Что такое кривая намагничивания двигателя
Документация
Смоделируйте динамику коммутируемого двигателя нежелания
Библиотека
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
Описание
Блок Switched Reluctance Motor (SRM) представляет три наиболее распространенных коммутируемых двигателя нежелания: трехфазный 6/4 SRM, четырехфазовый 8/6 SRM, пятифазовый 10/8 SRM, как показано в следующем рисунке.
Электрическая часть двигателя представлена нелинейным основанным на модели на характеристике намагничивания, состоявшей из нескольких кривых намагничивания и на характеристике крутящего момента, вычисленной из кривых намагничивания. Механическая часть представлена моделью в пространстве состояний на основе момента инерции и коэффициента вязкого трения.
Чтобы быть универсальными, две модели реализованы для блока SRM: определенные и типовые модели. В определенной модели SRM характеристика намагничивания двигателя обеспечивается в интерполяционной таблице. Значения получены экспериментальным измерением или вычислены анализом конечных элементов. В типовой модели характеристика намагничивания вычисляется с помощью нелинейных функций и легко доступных параметров.
Параметры
Вкладка параметров
Установите на 6/4 (значение по умолчанию), чтобы задать трехфазный 6/4 двигатель.
Установите на 8/6 задавать четырехфазовый 8/6 двигатель.
Установите на 10/8 задавать пятифазовый 10/8 двигатель.
Установите на 6/4 (60 kw preset model) , 8/6 (75 kw preset model) , или 10/8 (10 kw preset model) использовать предопределенную определенную модель коммутируемого двигателя нежелания. Когда вы используете эти предварительные установки, вы не должны задавать параметры во вкладке Model.
RS сопротивления (Ω) каждой обмотки фазы статора. Значением по умолчанию является 0.01 .
Импульс инерции J (kg.m2) . Значением по умолчанию является 0.0082 .
Коэффициент трения B (N.m.s). Значением по умолчанию является 0.01 .
Initial speed and position
Начальная скорость вращения w0 (rad/s) и начальное положение Theta0 ротора (рад). Значением по умолчанию является [0 0] .
Sample time (−1 for inherited)
Задает шаг расчета, используемый блоком. Чтобы наследовать шаг расчета, заданный в блоке Powergui, установите этот параметр на −1 . Значением по умолчанию является −1 .
Вкладка модели: типовая модель
Выберите Generic model (значение по умолчанию) или Specific model . Вкладка Model изменяется соответственно.
Индуктивность статора, когда ротор находится в невыровненном положении Lq (H). Значением по умолчанию является 0.67e-3 .
Ненасыщенная индуктивность статора, когда ротор находится в выровненном положении Ld (H). Значением по умолчанию является 23.6e-3 .
Saturated aligned inductance
Влажной индуктивностью статора, когда ротор находится в выровненном положении Лдсэт (х). Дефо, является 0.15e-3 .
Максимум статора, текущий, я (A). Значением по умолчанию является 450 .
Maximum flux linkage
Максимальное потокосцепление ψm (Wb или V.s) соответствие я . Значением по умолчанию является 0.486 .
Plot magnetization curves
Если выбрано, маска строит кривые намагничивания, соответствующие обеспеченной интерполяционной таблице. Кривые намагничивания представляют потокосцепление машины по сравнению со статором, текущим с положением ротора в качестве параметра. Значение по умолчанию очищено.
Вкладка модели: определенная модель
Выберите Generic model (значение по умолчанию) или Specific model . Вкладка Model изменяется соответственно.
Выберите Dialog задавать характеристику намагничивания непосредственно в маске блока. Выберите Mat file (значение по умолчанию), чтобы задать характеристику намагничивания из данных в файле MAT. Значением по умолчанию является ‘srm64_60kw.mat’ .
Magnetization characteristic table
Когда параметр Source устанавливается на Dialog , введите двумерную интерполяционную таблицу, содержащую потокосцепление в зависимости от текущего статора и положение ротора. Значением по умолчанию является ‘srm64_60kw.mat’ .
Когда параметр Source устанавливается на MAT-file , введите имя MAT-файла, который содержит таблицу потокосцепления двумерной интерполяционной таблицы, угловой вектор ротора и статор текущий вектор. MAT-файл должен содержать эти три имен переменных: FTBL, RotorAngles и StatorCurrents. Значением по умолчанию является ‘srm64_60kw.mat’ .
Rotor angle vector
Положение ротора Θ (градус), для которого задано потокосцепление. Параметр Rotor angle vector отображается только, когда параметр Source устанавливается на Dialog . Значением по умолчанию является [0 10 20 30 40 45] .
Stator current vector
Текущий статор (A), для которого задано потокосцепление. Параметр stator current vector отображается только, когда параметр Source устанавливается на Dialog . Значением по умолчанию является [0:25:450] .
Plot magnetization curves
Если выбрано, маска строит кривые намагничивания, соответствующие обеспеченной интерполяционной таблице. Кривые намагничивания представляют потокосцепление машины по сравнению со статором, текущим с положением ротора в качестве параметра. Значение по умолчанию очищено.
Вводы и выводы
Вход блока является механическим крутящим моментом нагрузки (в N.m). TL положителен в моторной операции и отрицателен в работе генератора.
Выходной m блока является вектором, содержащим несколько сигналов. Можно демультиплексировать эти сигналы при помощи блока Селектора Шины из библиотеки Simulink ® .
Система регулирования вектора напряжения
Уникальная система регулировки вектора напряжения «Voltage Vector Control», представленная в приводе VLT 3500, была доработана в систему «Voltage Vector Control Plus (VVC+)». Система VVC+ обеспечивает практически синусоидальную форму кривой выходного тока, что обеспечивает оптимальное намагничивание двигателя.
При этом нет даже потребности в снижении номинальных характеристик двигателя для получения полных оборотов, установок полной нагрузки. Для установок с переменным крутящим моментом нет даже потребности в снижении номинальных характеристик для любых рабочих оборотов. Максимальное выходное напряжение преобразователя частоты «VLT HVAC Drive» на полных оборотах и при полной нагрузке может быть равно входному напряжению. Его точное значение не зависит от напряжения линии или шины постоянного тока. Вместо этого оно будет точно равно заданному пользователем выходному напряжению, устанавливаемому во время настройки. Даже если входная линия ниже требуемого выходного напряжения на 10%, требуемое выходное напряжение будет выдерживаться.
В дополнение к постоянному контролю и управлению частотой и напряжением, система VVC+ постоянно измеряет амплитуду и фазовый угол тока во всех трех фазах двигателя. Требование текущего напряжения и сдвиг при текущей нагрузке рассчитывается по модели двигателя. Система автоматической адаптации двигателя «Automatic Motor Adaptation» помогает создавать точную модель двигателя. После чего система VVC+ настраивает выходную частоту и напряжение, которые точно соответствуют потребностям двигателя. Это оптимизирует работу двигателя в широком диапазоне оборотов и нагрузок.
Нет потребности в выборе кривой U/f для аппроксимации потребностей нагрузки на двигателе. Система VVC+ делает это автоматически и постоянно. Система VVC+ определяет как ток, необходимый для создания крутящего момента, так и ток, необходимый для намагничивания двигателя. Это позволяет точно представлять двигатель и его нагрузку.
Схема управления системы VLT HVAC Drive использует алгоритм VVC+ . Система VVC+ превосходит традиционные схемы управления широтно-импульсной модуляцией (ШИМ) по следующим моментам:
- Полное номинальное напряжение двигателя обеспечивается на номинальной частоте.
- Полная номинальная нагрузка двигателя может развиваться на полных оборотах.
- Текущие требования по напряжению и току двигателя непрерывно моделируются.
- Работая в комбинации с AMA, всегда обеспечивается идеальный уровень напряжения, максимизирующий характеристики и эффективность, минимизируя при этом нагрев.
- Форма кривой выходного тока представляет собой практически превосходную синусоиду.
- Автоматически выбирается идеальная модель переключения инвертора для конкретных условий работы.
- Модель переключения для низких оборотов обеспечивает надежный запуск и плавную работу на низких оборотах.
- Модель переключения для высоких оборотов минимизирует потери на переключение и максимизирует коэффициент полезного действия преобразователя частоты.
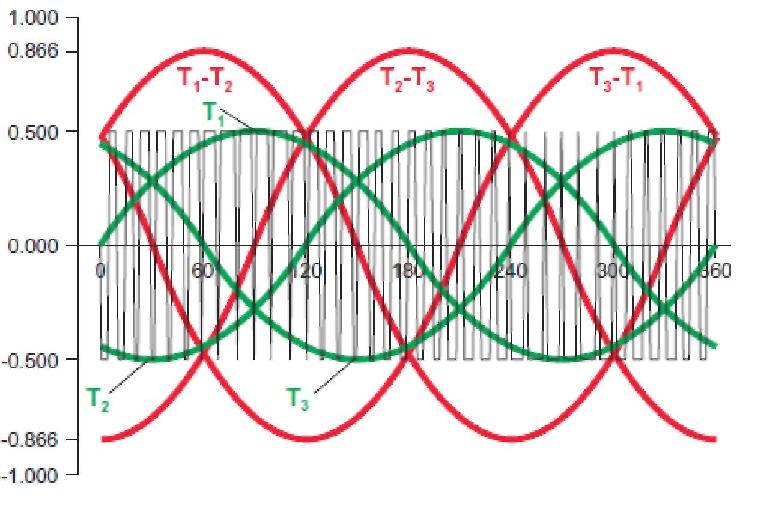
Рисунок 1. Модуляция асинхронного вектора магнитного потока через статор SFAVM (Stator Flux Asynchronous Vector Modulation) для обеспечения характеристик на низких оборотах
Непрерывное пульсирование всех шести биполярных транзисторов с изолированным затвором (IGBT) инвертора для моделирования требуемой синусоидальной формы выхода является идеальным для работы на низких оборотах. Это гарантирует плавную работу двигателя и позволяет преобразователю частоты удовлетворять требованиям по высокому трению при запуске или высоким инерционным нагрузкам.
Однако данная модель переключения не подходит для работы на высоких оборотах. Непрерывное пульсирование всех шести биполярных транзисторов с изолированным затвором (IGBT) инвертора создает чрезмерные потери на переключение инвертора, повышенное выделение тепла и уменьшенный КПД преобразователя частоты. Кроме того, если модель чистой синусоиды выполняется для каждого напряжения между линией и нейтралью, максимальное выходное напряжение ограничивается значением 87% от входного напряжения. Это позволяет двигателю создавать номинальную мощность без превышения номинального тока двигателя. Для получения более высоких напряжений на полных оборотах некоторые обычные преобразователи частоты с ШИМ добавляют третью и четвертую гармоники к своей опорной кривой переменного тока. Без полного напряжения на двигателе обычные кривые ШИМ используют коэффициент характера нагрузки двигателя, чтобы создавать номинальный выход двигателя. Это сокращает срок службы двигателя.
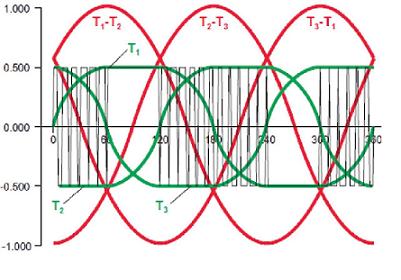
Рисунок 2. 60-градусная модуляция асинхронного вектора «60° AVM (60 Degree Asynchronous Vector Modulation)» для КПД на высоких оборотах и полной выходной мощности двигателя
В результате ограничений по высоким оборотам модуляции SFAVM, преобразователь частоты VLT HVAC Drive автоматически изменяет свою модель переключения свыше предварительно заданной выходной частоты. Сверх этих оборотов 32-битный микропроцессор удерживает каждый биполярный транзистор с изолированным затвором (IGBT) инвертора включенным в течение 60° полного цикла и выключенным в течение следующих 60° полного цикла. Не выполнение переключения в каждом биполярном транзисторе с изолированным затвором (IGBT) инвертора в течение 120° каждого выходного цикла, система VLT HVAC Drive минимизирует потери на переключение. Кроме того, эта уникальная модель переключения позволяет преобразователю частоты обеспечивать двигатель полным номинальным напряжением. Это позволяет двигателю создавать полный номинальный крутящий момент на полных оборотах без чрезмерного выделения тепла двигателем.
Магнитное напряжение зубцовой зоны статора
Общая формула для расчета магнитного напряжения зубцовой зоны статора имеет вид
 (6.2)
(6.2)
где hZ1 — расчетная высота зубца статора, м;
НZ1 — расчетная напряженность поля в зубце, А. Напряженность поля в зубце определяют по кривым намагничивания для принятой марки стали. Кривая намагничивания стали 2013 для зубцов асинхронного двигателя приведена в таблице 6.1.
Кривая намагничивания для зубцов асинхронных двигателей (сталь 2013)
| В, Тл | 0,01 | 0,02 | 0,03 | 0,04 | 0,05 | 0,06 | 0,07 | 0,08 | 0,09 |
| Н, А/м | |||||||||
| 0,4 | |||||||||
| 0,5 | |||||||||
| 0,6 | |||||||||
| 0,7 | |||||||||
| 0,8 | |||||||||
| 0,9 | |||||||||
| 1,0 | |||||||||
| 1,1 | |||||||||
| 1,2 | |||||||||
| 1,3 | |||||||||
| 1,4 | |||||||||
| 1,5 | |||||||||
| 1,6 | |||||||||
| 1,7 | |||||||||
| 1,8 | |||||||||
| 1,9 | |||||||||
| 2,0 | |||||||||
| 2,1 | |||||||||
| 2,2 | |||||||||
| 2,3 | 15 100 |
Расчетную высоту зубцов hZ1 и расчетную напряженность поля НZ1определяют по-разному в зависимости от конфигурации зубцов, связанной с формой пазов статора.
Зубцы с параллельными гранями (в статорах с грушевидными или трапецеидальными пазами по рис. 4.7). Индукция в зубце, Тл:
 (6.3)
(6.3)
где bZ1 – расчетная ширина зубца, м, определяется по формулам табл. 4.9;
если размеры b‘Z1 и b»Z2 различаются менее чем на 0,5 мм, то
bZ1= 0,5 (b‘Zl+ b«Z2). При различии, превышающем 0,5 мм, следует либо скорректировать размеры паза, либо определить расчетную напряженность поля HZ1 как для зубцов с изменяющейся площадью поперечного сечения (см. ниже);
kC1 — коэффициент заполнения сталью сердечника статора (см. табл. 4.5).
Расчетная высота паза hZ1 определяется по табл. 4.9.
Зубцы с изменяющейся площадью поперечного сечения (в статорах с прямоугольными пазами по рис. 4.6). Расчетная высота зубца hZ1 = hn, Расчетная напряженность поля, А/м:
 (6.4)
(6.4)
Индукции BZ1max и BZ1min рассчитывают по (6.3), подставляя в формулу вместо размера bZ1 соответственно наименьшее и наибольшее значения ширины зубца, м, рассчитанные по формулам табл. 4.7.
Магнитное напряжение зубцовой зоны, А:
 (6.5)
(6.5)
Практикуют также определение расчетной напряженности по индукции в поперечном сечении зубца на расстоянии 1/3 высоты от его наиболее узкой части. В этом случае в (6.3) вместо bZ1 подставляют значение bZ1/3 (см. табл. 4.7). Расчетная напряженность поля в зубце HZ1=HZ1/3=f(BZ1/3).
Если индукция в каком-либо одном или в нескольких сечениях зубца окажется больше 1,8 Тл, то необходимо учесть ответвление части потока зубцового деления ФtZ=BδtZ1lδ в паз, при котором действительная индукция в зубце уменьшается по сравнению с рассчитанной по (6.3). Метод определения действительной индукции связан с расчетом коэффициента kn. Коэффициент kn рассчитывают для каждого из сечений зубца, в котором индукция превышает 1,8 Тл, и соответствующего ему по высоте сечения паза. По значению kn и расчетной индукции определяют действительную индукцию в данном сечении зубца. В зубцах с параллельными гранями при индукции выше 1,8 Тл коэффициент kn рассчитывают по соотношению площадей поперечных сечений зубца и паза на середине высоты зубца. В зубцах с изменяющейся площадью поперечного сечения при определении расчетной напряженности по BZ1/3 коэффициент kn рассчитывают по соотношению площадей поперечных сечений зубца и паза на высоте 1/3 наиболее узкой части зубца. Это приводит к некоторой погрешности в определении расчетной напряженности поля в зубце, но при средних уровнях индукций, характерных для зубцовой зоны статора, эта погрешность не оказывает заметного влияния на результаты расчета.
Дата добавления: 2014-11-12 ; просмотров: 757 . Нарушение авторских прав
Большая Энциклопедия Нефти и Газа
Универсальная кривая — намагничивание
Универсальная кривая намагничивания в относительных величинах приведена на фиг. За единицу приняты номинальный ( по режиму ПВ-25 / 6) магнитный поток и намагничивающая сила обмотки возбуждения двигателя смешанного возбуждения тихоходного исполнения. [1]
Использование универсальной кривой намагничивания позволяет значительно сократить магнитные расчеты, так как в этом случае для построения требуемой кривой намагничивания нужно определить координаты только одной точки и коэффициент насыщения в данной точке. [2]
Существование универсальной кривой намагничивания может быть объяснено следующим образом. [3]
Использование универсальной кривой намагничивания позволяет значительно сократить магнитные расчеты, так как для построения требуемой кривой намагничивания нужно определить координаты только одной точки и коэффициент насыщения в ней. [4]
На рис. 3 — 24 дана универсальная кривая намагничивания , построенная как средняя для краново-металлурги-ческих двигателей типов МТ и МТК. [6]
На рис. 111.11 6 даны в относительных единицах универсальная кривая намагничивания ( / 1 / ( / 1) и зависимость Л) 1 ф ( / д) Для асинхронных краново-металлургических двигателей. [7]
Расчет характеристик динамического торможения проводим по (2.20) с использованием универсальной кривой намагничивания . [9]
S, то поступают следующим образом. На универсальной кривой намагничивания ( рис. 2.25) из начала координат проводят вспомогательную прямую, образующую с осью ординат угол у2, тангенс которого в 1 5 раза больше тангенса угла YI, образуемого прямолинейной частью универсальной кривой намагничивания с той же осью. [10]
Если требуется построить кривую намагничивания для машины, имеющей, например, / гнас1 5, то поступают следующим образом. На универсальной кривой намагничивания ( рис. 3 — 25, б) из начала координат проводят вспомогательную прямую, образующую с осью ординат угол у2, тангенс которого в 1 5 раза больше тангенса угла YI образуемого прямолинейной частью универсальной кривой намагничивания с той же осью. [11]
Поскольку в двигателе последовательного возбуждения ток якоря является током возбуждения, зависимость между током якоря / я и потоком полюса Ф будет нелинейной. Эту зависимость характеризует универсальная кривая намагничивания , изображенная на ОИС. [12]
S, то поступают следующим образом. На универсальной кривой намагничивания ( рис. 2.25) из начала координат проводят вспомогательную прямую, образующую с осью ординат угол у2, тангенс которого в 1 5 раза больше тангенса угла YI, образуемого прямолинейной частью универсальной кривой намагничивания с той же осью. [13]
Если требуется построить кривую намагничивания для машины, имеющей, например, / гнас1 5, то поступают следующим образом. На универсальной кривой намагничивания ( рис. 3 — 25, б) из начала координат проводят вспомогательную прямую, образующую с осью ординат угол у2, тангенс которого в 1 5 раза больше тангенса угла YI образуемого прямолинейной частью универсальной кривой намагничивания с той же осью. [14]