Сайт о внедорожниках УАЗ, ГАЗ, SUV, CUV, кроссоверах, вездеходах
Сайт о внедорожниках УАЗ, ГАЗ, SUV, CUV, кроссоверах, вездеходах
Главная функция комплексной микропроцессорной системы управления двигателем УМЗ-А274 EvoTech 2.7 на автомобиле Газель и Соболь, это оптимизация работы двигателя с точки зрения обеспечения соответствия транспортного средства экологическим нормам Евро-4 в отношении выбросов вредных веществ.
Датчики комплексной микропроцессорной системы управления двигателем УМЗ-А274 EvoTech 2.7 на автомобиле Газель и Соболь, назначение, принцип действия, расположение.
Составляющим элементами комплексной микропроцессорной системы управления двигателем УМЗ-А274 EvoTech 2.7 на автомобиле Газель и Соболь являются:
— Контроллер (или электронный блок управления).
— Датчики.
— Исполнительные механизмы и узлы системы питания.
— Исполнительные устройства системы зажигания.
— Исполнительный механизм системы охлаждения.
— Устройства антитоксичной системы.
Контроллер, датчики, исполнительные механизмы, узлы и устройства систем соединены между собой посредством жгута низковольтных проводов, шлангов и трубок. Датчики комплексной микропроцессорной системы управления двигателем (КМПСУД) в процессе работы передают информацию о текущем состоянии двигателя и о воздействии водителя на органы управления автомобилем в контроллер, который, обработав полученные сведения, посредством исполнительных механизмов и реле, управляет работой двигателя. Изменяя длительность впрыска топлива и угол опережения зажигания.
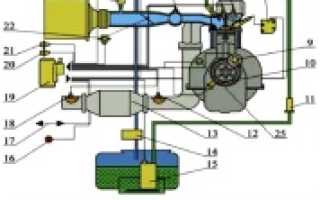
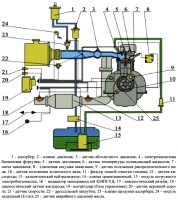
Принципиальная схема комплексной микропроцессорной системы управления двигателем УМЗ-А274 EvoTech 2.7 на автомобиле Газель и Соболь.
Датчики КМПСУД входящие в комплектацию двигателя УМЗ-А274 EvoTech 2.7 на автомобиле Газель и Соболь.
Датчик положения коленчатого вала — датчик синхронизации DG-6P-K, BOSCH 0 261 210 331.
Индуктивного типа. Датчик работает в паре с диском синхронизации, имеющим 60 зубьев, два из которых удалены. Просечка зубьев является фазовой отметкой положения коленчатого вала двигателя. Совмещение начала 20-го зуба диска с датчиком положения коленчатого вала соответствует положению поршней первого и четвертого цилиндров двигателя в верхней мертвой точке. Отсчет зубьев начинается после просечки по ходу вращения коленчатого вала.
Датчик служит КМПСУД для синхронизации управления исполнительными механизмами с работой механизма газораспределения двигателя. Датчик установлен в передней части двигателя на специальном кронштейне фланца крышки шестерен распределительного вала. Зазор между торцом датчика и зубом диска синхронизации должен быть в пределах 0,3-1,8 мм.
Датчик положения распределительного вала — датчик фазы PG3.8, BOSCH 0 232 103 097.
Интегральный датчик на основе эффекта Холла со встроенным усилителем и формирователем сигнала. Датчик работает в паре со штифтом-отметчиком, установленным на ступице шестерни распределительного вала. Момент совмещения середины штифта-отметчика с датчиком положения распределительного вала соответствует совпадению середины первого зуба диска синхронизации с датчиком положения коленчатого вала.
Датчик служит для определения начала рабочего хода в первом цилиндре и установлен в передней части двигателя в отверстии крышки шестерен распределительного вала. Зазор между торцом датчика и штифтом- отметчиком должен быть в пределах 0,2-1,8 мм.
Датчик температуры охлаждающей жидкости – датчик температуры TF-W, BOSCH 0 280 130 093.
Резистивного типа. Служит для контроля за тепловым состоянием двигателя. Датчик установлен в корпусе насоса охлаждающей жидкости двигателя. По информации получаемой от датчика, контроллер корректирует топливоподачу и угол опережения зажигания, а также подает сигнал на реле, которое включает и выключает электромагнитную муфту привода вентилятора системы охлаждения.
Датчик абсолютного давления 110308-0239010.
Конструктивно совмещен с датчиком температуры воздуха. Установлен в ресивере и предназначен для измерения давления в ресивере, которое меняется в зависимости от нагрузки, и одновременного определения температуры входящего в двигатель воздуха. Датчик установлен на ресивере, с верхней стороны.
Датчик детонации — KS-4-S, BOSCH 0 261 231 176.
Пьезоэлектрического типа. Служит для определения наличия детонации в цилиндрах двигателя и позволяет контроллеру корректировать угол опережения зажигания. Датчик установлен на специальной гайке, крепящей головку блока, слева, между вторым и третьим цилиндрами.
Датчик аварийного давления масла 6022.3829-03.
Контактного типа. Установлен в масляной магистрали двигателя. Сигнал датчика используется контроллером для управления сигнализатором красного цвета аварийного давления масла и «STOP», а также желтого цвета неисправностей системы управления (КМПСУД). Замыкание контактов происходит при давлении 0,4–0,8 кгс/см2 (0,04–0,08 МПа).
Датчик детонации двигателя 405, 406, 409, 4213, 4216
Здесь приведена исчерпывающая информация про датчик детонации двигателя 405, 406, 409, 4213, 4216. Описаны технические характеристики и способы определения неисправности. Указано место, где находится датчик детонации. Подробно расписана замена датчика детонации на данных движках. С данным материалом эксплуатировать датчик детонации двигателя будет очень просто.
- Назначение и принцип работы;
- Устройство датчика детонации;
- Принципиальная электрическая схема подключения ДД;
- Технические характеристики;
- Каталожный номер;
- Аналоги датчика детонации GT-305.
- Взаимозаменяемость;
- Неисправности датчика детонации
- Ошибки прибора;
- Место установки датчика
- Место установки вибродатчика на моторе УМЗ 4213, 4216;
- Как проверить датчик детонации двигателя ?
- Замена датчика детонации мотора 405, 406, 409.
Назначение и принцип работы
Его назначение определять повышенную детонацию бензодвигателя. Данное устройство является сенсором компьютера движителем. Он преобразует детонационные явления в электрические импульсы и отправляет их в ЭБУ. Который, используя эти сведения, уменьшает угол опережения зажигания во всех цилиндрах для поддержания нормальной работы мотора.
Принцип его работы основан на пьезоэлектрическим акселерометре, который под действием механических вибраций вырабатывает ЭДС переменного тока. Размер выходящего импульса прибора самая большая на частоте детонационных явлений в движке на отрезке 5-6 кГц.
Подключение измерителя к жгуту проводов осуществляется с помощью двух контактной колодки с защелкой.
Обзор датчика детонации:
Устройство датчика детонации
Устройство представляет собой шайбу, внутри которой расположен чувствительный элемент, преобразующий механические импульсы в электрический сигнал.
Принципиальная электрическая схема подключения ДД
Технические характеристики
- Электрическая емкость: 900-1300 пФ
- Осевая чувствительность: 28±мB/g
- Неравномерность амплитудно-частотной характеристики в диапазоне 5-10 кГц: ±1дБ
- Электрическое сопротивление изоляции: не менее 50 МОм
Каталожный номер
- 406.3855000 — измеритель сотрясения GT305
- 40904.3855000 — датчик вибрации BOSCH 0 261 231 176 для мотора 40904 УАЗ, 40524,40525, А274 ГАЗ ЕВРО-3
- 40904-3855000 — прибор дрожания для автомотора 40904 УАЗ, 40524, 40525, А274 ГАЗ ЕВРО-3 производства Пекар
- 18.3855000 — электро датчик вибрации 18.3855 для движков 4213, 409 УАЗ, 406 ГАЗ, ВАЗ-2112 производство Автоприбор, г.Калуга
Аналоги датчика детонации GT-305 (РФ)
- Прибор вибрации дв.4213,409 УАЗ, 406 ГАЗ, ВАЗ-2112 (Автоприбор, г.Калуга) / 18.3855
- Измеритель дрожания дв.4213,409 УАЗ, 406 ГАЗ, ВАЗ-2112 (BOSCH) / 0 261 231 046
Взаимозаменяемость
- Измеритель вибрации дв.40904 УАЗ, 40524,40525, А274 ГАЗ ЕВРО-3 (BOSCH 0 261 231 176) / # 40904.3855000 взаимозаменяем с:
- Преобразователь вибрации дв.40904 УАЗ, 40524,40525, А274 ГАЗ ЕВРО-3 (ПЕКАР) / 40904-3855000
Неисправности датчика детонации
- Повышенная вибрация движителя на частоте вращения коленвала выше 3500 об/мин. Лампа неисправности горит при работающем движке. Самодиагности ЭБУ фиксирует код неисправности 41 (42).
- Проверьте исправность цепей 11 и 30а
- Повышенное сотрясение мотора на частоте вращения кардана выше 3500 об/мин. Лампа неисправности не горит при работающем сердце машины (нет неисправностей в системе). Выходное напряжение при простукивании прибора твердым не металлическим предметом менее 0,1 В
- Замените прибор
Ошибки прибора
| Код ошибки датчика детонации двигателя 409 | Наименование неисправности | Условия определения |
|---|---|---|
| 041 | Неисправность цепи прибора вибрации | При частоте вращения кардана более 3000 мин -1 |
| 081 | Максимальное смещение УОЗ по вибрации в одном из горшков движка | При работе ДВС |
Место установки датчика
На 405, 406, 409 двигателе он установлен на блоке цилиндров справа, между третьим и четвертым горшками.
Место установки вибродатчика на моторе УМЗ 4213, 4216
Как проверить датчик детонации двигателя ?
Проверка осуществляется несколькими способами:
- Проверка прибора вибрации мультиметром (Электрическим тестером). Измерять можно как на моторе, так и на снятом приборе:
- Включите тестер в режим измерения постоянного напряжения DC в диапазоне 200 мВ или меньше. После этого подсоедините щупы к выводам прибора. Просуньте металлический стержень в отверстие измерителя и выполните этим стержнем усилие на излом (но без фанатизма, чтобы не сломать корпус прибора), или положите датчик на металлическую пластину и постучите по ней металлическим предметом. Без воздействия на измеритель напряжение будет равно 0, а при воздействии оно начнет расти. При прекращении воздействия напряжение должно вернуться назад к нулю. Если напряжение не возвращается назад к нулю то преобразователь не исправен.
Если преобразователь установлен на машине то тогда снимите клеммную колодку и подсоедините щупы электрического тестера к его выводам. Осторожно, без фанатизма постучите по корпусу цилиндров металлическим предметом, изображая тем самым детонацию движка. При этом напряжение преобразователя вибрации должно меняться с нуля и до примерно 20 мВ. После прекращения стуков по мотору напряжение преобразователя вибрации должно возвращаться к нулю.
- Включите тестер в режим измерения постоянного напряжения DC в диапазоне 200 мВ или меньше. После этого подсоедините щупы к выводам прибора. Просуньте металлический стержень в отверстие измерителя и выполните этим стержнем усилие на излом (но без фанатизма, чтобы не сломать корпус прибора), или положите датчик на металлическую пластину и постучите по ней металлическим предметом. Без воздействия на измеритель напряжение будет равно 0, а при воздействии оно начнет расти. При прекращении воздействия напряжение должно вернуться назад к нулю. Если напряжение не возвращается назад к нулю то преобразователь не исправен.
- Измерение электрическим тестером (Мультиметром) сопротивления прибора:
- Измерение аналогично описанному выше (измерение напряжения датчика детонации). Измерение можно проводить на установленным измерителе детонации на движке и на снятом с него. Установите тестер в режим измерения сопротивления в диапазон до 1000 Ом (1 кОм). При воздействии на прибор вибрации сопротивление должно расти. При прекращении воздействия должно возвращаться к начальному сопротивлению, приблизительно 400-500ом. Если сопротивление не возвращается то прибор неисправен. Если сопротивление не растет то измеритель вибрации так же не исправен.
Проверка преобразователя сотрясения на осциллографе. Можно проводить на приборе, установленном на моторе и на снятом. Как удобней в практике.
- Подключите щупы осциллографа к выводам измерителя вибрации. Воздействуйте на него с разными усилиями, но без фанатизма. В спокойном состоянии диаграмма осциллографа будет представлять прямую линию
Датчик схема принципиальная двигатель
где k — коэффициент, зависящий от характеристик магнитной цепи; w — число витков обмотки; n — частота вращения распределителя потока; dф/d α — изменение потока Ф в зависимости от угла поворота.
Когда один из зубцов ротора 4 приближается к полюсу статора 1, в обмотке 3 нарастает напряжение. При совпадении фронта зубца ротора с полюсом статора (со средней линией обмотки) напряжение на обмотке достигает максимума, затем быстро меняет знак и увеличивается в противоположном направлении до максимума (рис. 5) при удалении зубца. Из формулы (4) видно, что пиковое значение U вых линейно изменяется с частотой вращения распределителя потока. На рис. 6 показан характер изменения сигнала U вых по углу поворота коленчатого вала при разной частоте вращения n распределителя потока.
Нетрудно видеть, что напряжение очень быстро изменяется от положительного максимума до отрицательного, поэтому нулевой переход (точка 0) между двумя максимумами может быть использован для управления системой зажигания при получении точного момента искрообразования. Однако точку перехода через ноль сложно детектировать с помощью электроники, так как схема будет чувствительна к сигналам помехи, т. е. не будет удовлетворять требованиям помехозащищенности. Поэтому для получения момента искрообразования используют точки а и Ь, которые выбираются на допустимых низких уровнях. При этом обеспечивается нечувствительность схемы детектирования к помехам и надежное срабатывание схемы в период пуска двигателя.
Распределитель потока, или зубчатый ротор, устанавливается на распределительный валик распределителя зажигания и изготавливается из мягкой стали. Число зубцов зависит от числа цилиндров двигателя. Необходимое поле создает постоянный магнит.
Рассмотренная магнитная система генераторного датчика чувствительна к влиянию изменений зазора, происходящих из-за конструктивных допусков, вибраций, передаваемых от двигателя деталям, входящим в состав магнитной цепи, что приводит к недопустимому асинхронизму момента искрообразования по цилиндрам двигателя. Поэтому на практике применяется симметричная магнитная система, которая обеспечивает для каждого положения распределителя потока средний зазор, являющийся суммой элементарных зазоров.
Принципиальная схема генераторного датчика коммутаторного типа с симметричной магнитной системой для четырехцилиндрового двигателя представлена на рис. 6.
Разработка постоянных магнитов, выполненных на основе новых магнитных материалов, таких как магнитоэласты, магниторезина, позволила резко снизить стоимость и массу датчика, увеличить его надежность.
Другим типом магнитоэлектрических датчиков, нашедших применение в автомобильных системах зажигания, является датчик с переменным потоком. Он состоит из неподвижной катушки и постоянного магнита, жестко связанного с валиком распределителя зажигания, причем число пар полюсов в магните равно числу цилиндров двигателя. Такие магнитные системы называются датчиками с вращающимися магнитами (рис. 7). Работа датчика характеризуется знакопеременным магнитным потоком и симметричной формой выходного напряжения (рис. 8).
Сигнал датчика с вращающимся магнитом требует более тщательной обработки в цепи детектирования с целью компенсации электрического смещения момента искрообразования в зоне низких частот вращения распределительного валика.
Датчик схема принципиальная двигатель
Автор: к.т.н. Вильфрид Криммель. Перевод: АЛЬФА-СЕНСОР © 2010.
Вильфрид Криммель работает в области измерительной техники крутящего момента более 20 лет. На фирме Lorenz Messtechnik GmbH он руководит калибровочной лабораторией.
1. Тензометрическая технология измерений
Историческое развитие технологии измерения крутящего момента начинается в 1678 году. В этом году английский учёный Роберт Гук описал пропорциональную зависимость между деформацией материала и напряжением материала в известном законе Гука.

Дальнейшим витком развития послужил 1833 год. Тогда английский учёный Хантер Кристи описал мостовую схему, при помощи которой можно измерять малейшие изменения напряжения. Не смотря на то, что схема в последующем получила название в честь второго изобретателя, Чарльза Витстоуна, настоящая слава принадлежит все же Хантеру Кристи.


Мостовая схема Wheatstone
Уильям Томсон, который позже стал лордом Кельвином (его именем названа температурная шкала), открыл в 1856 году зависимость между растяжением проводника и его электрическим сопротивлением.

 После этого не раз проводились эксперименты с проводниками. Например, в 1937 году с ними экспериментировал Нернст, чтобы измерить давление в двигателе внутреннего сгорания. Однако, первой модели свободно наклеиваемого тензорезистора пришлось ждать до 1938 года. Тогда профессором Руге был разработан первый тензорезистор. Уже три года позже появились первые индустриально изготовленные проволочные тензорезисторы, которые очень быстро нашли практическое применение. Настоящим прорывом для промышленно производимых тензодатчиков стали появившиеся в 1952 году на рынке плёночные тензорезисторы. Они вытравливались на покрытой проводящим материалом плёнке. Таким способом тензорезисторы изготавливаются и сегодня. Ещё в том же году, плёночные тензорезисторы были предложены для измерений крутящего момента. Таким образом были изготовлены первые невращающиеся тензодатчики крутящего момента. Эти датчики помогли решить многие задачи в разработках и испытаниях посредством измерения крутящего момента реакции. Но более важным и частым применением датчиков крутящего момента являются измерения на вращающемся валу. Здесь разработки длились ещё несколько лет, чтобы предложить на рынке готовые к применению тензометрические датчики крутящего момента.
После этого не раз проводились эксперименты с проводниками. Например, в 1937 году с ними экспериментировал Нернст, чтобы измерить давление в двигателе внутреннего сгорания. Однако, первой модели свободно наклеиваемого тензорезистора пришлось ждать до 1938 года. Тогда профессором Руге был разработан первый тензорезистор. Уже три года позже появились первые индустриально изготовленные проволочные тензорезисторы, которые очень быстро нашли практическое применение. Настоящим прорывом для промышленно производимых тензодатчиков стали появившиеся в 1952 году на рынке плёночные тензорезисторы. Они вытравливались на покрытой проводящим материалом плёнке. Таким способом тензорезисторы изготавливаются и сегодня. Ещё в том же году, плёночные тензорезисторы были предложены для измерений крутящего момента. Таким образом были изготовлены первые невращающиеся тензодатчики крутящего момента. Эти датчики помогли решить многие задачи в разработках и испытаниях посредством измерения крутящего момента реакции. Но более важным и частым применением датчиков крутящего момента являются измерения на вращающемся валу. Здесь разработки длились ещё несколько лет, чтобы предложить на рынке готовые к применению тензометрические датчики крутящего момента.
2. Первые вращающиеся датчики крутящего момента
 При нагружении вала аксиальным крутящим моментом происходит его скручивание на угол пропорциональный крутящему моменту. Этот угол может быть измерен при помощи углоизмерительной системы. Работающие по этому принципу вращающиеся датчики крутящего момента с индуктивной измерительной системой были предложены на рынке уже после 1945 года. Для питания датчика использовались несущие частоты в несколько сотен кГц. Таким образом, удалось уменьшить габариты катушек индуктивности системы. Амплитуда переменного измерительного сигнала была пропорциональна углу скручивания измерительного вала датчика крутящего момента и имела ту же частоту, что и напряжение питания.
При нагружении вала аксиальным крутящим моментом происходит его скручивание на угол пропорциональный крутящему моменту. Этот угол может быть измерен при помощи углоизмерительной системы. Работающие по этому принципу вращающиеся датчики крутящего момента с индуктивной измерительной системой были предложены на рынке уже после 1945 года. Для питания датчика использовались несущие частоты в несколько сотен кГц. Таким образом, удалось уменьшить габариты катушек индуктивности системы. Амплитуда переменного измерительного сигнала была пропорциональна углу скручивания измерительного вала датчика крутящего момента и имела ту же частоту, что и напряжение питания.
 Для питания расположенной на вращающемся валу измерительной системы и для передачи модулированного по амплитуде измерительного сигнала применялись трансляторы, построенные по принципу вращающегося трансформатора. Одна обмотка трансформатора закреплена на статоре, вторая расположена концентрично первой на роторе. При передаче амплитудно-модулированного измерительного сигнала через построенный по такой схеме транслятор коэффициент передачи включается напрямую в измерительный сигнал. Из-за аксиальных и радиальных смещений, эксцентричного вращения, изменения магнитных характеристик материала и магнитных утечек могут возникать поргешности в измерениях.
Для питания расположенной на вращающемся валу измерительной системы и для передачи модулированного по амплитуде измерительного сигнала применялись трансляторы, построенные по принципу вращающегося трансформатора. Одна обмотка трансформатора закреплена на статоре, вторая расположена концентрично первой на роторе. При передаче амплитудно-модулированного измерительного сигнала через построенный по такой схеме транслятор коэффициент передачи включается напрямую в измерительный сигнал. Из-за аксиальных и радиальных смещений, эксцентричного вращения, изменения магнитных характеристик материала и магнитных утечек могут возникать поргешности в измерениях.
Первая передача измерительного сигнала тензорезисторного моста, наклеенного на вращающийся вал производилась посредством контактных колец в 1952 году. Передача питающего и выходного напряжения через контактные кольца требует определённой осторожности. Контактные кольца должны быть изолированы от вала и друг от друга. Уже малейшие ошибки в изоляции могут привести к значительным измерительным ошибкам. Сила нажатия скользящего контакта должна быть выбрана так, чтобы с одной стороны сопротивление контакта было возможно малым, надёжность контакта относительно отрывания вследствие сотрясений и эксцентричности контактных колец длжна была быть достаточно высокой и с другой стороны не должно было быть допущено возникновение чрезмерного нагрева и износа контактных пар. Решающую роль помимо выбора материала играет тщательная обработка поверхностей.
Передача питающего и выходного напряжения через контактные кольца требует определённой осторожности. Контактные кольца должны быть изолированы от вала и друг от друга. Уже малейшие ошибки в изоляции могут привести к значительным измерительным ошибкам. Сила нажатия скользящего контакта должна быть выбрана так, чтобы с одной стороны сопротивление контакта было возможно малым, надёжность контакта относительно отрывания вследствие сотрясений и эксцентричности контактных колец длжна была быть достаточно высокой и с другой стороны не должно было быть допущено возникновение чрезмерного нагрева и износа контактных пар. Решающую роль помимо выбора материала играет тщательная обработка поверхностей.
Особенные сложности возникают при высоких скоростях вращения. Некоторые датчики снабжены подъёмными устройствами для щёток, которые опускаются только для измерений. Недостатком данной технологии является то, что контактные кольца и угольные щётки со временем изнашиваются и требуют замены.
 Для создания датчика со стабильной и не требующей технического обслуживания передачей сигнала, была разработана технология, обеспечивающая бесконтактную передачу измерительного сигнала с тензорезисторного моста. Благодаря запитыванию моста переменным напряжением, на его выходе получается пропорциональное крутящему моменту амплитудно-модулированное переменное напряжение. Как необходимое для питания тензометрического моста переменное напряжение, так и измерительный сигнал могут передаваться благодаря трансформаторной передаче.
Для создания датчика со стабильной и не требующей технического обслуживания передачей сигнала, была разработана технология, обеспечивающая бесконтактную передачу измерительного сигнала с тензорезисторного моста. Благодаря запитыванию моста переменным напряжением, на его выходе получается пропорциональное крутящему моменту амплитудно-модулированное переменное напряжение. Как необходимое для питания тензометрического моста переменное напряжение, так и измерительный сигнал могут передаваться благодаря трансформаторной передаче.
После этого, победное шествие вращающихся датчиков крутящего момента на основе тензорезисторов уже невозможно было остановить.
Благодаря постоянно уменьшающимся размерам электроники в 1972 стало возможным разместить на вращающемся валу измерительный усилитель, который служил для питания тензорезисторного моста и подготовки измерительного сигнала. Один трансформаторный транслятор служил для питания датчика, другой — для частотно-модулированной передачи измерительного сигнала.
Тензометрическая техника тем временем развивалась дальше. Сегодня выпускаются датчики крутящего момента как с температурной компенсацией, так и с компенсацией дрейфа сигнала. Большое преимущество тензометрической техники состоит в том, что компенсация помех возможна непосредственно в месте измерения. Температурная зависимость модуля упругости применяемых материалов составляет, например, у стали около 3 % на 100 К изменения температуры. Так как эта величина помехи входит напрямую в коэффициент чувствительности датчика, его необходимо соответствующим образом компенсировать.
У датчиков с углоизмеряющей системой, если и делается компенсация, то она проводится в усилителе. Таким образом здесь обязательно нужно считаться с влиянием температуры. Углоизмеряющие датчики имеют ещё одну проблему в том, что для измерения крутящего момента требуется относительно большой угол скручивания. Это ведёт к мягким торсионным конструкциям, которые позволяют осуществлять только медленные измерительные процессы.
Постоянно уменьшающиеся размеры электроники и соответственно улучшающиеся возможности передачи измерительного сигнала привели к изменению рынка датчиков крутящего момента в том направлении, что теперь они поставляются с интегрированными усилителями.
 Первые датчики крутящего момента имели, как правило, аналоговый выходной сигнал. При таких интерфейсах невозможно исключить помехи исходящие от соседствующих силовых узлов и приводов, особенно при протяженной подводке и высокой динамике. Из-за этого в прошлом увеличивали уровень сигнала датчика. Общепринятые уровни сигнала в ± 5 В и ± 10 В. И всё же, для многих применений помехоустойчивость не достаточна высока. Решение данной проблемы лежит в цифровой сенсорной электронике. Схема её принципиальной механической конструкции представлена на следующей картинке.
Первые датчики крутящего момента имели, как правило, аналоговый выходной сигнал. При таких интерфейсах невозможно исключить помехи исходящие от соседствующих силовых узлов и приводов, особенно при протяженной подводке и высокой динамике. Из-за этого в прошлом увеличивали уровень сигнала датчика. Общепринятые уровни сигнала в ± 5 В и ± 10 В. И всё же, для многих применений помехоустойчивость не достаточна высока. Решение данной проблемы лежит в цифровой сенсорной электронике. Схема её принципиальной механической конструкции представлена на следующей картинке.
 На валу находится суженное по диаметру место, где наклеен тензометрический мост. На валу так же находятся вращающаяся часть трансформаторного транслятора и вращающаяся электроника. В корпусе находится стационарная часть транслятора и остальная электроника. Для подключения датчика, на корпусе находится штекер.
На валу находится суженное по диаметру место, где наклеен тензометрический мост. На валу так же находятся вращающаяся часть трансформаторного транслятора и вращающаяся электроника. В корпусе находится стационарная часть транслятора и остальная электроника. Для подключения датчика, на корпусе находится штекер.
Интегрированная электроника как в статоре, так и в роторе содержит микропроцессор с сопутствующей памятью. Измерительный сигнал генерирутся на роторе посредством тензорезисторов, тут же усиливается и оцифровывается. Цифровой сигнал попадает в процессор, который готовит его к передаче на статор в форме последовательного сигнала с контрольной суммой. В статоре сигнал данных подготавливается и в заключение формируется в процессоре для последовательного интерфейса RS 485.
Благодаря применению процессоров такие данные как серийный номер, калибровочные значения, измерительный диапазон, дата калибровки и прочие могут быть сохранены как на роторе, так и на статоре и при необходимости могут быть считаны.
Питание датчика происходит через контролируемый процессором источник, который может подключить калибровочный контроль для проверки датчика. Благодаря оцифровыванию измерительного сигнала непосредственно на месте его снятия и сохранению, а так же считыванию данных датчика обеспечивается очень высокая эксплуатационная надёжность измерительного устройства.
Блок-схема цифровой передачи измерительного сигнала с интегрированными микропроцессорами:

4. Области применения датчиков крутящего момента сегодня
Некоторые отрасли науки и техники сегодня уже невозможно представить без датчиков крутящего момента. Ниже представлены только некоторые сферы их применения:
Электродвигатели
Характеристические кривые
Мощность
Крутящий момент
Двигатели внутреннего сгорания
Мощность
Крутящий момент