смешанного возбуждения.
Рис. 1 — Схема электродвигателя смешанного возбуждения.
При согласном включении обмоток возбуждения их МДС складываются и результирующий поток Ф примерно равен сумме потоков, создаваемых обеими обмотками. При встречном включении результирующий поток равен разности потоков параллельной и последовательной обмоток. В соответствии с этим, свойства и характеристики электродвигателя смешанного возбуждения зависят от способа включения обмоток и от соотношения их МДС.
Скоростная характеристика n=f (Ia) при U=Uн и Iв=const (здесь Iв — ток в параллельной обмотке).
С увеличением нагрузки результирующий магнитный поток при согласном включении обмоток возрастает, но в меньшей степени, чем у двигателя последовательного возбуждения, поэтому скоростная характеристика в этом случае оказывается более мягкой, чем у двигателя параллельного возбуждения, но более жесткой, чем у двигателя последовательного возбуждения.
Соотношение между МДС обмоток может меняться в широких пределах. Двигатели со слабой последовательной обмоткой имеют слабо падающую скоростную характеристику (кривая 1, рис. 2).
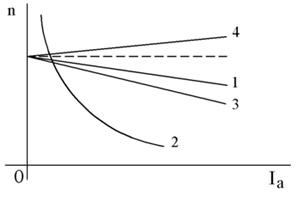 Рис. 2 — Скоростные характеристики двигателя смешанного возбуждения.
Рис. 2 — Скоростные характеристики двигателя смешанного возбуждения.
Чем больше доля последовательной обмотки в создании МДС, тем ближе скоростная характеристика приближается к характеристике двигателя последовательного возбуждения. На рис.2 линия 3 изображает одну из промежуточных характеристик двигателя смешанного возбуждения и для сравнения дана характеристика двигателя последовательного возбуждения (кривая 2).
При встречном включении последовательной обмотки с увеличением нагрузки результирующий магнитный поток уменьшается, что приводит к увеличению скорости двигателя (кривая 4). При такой скоростной характеристике работа двигателя может оказаться неустойчивой, т.к. поток последовательной обмотки может значительно уменьшить результирующий магнитный поток. Поэтому двигатели со встречным включением обмоток не применяются.
Механическая характеристика n=f (М) при U=Uн и Iв=const. двигателя смешанного возбуждения показана на рис.3 (линия 2).
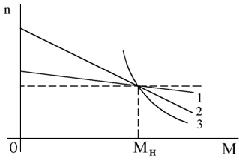
Рис. 3 — Механические характеристики двигателя смешанного возбуждения.
Она располагается между механическими характеристиками двигателей параллельного (кривая 1) и последовательного (кривая 3) возбуждения. Подбирая соответствующим образом МДС обеих обмоток, можно получить электродвигатель с характеристикой, близкой к характеристике двигателя параллельного или последовательного возбуждения.______
Двигатель параллельного возбуждения. Двигатель постоянного тока с параллельным возбуждением
Как и в случае генератора, обмотки индуктора и якоря двигателя могут быть соединены либо последовательно (рис.339), либо параллельно (рис.340). В первом случае двигатель называют двигателем с последовательным возбуждением (или сериесным двигателем), во втором – двигателем с параллельным возбуждением (или шунтовым двигателем). Применяются также двигатели со смешанным возбуждением (компаунд-двигатели), в которых часть обмоток индуктора соединена с якорем последовательно, а часть параллельно. Каждый из этих типов двигателей имеет свои особенности, делающие его применение целесообразным в одних случаях и нецелесообразным в других.
1. Двигатели с параллельным возбуждением. Схема включения в сеть двигателей этого типа показана на рис. 361. Так как здесь цепи якоря и индуктора не зависят друг от друга, то ток в них можно регулировать независимо при помощи отдельных реостатов, включенных в эти цепи. Реостат , включенный в цепь якоря, называют пусковым, а реостат , включенный в цепь индуктора, – регулировочным. При пуске в ход двигателя с параллельным возбуждением пусковой реостат должен быть обязательно полностью включен; по мере того как двигатель набирает частоту вращения, сопротивление реостата постепенно уменьшают и при достижении нормальной частоты вращения этот реостат выводится из цепи полностью. Двигатели с параллельным возбуждением, особенно значительной мощности, ни в коем случае нельзя включать без пускового реостата. Точно так же при выключении двигателя следует сначала постепенно ввести реостат и лишь после этого выключить рубильник, соединяющий двигатель с сетью.
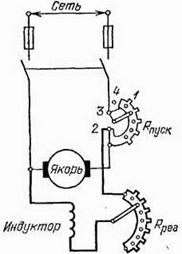
Рис. 361. Схема включения двигателя с параллельным возбуждением. Латунная дуга 1, по которой движется рычаг пускового реостата, через зажим 2 присоединена к концу регулировочного реостата, а через зажим 3 – к пусковому реостату. Это делается для того, чтобы при переводе пускового реостата на холостой контакт 4 и выключении тока цепь возбуждения не разрывалась
Нетрудно понять соображения, которыми вызваны эти правила включения и выключения двигателей. Мы видели (см. формулу (172.1)), что ток в якоре
 ,
,
где – напряжение сети, а — э. д. с., индуцированная в обмотках якоря. В первый момент, когда двигатель еще не успел раскрутиться и набрать достаточную частоту вращения, э. д. с. очень мала и ток через якорь приближенно равен
Сопротивление якоря обычно очень мало. Оно рассчитывается так, чтобы падение напряжения на якоре не превышало 5-10 % от напряжения сети, на которое рассчитан двигатель. Поэтому при отсутствии пускового реостата ток в первые секунды мог бы в 10-20 раз превысить нормальный ток, на который рассчитан двигатель при полной нагрузке, а это для него очень опасно. При введенном же пусковом реостате с сопротивлением пусковой ток через якорь
 . (173.1)
. (173.1)
Сопротивление пускового реостата подбирают так, чтобы пусковой ток превышал нормальный не больше чем в 1,5-2 раза.
Поясним сказанное числовым примером. Положим, что мы имеем двигатель мощности 1,2 кВт, рассчитанный на напряжение 120 В и имеющий сопротивление якоря . Ток через якорь при полной нагрузке
 .
.
Если бы мы включили этот двигатель в сеть без пускового реостата, то в первые секунды пусковой ток через якорь имел бы значение
 ,
,
в 10 раз превышающее нормальный рабочий ток в якоре. Если же мы хотим, чтобы пусковой ток превышал нормальный не больше, чем в 2 раза, т. е. был равен 20 А, то мы должны подобрать пусковое сопротивление таким, чтобы имело место равенство
Ясно также, что для шунтового двигателя очень опасна внезапная его остановка без выключения, например вследствие резкого возрастания нагрузки, так как при этом э. д. с. падает до нуля и ток в якоре возрастает настолько, что избыток выделяемого в нем джоулева тепла может привести к расплавлению изоляции или даже самих проводов обмотки (двигатель «перегорает»).
Регулировочный реостат , включенный в цепь индуктора, служит для того, чтобы изменять частоту вращения двигателя. Увеличивая или уменьшая сопротивление цепи индуктора с помощью этого реостата, мы изменяем ток в цепи индуктора, а тем самым и магнитное поле, в котором вращается якорь. Мы видели выше, что при заданной нагрузке двигателя ток в нем автоматически устанавливается такой, чтобы возникающий вращающий момент уравновешивал тормозящий вращающий момент, создаваемый нагрузкой двигателя. Это осуществляется благодаря тому, что индуцированная э. д. с. достигает соответствующего значения. Но индуцированная э. д. с. определяется, с одной стороны, магнитной индукцией, а с другой, – частотой вращения якоря.
Чем больше магнитный поток индуктора, тем меньше должна быть частота вращения двигателя, чтобы получить определенное значение э. д. с., и, наоборот, чем слабее магнитный поток, тем больше должна быть частота вращения. Поэтому, для того чтобы при заданной нагрузке увеличить частоту вращения шунтового двигателя, нужно ослабить магнитный поток в индукторе, т. е. ввести большее сопротивление в цепь индуктора при помощи регулировочного реостата. Напротив, чтобы уменьшить частоту вращения шунтового двигателя, нужно увеличить магнитный поток в индукторе, т. е. уменьшить сопротивление в цепи индуктора, выводя регулировочный реостат.
С помощью регулировочного реостата можно при нормальном напряжении и отсутствии нагрузки установить нормальную частоту вращения двигателя. При возрастании нагрузки ток в якоре должен возрастать, а индуцированная в нем э. д. с. – уменьшаться. Это происходит вследствие некоторого уменьшения частоты вращения якоря. Однако уменьшение частоты вращения, обусловленное возрастанием нагрузки от нуля до нормальной мощности двигателя, обычно очень незначительно и не превышает 5-10 % от нормальной частоты вращения двигателя. Это обусловлено главным образом тем, что в двигателях с параллельным возбуждением ток в индукторе не изменяется при изменении тока в якоре. Если бы при изменениях нагрузки мы хотели поддерживать прежнюю частоту вращения, то это можно было бы осуществить, несколько изменяя с помощью регулировочного реостата ток в цепи индуктора.
Таким образом, с эксплуатационной точки зрения двигатели постоянного тока с параллельным возбуждением (шунтовые двигатели) характеризуются следующими двумя свойствами: а) частота их вращения при изменении нагрузки остается почти постоянной; б) частоту их вращения можно в широких пределах изменять с помощью регулировочного реостата. Поэтому такие двигатели довольно широко применяются в промышленности там, где обе указанные их особенности имеют значение, например для приведения в действие токарных и других станков, частота вращения которых не должна сильно зависеть от нагрузки.
173.1. На рис. 362 показана схема шунтового двигателя с так называемым комбинированным пуско-регулировочным реостатом. Разберитесь в этой схеме и объясните, какую роль играют отдельные части этого реостата.
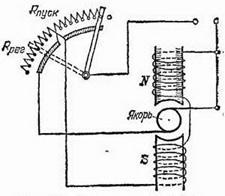
Рис. 362. К упражнению 173.1
173.2. Нужно пустить в ход шунтовый двигатель. Для этого даны два реостата: один из толстой проволоки с малым сопротивлением, другой из тонкой проволоки с большим сопротивлением. Какой из этих реостатов следует включить как пусковой и какой как регулировочный? Почему?
2. Двигатели с последовательным возбуждением. Схема включения в сеть этих двигателей показана на рис. 363. Здесь ток якоря является в то же время и током индуктора, и потому пусковой реостат изменяет и ток в якоре, и ток в индукторе. При холостом ходе или очень малых нагрузках ток в якоре, как мы знаем, должен быть очень мал, т. е. индуцированная э. д. с. должна быть почти равна напряжению сети. Но при очень малом токе через якорь и индуктор слабо и поле индуктора. Поэтому при малой нагрузке необходимая э. д. с. может быть получена только за счет очень большой частоты вращения двигателя. Вследствие этого при очень малых токах (малой нагрузке) частота вращения двигателя с последовательным возбуждением становится настолько большой, что это может стать опасным с точки зрения механической прочности двигателя.
![]()
![]()
Рис. 363. Схема включения двигателя с последовательным возбуждением
Говорят, что двигатель идет «вразнос». Это недопустимо, и поэтому двигатели с последовательным возбуждением нельзя пускать в ход без нагрузки или с малой нагрузкой (меньшей 20-25 % от нормальной мощности двигателя). По этой же причине не рекомендуется соединять эти двигатели со станками или другими машинами ременными или канатными передачами, так как обрыв или случайный сброс ремня приведет к «разносу» двигателя. Таким образом, в двигателях с последовательным возбуждением при возрастании нагрузки увеличиваются ток в якоре и магнитное поле индуктора; поэтому частота вращения двигателя резко падает, а развиваемый им вращающий момент резко возрастает.
Эти свойства двигателей с последовательным возбуждением делают их наиболее удобными для применения на транспорте (трамваи, троллейбусы, электропоезда) и в подъемных устройствах (кранах), так как в этих случаях необходимо иметь в момент пуска при очень большой нагрузке большие вращающие моменты при малых частотах вращения, а при меньших нагрузках (на нормальном ходу) меньшие моменты и большие частоты.
Регулирование частоты вращения двигателя с последовательным возбуждением производится обычно регулировочным реостатом, включенным, параллельно обмоткам индуктора (рис. 364). Чем меньше сопротивление этого реостата, тем большая часть тока якоря ответвляется в него и тем меньший ток идет через обмотки индуктора. Но при уменьшении тока в индукторе частота вращения двигателя возрастает, а при его увеличении падает. Поэтому, в отличие от того, что имело место для шунтового двигателя, для того чтобы увеличить частоту вращения сериесного двигателя, нужно уменьшить сопротивление цепи индуктора, выводя регулировочный реостат. Для того чтобы уменьшить частоту вращения сериесного двигателя, нужно увеличить сопротивление цепи индуктора, вводя регулировочный реостат.
![]()
![]()
Рис. 364. Схема включения реостата для регулирования частоты вращения сериесного двигателя
173.3. Объясните, почему сериесный двигатель нельзя пускать вхолостую или с малой нагрузкой, а шунтовый можно.
Таблица 8. Преимущества, недостатки и области применения двигателей различных типов