Что такое сериесный двигатель
Что такое сериесный двигатель
В этом двигателе обмотка возбуждения включена последовательно в цепь якоря, поэтому магнитный поток Ф зависит от тока нагрузки I=I а =I в.
При небольших нагрузках магнитная система машины ненасыщена и зависимость магнитного потока от тока нагрузки прямо пропорциональна, т.е. Ф=к ф I а, где к ф – коэффициент пропорциональности.
При этом электромагнитный момент: М=С м к ф I а 2 .
Формула частоты вращения принимает вид:
 | (8) |
Таким образом, вращающий момент двигателя при ненасыщенной магнитной системе пропорционален квадрату тока, а частота вращения обратно пропорциональна току нагрузки.
1) Скоростная характеристика n=f(I)
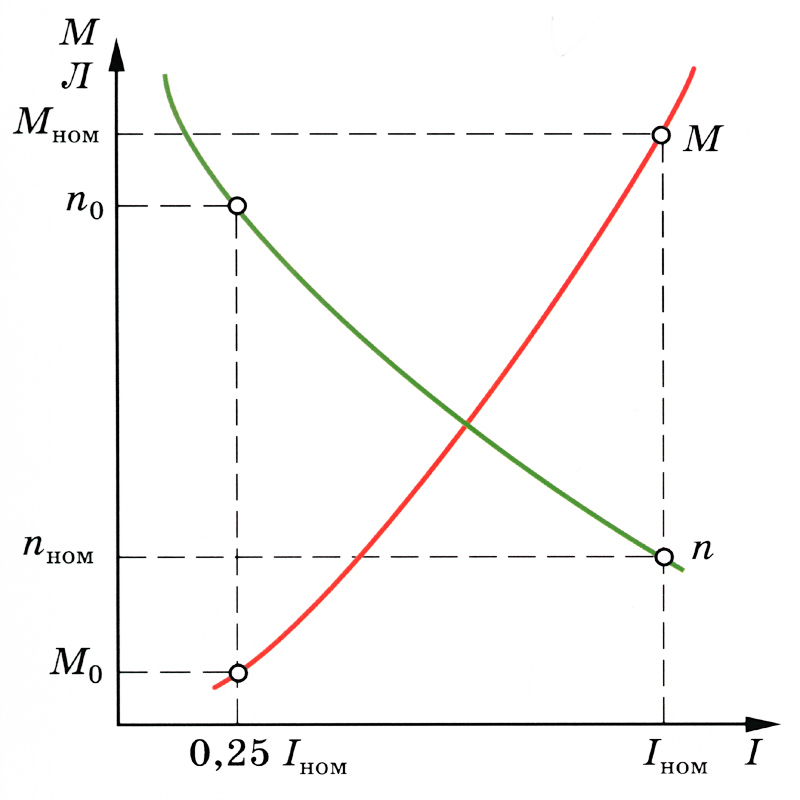


Из графика видно, что при ненасыщенной магнитной системе (при малых нагрузках) с увеличением нагрузки частота вращения резко убывает. Но затем наступает насыщение магнитной системы двигателя и магнитный поток при возрастании нагрузки практически не изменяется и скоростная характеристика приобретает почти прямолинейный характер, Такую характеристику принято называть мягкой.
При уменьшении нагрузки ДПТ последовательного возбуждения частота вращения резко увеличивается и при нагрузке меньше 25% от номинальной может достигнуть опасных для двигателя значений ( «разнос» ). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Для более надежной работы вращающий момент с двигателя на рабочий механизм передают только с помощью зубчатых передач. Применение ременных и цепных передач недопустимо, так как при разрыве гибкой связи может произойти «разнос» двигателя.
2) Зависимость электромагнитного момента М от тока нагрузки М=f(I)
Электромагнитный момент М при увеличении нагрузки резко возрастает, так как он пропорционален квадрату тока нагрузки.
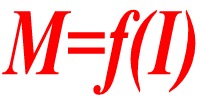
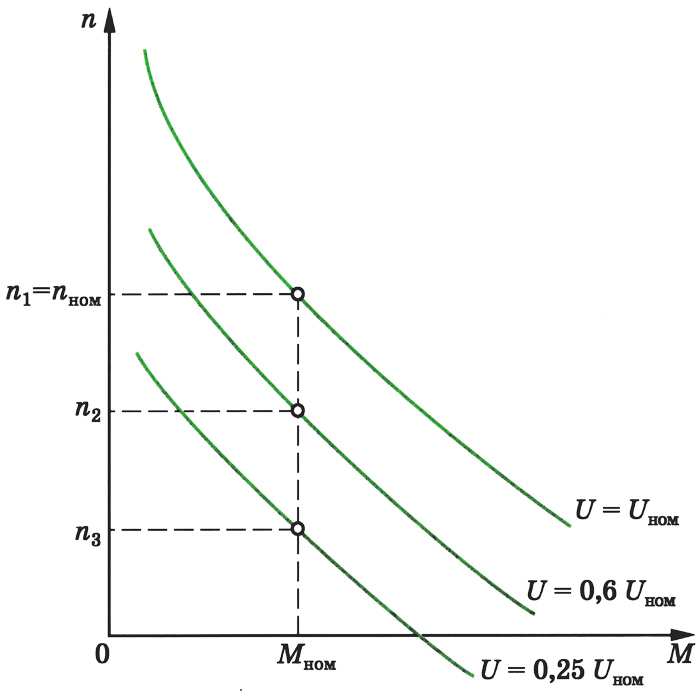
Механическая характеристика n=f(М)
Резко падающая кривая механической характеристики обеспечивает ДПТ последовательного возбуждения устойчивую работу при любой нагрузке большей 25% от номинальной.
Регулирование частоты вращения двигателя последовательного возбуждения
Это можно делать двумя способами:
— изменением напряжения U ;
— изменением величины магнитного потока Ф .
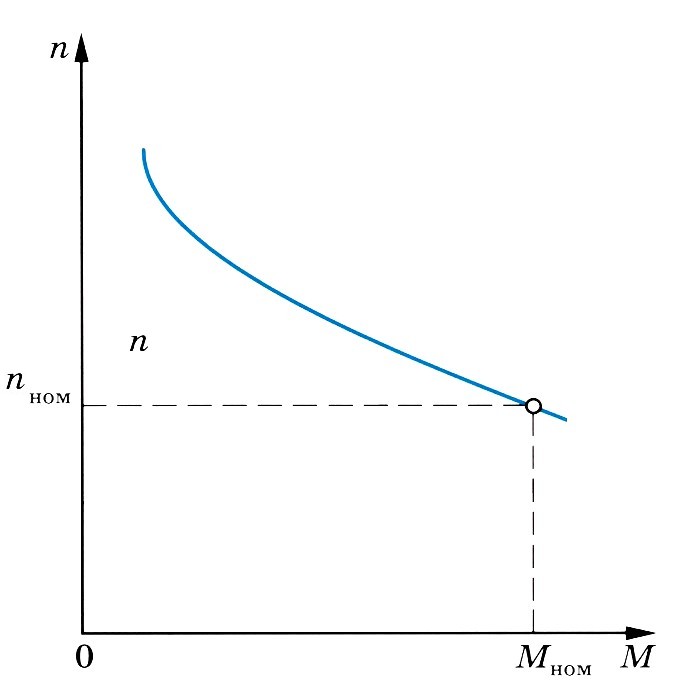
а) Изменение напряжения U подаваемого на двигатель
Для этого в цепь якоря включают регулировочный реостат R рг.
С увеличением сопротивления реостата уменьшается напряжение на входе двигателя и частота его вращения (↑R рг ⇒↓U ⇒↓n) . Этот метод применяют для двигателей небольшой мощности. В случае значительной мощности этот способ неэкономичен из-за больших габаритов и больших потерь мощности в регулировочном реостате.
При совместной работе нескольких однотипных двигателей напряжение меняют изменением схемы их включения относительно друг друга.
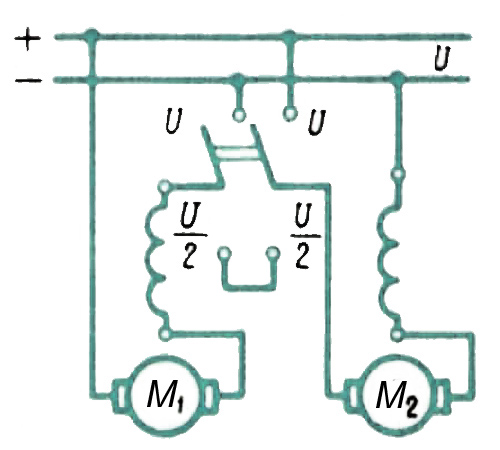
При ПАРАЛЛЕЛЬНОМ включении двух двигателей каждый из них оказывается под полным напряжением сети , а при ПОСЛЕДОВАТЕЛЬНОМ включении двух двигателей на каждый двигатель приходится половина напряжения сети
При одновременной работе большего числа двигателей возможно большее количество вариантов включения. Этот способ регулирования частоты вращения применяют на электровозах.
Изменение подводимого к двигателю напряжения возможно также при питании его от источника постоянного тока с регулируемым напряжением. При уменьшении напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны.
б) Изменение основного магнитного потока
Изменять величину магнитного потока можно тремя способами.
1) Шунтирование обмотки возбуждения
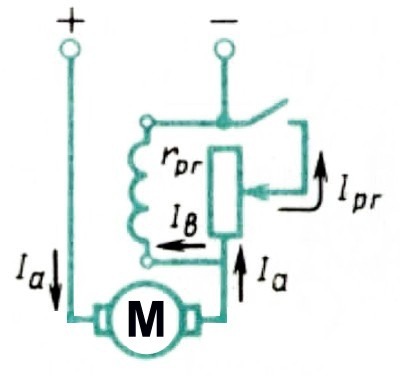
Параллельно к обмотке возбуждения подключают реостат r рг. Уменьшение сопротивления этого реостата ведет к снижению тока возбуждения I в =I а -I рг, а следовательно, к увеличению частоты вращения ( ↓ r рг ⇒ ↑I рг ⇒ ↓ I в ⇒ ↓ Ф ⇒↑n)
Этот способ экономичен и часто применяется, например, для регулирования частоты вращения тяговых двигателей тепловозов.
2) Шунтирование обмотки якоря
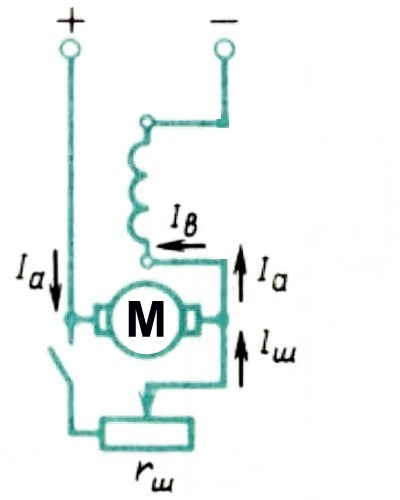
При шунтировании обмотки якоря реостатом r ш увеличивается ток возбуждения I в =I а +I ш, что вызывает уменьшение частоты вращения ( ↓r ш ⇒ ↑I ш ⇒ ↑I в ⇒ ↑Ф ⇒ ↓ n) .
Этот способ неэкономичен и применяется редко.
3) Секционирование обмотки возбуждения
В этом случае обмотка возбуждения имеет конструкцию, позволяющую включать в работу разное число витков w в, при этом изменяется МДС обмотки возбуждения (F в =w в ·I в ) , следовательно меняется основной магнитный поток Ф и частота вращения. Например, ↓ w в ⇒ ↓ F в ⇒ ↓Ф ⇒ ↑ n и наоборот.
Применение двигателей последовательного возбуждения
Таким образом, двигатели последовательного возбуждения обладают следующими свойствами:
1) развивают большой вращающий момент пропорциональный квадрату тока, что важно в тяжелых условиях пуска и при перегрузках;
2) при постепенном увеличении нагрузки мощность на входе двигателя растет медленнее, чем вращающий момент, так как момент пропорционален квадрату тока, а потребляемая мощность — току в первой степени (Р 1 =U·I)
3) двигатели могут устойчиво работать на малых оборотах;
4) устойчиво работают при любой нагрузке большей 25% от номинальной.
Поэтому эти двигатели широко применяют в качестве тяговых на транспорте, в качестве крановых в подъёмных установках, т.е. во всех случаях электропривода с тяжелыми условиями пуска и сочетания значительных нагрузок на вал двигателя с малой частотой вращения.
Электродвигатели для моделей кораблей
На моделях кораблей, как правило, электродвигатели постоянного тока на рабочее напряжение от 1,5 до 40В.
Малогабаритные электромоторы называют микроэлектродвигателями.
По способу возбуждения электродвигатели постоянного тока подразделяются на двигатели с независимым возбуждением, в которых магнитный поток возбуждения создается постоянными стальными магнитами (двигатели с возбуждением от постоянных магнитов) и двигатели с самовозбуждением, у которых магнитный поток возбуждения создается с помощью катушек, питаемых электроэнергией от того же источника, что и якорь электродвигателя. Устройство электродвигателя с самовозбуждением показано на рис. 86.
Принцип работы электродвигателя постоянного тока заключается в том, что электрический ток, проходя одновременно по неподвижным обмоткам возбуждения через щетки и коллектор по обмотке якоря, создает два магнитных поля.

Рис. 86. Устройство электродвигателя: 1 — общий вид двигателя; 2 — кожух; 3 — крышка; 4 — корпус с полюсами; 5 — щетки; 6 — якорь с коллектором; 7 — стяжные болты.
В результате взаимодействия этих магнитных полей (якоря и полюсов) на якоре возникает крутящий момент.

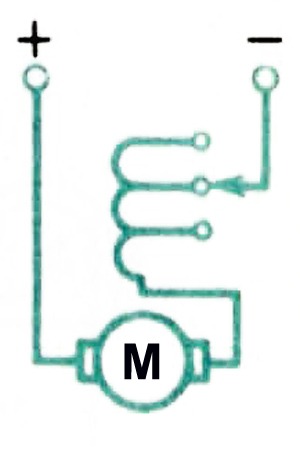
Рис. 87. Схемы различных электродвигателей: А—шунтового; Б — сериесного; В — компаундного.
Электродвигатели с самовозбуждением в зависимости от способа включения обмоток возбуждения подразделяются на шунтовые с обмоткой возбуждения, включенной параллельно обмотке якоря двигателя, сериесные двигатели с обмоткой возбуждения, включенной последовательно с обмоткой якоря, и компаундные, у которых одновременно имеются и шунтовая и сериесная обмотки возбуждения (рис. 87, А, Б и В). Компаундные микродвигатели встречаются редко.
У шунтовых двигателей (с параллельным возбуждением) обмотка возбуждения имеет относительно большое количество витков провода малого сечения и по ней идет всего 8— 12% от общего тока, потребляемого двигателем.

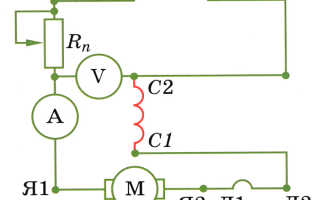
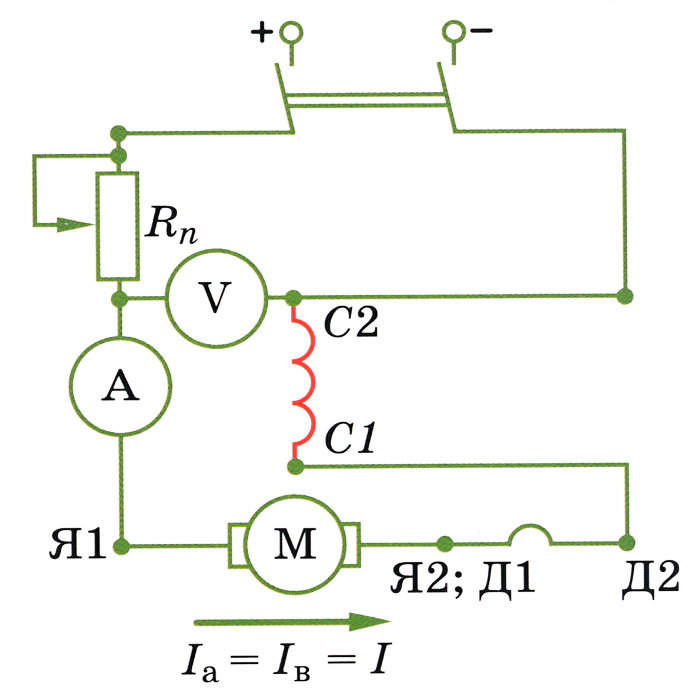
Рис. 88. Сериесный двигатель с двумя обмотками возбуждения.
У сериесных двигателей (с последовательным возбуждением) обмотка возбуждения имеет относительно малое количество витков провода большого сечения и через нее последовательно с якорем проходит весь электрический ток, потребляемый двигателем.
Коэффициент полезного действия (к.п.д.) микродвигателей мощностью 30—200 Вт составляет 40—50%, а у микродвигателей до 30 Вт 20—30%. Чем меньше электродвигатель и меньше рабочее напряжение, тем меньше его к.п.д.
Промышленность в большом ассортименте выпускает электродвигатели типа МУ. Из них самые распространенные — двигатели МУ-30, МУ-50 и МУ-100. Это двигатели с двумя сериесными обмотками, что облегчает изменение направления вращения (реверсирование) двигателя (рис. 88). Их рабочее напряжение — 27 В.

Рис. 89. Изменение числа оборотов с увеличением нагрузки: А — сериесного двигателя; Б — шунтового двигателя.
Двигатели типа МУ спортсмены устанавливают на различных самоходных и радиоуправляемых моделях. Для обеспечения масштабной скорости самоходной модели гражданского судна водоизмещением 16—18 кг вполне достаточно поставить один двигатель МУ-30, для модели крейсера или эсминца того же водоизмещения масштабную скорость вполне обеспечат два двигателя МУ-50 или один двигатель МУ-100. Последние могут быть использованы и для скоростных управляемых моделей.
Работу двигателей типа МУ можно несколько улучшить, повысив их коэффициент полезного действия на 10—15%. У двигателей этого типа из двух сериесных обмоток возбуждения одна действует при одном направлении вращения, другая — при обратном. Если изменять направление вращения двигателя нет необходимости, то можно подключить обе обмотки, соединив концы и начала между собой. При таком включении двигатель работает лучше и, в частности, при длительной работе не перегревается.
Сериесные двигатели, имеют относительно большой крутящий момент на валу Мкр, но с увеличением нагрузки обороты двигателя сильно уменьшаются (кривая А на рис. 89). Шунтовые двигатели почти не меняют числа оборотов с изменением нагрузки (кривая Б на рис. 89). Так, например, если сериесные двигатели типа МУ при изменении нагрузки на 20—30% уменьшают число оборотов на 1500 об/мин и более, то шунтовые двигатели при том же изменении нагрузки уменьшают обороты всего на 100—200 об/мин.
Шунтовые электродвигатели часто устанавливают на моделях судов. Хорошо зарекомендовали себя двигатели Д-25-Т, ДРВ-20 и др. На малых моделях хорошо работают электромоторы с постоянными магнитами. Их полезная мощность на валу обычно колеблется до 30 Вт, двигатели мощностью более 30 Вт встречаются редко.

Рис. 90. Приспособление для определения мощности электродвигателя: А—испытуемый двигатель; Б — динамомашина.
Электродвигатели мощностью 5—10 Вт устанавливаются на различные малогабаритные модели водоизмещением до 3—4 кг, двигатели мощностью 15—30 Вт на радиоуправляемые модели фигурного курса, скоростные управляемые модели и самоходные модели гражданских судов водоизмещением 10— 18 кг. Двигатели мощностью менее 5 Вт используются обычно на различную автоматику или на самые маленькие модели.
Наиболее распространены электродвигатели с возбуждением от постоянных магнитов типа ДП, ДПМ, ДПР и Д. Полная мощность двигателя, потребляемая от источника тока, равна произведению силы тока на напряжение источника: Pn = IU,
Полезную (эффективную) мощность на валу двигателя Рэ можно определить, если известен коэффициент полезного действия двигателя (к.п.д.).

Например, для электродвигателя ДПМ-35 к.п.д примерно равен 40%, а потребляемая мощность им от источника тока равна 30 Вт, Поэтому полезная мощность этого двигателя

По известной полезной мощности в ваттах — Рэ и числу оборотов в минуту (n) можно подсчитать крутящий момент на валу двигателя Мкр по формуле

Чтобы измерить полезную мощность микроэлектродвигателей, можно оборудовать стенд, для которого потребуется два амперметра, два вольтметра, реостат, динамомашина. В качестве динамомашины можно использовать микроэлектродвигатель примерно той же мощности с постоянными магнитами или шунтовой обмоткой возбуждения. Шунтовую обмотку на время испытаний нужно подключить к внешнему источнику тока, чтобы создать магнитное поле, индуктирующее ток в якоре динамомашины.
Вал испытуемого двигателя муфтой соединяют с валом динамомашины (рис. 90) и включают их в схему (рис. 91).

Рис. 91. Принципиальная схема приспособления: 1 — испытуемый двигатель; 2 — источник питания; 3 — тумблер; 4 — амперметр; 5 — вольтметр; 6 — динамо-машина; 7 — амперметр; 8 — вольтметр; 9 — нагрузочное сопротивление.
Выключателем 3 запускают испытуемый мотор 1 и замеряют ток / (по амперметру 4) и напряжение U (по вольтметру 5). Произведение IU равно потребляемой мотором мощности: Рп =lU.
Произведение показаний приборов 7 и 8 (/ и U) принимается равным мощности нагрузки электромотора или его полезной мощности: Pэ = IU. Устанавливая реостатом 9 разные нагрузки, найдем значения Рn и Рэ. Их отношения дадут значение к.п.д. в зависимости от мощности нагрузки. По этим данным и оценивают пригодность двигателя для установки на выбранную модель корабля.
СЕРИЕСНЫЙ ДВИГАТЕЛЬ.
Так как ток возбуждения равен току якоря, то при увеличении тока якоря будет увеличиваться ток возбуждения и магнитный поток. Поэтому вращающий момент такого двигателя зависит от квадрата тока якоря (если ток якоря увеличится в 2 раза, то и магнитный поток увеличится в 2 раза, соответственно вращающий момент увеличится в 4 раза). Такая зависимость сохраняется до магнитного насыщения полюсов машины. При дальнейшем увеличении тока якоря свыше тока насыщения вращающий момент будет увеличиваться прямо пропорционально от тока якоря.
При увеличении механической нагрузки на валу, частота вращения будет значительно уменьшаться в основном из-за увеличения магнитного потока и частично из-за увеличения падения напряжения в обмотке якоря. При достижении магнитного насыщения полюсов дальнейшее уменьшение частоты вращения будет незначительным, только за счёт падения напряжения в обмотке якоря. Такая характеристика частоты вращения называется мягкой. При уменьшении момента сопротивления частота вращения увеличивается и если момент сопротивления будет мал, то она увеличится резко. Но так как мал магнитный поток, то он не может быть больше напряжения и двигатель не сможет автоматически перейти в генераторный режим. Поэтому такой двигатель запрещается запускать без механической нагрузки на валу, иначе он пойдёт вразнос.

Реакция якоря.

Линия, проведённая перпендикулярно оси полюсов через середину расстояния между ними называется геометрической нейтралью.
Линия, проведённая перпендикулярно магнитному потоку полюсов и проведённая через середину расстояния между полюсами называетсяфизической нейтралью.
 При отсутствии тока в обмотке якоря физическая и геометрическая нейтрали совпадают.
При отсутствии тока в обмотке якоря физическая и геометрическая нейтрали совпадают.
При протекании тока по виткам якоря они создают магнитное поле вокруг себя. Воздействие магнитного поля якоря на магнитное поле полюсов машины называется реакцией якоря. В результате реакции якоря основное магнитное поле машины искажается и происходит сдвиг физической нейтрали относительно геометрической.


Это приводит к появлению следующих вредных последствий:
1) Размагничивающее действие реакции якоря.
Так как под одним краем полюса магнитное поле усиливается, то под другим уменьшается. Там, где оно усиливается — происходит магнитное насыщение, а где магнитное поле ослабло (причём в большей степени, чем произошло усиление) – размагничивание. Общее магнитное поле уменьшается и уменьшается вращающий момент у тяговых двигателей или ЭДС, если это генератор.
2) Увеличивается вероятность возникновения кругового огня по коллектору.
Так как в витке, проходящем через сгущение магнитных силовых линий, индуктируется большая ЭДС, то увеличивается напряжение между двумя коллекторными пластинами, к которым подсоединяется данный виток, и изоляция между этими коллекторными пластинами может быть пробита. А так как все витки проходят через сгущение магнитных силовых линий, то множество элементарных дуг могут замкнуть две разноимённые щётки между собой. Тогда возникнет мощная электрическая дуга, которая называется
круговым огнём по коллектору.
3) Вредные последствия ухудшения коммутации.
Активные стороны той секции, которая замыкается щёткой, лежат на геометрической нейтрали. Из-за реакции якоря в этой секции индуктируется ЭДС вращения, которая увеличивает искрение под щётками.
Дата добавления: 2019-02-08 ; просмотров: 202 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Что такое сериесный двигатель
Для привода механизмов кранов и других подъемно-транспортных машин применяются электродвигатели постоянного и трехфазного переменного тока. По своим электромеханическим свойствам электродвигатели постоянного тока наилучшим образом соответствуют условиям работы подъемно-транспортных машин. Но для их питания требуются преобразовательные агрегаты или специальная сеть постоянного тока. Поэтому электродвигатели постоянного тока используют, как правило, для кранов, работающих в особо тяжелых условиях, при частых и значительных перегрузках, а также в тех случаях, когда требуется широкое и плавное регулирование скорости и точная остановка (монтажные краны, быстроходные лифты и т.п.). Электродвигатели постоянного тока различаются по способу возбуждения и по схеме включения обмоток (рис. 4).

Электродвигатель с независимым возбуждением (рис. 4, а) имеет обмотку возбуждения, питаемую от постороннего источника постоянного тока (специального возбудителя, посторонней сети и т. д.). В таком электродвигателе величина тока возбуждения не зависит от его скорости и нагрузки. Электродвигатели с независимым возбуждением для привода подъемно-транспортных машин применяются редко, так как при достаточно мощном источнике питания нет особого различия между работой электродвигателей с параллельным ил и независимым возбуждением. Поэтому более целесообразно .использовать электродвигатели с параллельным возбуждением, которые не требуют отдельного источника для питания обмотки возбуждения.
Электродвигатель с параллельным возбуждением или шунговой электродвигатель (рис. 4, б) имеет обмотку возбуждения, которая подключается к зажимам якоря. Если машина работает в генераторном режиме, то такое подключение обмотки возбуждения приводит к сильной зависимости тока возбуждения от нагрузки. Однако в двигательном режиме этого почти не наблюдается, так как к якорю двигателя подается напряжение, не зависящее от нагрузки. Электродвигатели с параллельным возбуждением могут использоваться для привода лифтов, механизмов подъема, поворота и передвижения кранов.

Электродвигатель с последовательным возбуждением (сериесный электродвигатель) снабжается обмоткой возбуждения (рис. 4, в), соединенной последовательно с обмоткой якоря. Поэтому магнитный поток возбуждения очень сильно зависит от нагрузки электродвигателя. Как правило, такие электродвигатели используются для привода механизмов подъема кранов.
Электродвигатель со смешанным возбуждением (компаундный электродвигатель) имеет две обмотки возбуждения: последовательную и параллельную (рис. 4, г). Магнитный поток возбуждения в данном случае в меньшей степени зависит от нагрузки электродвигателя, чем у электродвигателей с последовательным возбуждением. В зависимости от того, какая из двух обмоток создает больший магнитный поток, характеристики электродвигателя со смешанным возбуждением приближаются к характеристикам электродвигателей с параллельным или последовательным возбуждением. Чаще всего такие электродвигатели попользуются для привода механизмов передвижения тележек и мостов кранов.
По конструктивному исполнению электродвигатели постоянного тока различного возбуждения ничем практически не отличаются друг от друга. Основными частями кранового электродвигателя постоянного тока (рис. 5) являются станина с полюсами 1 и якорь 3 с коллектором 4. Станина выполняется из стали или чугуна. На ней располагаются главные полюсы 1 с обмотками возбуждения 2. Полюсы набираются из тонких листов специальной электротехнической стали толщиной 0,5— 1 мм. Якорь является вращающейся частью электродвигателя. Он также набирается из штампованных тонких листов стали.
В сердечнике якоря имеются пазы, куда закладывается обмотка, которая соединяется с коллектором и через угольные щетки 5 присоединяется к источнику питания через соответствующую пускорегулирующую аппаратуру. Щетки укрепляются в специальных щеткодержателях и при работе машины скользят по гладкой поверхности коллектора. Последний набирается из пластин холоднокатаной электролитической меди, разделенных изоляционными прокладками из миканита (слюда; проклеенная лаком). Часто электродвигатели постоянного тока снабжаются дополнительными полюсами, служащими для уменьшения искрения на коллекторе. Дополнительные полюсы, так же как и главные, крепятся к станине. На них располагается обмотка, включаемая в цепь якоря последовательно. Крупные электродвигатели постоянного тока снабжаются компенсационной обмоткой, которая закладывается в пазы полюсных башмаков (выступающая часть полюсов). Компенсационная обмотка служит для устранения реакции якоря, вызываемой влиянием магнитного потока якоря на основной поток главных полюсов, в результате чего усиливается искрение на коллекторе.

Наибольшее применение для привода механизмов подъемно-транспортных машин получили асинхронные электродвигатели трехфазного тока (рис. 6). Основными частями электродвигателя (рис. 6, а) являются вращающий ротор 2 и неподвижный статор 1, которые набираются из тонких листов электротехнической стали толщиной 0,5 мм. В специально предусмотренных пазах размещаются обмотки 3 статора и 4 ротора. Обмотка статора всегда выполняется трехфазной и может включаться звездой и треугольником (рис. 6, б). Выводы от нее присоединяются к зажимам электродвигателя, к которым с помощью соответствующей пускорегулирующей аппаратуры подается питание от сети.
Различают асинхронные электродвигатели с фазным и короткозамкнутым ротором, на валах которых укрепляется крылатка 7 для охлаждения. У первых обмотка ротора выполняется трехфазной и через кольца 5 и щетки 6 присоединяется к пусковым сопротивлениям. В электродвигателях с короткозамкнутым ротором обмотка ротора состоит из медных, латунных или алюминиевых стержней, помещенных в пазах ротора и замкнутых между собой с его торцов кольцами. Эти стержни могут составлять или одинарную, или двойную «беличью» клетку. В первом случае электродвигатель имеет недостаточно удовлетворительную пусковую характеристику. Более приемлемыми являются двухклеточные асинхронные электродвигатели. У них стержни верхней клетки ротора выполняются из материала с большим удельным сопротивлением (латунь, алюминиевая бронза и т. д.), стержни нижней клетки делаются с малым удельным сопротивлением (красная медь). В момент пуска такого электродвигателя (при подаче трехфазного тока в обмотку статора) ток протекает по стержням верхней клетки, имеющей сравнительно небольшое индуктивное сопротивление в момент пуска и значительное активное сопротивление. Это равноценно введению пускового реостата в роторную цепь и приводит к уменьшению пускового тока и увеличению пускового момента. После разгона электродвигателя, когда частота тока в обмотке ротора упадет, ток протекает по стержням нижней клетки, имеющей небольшое активное сопротивление.
Аналогично работают электродвигатели с глубоким пазом, обладающие повышенными пусковыми моментами по сравнению с обычными электродвигателями. Так, у электродвигателей с нормальным короткозамкнутым ротором отношение пускового момента к номинальному составляет 0,8—1,3 при значительном пусковом токе (5?7 I н ), электродвигатели же с двойной клеткой или глубоким пазом могут развивать двукратный пусковой момент при меньшем пусковом токе. Это позволяет широко применять их для привода электроталей, кранбалок, лифтов и машин непрерывного транспорта. Обычные же асинхронные электродвигатели с короткозамкнутым ротором из-за трудностей с регулированием скорости применяются в подъемно-транспортных машинах очень редко. Механизмы кранов и других портовых подъемно-транспортных машин приводятся асинхронными электродвигателями с фазным ротором.