Пуск двигателя с фазным ротором
Пуск двигателя с фазным ротором
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению s п= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
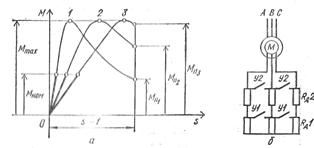
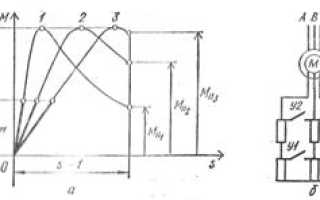
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток I п = (4,5 — 7) I ном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.

Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1 , а, кривая 3), если критическое скольжение двигателя с фазным ротором
s кр = ( R2′ + R д ‘) / ( Х1 + Х2 ‘) = 1 ,
где R д ‘ — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 — 0,4) M ном, нормальным, если Мп — (0,5 — 0,75) Мном, и тяжелым при Мп ≥ Мном.
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85 Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.

Переключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1 , t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 — 2,5) I ном и ток переключения I 2, который должен обеспечить момент переключения М 2 > М c .
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
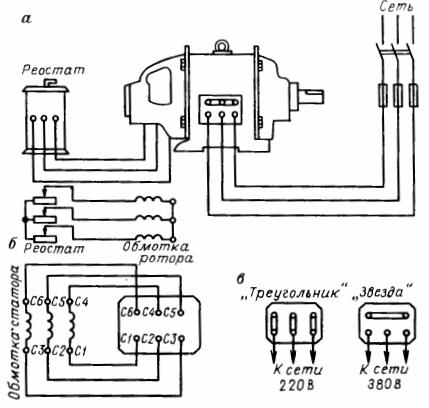
Рис. 3. Схема соединения обмоток двигателя с фазным ротором: а — к питающей сети, б — ротора, в — на доске зажимов.
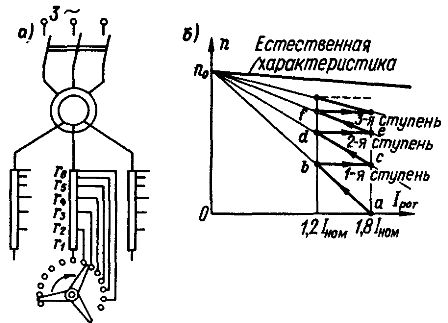
Рис. 4. Пуск двигателя с фазным ротором: а — схема включения, б — механические характеристики
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Модернизация системы частотно-регулируемого асинхронного электропривода
Полный текст:
- Статья
- Об авторах
- Cited By
Аннотация
Ключевые слова
Для цитирования:
Шестаков И.В., Сафин Н.Р. Модернизация системы частотно-регулируемого асинхронного электропривода. Вестник Концерна ВКО «Алмаз – Антей». 2019;(2):25-33. https://doi.org/10.38013/2542-0542-2019-2-25-33
For citation:
Shestakov I.V., Safin N.R. Modernization of a frequency-controlled asynchronous electric drive system. Journal of «Almaz – Antey» Air and Space Defence Corporation. 2019;(2):25-33. https://doi.org/10.38013/2542-0542-2019-2-25-33
Современный частотно-регулируемый асинхронный электропривод (ЧРАП) широко применяется в изделиях военной техники (ВТ) и конверсионной гражданской техники (ГТ). Для изделий первой категории предъявляют жесткие требования к условиям эксплуатации (согласно комплексам государственных военных стандартов «Климат-6» и «Мороз-7»). В изделиях ВТ электропривод часто функционирует в условиях термонагруженного отсека, что усложняет задачу снижения тепловыделения и рассеивания теплоты. Требования по обеспечению гарантийной работоспособности приводного/рабочего механизма связаны в том числе и с повышением энергоэффективности ЧРАП. Такая задача в первую очередь зависит от степени минимизации потерь в компонентах электропривода, приводящих к снижению КПД и повышенному энергопотреблению. Исходя из этого задача повышения энергоэффективности ЧРАП в таких условиях является актуальной.
Объект данного исследования — частотно-регулируемый электропривод переменного тока, в силовой цепи которого используется трехфазный асинхронный двигатель (АД) с короткозамкнутым ротором, получающим питание от преобразователя частоты (ПЧ) — силового контроллера с широтно-импульсной модуляцией (ШИМ).
Цель работы — исследование возможностей повышения энергоэффективности ЧРАП электрогидравлической трансмиссии самоходного грузоподъемного агрегата. Статья является продолжением работ [1, 2].
Один из вариантов решения данной задачи — совершенствование существующих и разработка новых типов электродвигателей и полупроводниковых преобразователей с улучшенными энергетическими характеристиками.
В области электромашиностроения отечественная промышленность освоила производство нескольких серий асинхронных двигателей общего назначения (АИ, 5А), которые имеют более высокие КПД и коэффициент мощности. Например, в ОАО «РУСЭЛПРОМ» разработаны специальные крановые двигатели серий 5МТК и 7МТК для частотно-регулируемого электропривода. Усовершенствованные технологии изготовления обмотки статора и конструкция магнитопровода обеспечивают надежную эксплуатацию электродвигателей при питании от автономных инверторов напряжения (АИН) и возможность регулирования частоты вращения в широком диапазоне.
Сегодня успехи в развитии микропроцессорных средств управления позволяют решать практические задачи повышенной сложности: идентификация параметров, оценка переменных состояния, адаптивное и оптимальное управление. Одним из важных направлений в теории и практике регулируемого электропривода остается разработка электроприводов, которые обеспечивали бы технологические процессы при минимальных энергетических затратах.
Практически допустимые области функционирования ЧРАП определяются в том числе и законом частотного управления , а также качеством его реализации в системе регулирования.
В настоящее время существуют разные типы управления АД, реализуемые в ПЧ на основе скалярных и векторных систем управления. В свою очередь векторное управление подразделяется на два основных вида: с прямой ориентацией по полю ротора (с датчиком положения ротора, датчиком скорости, датчиком магнитного потока в воздушном зазоре) и с косвенной ориентацией по полю ротора (без- датчиковое/бессенсорное).
Соответственно векторное управление с косвенной ориентацией по полю ротора позволяет исключить использование датчика скорости (и датчиков других типов), но данный вариант имеет следующие неблагоприятные особенности:
- в режиме малого скольжения, т. е. при работе электродвигателя на низких скоростях, снижается качество регулирования скорости [3];
- усложняется и удорожается программно-аппаратная часть электропривода.
Использование датчика скорости в определенной степени снижает надежность ЧРАП ввиду влияния комплекса физико-химических и климатических факторов широкого диапазона, например в условиях ограниченного термонагруженного пространства с вибро-, тепловыделяющим оборудованием. Кроме того, датчики скорости (энкодеры) в крановом электроприводе являются наименее надежными элементами, выход их из строя происходит достаточно часто [4]. С учетом всего этого в системе управления ЧРАП реализован скалярный принцип частотного управления.
Одновременно с этим выбор АД для работы в регулируемом электроприводе является важным фактором, влияющим на надежность эксплуатации приводного/рабочего механизма. В данной статье рассматривается новый тяговый АД (получен патент РФ на полезную модель № 184734) с характеристиками: номинальная мощность PN = 15 кВт; номинальное фазное напряжение UN = 127 В; номинальный фазный ток IN = 50,38 А; частота питающего напряжения fN = 400 Гц; КПД ηΝ = 0,8651; коэффициент мощности cos φ N = 0,8351; число пар полюсов z p = 4; относительное скольжение s = 0,0269; скорость вращения ротора Ω2 = 611,42 рад/c. Электродвигатель изготовлен для работы в жестких условиях при влиянии различных негативных факторов. Для повышения надежности электродвигателя его конструктивная часть включает в том числе охлаждающий контур с охлаждающими каналами, проходящими через ротор в осевом направлении. Принятые решения позволяют улучшить циркуляцию внутреннего воздуха и тем самым усовершенствовать схему теплопередачи.
Питание АД от ПЧ не улучшает энергетические показатели системы ЧРАП непосредственно. Наоборот, потери электродвигателя, питаемого от инвертора с ШИМ напряжением, выше, чем у электродвигателя, питаемого от сети. Это обусловлено как снижением действующего напряжения в номинальном режиме, так и увеличенными электрическими и магнитными потерями из-за влияния коммутационной составляющей тока и высших гармоник поля статора [5].
Таким образом, эксплуатация ЧРАП сопровождается рядом негативных факторов: возникновение высших гармоник питающего напряжения, вызывающих импульсные перенапряжения в обмотке статора; повышенные потери, снижающие КПД, полезную мощность АД и увеличивающие нагрев; дополнительные инерционные моменты, увеличивающие вибрацию и шум.
В связи с этим для количественной оценки предлагается проведение сравнительного математического моделирования конкретного АД при питании от сети и от ПЧ. Моделируется режим прямого пуска АД до скорости идеального холостого хода (Ω0N = 628,3 рад/с) с последующим набросом активной нагрузки Mc = 24,6 Н-м, при этом скорость снижается до Ω2 = 611,4 рад/с (относительное значение номинальной скорости ротора ω 2 = 1 — s = 0,9731).
Проведен ряд экспериментов на математической модели АД при питании от сети (рис. 1), в которых снимались значения скорости вращения вала, действующие значения токов и электрических потерь в обмотках статора и ротора. Результаты приведены в табл. 1.

Рис. 1. Математическая модель АД при питании от сети в пакете MATLAB Simulink
Соединение типа звезда и треугольник для электродвигателей
На сегодняшний день данная тема особо актуальна, и в интернете можно найти массу вопросов по ней. Ответов тоже много, но некоторые из них на гранью фантастики. Поэтому мы решили пошагово и точно рассказать о соединении обмоток электродвигателя так исходя из своей практики.
Для начала вкратце вспомним действие асинхронного электродвигателя. Подключают его сети с трехфазным переменным напряжением. В статоре есть 3 обмотки, сдвинутые по отношению друг к другу на 120 электроградуса. Все это необходимо для того. Чтобы возникло вращающееся магнитное поле.

Выводы обмоток статора обозначают так:
- С1, С2, С3 – начала обмоток,
- С4, С5, С6 – конец обмоток.
Указанное обозначение является стандартным, но сегодня появились новые маркировки выводов, которые соответствуют ГОСТу 26772-85:
- U1, V1, W1 — начала обмоток,
- U2, V2, W2 – конец обмоток.
Выводы фазных обмоток асинхронного двигателя выводят на клеммник или колодку и размещают так, чтобы при подключении использовать специальные перемычки и не перекрещивать провода.
Клеммник в основном стараются прикреплять сверху или, если не получается, сбоку. Иногда если тип клеммника позволяет его можно развернуть на 180°, чтобы осуществление подводки питающих кабелей было удобней.
На клеммник можно вывести 3 или 6 выводов фазных обмоток статора.

Рассмотрим каждую ситуацию отдельно.
Соединение звездой
Концы трех обмоток соединяем в одной точке за счет специальной перемычки. На начальные концы обмоток подаем трехфазное сетевое напряжение. Напряжение фазной обмотки должно составить 220 (В), а линейное напряжение между двумя фазными обмотками — 380 (В).

Соединение треугольником
Если сеть имеет линейное напряжение уровнем 220 (В), то обмотку статора нужно соединить по схеме треугольник. Пошаговое соединение по типу треугольник фазных обмоток:
- конец обмотки фазы «А» C4 (U2) соединяем с началом обмотки фазы «В» С2 (V1)
- конец обмотки фазы «В» С5 (V2) соединяем с началом обмотки фазы «С» С3 (W1)
- конец обмотки фазы «С» С6 (W2) соединяем с началом обмотки фазы «А» С1 (U1)
Места, где произведено соединение, подключаются к соответствующим фазам питающего трехфазного напряжения.
Линейное напряжение в данном случае должно составлять 220 (В), и на трехфазной обмотке также 220 (В).
На клеммнике при подключении по схеме треугольник обмоток статора асинхронного двигателя специальные перемычки следует установить так:

В представленных примерах при подключении, что по схеме звезда, что треугольник напряжение каждой фазы обмотки асинхронного двигателя составляет 220 (В).
Частный случай
Иногда так бывает, что на клеммник асинхронного двигателя выведено не 6, а 3 вывода. В такой ситуации соединение независимо от вида схемы будет выполняться внутри двигателя с торца. В данном случае подключение к сети можно будет провести только при одном напряжении, которое указано на таблице с технической информацией.
Исходя из полученных данных, мы должны понимать, что асинхронные двигатели средней мощности и выше следует запускать по схеме звезда. При наборе номинальной частоты вращения в автоматическом режиме происходит переключение его на схему треугольника.
Также на основе собственного опыта рекомендуем для асинхронного электродвигателя использовать стеатитовые клеммные колодки, которые позволят надежно и безопасно провести подключение проводов к любой сети. Их можно использовать не только для электродвигателей, но и для оборудования и отдельных нагревательных элементов с повышенным уровнем температуры.

Клеммные колодки КМ имеют керамический корпус и расположенный внутри трубчатый латунный профиль. Наличие резьбовых отверстий позволяет устанавливать шпильки для колодки.
Помимо стеатитовых клеммных колодок для электродвигателей «Элемаг» изготавливает еще несколько разных вариантов колодок обладающих высоким уровнем термостойкости. В разделе товаров на сайте вы можете рассмотреть:
- Стеатитовые клеммники SL;
- Керамические клеммники SD Ceramics;
- Клеммные колодки стеатитовые KMK Ceramica;
- Клеммные колодки фарфоровые Werit;
- Клеммные блоки термостойкие Conta-Clip.
Термостойкие колодки от «Элемаг» широко используют для подключения электротехнического оборудования, т. к. им характерно безопасное использование и удобное проведение соединений. Мы изготавливаем клеммники для температурных нагрузок свыше 100°С. Мы используем для разных типов колодок стеатит, керамику и даже фарфор. Это отличные изоляторы способные выдерживать сверхвысокие температуры, обладают устойчивостью к пробоям тока, не поддаются плавке и горению. Для увеличения защиты мы можем покрывать колодки специальной керамической глазурью.
Корпуса у колодок могут быть закрытыми или открытыми. У первых контакты располагаются внутри корпуса, а у вторых контакты размещены вверху колодки. Для фиксации колодок в корпусе могут быть выполнены специальные отверстия.
У нас в ассортименте вы сможете подобрать и открытые и закрытые колодки на 2, 3, 4, 5 контактов.
Условное графическое обозначение электродвигателей на схеме
Для того чтобы нарисовать электрическую схему, применяют условные графические обозначения всех элементов. Так в упрощенном варианте можно изобразить любой элемент – резистор, конденсатор, электродвигатель и т.д. Они стандартизированы для основных видов элементов, в этой статье мы рассмотрим обозначения электрических двигателей на схеме.
- Графическое обозначение электрических машин
- Двигатели постоянного тока
- Асинхронные машины
- Синхронные машины
- Генераторы
- УГО других видов электрических машин
- Заключение
Графическое обозначение электрических машин
Для схематичного обозначения была разработана специальная система ЕСКД, согласно которой на чертеже можно отобразить любой двигатель. Его представляют в виде окружности, рядом с которой может указываться буквенное обозначение. Например, ДГ — главный двигатель, ДШ — электродвигатель подачи шпинделя станка, ДО — насоса охлаждения и т.п. Рассмотрим, какие УГО стандартизирует система, полный их перечень приведен в ГОСТ 2.722-68
Двигатели постоянного тока
Машины постоянного тока имеют условное обозначение в зависимости от варианта возбуждения. На рисунке представлен электродвигатель постоянного тока с различными вариантами УГО.

Кроме этого, существует множество устройств с дополнительными функциями. Например, реверсивный электродвигатель с двумя обмотками или с параллельным возбуждением и вибрационным регулятором скорости вращения. Ниже приведены УГО таких устройств.

Асинхронные машины
Асинхронные электродвигатели изображаются на чертежах в виде окружности, внутри которой меньшая окружность, отображающая ротор.
 На иллюстрации представлено графическое обозначение асинхронной электрической машины с короткозамкнутым ротором на однолинейной схеме. Для трехфазной сети символическое представление мотора с фазным и короткозамкнутым выполняется подобным образом, отличие состоит лишь в количестве проводов и подключении цепи ротора.
На иллюстрации представлено графическое обозначение асинхронной электрической машины с короткозамкнутым ротором на однолинейной схеме. Для трехфазной сети символическое представление мотора с фазным и короткозамкнутым выполняется подобным образом, отличие состоит лишь в количестве проводов и подключении цепи ротора.

При этом если электродвигатель трехфазный, указывается схема соединения обмоток. Например, соединение звездой обозначается так:

Каждый тип трехфазных асинхронных машин имеет разный вид на чертеже. Ниже приведены варианты графического обозначения двигателей различного исполнения.

Синхронные машины
Синхронные машины по ГОСТ представлены в виде, который указан на нижеприведенной иллюстрации, при этом схема легко читается даже неспециалистом.

Явнополюсная машина с обмоткой на якоре, отображается на схеме в виде двух окружностей, здесь и к наружной, и к центральной подведены провода (к статору и ротору соответственно).
 Если обмотки соединены треугольником, то синхронный электродвигатель будет изображен на чертеже несколько иначе.
Если обмотки соединены треугольником, то синхронный электродвигатель будет изображен на чертеже несколько иначе.

Остальные разновидности УГО типов электродвигателей на схемах представлены с описанием на рисунке ниже.

Генераторы
Обозначение трехфазных генераторов, как и синхронных двигателей, имеет одинаковое графическое начертание. Ниже приведены изображения, которые отображаются на схеме.

УГО других видов электрических машин
Кроме распространенных устройств, применяются специальные, которые также имеют свое обозначение на схеме.

Специальные приборы типа сельсин-датчиков и приемников имеют кроме графического обозначения еще и буквенное описание, что проиллюстрировано на рисунке ниже.

Двигатель–преобразователь имеет изображение на схеме в соответствии с УГО. Его начертание на схеме приведено на иллюстрации.

Здесь представлены устройства, у которых имеется коллекторный узел. Он имеет УГО в виде двух прямоугольников по сторонам окружности.
Заключение
Графическое обозначение электрических машин на схемах выполняется согласно ГОСТ 2.722. При составлении схемы, необходимо руководствоваться данной документацией. В ней описаны все необходимые машины, а также указываются размеры окружности и других элементов рисунка, которые должны быть на чертежах и другие требования к чертежу.
Соловьёв В.А. — Расчёт характеристик трёхфазного асинхронного двигателя
Описание файла
PDF-файл из архива «Соловьёв В.А. — Расчёт характеристик трёхфазного асинхронного двигателя», который расположен в категории «книги и методические указания». Всё это находится в предмете «электротехника (цифровая электроника)» из седьмого семестра, которые можно найти в файловом архиве МГТУ им. Баумана. Не смотря на прямую связь этого архива с МГТУ им. Баумана, его также можно найти и в других разделах. Архив можно найти в разделе «книги и методические указания», в предмете «электротехника (цифровая электроника)» в общих файлах.
Просмотр PDF-файла онлайн
Текст из PDF
Московский государственный технический университетимени Н.Э. БауманаВ.А. СоловьевРАСЧЕТ ХАРАКТЕРИСТИКТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯМетодические указанияк самостоятельной работе студентовпо курсу «Основы электропривода»МоскваИздательство МГТУ им. Н.Э. Баумана2014УДК 621.313Соловьев В.А.Расчет характеристик трехфазного асинхронного двигателя: методические указания к самостоятельной работе студентов по курсам «Электротехника и электроника» и «Основы электропривода» / В.А.
Соловьев. – М.:Изд-во МГТУ им. Н.Э. Баумана, 2014. – 36 с. : ил.В методических указаниях изложены требования к оформлению расчетно-графических работ, содержание задания, основные теоретическиеположения и методические указания к выполнению расчетно-графическойработы по разделу «Асинхронные двигатели», а также программа и примеррасчета этой расчетно-графической работы при помощи математическойсистемы Mahtcad.Для студентов всех специальностей факультетов МТ, СМ, Э.Рекомендовано Учебно-методической комиссией факультета ФНМГТУ им.
Н.Э. Баумана.Рецензентпрофессор кафедры электротехники НИЯУ МИФИ М.В. НемцовВВЕДЕНИЕВ промышленности самыми распространенными электродвигателями являются трехфазные асинхронные двигатели. Это самые простые поконструкции, дешевые и надежные электродвигатели.Электродвигатели преобразуют электрическую энергию в механическую энергию, используемую для приведения в движение рабочие органымашин и управления их движением. Поэтому одной из важных характеристик асинхронного двигателя является механическая характеристика. Онапозволяет сравнить и согласовать механические свойства двигателя и рабочего механизма. Основные свойства асинхронного двигателя, работающего под нагрузкой, определяются также рабочими характеристиками, отражающими зависимость изменения его энергетических показателей от нагрузки на валу.
Возможности регулирования частоты вращения асинхронного двигателя показывают его искусственные механические характеристики, получаемые при изменении его параметров и параметров источникапитания.Электродвигателями потребляется более половины производимой вмире электроэнергии. Из них почти 80%, в большей части асинхронныедвигатели, эксплуатируются в составе нерегулируемых электроприводов изагружены в среднем на 50%.
При таких условиях работы энергетическиепоказатели электродвигателей значительно ниже номинальных, что приводит к непроизводительному расходу электроэнергии. Применение регулируемого электропривода позволяет улучшить не только качественные показатели производственного оборудования, но и повысить эффективностьиспользования потребляемой асинхронными двигателями энергии, достигаемой в результате увеличения, т.е. коррекции, их коэффициента мощности.Для реализации возможностей регулирования частоты вращенияасинхронных двигателей и экономии потребляемой ими электроэнергиинеобходимо уметь рассчитывать и анализировать их основные характеристики и энергетические показатели.
Методика их расчета, рекомендованная ГОСТ, основывается на использовании параметров эквивалентнойэлектрической схемы замещения асинхронного двигателя и применяется ввыполняемой расчетно-графической работе.Цель выполнения расчетно-графической работы – ознакомлениес методиками расчета по электрической схеме замещения асинхронногодвигателя его естественных механической и рабочих характеристик, искусственных механических характеристик при изменении параметровэлектродвигателя и источника электропитания, а также обоснования технической целесообразности применения энергосберегающего регуляторанапряжения питания асинхронного двигателя при его длительной работепо условиям эксплуатации с малой нагрузкой.3Порядок выполнения и оформлениярасчетно-графических работРасчетно-графические работы по курсу «Электротехника и электроника» способствуют закреплению теоретических знаний и практическихнавыков, полученных при изучении учебников и выполнении лабораторных работ.Для успешного выполнения расчетно-графических работ необходимо:1.
Изучить соответствующие разделы учебников и учебных пособий.2. Изучить методические указания к выполнению расчетнографической работы.3. Разобрать типовые примеры, приведенные в учебниках и методическом пособии по теме расчетно-графической работы.Расчетно-графические работы выполняются индивидуально каждымстудентом.Номер варианта расчетно-графической работы соответствует номеруфамилии студента по списку в групповом журнале.Расчетно-графическая работа выполняется на листах формата А4 наодной стороне листа.
Титульный лист оформляется в соответствии с общепринятой формой. Исходные данные приводятся на первой странице расчёта. Расчёт сопровождается пояснительными надписями.Все схемы, графики и диаграммы вычерчиваются аккуратно, по линейке, в выбранном для каждой физической величины в соответствии сГОСТ масштабе. Допускается применение для этой цели компьютернойграфики.При оформлении работы приводятся все необходимые формулы, атакже расчеты с подстановкой данных.
При расчёте механических и рабочих характеристик электродвигателей полученные результаты могут бытьпредставлены в виде таблиц с подстановкой данных в формулы при вычислении только характерных режимов.Выполненная расчетно-графическая работа сдается в установленныйсрок преподавателю на проверку.
После проверки и получения подписипреподавателя о допуске к защите, студент защищает расчетнографическую работу. При защите расчетно-графической работы студентузадаются вопросы, требующие знания методики проводимых расчетов иумения проведения анализа полученных результатов.4Задание и данные для выполнения расчетно-графической работыРасчетно-графическая работа представляет собой расчёт естественной и искусственных механических характеристик и рабочих характеристик трёхфазного асинхронного двигателя серии 4А.
При выполнении егонеобходимо:1. Начертить Г-образную схему замещения асинхронного двигателя.2. Рассчитать и построить естественные механические характеристики асинхронного двигателя M = f (s) и n2 = f (M).3. Рассчитать и построить искусственные механические характеристики асинхронного двигателя n2 = f (M) при изменении:1) напряжения питания U1,2) активного сопротивления обмотки ротора R2¢,3) частоты f1 и напряжения питания U1 по закону U1 / f1 = const.4. Для естественного режима работы рассчитать и построить рабочиехарактеристики асинхронного двигателя M, n2, I1, cosj, P1, h = f (P2).5. Для заданного момента нагрузки Mс асинхронного двигателя определить его основные энергетические показатели I1, cosj, P1, h и потребляемый из сети ток I при номинальном и пониженном напряжении питания.
Рассчитать пусковые токи асинхронного двигателя при номинальноми пониженном напряжении питания. Сделать выводы о целесообразностирегулирования напряжения питания электродвигателя.Исходными данными для расчёта характеристик асинхронного двигателя являются приведённые в табл.1 – 4а) тип и паспортные данные электродвигателя:U1н — номинальное фазное напряжение, В;f1н — номинальная частота сети, Гц;P2н — номинальная мощность, кВт;n2н — номинальная частота вращения, мин-1;hн — коэффициент полезного действия электродвигателя в номинальном режиме, %;сosφн — коэффициент мощности электродвигателя в номинальномрежиме;б) параметры схемы замещения:Rх, Xх — активное и индуктивное сопротивления цепи намагничивания электродвигателя, Ом;R1, X1 — активное и индуктивное сопротивления фазной обмоткистатора, Ом;R2¢, X2¢ — приведённые к обмотке статора активное и индуктивноесопротивления фазной обмотки ротора, Ом;в) коэффициенты, задающие степень изменения параметров источника электропитания и электродвигателя (сообщаются преподавателем):5kU = U1 / U1н — коэффициент относительного изменения напряженияпитания электродвигателя;kR2 = R2и¢ / R2¢ — коэффициент относительного изменения приведённого активного сопротивления фазной обмотки ротора;kf = f1 / f1н- коэффициент относительного изменения частоты напряжения питания.Дополнительную информацию об электродвигателе можно получитьиз его условного обозначения, структура которого поясняется на примереасинхронного двигателя 4А160S4УЗ.4А 160 S 4 У Зусловное обозначение категории размещения электродвигателя (З — исполнение электродвигателя для эксплуатациив закрытых помещениях с естественной вентиляцией безискусственно регулируемых климатических условий);условное обозначение климатического исполнения электродвигателя (У — электродвигатели, предназначенные дляэксплуатации в районах с умеренным климатом);число полюсов 2р электродвигателя;условное обозначение установочного размера по длинестанины (S — меньший, М — средний, L — большой) и длинысердечника (А — меньшая, В — большая);высота оси вращения (вала) от основания станины, мм;название серии (четвёртая серия асинхронных двигателей).Основные теоретические положения и методические указанияк выполнению расчетно-графической работы1.
Устройство и схема замещения асинхронного двигателяТрехфазный асинхронный двигательсостоит из двух основных частей: неподвижного статора и вращающегося ротора.Статор (рис.1) представляет собойпомещенный внутри в стального или алюминиевого корпуса 1 полый цилиндр 2, собранный из кольцеобразных изолированных пластин электротехнической стали. Наего внутренней стороне имеются пазы, вкоторых размещаются симметрично трифазные обмотки 3, состоящие из однойили нескольких катушек медного изолированного провода. Фазные обмотки соеди-Рис.16няются звездой или треугольником и подключаются к трехфазной сети.Схема соединения фазных обмоток зависит от линейных напряженийтрехфазной сети, указанных на клеммной коробке электродвигателя, например, 220/380 В.
При меньшем напряжении 220 В фазные обмотки соединяются треугольником, а при большем напряжении 380 В звездой, чтообеспечивает при каждом способе соединения фазное напряжение обмоток220 В.Ротор асинхронного двигателя представляет собой закрепленный навалу цилиндр, собранный из изолированных пластин электротехническойстали, на внешней стороне которого имеются пазы. В пазах расположенаего обмотка, которая может быть короткозамкнутой и фазной.
Соответственно различают асинхронный двигатель с короткозамкнутым и фазнымротором.Обмотка короткозамкнутого ротора (рис.2) выполняется в виде круглой («беличьей») клетки, образованной расположенными в пазах роторамедными или алюминиевыми стержнями 1, замкнутыми накоротко с двухсторон кольцами 2 из того же материала.Фазная обмотка ротора (рис.3) выполняется так же, как и обмоткастатора, изолированным медным проводом. Ее катушки соединяются звездой, а их свободные концы присоединяются к трем контактным кольцам 1,находящимся на валу ротора. Кольца изолированы друг от друга и от вала.К контактным кольцам прижаты графитовые щетки 2, при помощи которых к обмотке ротора подключается трехфазный реостат 3.