Что такое якорный двигатель
Что такое якорный двигатель
Диаграмма, поясняющая принцип действия двигателя постоянного тока, имеет вид



Под воздействием приложенного напряжения по обмоткам якоря и возбуждения протекают токи. Ток возбуждения создает магнитный поток. На проводники якоря с током в магнитном поле действует сила, заставляющая якорь вращаться.
Классификация двигателей по способу подключения обмотки возбуждения:
– двигатели независимого возбуждения (ДНВ);
– двигатели с параллельным возбуждением, шунтовые (рис. 3.46, а);
– двигатели с последовательным возбуждением, сериесные (рис. 3.46, б);
– двигатели со смешанным возбуждением, компаундные (рис. 3.46, в).
На рис. 3.46 представлены схемы включения двигателей, где R о.в – сопротивления в цепи обмотки возбуждения; R д – добавочное сопротивление в цепи якоря; ОВ с и ОВ ш – сериесная и шунтовая обмотки возбуждения.
Рис. 3.46. Схемы включения шунтового ( а),
сериесного ( б) и компаундного ( в) двигателей
Противоэдс в двигателе. При направлении тока, указанном на рис. 3.47, якорь будет вращаться против часовой стрелки (правило левой руки).
Индуцируемая ЭДС будет направлена против тока (правило правой руки).
Рис. 3.47. Направление тока
и ЭДС в обмотке якоря
На основании второго закона Кирхгофа для якорной цепи имеем уравнение электрического равновесия для двигателя
 ,
,
из которого находим
 .
.
Зависимость магнитного потока и момента от тока якоря в двигателе. У шунтового двигателя машины Ф = const , так как i в не зависит от I я . У сериесного двигателя Ф создается током якоря.

Рис. 3.48. Зависимость магнитного потока ( а) и момента ( б) от тока якоря
( 1 – сериесный двигатель; 2 – компаундный; 3 – шунтовый)
У компаундного двигателя зависимость Ф = f ( I я ) занимает промежуточное положение между зависимостью для сериесного и шунтового двигателей. При  максимальный поток у сериесной машины.
максимальный поток у сериесной машины.
У шунтовой машины  , так как
, так как  . У сериесной машины
. У сериесной машины  . Учитывая, что
. Учитывая, что  (начальный участок зависимости), получаем
(начальный участок зависимости), получаем  . Зависимость M = f ( I я ) у компаундного двигателя занимает промежуточное положение между этой же зависимостью для сериесного и шунтового двигателей.
. Зависимость M = f ( I я ) у компаундного двигателя занимает промежуточное положение между этой же зависимостью для сериесного и шунтового двигателей.
При перегрузке  максимальный момент – у сериесного двигателя, поэтому он обладает большой перегрузочной способностью, так как при перегрузке развивает максимальный момент.
максимальный момент – у сериесного двигателя, поэтому он обладает большой перегрузочной способностью, так как при перегрузке развивает максимальный момент.
Механическая характеристика ДТП (рис. 3.49) .Используя соотношения


 – электромеханическая характеристика;
– электромеханическая характеристика;
 – механическая характеристика.
– механическая характеристика.
Ремонт электродвигателей переменного
и постоянного тока

Если сравнивать агрегаты на постоянном и переменном токе, то второй тип двигателей менее сложен, однако это не значит, что мероприятия с ним могут выполняться своими силами. Основная сложность чаще всего связана с последовательностью ремонта, который должен выглядеть следующим образом:
- Разборка электрического двигателя;
- Извлечение обгорелых фрагментов обмотки;
- Намотка новых секций;
- Укладка секций в статорные пазы (требует использования особых изоляционных материалов);
- Пропитка намотанного статора специальным составом;
- Сушка электродвигателя;
- Сборка агрегата (при необходимости включает замену подшипников).
Мы занимаемся ремонтом электродвигателей постоянного тока на профессиональном уровне.
Ремонт электродвигателей переменного тока
Основные работы, которые подразумевает ремонт электродвигателей переменного тока, следующие:
- Диагностика состояния электродвигателя;
- Восстановление фазных роторов с заменой обмотки;
- Ремонт статора с заменой обмотки;
- Восстановление или изготовление новой обмотки ротора и статора из нового провода;
- Вакуумная пропитка кремнеорганическим лаком КО – 916;
- Замена сваренных или паяных обмоток ротора;
- Ремонт подшипникового узла, восстановление посадочных мест;
- Испытание отремонтированного оборудования.
В нашей компании доступен также ремонт роторов с дефектами (забоины, риски, заусенцы, износ узловых деталей и др.)
Ремонт электродвигателей постоянного тока
Электрический двигатель постоянного тока – это сложный прибор, который преобразует энергию постоянного электрического тока в механическую энергию (при этом дополнительно происходит выделение тепла). Современные электродвигатели считаются очень надёжными и долговечными, однако даже в этом случае никто не застрахован от поломок и неисправностей, возникающих в процессе их эксплуатации.
Наша компания занимается ремонтом электродвигателей постоянного тока на профессиональном уровне. Специалисты выполняют различные виды ремонтов, включающих в себя:
- Демонтаж основных или добавочных полюсов магнитной системы;
- Замену подшипников скольжения и качения;
- Демонтаж якорной обмотки;
- Удаление изоляции корпуса магнитной системы;
- Изолирование корпусной и витковой изоляции;
- Высоковольтные испытания секций;
- Пайку обмотки якоря, (возможна пайки аргоном);
- Шлифовку и проточку коллектора;
- Испытание двигателя повышенным напряжением;
- Ремонт корпуса и др.
В 2010 году введено в эксплуатацию современное технологичное оборудование: ЭЛСИТ-60П3 ООО “ЭЛСИТ” г. Томск, высокочастотная установка для соединения петушков коллектора с выводами якорных катушек способом индукционного нагрева.
Исполнительные двигатели постоянного тока
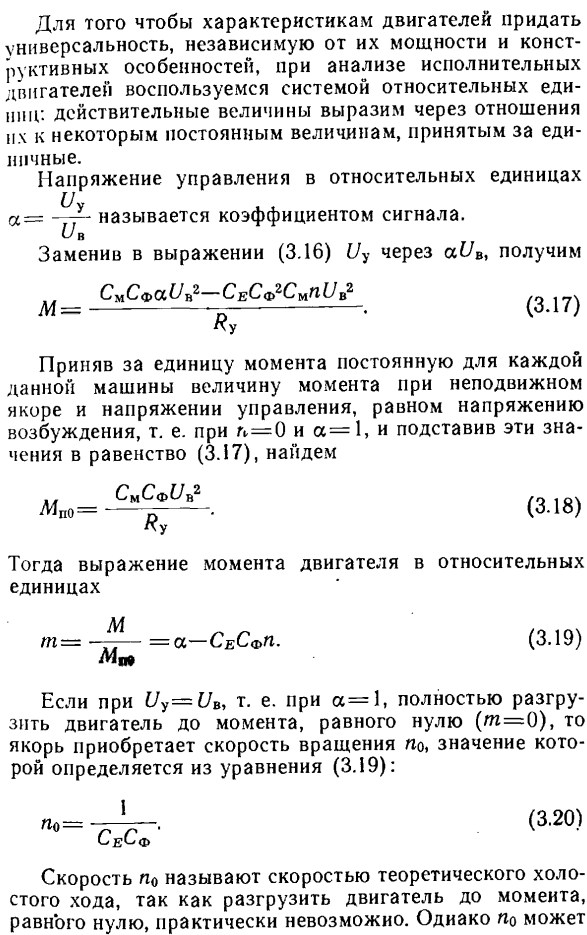
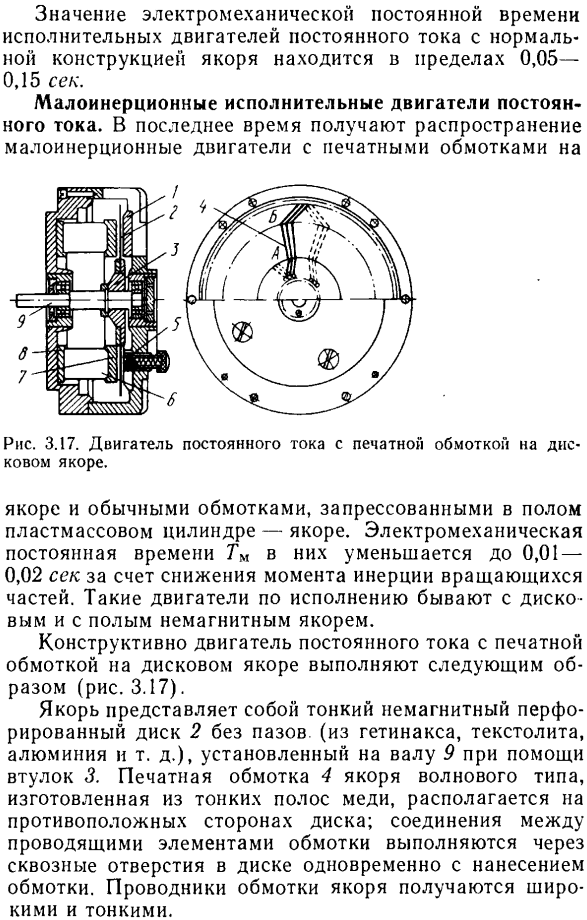
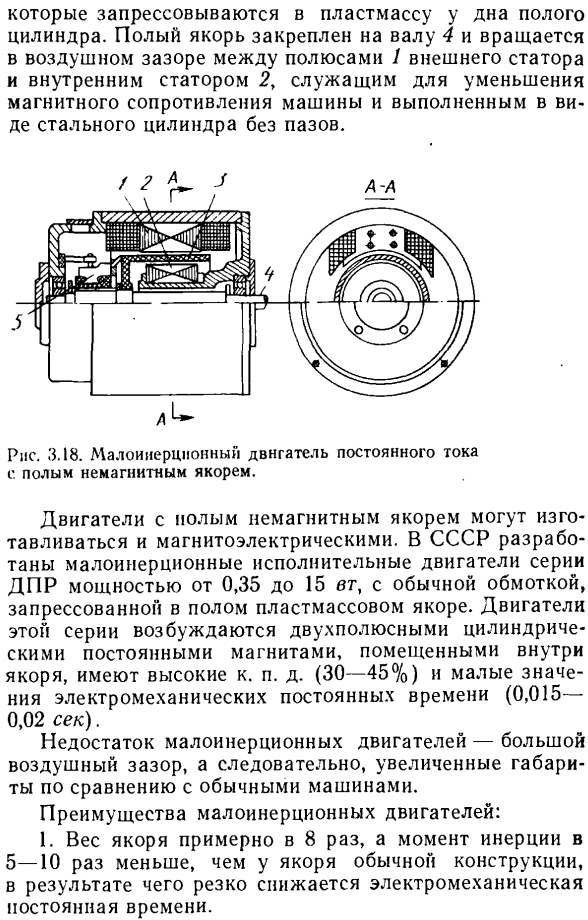


Исполнительные двигатели постоянного тока
Исполнительные двигатели постоянного тока. Цель и требования исполнительного органа motor. In новейшие системы автоматики и телемеханики, маломощный исполнительный двигатель от 1 ваттминут до нескольких киловатт переменного тока широко используются в качестве преобразователя для механического вращения электрических сигналов в некоторых автоматизированных устройствах. Наиболее распространенным является двигатель с максимальной мощностью 100 Вт. Маловероятно, что исполнительный двигатель будет работать в номинальном режиме. Для них характерны частые старты, остановки, инверсии. Исполнение автоматической схемы детали работы электродвигателя определяют следующие основные требования к исполнению электродвигателя: Отсутствие самоходно-автоматического торможения двигателя при снятии сигнала (управляющего напряжения).
Несмотря на некоторые существенные недостатки, связанные с наличием скользящих контактов между щеткой и коллектором, в качестве привода широко используется специально разработанный двигатель постоянного тока с независимым возбуждением (часто возбуждение постоянным магнитом). Людмила Фирмаль
- Стабильная работа двигателя в широком диапазоне регулирования скорости. Линейность механических и регулировочных характеристик; Высокий пусковой момент. Управление низкой мощности с механической силой большой достаточно для вала. Высокоскоростной; Надежность работы, небольшие габариты и вес. В СССР, постоянного тока, постоянного тока электродвигатели типа СЛ, Ми, DPM и другие были изготовлены, и конструктивно они изготавливаются таким же образом, как и другие микромашин постоянного тока (см. рис. 1.1).Их магнитная система полностью пополняется из изолированных листов электротехнической стали.
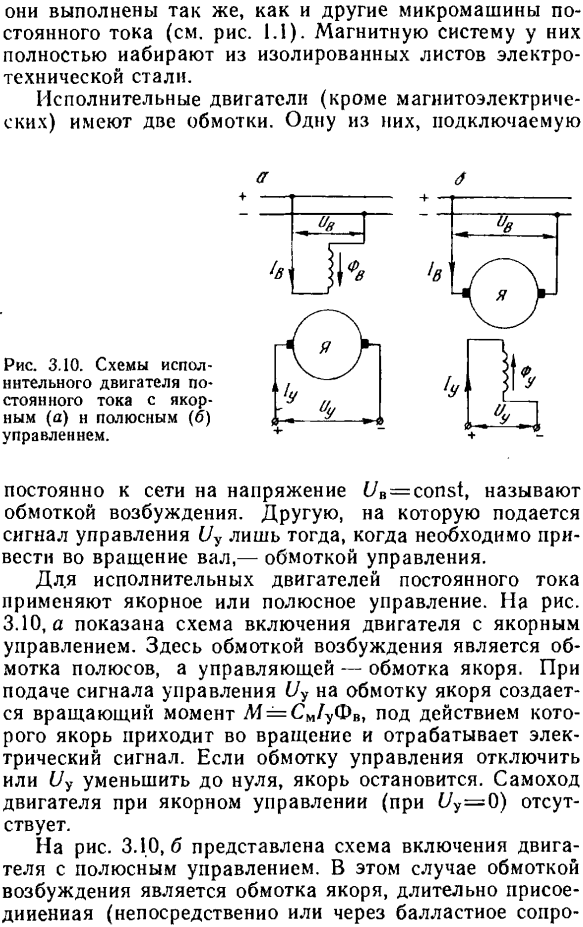
- Если вы перережете обмотку управления или уменьшите ее до нуля, якорь остановится. Отсутствует самоходный двигатель с якорным управлением (6Uy = 0). На рисунке 3.10.6 показана схема, включающая двигатель с полюсом control. In в этом случае обмотка возбуждения представляет собой обмотку якоря с длинным соединением (непосредственно или через балласт Сопротивление)■ток якоря до напряжения 1 / V, здесь ток возбуждения/ V. управляющее напряжение 11y во время испытания подается на полюс winding. In Привод постоянного магнита позволяет только управление анкера. Рассмотрим характеристики исполнительного двигателя с различными методами управления. Двигатель с якорным управлением.
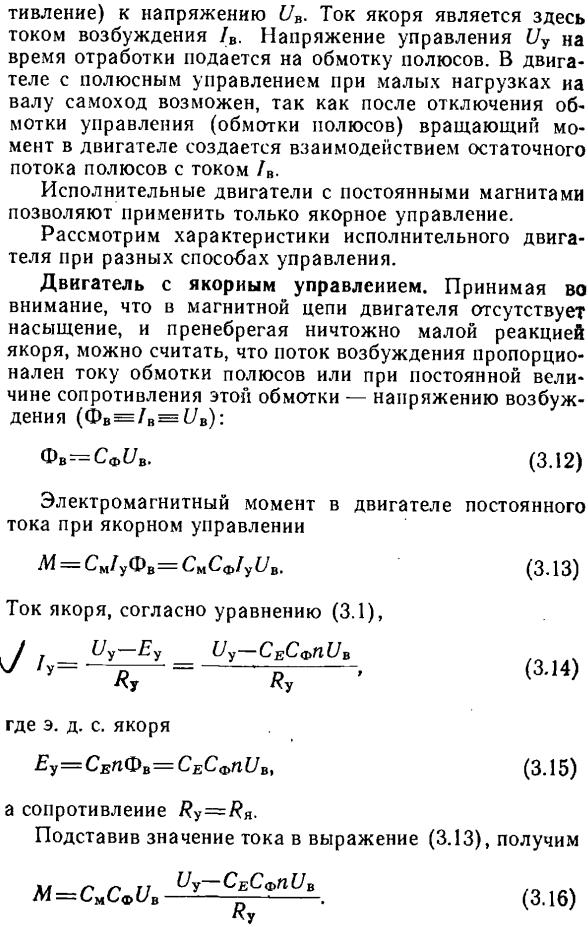
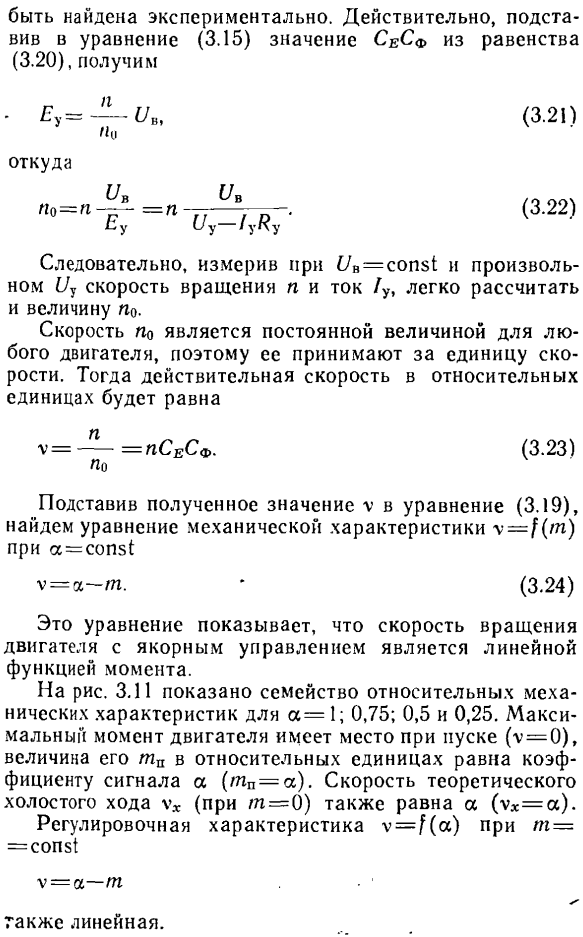
Если учесть отсутствие насыщения в магнитопроводе двигателя и пренебречь пренебрежимо малой реакцией якоря, то можно предположить, что магнитный поток пропорционален току в полярной обмотке или, если сопротивление этой обмотки постоянно, пропорционально напряжению возбуждения.) : Фвг=Сф[/в. (3.12) Электромагнитный момент двигателя постоянного тока c якорным управлением (3.13) M =С» / UVB =С » СФ / У * / В. Ток якоря согласно уравнению (3.1)、 /, Щиу-СЕСФпив/ои Y / y = ^ = dG ’ (3-14) е. д. якорь с Eu = SBnPf = CESfn1> c, (3.15) и сопротивление/?Y =#i. M = SmSFU1 У-СЕСПП I) И (3.16) Путем присвоения текущего значения выражению (3.13): Для придания характеристикам двигателя универсальности независимо от мощности и конструктивных особенностей при анализе исполнительного двигателя используется система относительных единиц.
Управляемый двигатель полюса, после того, как обмотка управления (обмотка полюса) выключена, крутящий момент двигателя генерируется остаточным потоком полюса и взаимодействием тока/вольта, поэтому можно самостоятельно продвигаться при низкой нагрузке вала. Людмила Фирмаль
Что такое якорный двигатель

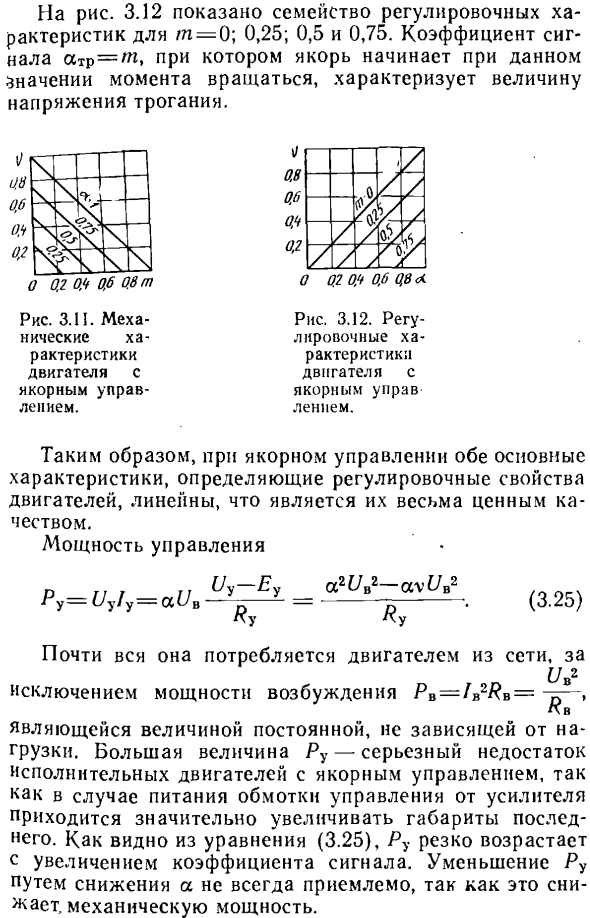
Несмотря на ряд существенных недостатков, связанных с наличием скользящего контакта между щеткой и коллектором, исполнительные двигатели постоянного тока широко используются в системах автоматического управления, регулирования и контроля, поскольку обладают и рядом положительных качеств, в частности такими как: плавное, широкое и экономичное регулирование частоты вращения; практическое отсутствие ограничений на максимальную и минимальную частоту вращения; большие пусковые моменты; хорошая линейность механических а при якорном управлении и регулировочных характеристик.
Как и любые исполнительные двигатели, эти имеют две обмотки: обмотку возбуждения и обмотку управления. При этом напряжение управления может подаваться либо на обмотку якоря, либо на обмотку возбуждения. Поэтому различают якорное и полюсное управление.
§ 2.1 Якорное управление исполнительным двигателем

Рис. 2.1. Схема включения исполнительного двигателя при якорном управлении
Схема включения двигателя с якорным управлением показана на рис. 2.1. Напряжение возбуждения подается на обмотку полюсов, напряжение управления — на обмотку якоря. Коэффициент сигнала a здесь равен a = Uу/Uв. Для двигателей с постоянными магнитами a = Uу/Uу.ном. Регулирование частоты вращения осуществляется изменением напряжения управления.
При отсутствии насыщения Фв= kфUв, а поскольку Uв = const, магнитный поток возбуждения также остается постоянным, т.е. Фв = const.

Вращающий момент двигателя

Выразим момент в относительных единицах, приняв за базовый момент пусковой момент, развиваемый двигателем при n = 0 и a = 1

Тогда относительное значение момента m = M/Mб
 (2.1)
(2.1)
Частота вращения при холостом ходе (m = 0 и a = 1)
 (2.2)
(2.2)
Откуда находим cеkф= 1/nо. Подставляя это значение в (2.1), получим
 | (2.3) |
где n = n/nо— относительная частота вращения двигателя.
 (2.4)
(2.4)
Уравнение (2.3) есть уравнение механической характеристики исполнительного двигателя при якорном управлении. Решив его относительно n, получим уравнение регулировочной характеристики
Механическая мощность в относительных единицах рмх = mn = n(a — n). Угловую скорость, при которой наступает максимум мощности, найдем известным приемом (dpмх/dn = 0), откуда nм= a/2, а максимальное значение механической мощности будет

 Мощность управления
Мощность управления
Приняв за базовую единицу мощность управления при коротком замыкании Ру.к (n = О, a = 1)

 получим мощность управления в относительных единицах
получим мощность управления в относительных единицах

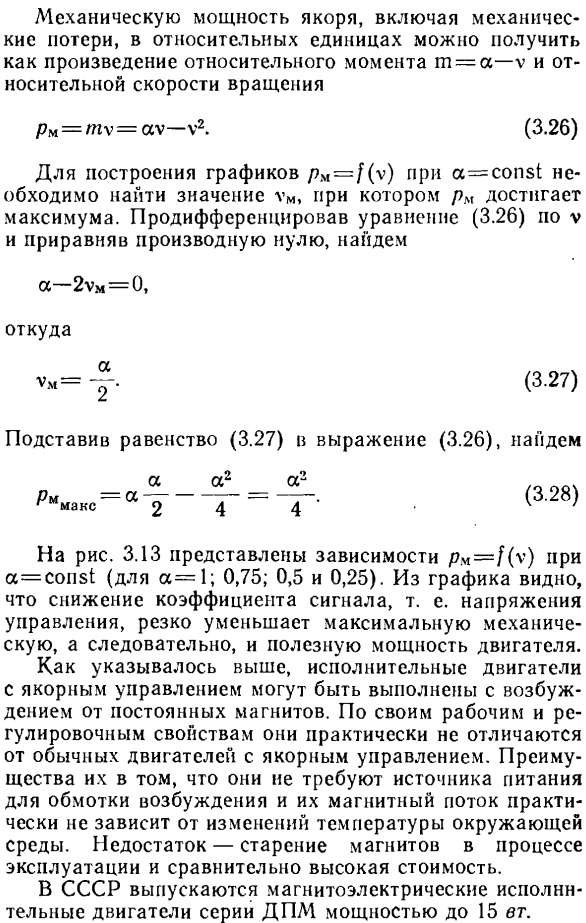
На рис. 2.2,а представлены механические, на рис. 2.2,б — регулировочные характеристики, а на рис. 2.3 показана зависимость рмх = f(n) исполнительного двигателя. Проанализируем свойства двигателя при якорном способе управления.
Механические характеристикилинейные и параллельные, что означает независимость быстродействия от коэффициента сигнала. Пусковой момент и угловая скорость холостого хода пропорциональны коэффициенту сигнала.

Рис.2.2. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при якорном управлении

Рис. 2.3. Зависимость механической мощности от скорости вращения при якорном управлении
Регулировочные характеристикилинейные. Напряжение трогания пропорционально моменту нагрузки. Линейность механических и регулировочных характеристик является важным достоинством якорного управления.
Мощность управления резко возрастает с увеличением коэффициента сигнала. Кроме того, она доходит до 95 % полной потребляемой мощности двигателя, поскольку является мощностью якорной цепи, что характерно для двигателей постоянного тока.
В данном случае это является существенным недостатком якорного управления, ибо предполагает наличие мощных и дорогих усилителей.
Мощность возбуждения остается величиной постоянной, независящей ни от коэффициента сигнала, ни от частоты вращения. К тому же — она небольшая по величине, что также характерно для машин постоянного тока.
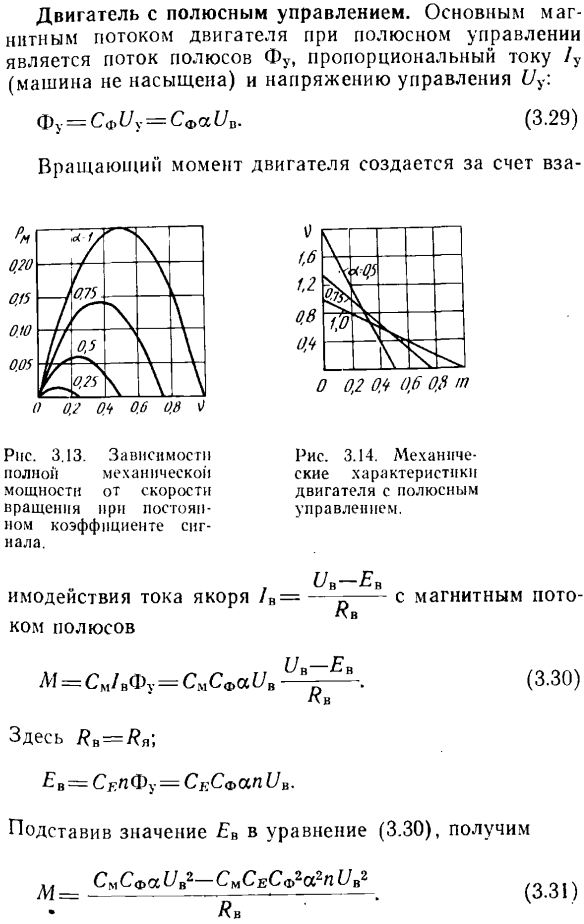
Максимум механической мощности в сильной степени зависит от коэффициента сигнала и даже при a = 1 не превышает 1/4 базовой мощности.
§ 2.3. Полюсное управление исполнительным двигателем

Рис. 2.4. Схема включения исполнительного двигателя при полюсном управлении
Схема управления приведена на рис.2.4 Напряжение управления подается на обмотку главных полюсов, напряжение возбуждения — на обмотку якоря, по которой в течение всего времени работы двигателя протекает ток возбуждения. В двигателях, мощностью более 10 Вт, для его ограничения включают дополнительное сопротивление Rд.
Если пренебречь насыщением магнитной цепь, можно считать Ф = kфUу = kфaUв. Тогда ток якоря


Принимая за базовый момент пусковой (n = 0, a =1))

получим относительное значение момента

 С учетом (2.2) уравнение механической характеристики примет вид
С учетом (2.2) уравнение механической характеристики примет вид
Решив его относительно n, получим уравнение регулировочной характеристики

Механическая мощность в относительных единицах рмх= mn = an — a 2 n 2 . Скорость, при которой наступает максимум мощности nм = 0,5/a. Тогда максимальная механическая мощность будет


 Мощность возбуждения рв = UвIв. Подставляя значение тока, получим
Мощность возбуждения рв = UвIв. Подставляя значение тока, получим

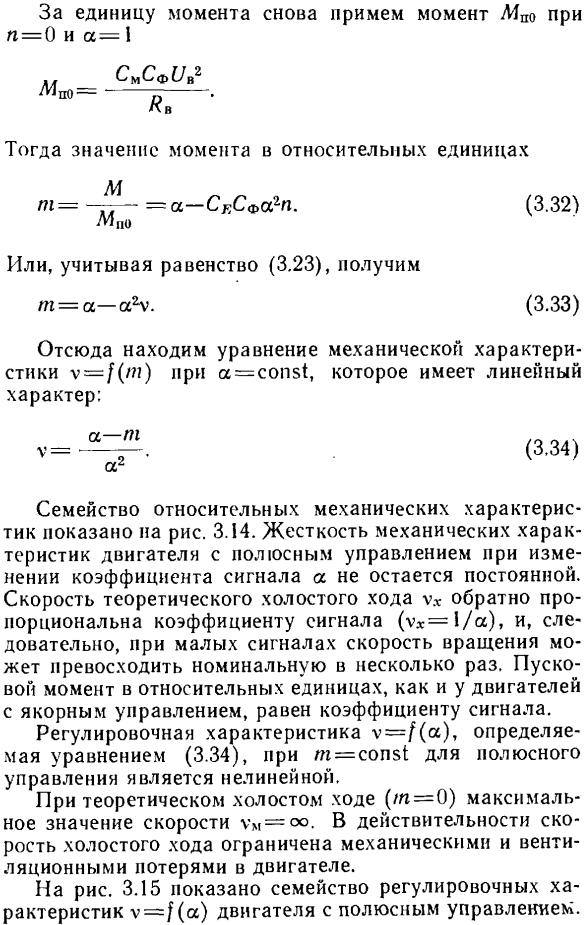
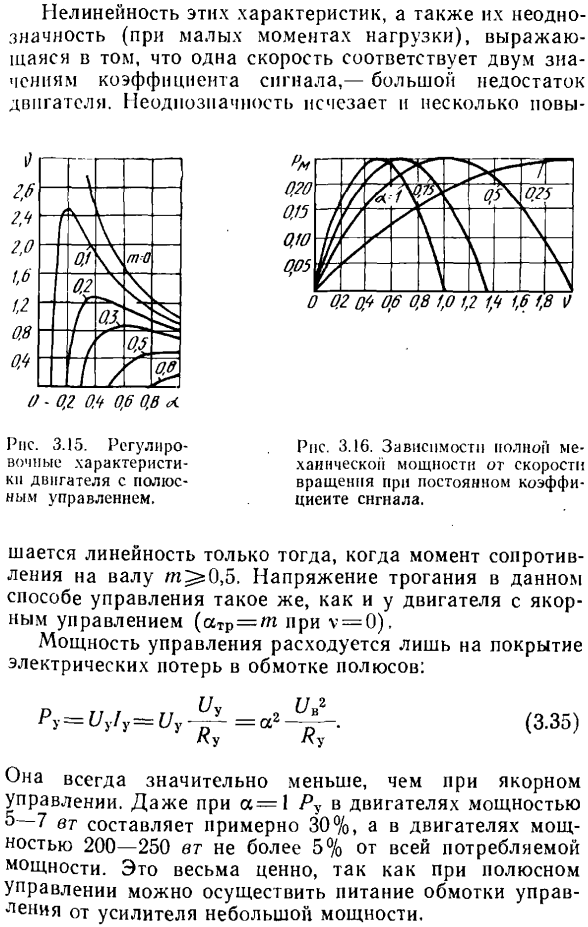
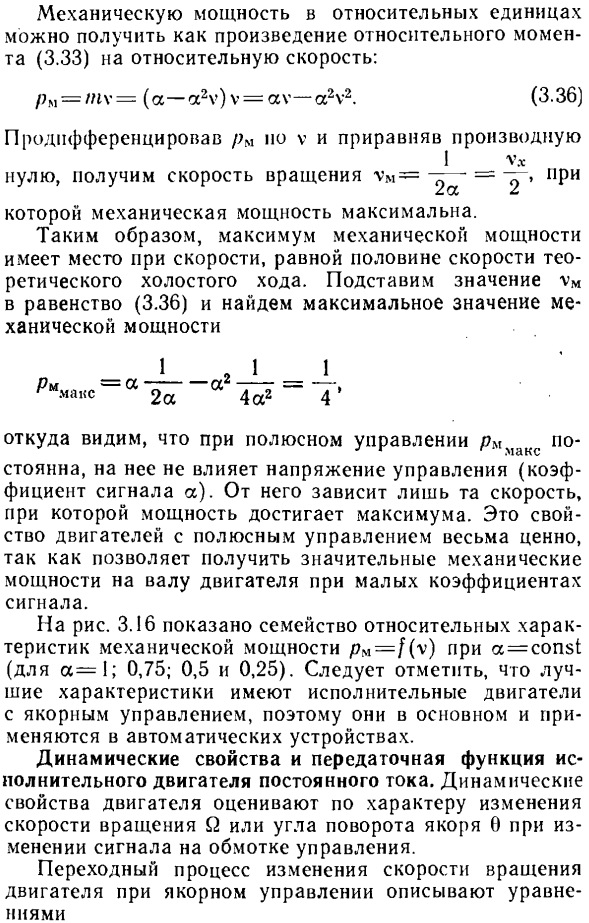
На рис. 2.5,а представлены механические, на рис. 2.5,б — регулировочные характеристики, а на рис. 2.6 показана зависимость рмх = f(n) исполнительного двигателя при полюсном управлении.

Рис.2.5. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при полюсном управлении
Проанализируем эти графики.
Механические характеристики линейные, но непараллельные, к тому же и неоднозначные (одну и ту же частоту вращения можно получить при разных значениях a). Пусковой момент прямо-, а частота вращения холостого хода обратно пропорциональны коэффициенту сигнала и при малых a может существенно превышать номинальную, что безусловно опасно для двигателя.
Регулировочные характеристикинелинейные, а при m 0,5.
Мощность управления пропорциональна квадрату коэффициента сигнала и не зависит от частоты вращения. Она значительно меньше, чем при якорном управлении, что является достоинством данного способа.
Мощность возбужденияс увеличением частоты вращения уменьшается и тем быстрее, чем больше a.
Максимум механической мощности не зависит от коэффициента сигнала, что также можно отнести к достоинствам полюсного управления.
Несмотря на отмеченные достоинства полюсного управления, предпочтение все-таки следует отдать якорному потому, что оно обеспечивает линейные и однозначные характеристики, в принципе исключает самоход (при полюсном он возможен из-за взаимодействия тока якоря с потоком остаточной намагниченности полюсов), обладает более высоким быстродействием, поскольку индуктивность якоря меньше индуктивности обмотки возбуждения.