Гибридные двигатели
Гибридные двигатели
Гибридные двигатели являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 град.). Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рис. 1).
 Рис. 1. Гибридный двигатель
Рис. 1. Гибридный двигатель
Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
S = 360/(Nph*Ph) = 360/N,
где Nph – чило эквивалентных полюсов на фазу = число полюсов ротора,
Ph – число фаз,
N — полное количество полюсов для всех фаз вместе.
Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град. Продольное сечение гибридного шагового двигателя показано на рис. 2. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
 Рис. 2. Продольный разрез гибридного шагового двигателя
Рис. 2. Продольный разрез гибридного шагового двигателя
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубъев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая – типично 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться с осторожностью.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита . При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Большинство современных шаговых двигателей являются гибридными. По сути гибридный двигатель является двигателем с постоянными магнитами, но с большим числом полюсов. По способу управления такие двигатели одинаковы, дальше будут рассматриваться только такие двигатели. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно шаг равен 3.6 грд или 1.8 грд. Большинство контроллеров позволяют работать в полушаговом режиме, где этот угол вдвое меньше, а некоторые контроллеры обеспечивают микрошаговый режим.
Подпишитесь на наши новости
Получайте первыми актуальную информацию от ООО «Электропривод»
Гибридный шаговый двигатель с энкодером 86HSE8N-BC38 и драйвером HSS86


Добавить в избранное
- Наличными
- Наложенный платеж «Нова Пошта»
- Самовывоз
- Доставка «Нова Пошта»
- Уточняйте у продавца

- Обзор
- Описание
Описание Гибридный шаговый двигатель с энкодером 86HSE8N-BC38 и драйвером HSS86
Гибридный шаговый двигатель с энкодером, замкнутого типа NEMA34 86HSE8N-B38 с гибридным серводрайвером HSS86 – 2х фазный двигатель с энкодером, работает плавно с очень низким уровнем шума и нагреванием.
Главной особенностью двигателя 86HSE8N-BC38 есть быстрая реакция и отсутствия рысканий (неравномерной работы). Шаговые двигатели с энкодером работают без потери шагов по сравнению с обычными шаговыми двигателями не замкнутого типа. Он идеально подходит для использования механизмов с ременным приводом либо механизмов низкой жесткости. Максимальная эффективная работа двигателя с энкодером обеспечивается совместным использованием с гибридными серводрайвером HSS86.
Технические характеристики ГШГ 86HSE8N-BC38 :
| Тип двигателя | 2х-фазный ШД |
| Ток фазы | 6 А |
| Диаметр вала | 14 мм |
| Максимально крутящий момент | 8 N.m |
| Угол шага | 1,8 ° (точность: ± 5%) |
| Максимальная температура | 80ºС |
| Рабочий диапазон температур | от -20ºС до +50ºС |
| Разрешение энкодера | 1000 PRR |
| Длина мотора | 118 мм |
| Метод охлаждения | Естественное охлаждение или использование внешнего радиатора |
| Вес | 4 кг |

Драйвер шагового двигателя HSS86 с энкодером— 2-х фазный драйвер для управления шагового двигателя с энкодером. Драйвер обеспечивает стабильную и точную работу двигателя без потери шагов. Драйвер разработанный на 32-битной технологии DSP, поддерживает управления сигналами PUL/DIR (CP/CW).
Более подробно с характеристикой драйвера HSS86 вы можете нажав на эту ссылку

Двигатель также можно подключать к обычному драйверу, без подключения энкодера, в этом случае он будет работать без точного контроля положения ротора.
Шаговые двигатели с энкодером широко применяются для станков с ЧПУ, гравировальных станках, лазерной резке.
Наши цены довольно демократичны и всегда остаются одними из самых низких по Украине, поэтому и сотрудничество с нашей компанией — наиболее оптимально для всех, кто занимается обработкой материалов на ЧПУ.
Позвоните или заполните заявку и мы в самые короткие сроки проконсультируем Вас по ассортименту, ценам и доставке.
Многофазный шаговый двигатель гибридного типа Советский патент 1988 года по МПК H02K37/04
Описание патента на изобретение SU1426477A3
|)аковин 4а и 4, наружных полурако- )рин 7ft и 7«Г, Обмотка 2, постоянный йагнит 6 и каркас 3 составляют ста- jrop электродвигателя. Ротор двига- |геля содержит постоянный магнит 9 и Полюсные наконечники в виде полураке- ;рин 5а и 5ь, Юч и . Все части об
мотки 2 благодаря круглому сечению обмотки и полураковин окружены железом, т.е. активны, причем железо находится в самой непосредственной близости к меди обмотки, что повышает эффективность ее использования. Зз.п. ф-лы, 3 ил.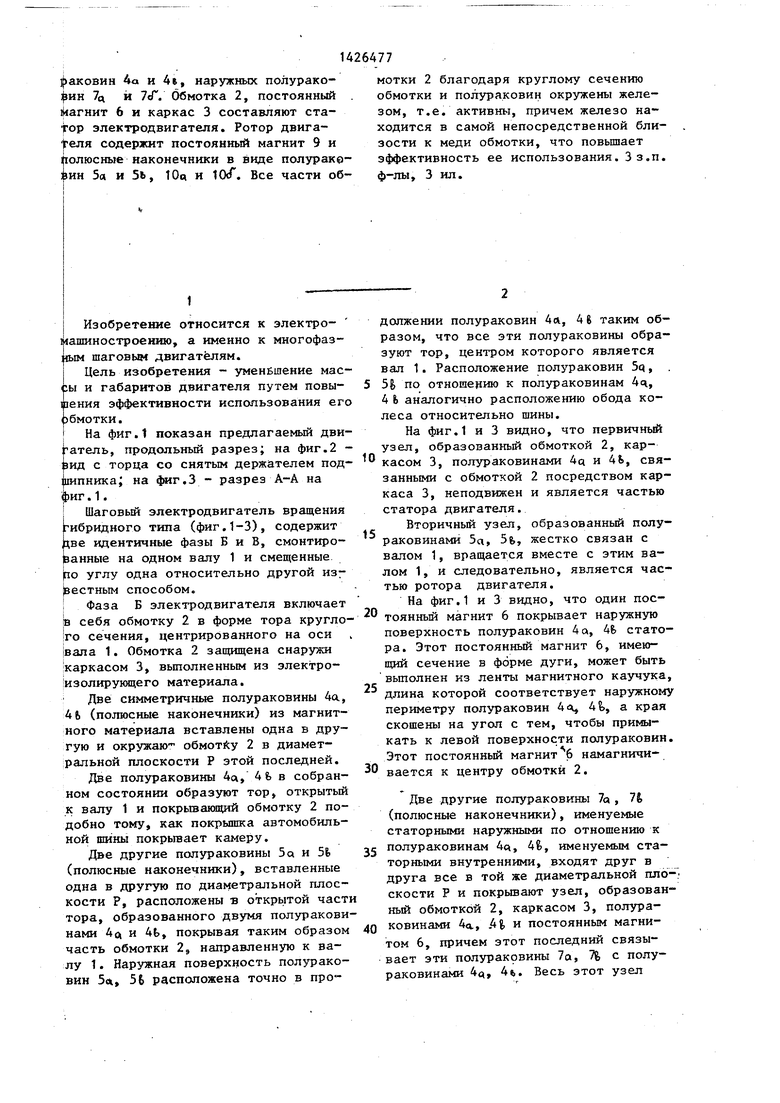
Похожие патенты SU1426477A3
Иллюстрации к изобретению SU 1 426 477 A3
Реферат патента 1988 года Многофазный шаговый двигатель гибридного типа
Изобретение относится к электромашиностроению, а именно к многофазным шаговым двигателям. Цель изобретения — уменьшение массы и габаритов двигателя путем повышения эффективности использования его обмотки. Каждая фаза двигателя имеет обмотку 2 в форме тора круглого сечения, центрированного на оси вала 1. Полюсные наконечники в виде симметричных вставленных одна в другую внутренних полу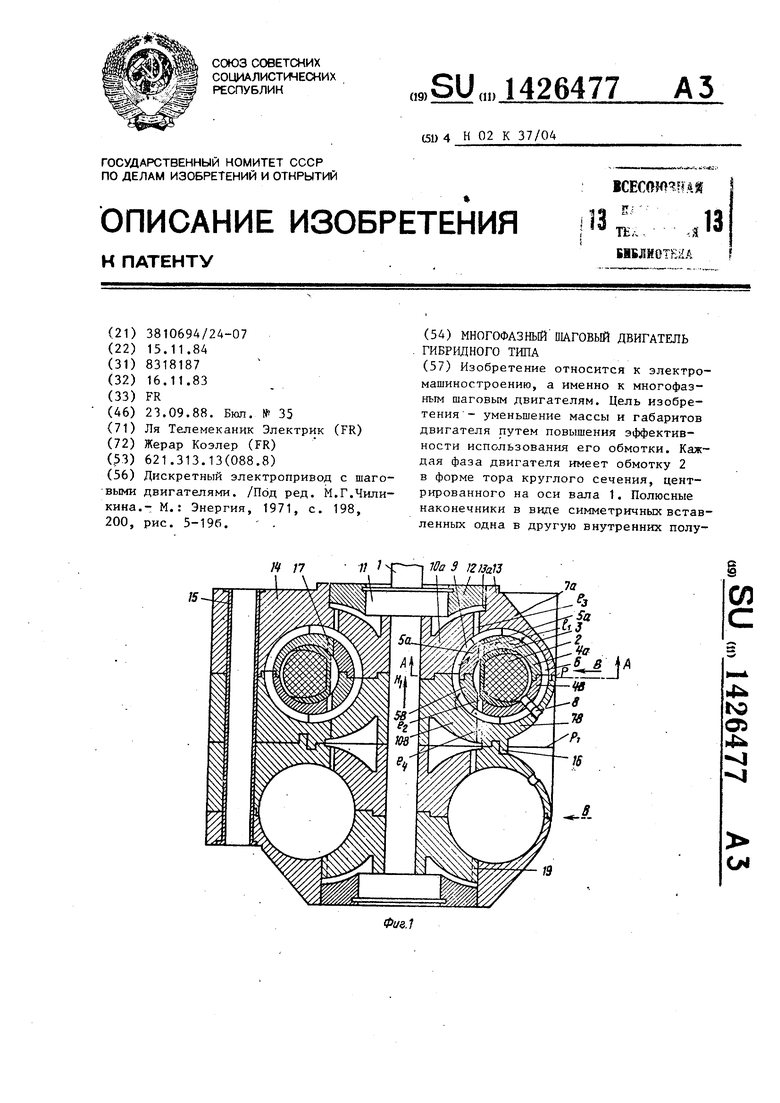
Формула изобретения SU 1 426 477 A3
Изобретение относится к электромашиностроению, а именно к многофазным шаговым двигателям.
Цель изобретения — уменьшение массы и габаритов двигателя путем повышения эффективности использования его обмотки.
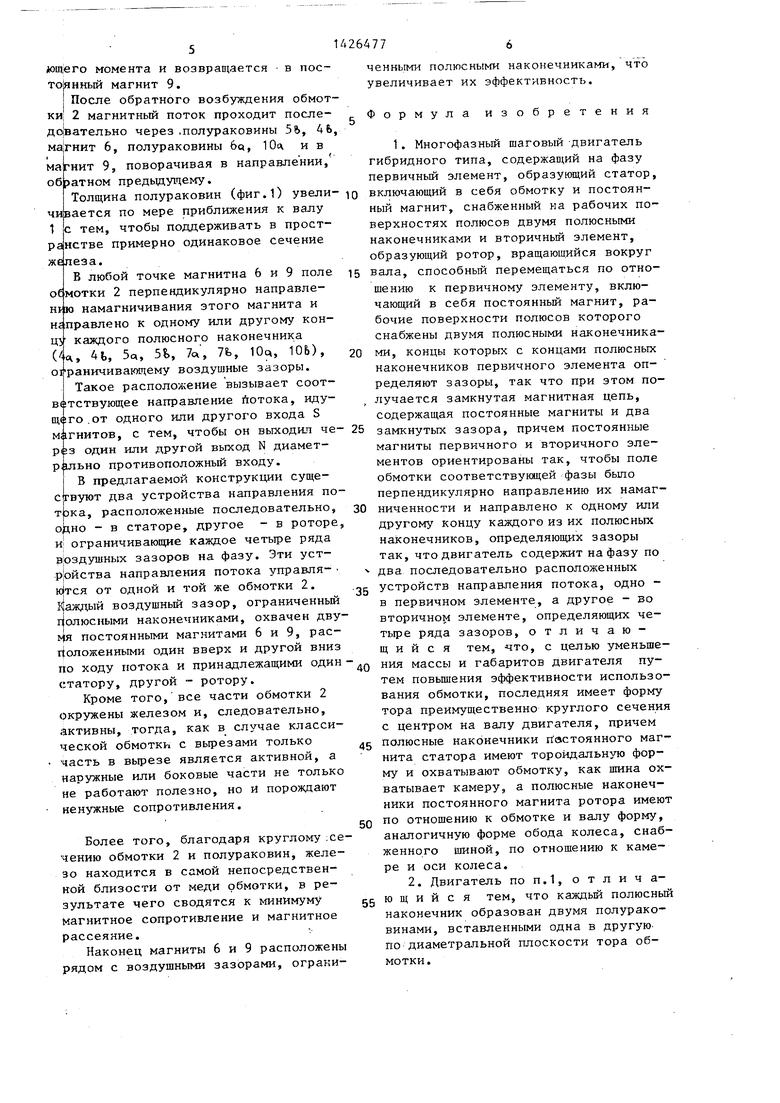
I На фиг.1 показан предлагаемый двигатель, продольный разрез; на фиг.2 — РИД с торца со снятым держателем под- |ципника; на фиг.З — разрез А-А на фиг.1.
Шаговый электродвигатель вращения гибридного типа (фиг.1-3), содержит две идентичные фазы Б и В, смонтиро- )ванные на одном валу 1 и смещенные |по углу одна относительно другой из- |вестным способом.
I Фаза Б электродвигателя включает р себя обмотку 2 в форме тора кругло- |го сечения, центрированного на оси |вала 1. Обмотка 2 защищена снаружи ;каркасом 3, выполненным из электролиз олирующе го материала.
Две симметричные полураковины 4а., 4 Ь (полюсные наконечники) из магнитного материала вставлены одна в другую и окружаю- обмотЛу 2 в диаметральной плоскости Р этой последней.
Две полураковины 4я, 4 Ь в собранном состоянии образуют тор, открытый к валу 1 и покрьгаакядий обмотку 2 подобно тому, как покрышка автомобильной шины покрьгоает камеру.
Две другие полураковины 5а и 5Ь (полюсные наконечники), вставленные одна в другую по диаметральной плоскости Р, расположены в открытой части тора, образованного двумя полураковинами 4о| и 4Ь, покрывая таким образом часть обмотки 2, направленную к валу 1. Наружная поверхность полураковин 5, 56 расположена точно в про
должении полураковин 4А, 4 В таким образом, что все эти полураковины образуют тор, центром которого является вал 1. Расположение полураковин 5q,
5fe по отношению к полураковинам 4ц, 4 Ь аналогично расположению обода колеса относительно шины.
На фиг.1 и 3 видно, что первичный узел, образованный обмоткой 2, каркасом 3, полураковинами 4а и 4Ь, связанными с обмоткой 2 посредством каркаса 3, неподвижен и является частью статора двигателя.
Вторичный узел, образованный полураковинами 5а, 5fe, жестко связан с валом 1, вращается вместе с этим валом 1, и следовательно, является частью ротора двигателя.
На фиг.1 и 3 видно, что один постоянный магнит 6 покрывает наружную поверхность полураковин 4 а, 4Ь статора. Этот постоянный магнит 6, имеющий сечение в форме дуги, может быть вьтолнен из ленты магнитного каучука, длина которой соответствует наружному периметру полураковин , 4, а края скошены на угол с тем, чтобы примыкать к левой поверхности полураковин. Этот постоянньй магнит 6 намагничи-
вается к центру обмотки 2.
Две другие полураковины , 7& (полюсные наконечники), именуемые статорными наружными по отношению к
полураковинам 4й, 4fe, именуемым ста- торными внутренними, входят друг в друга все в той же диаметральной пло-/ скости Р и покрывают узел, образованный обмоткой 2, каркасом 3, полураковинами 4а., -4Ь и постоянньм магнитом 6, причем этот последний связывает эти полураковины 7а, 7, с полураковинами 4а 4(,. Весь этот узел
представляет собой статор фазы Б электродвигателя.
Отверстие 8, выполненное в полураковинах 76 и 46 и в магните 6, позволяет вывести из двигателя концы провода (не показаны) обмотки 2,
Постоянньш магнит 9 также установлен на поверхности полура;совин. 5а, 5Ь именуемых роторными, обращенной к валу 1. Этот магнит 9 также выполнен из ленты магнитного каучука и намагничен, как и магнит 6, к центру обмотки 2.
Две другие полураковины Юц, lOj, (полюсные наконечники), именуемые роторными внутренними по отношению к роторным н аружным полураковинам 5а 5Ь, вставлены друг в друга также в диаметральной плоскости Р и покрывают узел, образованный магнитом 9 и полураковинами 5а, 5fe, причем магнит 9 соединяет эти последние с полураковинами Юа, 10%.
Через полураковины Юо, lOg прохо дит центральное отверстие, в которое вставлен вал 1 двигателя.
Вал 1 смонтирован в подшипниках 11, периферийная поверхность которых вставлена в кольцо 12 из немагнитног материала. Кольцо вставлено в полость, вьшолненную в осевом кольцево выступе 13 на полураковине 1л.
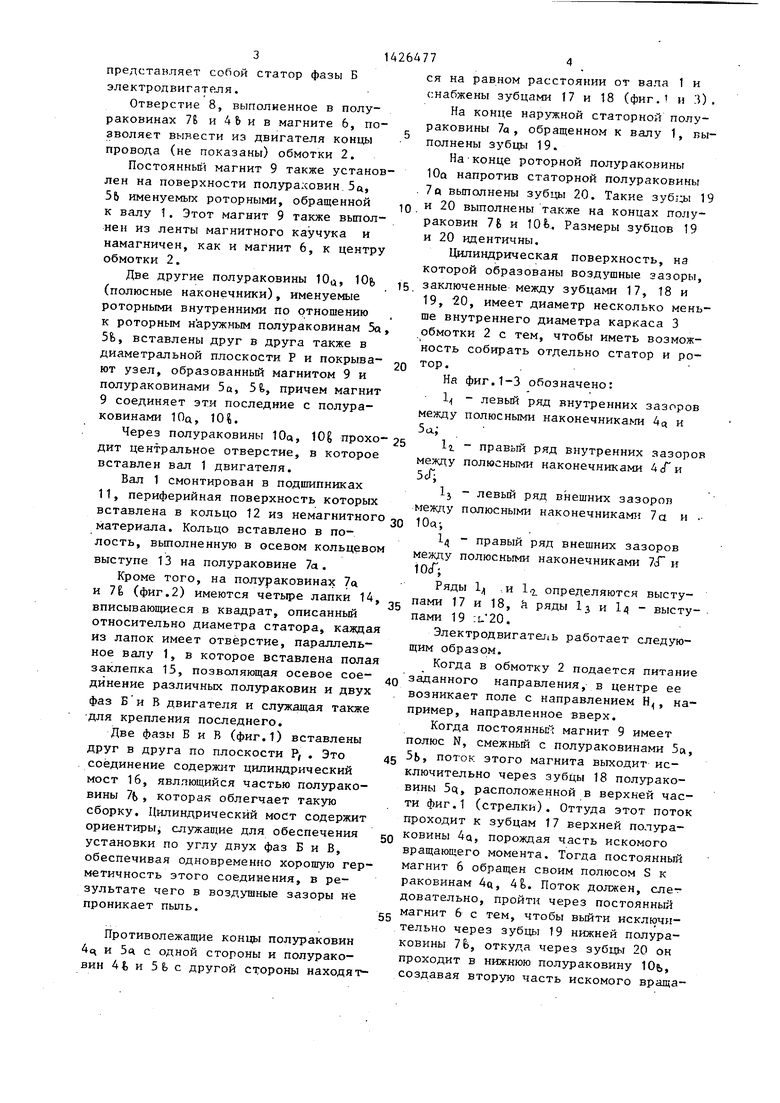
Кроме того, на полураковинах 7а и 7& (фиг,2) имеются четыре лапки 14
вписывающиеся в квадрат, описанный относительно диаметра статора, каждая из лапок имеет отверстие, параллельное валу 1, в которое вставлена полая заклепка 15, позволяющая осевое соединение различных полураковин и двух фаз Б и В двигателя и служащая также для крепления последнего.
Две фазы Б и В (фиг.1) вставлены друг в друга по плоскости Р . Это соединение содержит цилиндрический мост 16, являющийся частью полурако- вины 1) , которая облегчает такую сборку. Цилиндрический мост содержит ориентиры, служащие для обеспечения установки по углу двух фаз Б и В, обеспечивая одновременно хорошую герметичность этого соединения, в результате чего в воздушные зазоры не проникает пыпь.
Противолежащие концы полураковин 4ц и 5|Я с одной стороны и полурако- вин 4| и 5Ь с другой стороны находя-г10
ся на равном расстоянии от вала 1 и снабжены зубцами 17 и 18 (фиг.1 и 3).
На конце наружной статорной полураковины 7а , обращенном к валу 1, выполнены зубцы 19.
На конце роторной полураковины Юа напротив статорной полураковины 7и выполнены зубцы 20. Такие зуб;да 19 и 20 выполнены также на концах полураковин 78 и 10fe. Размеры зубцов 19 и 20 идентичны.
Цилиндрическая поверхность, на которой образованы воздушные зазоры, 15, заключенные между зубцами 17, 18 и 19, 20, имеет диаметр несколько меньше внутреннего диаметра каркаса 3 обмотки 2 с тем, чтобы иметь возможность собирать отдельно статор и ротор.
На фиг.1-3 обозначено:
l — левый ряд внутренних зазоров между полюсными наконечниками 4ci и 5ai
1г — правый ряд внутренних зазоров между полюсными наконечниками
Ij — левый ряд внещних зазороп между полюсными наконечниками 7а и Юя;
1 правый ряд внешних зазоров между полюсными наконечниками 7сГ и ЮсГ;
Ряды 1 -И IT. определяются выступами 17 и 18, k ряды 1з и 1 — выступами 19 :i- 20.
ЭлектродвигaтeJlЬ работает следующим образом.
Когда в обмотку 2 подается питание заданного направления, в центре ее возникает поле с направлением Н, например, направленное вверх.
Когда постоянньсЧ магнит 9 имеет полюс N, смежный с полураковинами 5й, 5ь, поток этого магнита выходит исключительно через зубцы 18 полураковины Sq, расположенной в верхней части фиг.1 (стрелки). Оттуда этот поток проходит к зубцам 17 верхней полураковины 4а, порождая часть искомого вращающего момента. Тогда постоянный магнит 6 обращен своим полюсом S к раковинам AQ, 4). Поток должен, следовательно, пройти через постоянный магнит 6 с тем, чтобы выйти исключительно через зубцы 19 нижней полураковины 1Ь, откуда через зубцы 20 он проходит в нижнюю полураковину 10ь, создавая вторую часть искомого вршца35
joinero момента и возвращается в пос- тойнный магнит 9.
I После обратного возбуждения обмотки; 2 магнитный поток проходит после- до;вательно через .полураковины 5Ь, 46, ма|гнит 6, полураковины 6я, 10( ив магнит 9, поворачивая в направлении, обратном предьщу1цему.
Толщина полураковин (фиг.1) увеличивается по мере приближения к валу 1 с тем, чтобы поддерживать в простра
нстве примерно одинаковое сечение
В любой точке магнитна 6 и 9 поле оСмотки 2 перпендикулярно направленно намагничивания этого магнита и направлено к одному или другому кон- вд каждого полюсного наконечника (с, 4<„ 5а, 5Ь, , 7Ь, Юс, 10Ь), О1 раничивающему воздушные зазоры.
Такое расположение вызывает соответствующее направление Лотока, идущего, от одного или другого входа S м;
гнитов, с тем, чтобы он выходил че один или другой выход N диамет- р.шьно противоположный входу.
в предлагаемой конструкции существуют два устройства направления по тэка, расположенные последовательно, — в статоре, другое — в роторе и ограничивающие каждое четьфе ряда вЬздушных зазоров на фазу. Эти уст- рЬйства направления потока управля- к|тся от одной и той же обмотки 2. В|аждый воздушный зазор, ограниченный г:|олюсными наконечниками, охвачен дву Ня постоянными магнитами 6 и 9, расположенными один вверх и другой вниз по ходу потока и принадлежащими один статору, другой — ротору.
Кроме того, все части обмотки 2 окружены железом и, следовательно, активны, тогда, как в случае классической обмоткк с вьфезами только часть в вьфезе является активной, а наружные или боковые части не только не работают полезно, но и порождают ненужные сопротивления.
Более того, благодаря круглому ;се- чению обмотки 2 и полураковин, железо находится в самой непосредственной близости от меди обмотки, в результате чего сводятся к минимуму магнитное сопротивление и магнитное рассеяние.
Наконец магниты 6 и 9 расположены рядом с воздушными зазорами, ограниченными полюсными наконечниками, увеличивает их эффективность.
1. Многофазный шаговый -двигатель гибридного типа, coдepжaD ий на фазу первичный элемент, образующий статор, включающий в себя обмотку и постоянный магнит, снабженный на рабочих поверхностях полюсов двумя полюсными наконечниками и вторичный элемент, образующий ротор, вращаюшийся вокруг вала, способньй перемещаться по отношению к первичному элементу, включающий в себя постоянньй магнит, рабочие поверхности полюсов которого снабжены двумя полюсными наконечниками, концы которых с концами полюсных наконечников первичного элемента определяют зазоры, так что при этом получается замкнутая магнитная цепь, содержащая постоянные магниты и два замкнутых зазора, причем постоянные магниты первичного и вторичного элементов ориентированы так, чтобы поле обмотки соответствугацей фазы бьшо перпендикулярно направлению их намагниченности и направлено к одному или другому концу каждого из их полюсных наконечников, определяющих зазоры
так, что двигатель содержит на фазу по два последовательно расположенных устройств направления потока, одно в первичном элементе, а другое — во вторичном элементе, определяющих четьфе ряда зазоров, отличающийся тем, что, с целью уменьшения массы и габаритов двигателя путем повьшения эффективности использования обмотки, последняя имеет форму тора преимущественно круглого сечения с центром на валу двигателя, причем полюсные наконечники гостоянного магнита статора имеют тороидальную форму и охватывают обмотку, как шина охватывает камеру, а полюсные наконечники постоянного магнита ротора имеют по отношению к обмотке и валу форму, аналогичную форме обода колеса, снабженного шиной, по отношению к камере и оси колеса.
2. Двигатель поп.1, отличающийся тем, что каждьй полюсный наконечник образован двумя полурако- винами, вставленными одна в другую- по диаметральной плоскости тора обмотки. 3.Двигатель по п.2, отличающийся ,тем, что внешний диаметр полюсов наконечников магнитов ротора меньше внутреннего диаметра тора об- мотки, при этом обмотка снабжена изо- лирующим защитным каркасом. 4.Двигатель по Ш1.2 и 3, отличающийся тем, что две внешние 10 полураковины полюсных наконечников
постоянного магнита статора, принадлежащие к двум разным фазам, снабжены каждая цилиндрическим выступом для обеспечения правильной сборки этих двух фаз, а две другие внешние полураковины этих наконечников, принадлежащие двум фазам, имеют калздая осевую цилиндрическую поверхность, в которой размещено немагнитное кольцо, несущее подшипник, который насажен на вал.
Фиг.З
Мой переход с Lerdge на Marlin
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Статья относится к принтерам:
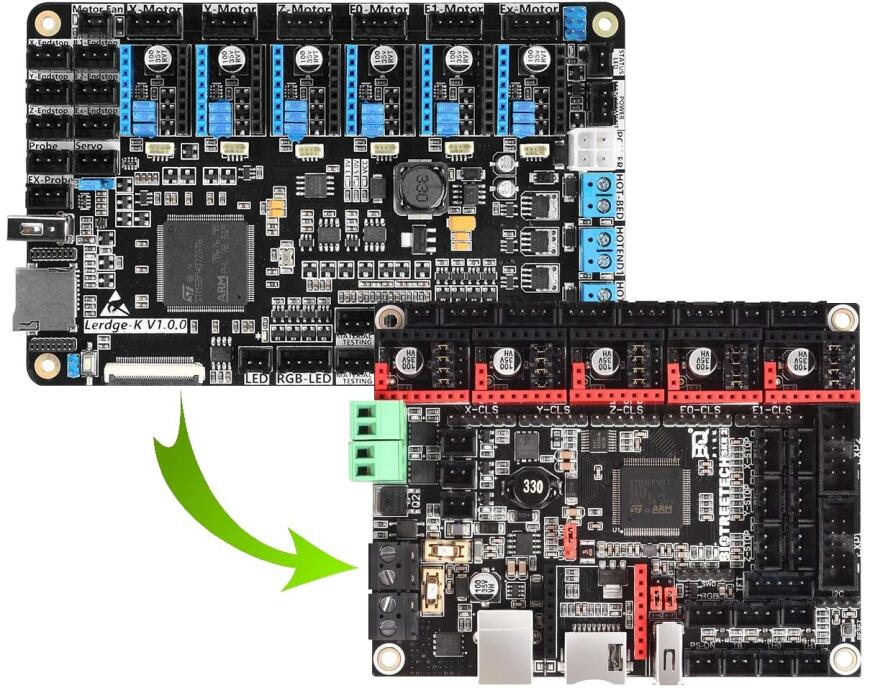
- Сама плата SKR 2 ревизии «B» от Bigtreetech;
- Пять драйверов TMC2209 от Bigtreetech;
- Экран TFT43 от Bigtreetech;
- Блок автоматического выключения от всё той же Bigtreetech;
- Удлинитель для micro SD-карты;
- Модуль Wi-Fi ESP-01S для экрана;
- Модуль Wi-Fi ESP-07S с внешней антенной для SKR 2;
- Mini UPS на 12 вольт;
- Датчик окончания филамента (шёл в нагрузку с одним из заказов).
– Вручить шашку Игорю Владимировичу, а? Любо?
– Простите, а Люба — это кто?
((с) к/ф «День выборов»)
Что понравилось при ознакомлении с ТТХ и беглом осмотре полученного комплекта:
- Поддержка платой управления не только micro SD-карт, но и USB-флешек.
- Наличие у драйверов достаточно большой не окрашенной металлизированной площадки для установки на неё радиатора.


- Возможность работы экрана в двух режимах, один из которых – режим эмуляции дисплея 12864.
- Автоматическое уменьшение яркости экрана при его простое. При этом уровень, до которого уменьшается яркость, также как и интервал, через который она будет уменьшена, настраивается достаточно гибко.
- Возможность непосредственно с экрана отправлять на плату управления команды в виде G-кода, и выводить ответ на них на всё тот же экран.
Ну, с Богом, Параска.
Т.к. раньше с Марлином я знаком не был, и даже не знал с какого бока к нему подступиться, я сделал некое подобие стенда.

На нём я и оттачивал настройку прошивки под свои нужды. Увы, легко и без проблем Марлин мне не дался. После Лерджа несколько сложновато давался алгоритм настройки. Не зря говорят, что переучиваться сложнее, чем учиться с нуля. Нужно привыкать и приспосабливаться к немного другой логике работы. Взять хотя бы, например, управляемые разъёмы вентиляторов на плате SKR 2 – Fan0, Fan1 и Fan2. Что за что отвечает? На плате присутствует поддержка двух экструдеров E0 и E1. Соответственно, в эти разъёмы должны подключаться вентиляторы обдува детали, и обдува радиаторов этих двух экструдеров. Если следовать некой логике, то Fan0 – это разъём для вентилятора обдува радиатора экструдера E0, Fan 1 – для вентилятора обдува радиатора экструдера E1, ну и оставшийся Fan2 – для обдува детали. Так думал я, а Марлин думал иначе. Для обдува детали в прошивке где-то глубоко в коде прописан Fan0, а вот для обдува радиаторов экструдеров вентиляторы не прописаны вообще. Вероятно, предполагается, что они подключаются к неуправляемым разъёмам для вентиляторов, которые на плате тоже есть (Fan3, Fan4). Поэтому, если вы хотите иметь управляемые вентиляторы обдува радиатора, то их нужно прописать вручную. Ещё момент – если у Лердж не имеет значения, какой датчик автоуровня подключён к плате (плёночный, BL-Touch, индукционный), и его можно поменять без перепрошивки, то в Марлине нужно чётко указать, какой тип датчика подключён к плате. И без изменения этой информации в прошивке (с последующей перекомпиляцией оной и перепрошивкой платы управления) его не поменять. Ну и волшебный Z-offcet. Если у Лердж он работает сразу и всегда – внесли в него изменения (как в соответствующем меню, так и при печати с помощью подстройки), и они применяются ко всем печатям, которые вы будете проводить после этих изменений, без лишних телодвижений, то у Марлина это не так. После того, как вы внесли изменения в Z-offcet и сохранили их в EEPROM, вам, при каждой печати после автоматической парковки по G28, надо вызывать их из памяти командой M420 S1, иначе значения Z-offcet не будут использоваться. Это же верно и для карты стола. Вот этот маленький нюанс знатно попил моей крови. Но, вроде как у Марлина датчик автоуровня BL-Touch работает стабильнее и адекватнее, чем у Лердж. Сам же я работу BL-Touch не проверял, не смотря на то, что его клон (3D-Touch) от Trianglelab у меня есть. Мне просто лень его ставить, т.к. я один раз снял карту стола плёночным датчиком и печатаю дальше без перекалибровки, вызывая карту всё той же командой M420 S1, упомянутой выше. Вместе с тем сама автокалибровка стола со снятием карты с помощью BL-Touch или любого иного датчика в Марлине проходит более предсказуемо, особенно если сравнивать с работой Lerdge с прошивкой версии 4.3.3 beta 1-3. Про финальную версию прошивки Lerdge 4.3.3 я ничего сказать не могу, т.к. подзабросил наблюдение за ней. Опытные марлиноводы и марлиноведы скажут, что упомянутые выше проблемы – это пустяки, и не стоит из-за них нервничать. Но как новичок отвечу – что для вас пустяк, для новичка проблема, и, к сожалению, её не всегда получается быстро решить. Однако продолжу рассказывать дальше.
Итак, используя сделанный стенд, я произвёл в марлине настройку основных параметров принтера, таких как габариты печатного поля, управление блоком автоматического выключения питания, настройку отключения вентиляторов обдува радиатора хотенда, при охлаждении его ниже 40 градусов и т.п. И при этой настройке я был очень рад, что экран может выступать как хост по отправке команд на плату и получать от неё ответы. Это знатно экономит время и позволяет не подключать плату к компьютеру только для того, чтобы, например, опросить состояние концевиков командой M119, или проверить, адекватно ли работает блок автоматического выключения питания, отправив команду M81 на плату. Но более подробно к некоторым настройкам Марлина я вернусь немного позже.
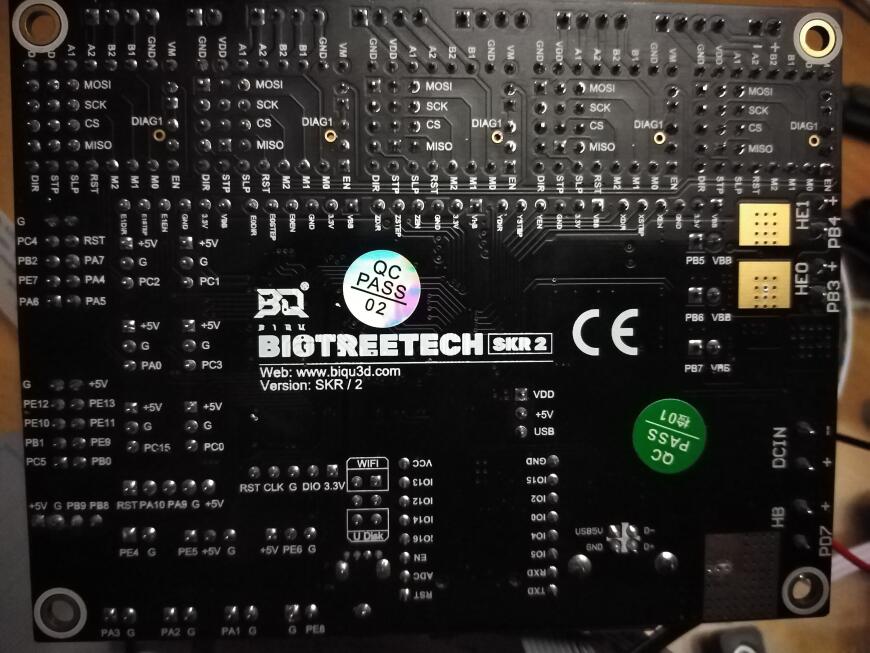
А сейчас коротко пробегусь по подключению электронной части принтера к новой плате. Тут проблем не возникло от слова совсем. У Bigtreetech, как и у Лердж, есть достаточно подробная инструкция о том, что, как и куда подключать, а также есть полная карта распиновки разъёмов. Ну и на обратной стороне платы также есть подписи ко всем пинам.
 Единственное что пришлось сделать, так это удлинить некоторые провода, т.к. они были рассчитаны под расположение разъёмов на Lerdge-K. Также пришлось смоделировать и напечатать новый корпус для экрана TFT43. На этот корпус я, помимо родных разъёмов для USB-флешки и SD-карты, расположенных на плате экрана, вывел с помощью удлинителей разъёмы для подключения micro SD-карты и USB-флешки с самой платы SKR (у неё он есть, помимо разъёма USB-B для подключения к компьютеру).
Единственное что пришлось сделать, так это удлинить некоторые провода, т.к. они были рассчитаны под расположение разъёмов на Lerdge-K. Также пришлось смоделировать и напечатать новый корпус для экрана TFT43. На этот корпус я, помимо родных разъёмов для USB-флешки и SD-карты, расположенных на плате экрана, вывел с помощью удлинителей разъёмы для подключения micro SD-карты и USB-флешки с самой платы SKR (у неё он есть, помимо разъёма USB-B для подключения к компьютеру).  Дабы не сверлить в корпусе принтера новые отверстия, я смоделировал подложку для SKR 2 с учётом уже имевшихся отверстий для крепления подложки Лердж-K.
Дабы не сверлить в корпусе принтера новые отверстия, я смоделировал подложку для SKR 2 с учётом уже имевшихся отверстий для крепления подложки Лердж-K.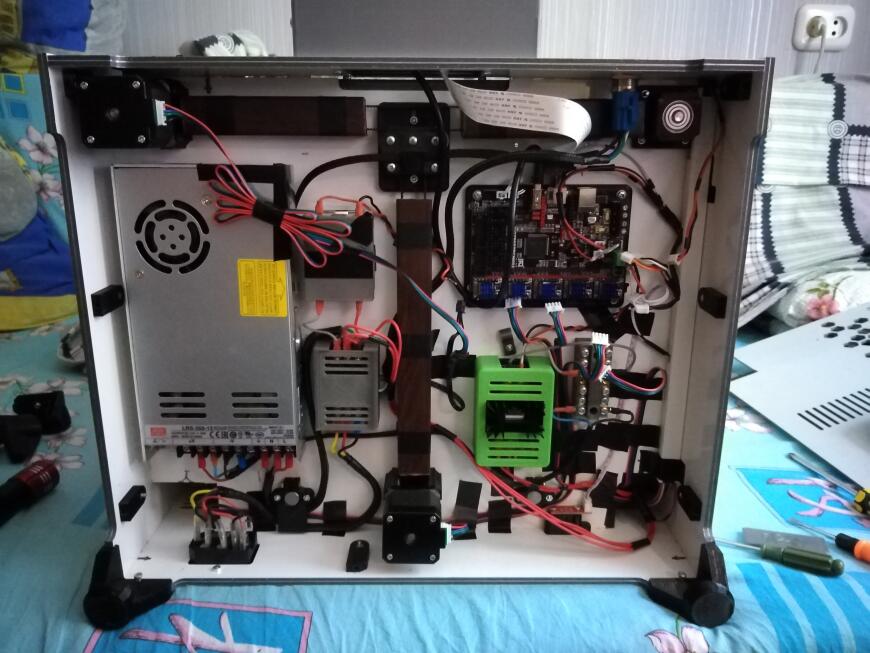 В общем, плата заняла положенное ей место, и можно было приступать к более тонкой настройке прошивки с учётом особенностей механики принтера. Были настроены рывки, ускорения, скорости движения осей.Ещё на стенде я протестировал работу блока автоматического выключения питания от Bigtreetech и его алгоритм работы мне не понравился. Суть его в том, что он включает плату сразу, как только на него подаётся питание 220 вольт. Я понимаю, что это сделано для возобновления печати после внезапного отключения электричества. Но у этой медали есть и обратная сторона, которая меня не устраивает от слова «Совсем». Приведу пример. Вы, по завершению печати, автоматически или через меню, выключили принтер, и ушли из дома на работу. А за время вашего отсутствия, у вас дома кратковременно отключили и включили обратно электричество. И вот вы пришли домой после работы, а принтер у вас оказался включен. А всё потому, что после отключения электричества в вашем доме и его последующего включения, плата автоматического выключения, следуя своей логике работы, включила принтер. Вот именно поэтому я и решил оставить блок автоматического выключения питания от Лердж, подключив его к SKR 2.
В общем, плата заняла положенное ей место, и можно было приступать к более тонкой настройке прошивки с учётом особенностей механики принтера. Были настроены рывки, ускорения, скорости движения осей.Ещё на стенде я протестировал работу блока автоматического выключения питания от Bigtreetech и его алгоритм работы мне не понравился. Суть его в том, что он включает плату сразу, как только на него подаётся питание 220 вольт. Я понимаю, что это сделано для возобновления печати после внезапного отключения электричества. Но у этой медали есть и обратная сторона, которая меня не устраивает от слова «Совсем». Приведу пример. Вы, по завершению печати, автоматически или через меню, выключили принтер, и ушли из дома на работу. А за время вашего отсутствия, у вас дома кратковременно отключили и включили обратно электричество. И вот вы пришли домой после работы, а принтер у вас оказался включен. А всё потому, что после отключения электричества в вашем доме и его последующего включения, плата автоматического выключения, следуя своей логике работы, включила принтер. Вот именно поэтому я и решил оставить блок автоматического выключения питания от Лердж, подключив его к SKR 2.
При подключении блока от Лердж, я исходил как из его распиновки, так и из распиновки платы управления SKR 2.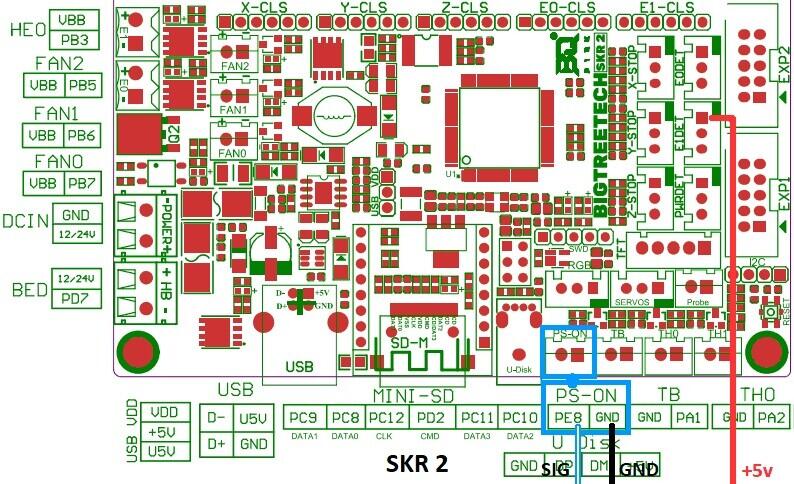
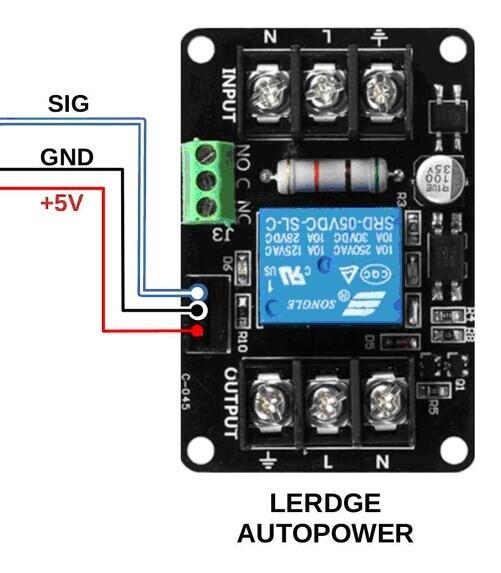
Сигнальный провод и землю от блока автоматического выключения я подключал в разъём PS-ON на плате SKR 2, в соответствии с распиновкой оного, а провод «+5v» я подключил к пину «+5v» незадействованного у меня разъёма E1DET.
Книжка была очень скучной – в ней было много букв и совсем не было картинок.
А теперь немного о том, что я изменял в Марлине под себя для того, чтобы получить нужную мне функциональность:
- Температурная защита как хотенда, так и стола от перегрева в случае выхода из строя нагревательного элемента или термистора.
- Включение обдува радиатора хотенда при нагреве хотенда выше 40 градусов и отключение обдува при его остывании ниже 40 градусов.
- Включение обдува платы и драйверов при работе шаговых двигателей и выключение обдува при простое больше 1 минуты с неработающими шаговыми двигателями.
- Печать с USB-флешек, а не micro SD-карт.
- Управление LED подсветкой печатной зоны принтера.
- Возможность полуавтоматического выравнивания стола в параллель, относительно портала с печатающей головой принтера. В этом режиме печатающая голова циклически двигается по четырём заданным точкам, позволяя выровнять стол винтами, используя щуп известной толщины или обычную бумажку, которые размещаются между соплом и столом.
- Возможность снятия карты стола с помощью имеющегося у меня плёночного датчика, с последующим использованием её при печати.
- Возможность автоматического выключения питания после завершения печати.
- Игнорирование команд на выключение принтера как из G-кода, так и с экрана, если хотенд не остыл ниже 40 градусов.
Сразу предупреждаю – дальше будет много скучных букв.
=== configuration.h ===
Порты подключения, модель материнской платы и количество экструдеров
Для подключения принтера к компьютеру настроил последовательный порт и указал скорость передачи данных для него. #define SERIAL_PORT 1 #define BAUDRATE 115200
Дабы прошивка правильно собралась для моей платы, указал её модель. #define MOTHERBOARD BOARD_BTT_SKR_V2_0_REV_B
Т.к. у меня одноэкструдерный принтер, без всяких смешивающих экструдеров, то указал количество экструдеров равное одному. #define EXTRUDERS 1
Работа с блоком автоматического выключения питания