
Влияние параметров электросети на работу двигателей насосов
Влияние параметров электросети на работу двигателей насосов

Стремительное развитие электротехнической отрасли ознаменовало конец эры паровых машин и начало повсеместного распространения электрических. Электрические насосы относятся к одним из самых востребованных механизмов нашего времени. Здесь и далее под термином «насос» подразумевается весь механизм в целом — двигатель, передаточный механизм (редуктор или другое устройство, выполняющее его функции) и исполнительный орган (крыльчатка, лопасти, поршень).
Электродвигатели, лежащие в основе насосов, обладают очень высоким КПД (83-95%), относительной простотой конструкции, универсальностью и высокой надежностью. Тип применяемого двигателя и режим его работы в большой степени определяет итоговые характеристики любого электрического механизма.
В большинстве случаев, если нет особых требований, применяют асинхронные двигатели с короткозамкнутым ротором. Схематично такой двигатель состоит из корпуса, в котором расположены статор (неподвижная часть) с обмоткой и ротор (вращающаяся часть). Напряжение, подведенное к обмотке статора, создает вращающееся магнитное поле, взаимодействие которого с обмоткой ротора и заставляет последний вращаться. Обмотка в электродвигателях представляет собой особым образом намотанную на металлический каркас медную проволоку, покрытую изолирующим витки лаком.
И если электрический двигатель является сердцем электронасоса, то электроэнергия — душой. Без неё насос попросту не будет работать. Электроэнергия характеризуется качеством, то есть все её параметры должны соответствовать расчетным. В случае, когда какой-либо параметр выходит за установленные стандартом границы, изменяется и режим работы насоса. Основными характеристиками электроэнергии являются значения напряжения, его формы и частоты (для переменного тока). В каждой стране есть свои стандарты для вышеуказанных параметров. Напряжение — это электродвижущая сила, разность потенциалов, или, если просто, это та энергия, которая высвобождается при перемещении заряда между двумя точками.
Согласно ГОСТ, для стран СНГ принято напряжение (U) 220 Вольт +-10%. Частота (Ω) определяет, как часто за единицу времени изменяется полярность напряжения. Стандартным значением является 50 Герц +-1%. К основным параметрам насосов относятся напор, подача и рабочая точка, объединяющая эти два параметра. Напор — это давление жидкости, создаваемое насосом, а подача — её количество, перекачиваемое за единицу времени. А так как принцип работы всего механизма заключается в преобразовании энергии вращения, производимой двигателем, в работу, совершаемую исполнительным органом, то важно обеспечить стабильность расчетной скорости вращения. Одной из важнейших характеристик асинхронного электродвигателя является скольжение. Скольжение — это разница в скоростях вращения магнитного поля, создаваемого обмоткой статора и самого ротора. Чем больше нагрузка или меньше напряжение, тем выше величина скольжения.
Взаимосвязь скорости вращения ротора и напряжения сети выражается формулой:
N=Nсинхр*(1-Kнагр*Uрез*Sном); где:
«N» — результирующая скорость вращения двигателя насоса,
«Nсинхр» — синхронная скорость вращения ,
«Kнагр» — коэффициент нагрузки двигателя,
«Uрез» — отношение квадратов значений номинального напряжения к фактическому,
«Sном» — значение скольжения в номинале.
Значит, при уменьшении сетевого напряжения ниже номинального, также уменьшается скорость вращения ротора двигателя и, как следствие, общая производительность насоса. Важно отметить, что данное следствие верно для двигателей насосов, работающих с полной нагрузкой. Если же насос выбран с «запасом», то влияние уменьшения напряжения проявляется не так заметно.
Видео ролик: «Работа частотного преобразователя Speedrive»
Следующим негативным проявлением понижения является нагрев обмоток. При уменьшении напряжения ниже допустимого на 1% магнитный поток в двигателе уменьшается на 3%. В общем случае, для мощности двигателя можно воспользоваться формулой:
P = U*I, где:
«P» — мощность двигателя,
«U» — напряжение сети,
«I» — ток, потребляемый двигателем.
Следовательно, при сохранении значения электрической мощности двигателя и падении напряжения, увеличивается потребляемый из сети ток. Превышение значения тока сверх расчетных параметров вызывает повышенный нагрев обмоток и, как следствие, уменьшение срока эксплуатации их изоляции. В некоторых случаях возможен выход двигателя из строя. Повышение напряжения выше номинального значения уменьшает срок службы двигателя и при чрезмерном завышении, происходит «электрический пробой» изоляции обмоток. В этом и вышеуказанных случаях говорят, что «двигатель сгорел».
Скорость вращения магнитного поля и, как следствие, скорость вращения ротора двигателя зависит от частоты сети. Эта зависимость описывается формулой:
n= 60*f / P, где:
«n» — синхронная скорость вращения магнитного поля,
«f» — частота электросети,
«P» — количество пар полюсов обмотки статора (механический параметр).
Следовательно, при постоянном количестве пар полюсов любое изменение частоты непосредственным образом влияет на вращения двигателя и развиваемую им механическую мощность. К особому типу насосов относятся вибрационные или шнековые. В их конструкции нет двигателя в классическом понимании, поэтому поломки, вызванные завышенным или заниженным напряжением проявляются немного иначе. Если такой насос установлен в колодце или скважине и при нормальном напряжении работает в своих номинальных параметрах, без «запаса» по мощности, то при падении напряжения он не сможет поднять воду, что для некоторых моделей чревато выходом из строя. А при завышении напряжения интенсивность движения качающей мембраны возрастает и механизм постепенно разбивает сам себя. Тот же эффект проявляется, соответственно, при понижении и повышении частоты сети.
Качественный насос приобретается с учетом долгой продолжительной работы без поломок — «поставил и забыл». Цена такого решения, обычно, соответствующая. Поэтому верным решением будет принять меры для защиты насоса от возможных изменений параметров электрической сети. К одному из вариантов относится подключение насоса к устройству, осуществляющему контроль и регулирование напряжения — стабилизатору. Стабилизатор подбирается по мощности с 20-30% запасом. Запас необходим с учетом более высокой потребляемой мощности в момент каждого включения электродвигателя. Более широкие возможности защиты насоса осуществляют блоки управления с частотным регулированием.
Что такое скольжение электрического двигателя
Главное меню
- Главная
- Паровые машины
- Двигатели внутреннего сгорания
- Электродвигатели
- Автоматическое регулирование двигателей
- Автоматические регуляторы непрямого действия
- Автоматические регуляторы прямого действия
- Автоматическое регулирование
- Двигатель как регулируемый объект
- Угол опережения впрыска топлива в двигателе
- Автоматическое регулирование температуры в системах охлаждения и смазки двигателя
- Регулируемый наддув в двигателе
- Установка автоматического регулятора угловой скорости в двигателе
- Установка на двигателях автоматических регуляторов и устройств
- Дифференциальное уравнение дизеля без наддува
- Дифференциальное уравнение дизеля с автономным газотурбинным наддувом
- Расчет циклов подачи топлива
- Дифференциальное уравнение выпускного коллектора
- Дифференциальное уравнение впускного коллектора
- Дифференциальное уравнение турбокомпрессора
- Передаточная функция двигателя
- Дифференциальное уравнение двигателя
- Переходные процессы в работе двигателя
- Неустановившиеся режимы работы двигателей
- Устойчивость режимов работы двигателей
- Выработка энергии двигателем для потребителей
- Статические характеристики двигателя
- Режимы работы двигателя
- Схема комбинированного двигателя
- Особенности двигателя как регулируемого объекта
- Двухимпульсные автоматические регуляторы
- Динамические свойства элементов системы двигателя
- Компоновка регулятора с двигателем
- Параллельная работа двигателя
- Переходные процессы в системах авто. регулирования
- Синтез систем автоматического регулирования
- Системы автоматического регулирования двигателей
- Устойчивость систем автоматического регулирования
- Восстановление и ремонт двигателей СМД
- Топливо для двигателей
- Карта сайта
Судовые двигатели
- Судовые двигатели внутреннего сгорания
- Судовые паровые турбины
- Судовые газовые турбины
- Судовые дизельные установки
В современной электроэнергетике почти повсеместно переменный ток вытесняет постоянный. Это объясняется многими преимуществами машин переменного тока в сравнении с машинами постоянного тока. В частности, у машин переменного тока вес, габариты и стоимость меньше, а к. п. д. выше; они проще в обслуживании, долговечнее и надежнее машин постоянного тока. Правда, электродвигатели переменного тока хуже поддаются регулировке, они развивают значительно меньшие пусковые моменты. Поэтому, если от электродвигателей требуются высокие регулировочные качества и повышенные пусковые моменты, применяют электродвигатели постоянного тока.
Привод механизмов портовых подъемно-транспортных машин чаще всего осуществляется асинхронными электродвигателями трехфазного переменного тока, получившими наибольшее распространение в электроэнергетике. Зависимости от исполнения ротора, различают асинхронные электродвигатели с короткозамкнутым ротором и с фазным ротором (с контактными кольцами). Принципиальная схема включения этих электродвигателей приведена на рис. 40..
Из курса электротехники известно, что принцип действия асинхронных электродвигателей основан на использовании так называемого вращающегося магнитного поля. При подаче трехфазного тока в обмотке статора создается магнитное поле, вращающееся со скоростью

где f— частота тока в обмотке статора;
р — число пар полюсов обмотки статора.
Эта скорость называется синхронной. Магнитное поле статора, (пересекая обмотку ротора, наводит в ней э. д. с., которая создает в цепи ротора ток. Последний, взаимодействуя с магнитным полем статора, образует вращающий момент, заставляющий ротор вращаться в ту же сторону, что и магнитное поле статора. При нормальной работе асинхронного электродвигателя его ротор вращается со скоростью п 2 1 . Если бы скорость вращения ротора была равна скорости, с которой вращается магнитное поле статора, то последнее относительно ротора было бы неподвижным. В этом случае э. д. с. и ток в обмотке ротора были бы равны нулю и никакого вращающего момента не возникло бы.

Величиной, характеризующей работу асинхронного электродвигателя, является скольжение s :

где n 1 —синхронная скорость;
n 2 — скорость вращения ротора.
Зная скольжение, нетрудно определить скорость вращения электродвигателя

При работе электродвигателя без нагрузки скорость его близка к синхронной, а скольжение очень мало.
Двигательный режим асинхронного электродвигателя имеет место при скольжениях, изменяющихся в пределах от 0 до 1, при этом число оборотов ротора изменяется от n 1 до 0. Номинальная величина скольжения асинхронного электродвигателя составляет 0,03—0,1, причем первая цифра относится к более мощным, а вторая — к менее мощным электродвигателям (до 10—20 квт).
Очевидно, s = 0 в том случае, когда ротор вращается с синхронной скоростью n 1 . Можно считать, что на холостом ходу электродвигателя его ротор вращается с этой скоростью, если не учитывается трение.
Величина скольжения s =1, когда ротор электродвигателя не вращается при включенной обмотке статора. Этот режим называют режимом короткого замыкания электродвигателя (или режимом стоянки под током). Получить режим короткого замыкания можно, искусственно затормозив ротор или перегрузив электродвигатель до полной остановки его. Пуск асинхронного электродвигателя также начинается именно с этого режима.
Выражение (81) показывает, что скольжение может изменяться гораздо в больших пределах, чем указано выше. Действительно, ротор электродвигателя под действием постороннего источника механической энергии (например, под действием опускающегося груза) может вращаться со скоростью больше синхронной. В этом случае скольжение будет отрицательным (s 2 >n 1 .
Можно также представить, что ротор электродвигателя под действием опускающегося груза вращается в направлении, противоположном направлению вращения магнитного поля статора. В этом случае s>1, так как в выражение (81) величину п 2 нужно подставить с отрицательным знаком. Такой режим называется режимом противовключения.
Таким образом, теоретически скольжение асинхронного электродвигателя может изменяться в пределах от —? до + ?. Практически же скольжение асинхронного электродвигателя при работе последнего в двигательном и тормозных режима« изменяется в пределах от —2 до +2.
Из курса электрических машин известно, что для асинхронного электродвигателя может быть составлена схема замещения, с помощью которой производится анализ работы электродвигателя и исследуются режимы его работы. На рис. 41 приведена упрощенная схема замещения асинхронного электродвигателя, в которой приняты следующие обозначения:
U 1 — фазное напряжение обмотки статора, в;
I 1 — фазный ток обмотки статора, а;
I — фазный ток холостого хода электродвигателя, а;
I 2 — приведенный фазный ток обмотки ротора, а;
r 1 и х 1 — активное и индуктивное сопротивления фазы обмотки статора, ом;
r 2 ’ и х 2 ‘ — приведенные активное и индуктивное сопротивления фазы обмотки ротора, ом.
Для приведенных величин могут быть выведены следующие соотношения:

где т 1 и т 2 — число фаз обмоток статора и ротора;
к = U 1н / E 2н — коэффициент трансформации э. д. с. (U 1н — номинальное фазное напряжение обмотки статора; E 2н — фазная э. д. с. обмотки ротора при разомкнутых контактных кольцах).

Мощность Р 1 забираемая электродвигателем из сети, определяется напряжением сети U 1 , током статора I 1 зависящим от нагрузки, и коэффициентом мощности cos? т.е.

Мощность на валу электродвигателя зависит от его к. п. д.? и может быть вычислена по формуле

Если пренебречь механическими и вентиляционными потерями, которые незначительны, то можно считать, что механическая мощность асинхронного электродвигателя (мощность на валу) равна, потерям мощности в сопротивлении  схемы замещения, приведенной на рис. 41, т. е.
схемы замещения, приведенной на рис. 41, т. е.

где т 2 = т 1 — приведенное число фаз обмотки ротора.
Между токами асинхронного электродвигателя, согласно схеме замещения, существует зависимость

Ток статора асинхронных электродвигателей I 1 очень велик даже при отсутствии нагрузки на валу. Это объясняется тем, что намагничивающий ток этих электродвигателей составляет 50—70% номинального тока статора.
Большая Энциклопедия Нефти и Газа
Скольжение — электродвигатель
В трубопрофильных прессах с индивидуальным гидроприводом для регулирования скорости могут применяться разомкнутые системы, так как скорости прессования жестко регулируются числом включенных насосов и изменяются лишь в результате скольжения электродвигателей , приводящих насосы, утечек масла через уплотнения в цилиндрах, распределительной гидроаппаратуре и трубопроводах. Изменение скорости прессования из-за всех указанных факторов не превышает 5 % и вследствие этого в расчет не принимается. [31]
Центровку и балансировку агрегата, снятие, ремонт и установку соединительных муфт ( полумуфт электродвигателя и механизма) и выносных подшипников ( включая подшипники, установленные на наружной части торцевых щитов, а также в грузо-несущих крестовинах двигателей вертикального исполнения); ремонт вкладышей подшипников скольжения электродвигателей , фундаментов и рамы, масляной системы ( при принудительной смазке подшипников), устройств подвода воздуха, а также воды к воздухоохладителям, обмоткам и другим элементам электродвигателя; охладителей, не встроенных в статор электродвигателей, должен производить персонал цеха, обслуживающего приводимый механизм, или персонал подрядной организации, производящей ремонт оборудования на данной электростанции. [32]
FmaX ( 10 14) — 10 3 Н ]; р — давление прессования, Па ( зависит от влажности шерсти, плотности прессования, порядкового номера рабочего хода цикла; р — 15 — ь 35 Па); S — площадь прессующей плиты, м1; v — скорость прессующей плиты при номинальном скольжении электродвигателя на последнем рабочем ходе цикла прессования, м / с ( для существующих прессов лежит в пределах 0 2 — 0 8 м / с); цк Мк / Мтах, предполагается, что на завершающей стадии последнего хода прессующей плиты, длительность которого около Юс наибольший момент на валу двигателя Мтах не превосходит критического Мк при увеличении скольжения электродвигателя до sK; kx — коэффициент, учитывающий допустимое отклонение максимального вращающего момента электродвигателя от номинального; k % — коэффициент, учитывающий изменение момента электродвигателя из-за допускаемого отклонения напряжения питания двигателя; k3 — коэффициент запаса; т) п — КПД передачи. [33]
Расчет зависимости скольжения электродвигателя от времени при произвольном характере изменения напряжения производится графоаналитическим методом. [34]
Работоспособность электрических машин зависит от технического состояния подшипников. Максимально допустимые зазоры в подшипниках скольжения электродвигателей даны в паспортах. [35]
Таким образом, в данном приводе частота вращения регулируется путем увеличения или снижения давления колодок на тормозной шкив. Регулирование осуществляется автоматически, в функции скольжения электродвигателя механизма , а результирующие механические характеристики 1ПТ при подъеме и 1СТ при спуске ( см. рис. 93, б) обеспечивают пониженную частоту вращения механизма. [36]
Эта прямая имеет некоторый наклон в сторону больших скольжений, так как при увеличении нагрузки асинхронного двигателя его скольжение возрастает. В точке Ь момент сопротивления насоса и скольжение электродвигателя достигают номинальной величины и насос развивает номинальную производительность. [37]
При построении характеристик электродвигателей с двумя обмотками на роторе обычно не считаются с влиянием эффекта вытеснения тока в пределах каждой обмотки. Однако вследствие изменения распределения тока ротора между двумя обмотками с изменением скольжения электродвигателя эквивалентное активное сопротивление и эквивалентная реактивность рассеяния обеих обмоток ротора оказываются зависящими от скольжения. [38]
При этом обмотка ротора пересекается силовыми линиями магнитного поля статора и в ней возникают токи, величина которых зависит от этого тормозящего действия. Разница между частотой вращения магнитного поля статора яст и частотой вращения ротора р называется скольжением электродвигателя . [39]
Эти станы имеют, как правило, регулировочный асинхронный двигатель, который посредством жидкостного регулятора должен обеспечивать быстрое изменение скольжения электродвигателя ( до 12 %) при толчках нагрузки. Сближение электродов жидкостного регулятора при пуске должно быть отрегулировано таким образом, чтобы ток асинхронного двигателя не превосходил допустимой величины. [40]
Весьма важен также вопрос об издержках потребителей. Оптимизация режима системы предполагает варьирование напряжениями в узловых точках сети. С изменением напряжения меняется скольжение электродвигателей , а значит, и производительность приводимых ими машин-орудий, меняется быстрота износа двигателей и, кроме того, меняется ( при других неизменных условиях) потребляемая активная мощность. [41]
Плохая организация смазочного хозяйства ведет к преждевременному износу машин и к систематическим простоям в связи с аварийными ремонтами, во время которых производится ремонт не только поврежденного узла вал-подшипник, но и целого ряда других узлов. Восстановление машин после аварийных ремонтов, связанных с отсутствием надлежащей смазки, не всегда возможно. Например, при подшипниках скольжения электродвигателя отсутствие масла в подшипнике приводит к такому износу, при котором pofop задевает з-а статор. Повреждается не только обмотка, но и железо ротора и статора электродвигателя. Двигатель при этом полностью выходит из строя. [42]
В дальнейшем необходимо связать скольжение электродвигателя с показателями несимметрии напряжения для оценки влияния непосредственно несимметричного или неполнофазного режима работы на указанные ранее показатели. Так как известно значимое влияние величины скольжения электродвигателя на его сопротивления, то сначала необходимо связать скольжение электродвигателя с сопротивлениями каждой последовательности. [43]
В дальнейшем необходимо связать скольжение электродвигателя с показателями несимметрии напряжения для оценки влияния непосредственно несимметричного или неполнофазного режима работы на указанные ранее показатели. Так как известно значимое влияние величины скольжения электродвигателя на его сопротивления, то сначала необходимо связать скольжение электродвигателя с сопротивлениями каждой последовательности. [44]
Скольжение асинхронного двигателя — что это такое и как найти

В процессе взаимодействия магнитного поля и тока в роторе асинхронного электродвигателя создается вращающий момент, который позволяет уровнять скорость статора, ротора и вращения электромагнитного поля. Величина скольжения электродвигателя характеризуется скоростью вращения ротора, статора и магнитного поля.
Режим холостого хода
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода, при котором , что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы асинхронного двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
От чего зависит величина скольжения электродвигателя
- Как правило, скольжение относительно невелико при работе электродвигателя с номинальной нагрузкой. Например, при работе электромотора 1500 оборотов в минуту скольжение равно 2,7%.
- Асинхронные электродвигатели не могут достичь синхронной скорости даже, если отсоединить механизм. Проводники ротора никогда не будут пересекаться с магнитным полем, в них не будет ЭДС, соответственно не будет и тока. При этом асинхронный момент будет равен нулю.
- В момент пуска в обмотку ротора поступает ток, соответствующий частоте сети. По мере ускорения частота тока будет определена скольжением. При этом сопротивление ротора будет зависеть от частоты тока. Индуктивное сопротивление будет возрастать по мере увеличения частоты тока.
- Величины эквивалентного сопротивления изменяются в соответствии с законами физики. Если скольжение электродвигателя уменьшается, сопротивление соответственно увеличивается.
- При пусковом моменте до развития скольжения в пределах 0,15 сила сопротивления уменьшается незначительно. При дальнейшей работе наоборот – быстро уменьшается. Величина момента вращения определяется соответствующей величиной магнитного потока, поступающего тока и сдвигом между параметрами ЭДС, тока в роторе. Зависимость момента скольжения и напряжения с частотой устанавливается в ходе проведения исследования технических характеристик производителями электромоторов.
Генераторный режим
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой , то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне , то есть оно может принимать любые отрицательные значения.
От чего зависит величина скольжения электродвигателя
- Как правило, скольжение относительно невелико при работе электродвигателя с номинальной нагрузкой. Например, при работе электромотора 1500 оборотов в минуту скольжение равно 2,7%.
- Асинхронные электродвигатели не могут достичь синхронной скорости даже, если отсоединить механизм. Проводники ротора никогда не будут пересекаться с магнитным полем, в них не будет ЭДС, соответственно не будет и тока. При этом асинхронный момент будет равен нулю.
- В момент пуска в обмотку ротора поступает ток, соответствующий частоте сети. По мере ускорения частота тока будет определена скольжением. При этом сопротивление ротора будет зависеть от частоты тока. Индуктивное сопротивление будет возрастать по мере увеличения частоты тока.
- Величины эквивалентного сопротивления изменяются в соответствии с законами физики. Если скольжение электродвигателя уменьшается, сопротивление соответственно увеличивается.
- При пусковом моменте до развития скольжения в пределах 0,15 сила сопротивления уменьшается незначительно. При дальнейшей работе наоборот – быстро уменьшается. Величина момента вращения определяется соответствующей величиной магнитного потока, поступающего тока и сдвигом между параметрами ЭДС, тока в роторе. Зависимость момента скольжения и напряжения с частотой устанавливается в ходе проведения исследования технических характеристик производителями электромоторов.
Определение величины скольжения электродвигателя
Предопределяющим моментом в прямой зависимости от скольжения является начальное значение того момента, когда электродвигатель остается еще в неподвижном состоянии. Максимальное значение скольжения называется критическим.
Конкретные расчеты производят специалисты завода-изготовителя, и они указаны в соответствующих технических характеристиках, прилагаемых к электродвигателю при покупке. При увеличении активного сопротивления только ротора увеличивается значение критического скольжения и уменьшается скорость вращения вала. Изменить данные параметры можно путем использования дополнительного сопротивления, которое вводится в цепь обмотки ротора.
Как известно, ротор асинхронного двигателя вращается в ту же сторону, что и магнитное поле со скоростью, несколько меньшей скорости вращения поля, так как только при этом условии в обмотке ротора будут индуцироваться ЭДС и токи и на ротор будет действовать вращающий момент.
Обозначим скорость вращения поля (синхронная скорость) через а скорость вращения ротора через 2Тогда разность 3называемая скоростью скольжения, будет представлять собой скорость ротора относительно поля, а отношение скорости скольжения к синхронной скорости, выраженное в процентах, называют скольжением 4
Выразим скольжение s через угловые скорости вращения поля и ротора

Полученные выражения подставим в формулу скольжения (5.7)
Выясним влияние скольжения на мощность, развиваемую двигателем.
Пусть мощность, потребляемая двигателем, мощность, развиваемая ротором при его вращении. Тогда
длина окружности ротора, R — его радиус, и — силы, действующие на ротор (соответственно электромагнитная и механическая). Тогда
Взяв отношение получим:

но (обе силы электромагнитные и в установившемся режиме вращения действие равно противодействию), тогда
откуда окончательно имеем:
Из полученного соотношения следует, что мощность развиваемая ротором асинхронного двигателя, зависит от скольжения 5.
Если скольжение выражать в процентах, то от мощности потребляемой двигателем из сети, преобразуется в механическую мощность, а остальные мощности расходуются на покрытие потерь в двигателе, поэтому для получения высокого КПД двигателя скольжение необходимо делать возможно меньшим.
На практике у двигателей мощностью от 1 до 1000 кВА при номинальной нагрузке скольжение составляет 3-6%, а при больших мощностях — 1-3%. Так, при скоростях вращения магнитного поля 3000, 1500 и 1000 об/мин скорости вращения ротора обычно имеют соответственно значения 2800,1410 и 930 об/мин.
37. Регулирование частоты вращения асинхронных двигателей
Частота вращения асинхронного двигателя
n = n 1 (1 – s) = (60f 1 /p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f 1 питающего напряжения, число пар полюсов р и
Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу М вн и частоты f 1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n 1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n 1 , то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n 1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
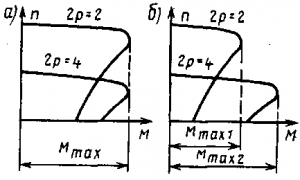 Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
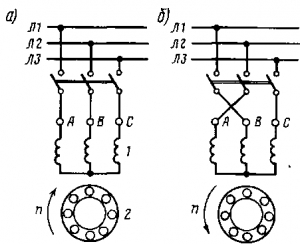 Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения

