
Двигатель dvd привода схема
AVR-STM-C++
суббота, 6 апреля 2019 г.
Шаговый двигатель из CD/DVD привода
Попались в мои руки несколько приводов оптических дисков, которые я разобрал. В итоге помимо плат и прочей механики стал обладателем нескольких шаговых двигателей, которые позиционируют лазерную головку. Захотелось их как-то использовать, но информации по ним фактически никакой. После продолжительного и настойчивого гугления информацию я таки нашел и решил поделится ею с вами.
Итак, шаговый двигатель cd rom

Он имеет маркировку 0550902, чуть ниже 15RF 172KP, хотя можно прочитать и слитно, получится 15RF172KP. Так же маркировка на шлейфе 3 e232171. С обратной стороны выгравировано SM15DD — это тип винта двигателя.

После длительных поисков datasheet я нашел каталог продукции фирмы MOATECH, в котором и упоминается данный двигатель из сд привода. Это двигатель SPS-15RF-172KP, в каталоге есть небольшое упоминание SPS-15RF Type, где присутствует позиция 172FH.
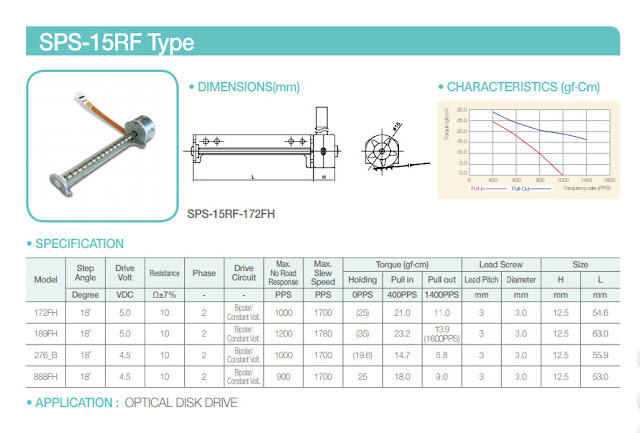
Пусть последние буквы маркировки и не совпадают, но думаю, что это одно и то же. Давайте теперь посмотрим, что же это за шаговик такой.
Характеристики шагового двигателя
В табличке есть данные по сопротивлению обмоток, 10 Ом на обмотку, я проверил — мультиметр показал 10 Ом. Так же можно увидеть угол поворота — 18 градусов на шаг. И, самое важное, напряжение питания двигателя — 5 вольт. Идеально для использования с AVR микроконтроллерами или Arduino.
Этот двигатель dvd привода имеет две фазы, видим, что он биполярный (это должно быть и так ясно, исходя из количества выводов). Для таких двигателей необходимы специальные драйвера управления, в следующей статье будем собирать свой драйвер на полевых транзисторах. Это обусловлено их принципом работы. Давайте посмотрим, как управлять биполярным шаговым двигателем.
Распиновка шагового двигателя
Тут все предельно просто, имеем четыре вывода и две обмотки — по два вывода на обмотку.

Я промаркировал выводы обмоток приписав плюс и минус дабы не путаться где первая обмотка, а где вторая, хотя было бы более правильно написать первый вывод и второй.
Управление биполярным шаговым двигателем
Вот и добрались до вопроса как управлять шаговым двигателем. Это довольно сложный процесс в плане реализации, так как из-за наличия двух фаз нужно подавать напряжение на обмотку в разные стороны. Тоесть в какой-то момент мы подаем плюс на первый вывод первой обмотки, на второй вывод этой же обмотки минус, а в какой-то момент нужно подать наоборот — плюс на второй вывод первой обмотки и минус на первый вывод первой обмотки. Для того, чтоб двигатель вращался, ток на обмотки нужно подавать вот в такой последовательности

Я привел схему подачи тока на биполярный шаговый двигатель в виде четырех полных шагов двигателя. Чтоб двигатель вращался, достаточно после четвертого шага выполнить первый шаг и продолжить дальше. Чтоб двигатель вращался в обратную сторону, то шаги нужно выполнять с обратной последовательности, например 4-3-2-1-4-3. и так далее.
Эта схема управления не такая уж сложная, но в плане подачи тока могут возникнуть затруднения. Но об этом мы поговорим в следующей статье, а сейчас давайте вернемся к нашим двигателям. Я описал только один, а у меня их два.
Второй двигатель выглядит точно так же, как и первый, но имеет другую маркировку — 172F p10816H1. Тем не менее это тот же самый SPS-15RF, который с этой же буквой F после 172 есть в первой позиции таблички из каталога. Так что идентификация обоих двигателей успешно произведена, технические характеристики определены и можно приступать к повторному использованию этих шаговиков.
Опыт изучения Arduino. Подключение шагового двигателя. Часть аппаратная.

Идея подключить шаговый двигатель (ШД) к ардуино и заставить его работать появилась у меня достаточно спонтанно, когда я случайно купил два нерабочих DVD-RW привода за 100 р. на Юноне. После того как один из приводов был раскурочен, в руках у меня оказался вот такой шаговый двигатель.

Чем же отличается шаговый двигатель от обычного коллекторного или асинхронного? Если не вдаваться в детали, то задача обычного двигателя — вращать вал в определенную сторону с определенной частотой, а задача шагового двигателя — повернуть вал в определенную сторону на определенный угол и удерживать его в таком положении.
Покурив интернеты стало ясно, что просто подав питание на его обмотки, многого от него добиться не получится. Минимум что нужно, чтобы заставить ШД хоть как-то функционировать — это плата управления и источник питания. Забегая немного вперед отмечу, что источников питания понадобится два: для питания логической части и АЦП (3-5 В) и для питания силовой части (8-35 В). Кстати, плата очень боится пониженного напряжения в цепях питания двигателя. Я сначала подал 6 В. Пока разобрался в чем дело, спалил две платы. Данные приведены для платы управления на базе распространенного чипа 4988. Вот её схема подключения:
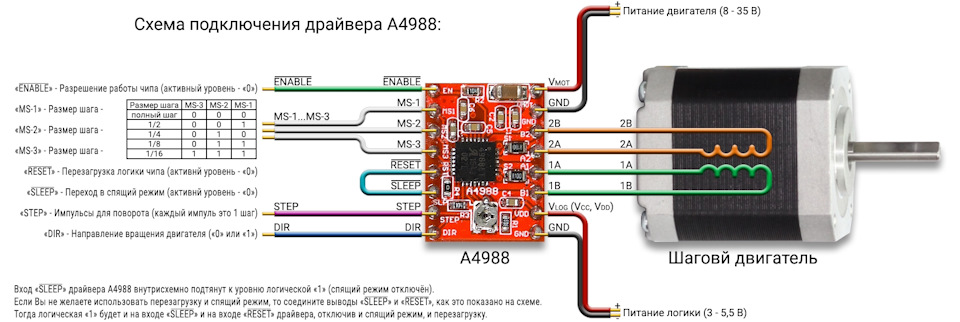
Тут ещё одно замечание. Выводов «в воздухе» быть не должно — все выводы должны быть подключены. Они имеют очень большую чувствительность к помехам.
Как видно на схеме, у двигателя две обмотки, чтобы подключить его к плате, надо определить какой вывод к какой обмотке относится. Я напаял 4 разноцветных провода поверх заводского шлейфа.
Делать нужно именно так. Сам шлейф можно обрезать или просто заизолировать, но отпаивать от выводов обмоток нельзя — выводы провалятся внутрь двигателя и он придёт в негодность.
Когда провода напаяны, приступаю к определению принадлежности выводов к той или иной обмотке. Проще всего это сделать мультиметром в режиме омметра.
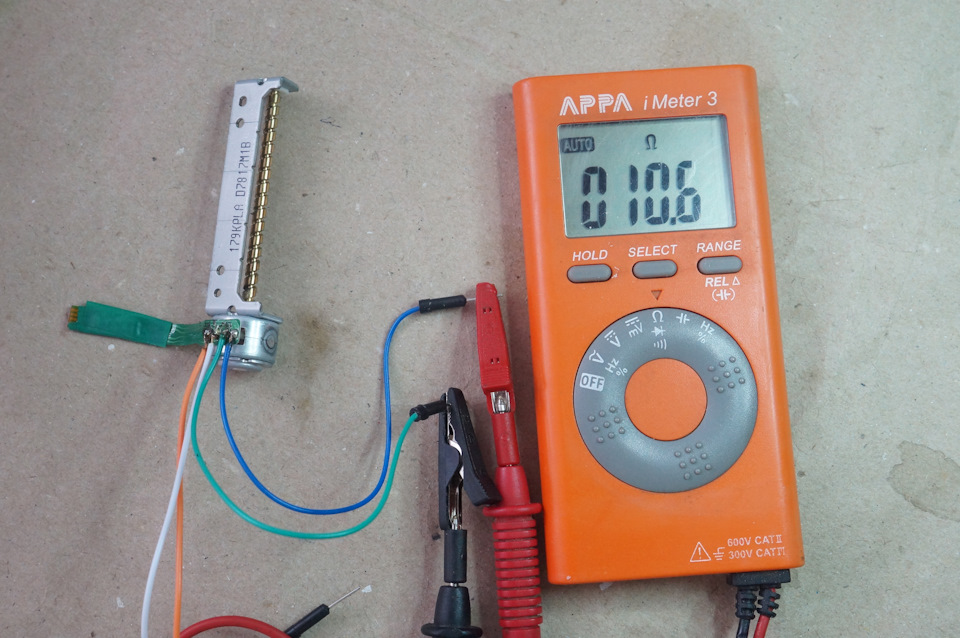
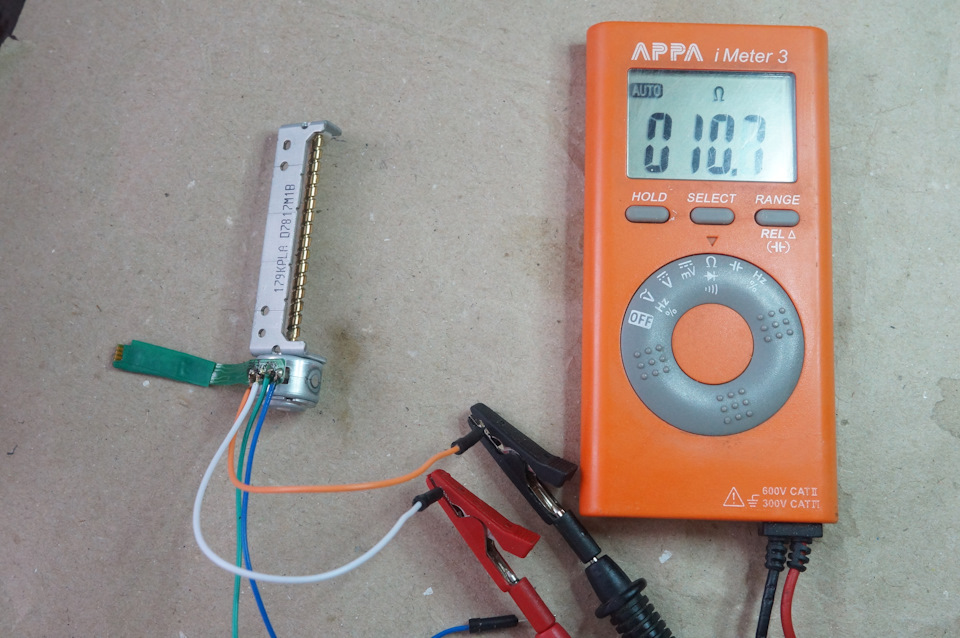
В моем случае синий и зеленый провод это выводы одной обмотки, а оранжевый и белый — другой. Где начало и конец обмотки непринципиально — если двигатель пойдёт не в ту сторону, достаточно поменять местами выводы на любой обмотке.
Теперь проверяю двигатель на отсутствие замыканий между обмотками:
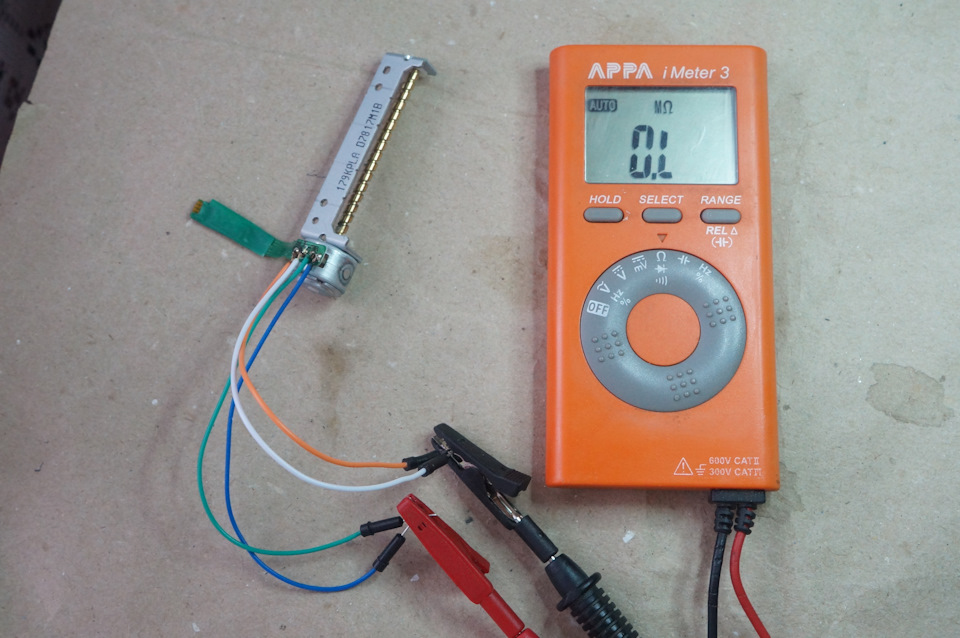
Тут тоже всё в порядке.
Для питания логической части собрал простейший стабилизатор на микросхеме LM7805 по такой схеме:

На выход добавил конденсатор 40 мкФ на 16 В. Стабилизатор и плату управления разместил на макетной плате.
В следующей записи опишу процесс настройки платы и программирование платы ардуино. На следующем фото небольшая превьюшка следующей части)
Вторая жизнь DVD
Александр Чечин
Не спешите выбрасывать свой старый СD или DVD-привод, даже если он разучился читать диски. В его конструкции есть несколько очень интересных деталей, которые можно использовать в своих проектах. Чаще всего из CD/DVD извлекают двигатели. Особенно ценным является механизм точного позиционирования головки чтения/записи, содержащий биполярный шаговый двигатель.

В интернете легко найти массу примеров плоттеров, лазерных граверов, станков с программным управлением или даже 3d принтеров на базе нескольких конструктивов CD/DVD. Например, вот такой супер дешевый 3d принтер:
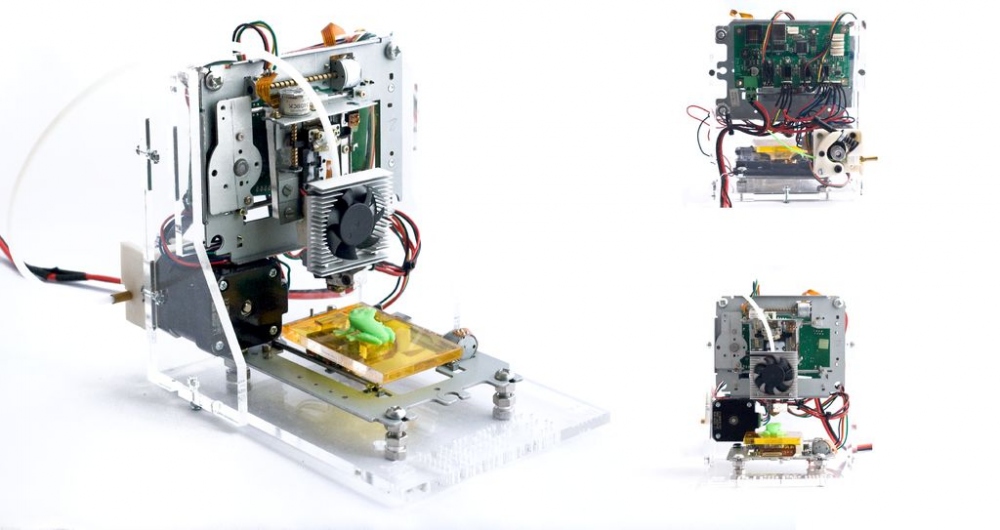
Однако скетчей и необходимого софта для управления всем этим хозяйством у авторов подобных самоделок найти практически невозможно. Сложно найти даже схему подключения таких моторов.
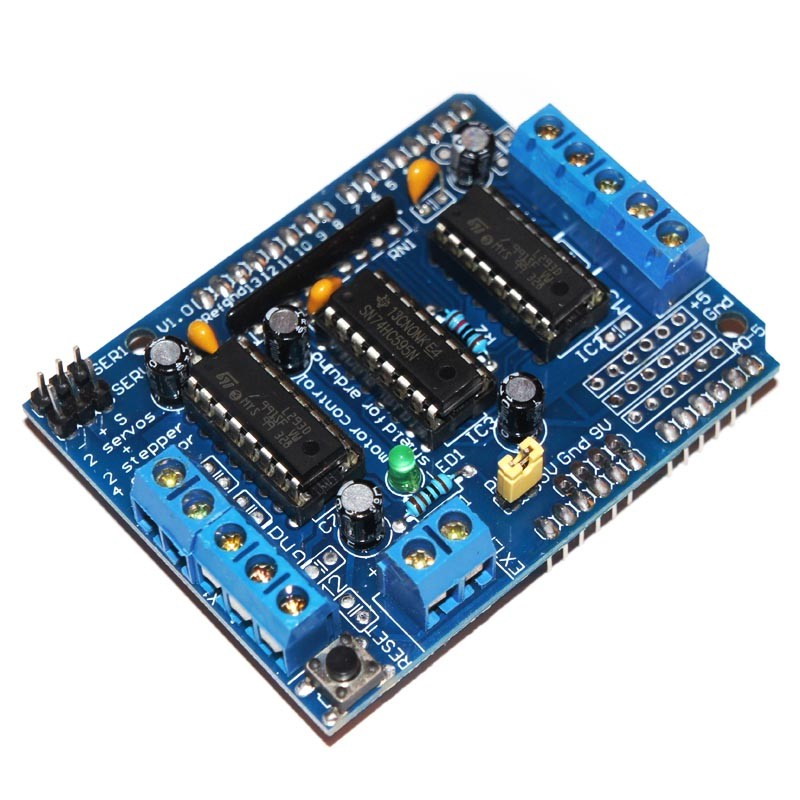
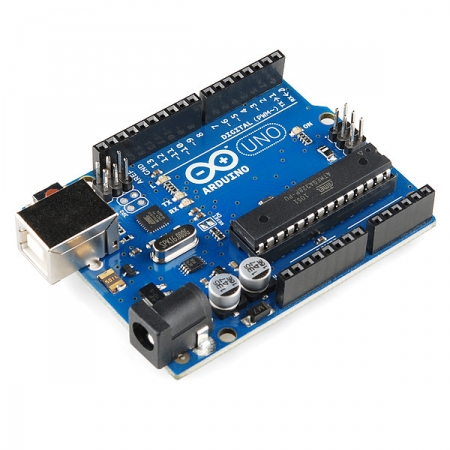
Сегодня мы научимся подключать шаговый двигатель от CD/DVD привода и управлять им при помощи Arduino. Использовать будем только стандартные средства, которые легко приобрести: Arduino UNO, «адафрутовский» моторшилд и беспаечную макетку. У любого «ардуинщика» подобные средства всегда в наличии.
Разобираем DVD и извлекаем из него механизм передвижения головок. Шаговый двигатель подсоединяется к материнской плате привода плоским шлейфом, который можно просто отрезать. Искомая деталь выглядит приблизительно так.
.jpg)
Разобираем DVD и извлекаем из него механизм передвижения головок. Шаговый двигатель подсоединяется к материнской плате привода плоским шлейфом, который можно просто отрезать. Искомая деталь выглядит приблизительно так.
.JPG)
Припаяем к контактам двигателя провода, если провода одного цвета, то условные начала обмоток, чтобы далее не запутаться, отметим красным маркером.
.jpg)
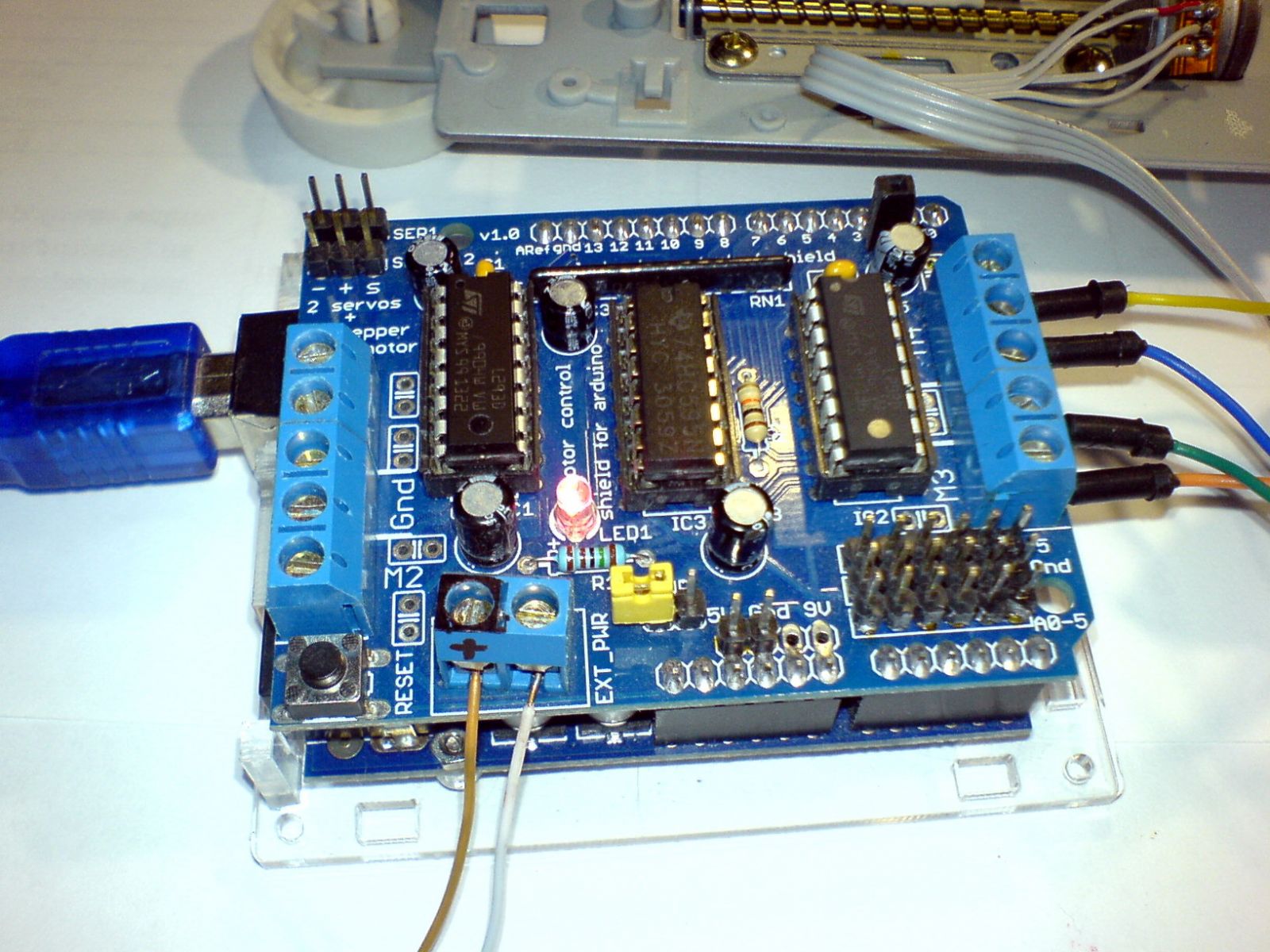
Соберем схему. Моторшилд может управлять двумя биполярными шаговиками, которые подключают к винтовым клемникам М1/М2 или М3/М4, каждая из обмоток — к своему «М». Если вы случайно перепутаете обмотки или подключите свой двигатель к клемникам иначе, ничего страшного не произойдет, возможно, двигатель изменит направление вращения или просто не запустится. Исправьтесь.
.JPG)
Максимальная величина тока через обмотки шагового двигателя данного типа может достигать 500 мА, поэтому для мотора нужно использовать отдельный блок питания соответствующей мощности, а перемычку на плате моторшилда нужно обязательно снять! Напряжение питания шагового двигателя 5В. Соблюдайте полярность при подключении блока питания к моторшилду.
.JPG)
Скетч для «подвигать мотором» очень простой. Используем только стандартную библиотеку AFMotor и ее возможности. Скорости и настройки подбираем экспериментально.
//создаем экземпляр класса AF_Stepper под названием motor_1
//задаем число шагов на оборот двигателя (200) и
//клемник (2 — М3/М4), к которому подключен двигатель
AF_Stepper motor_1(200, 2);
//задаем скорость хода каретки привода
motor_1.setSpeed(10);
//двигаем каретку привода на 250 шагов вперед
motor_1.step(250, FORWARD, MICROSTEP);
//двигаем каретку привода на 250 шагов назад
motor_1.step(250, BACKWARD, MICROSTEP);
delay(100);
Запускаем и наслаждаемся работой механизма.
Первый шаг к домашнему станку с программным управлением, граверу или 3d принтеру сделан. Поздравляю!
Принцип работы DVD привода
Лабораторная работа № 4
Тема: Дисковод (привод)
Цель: Знать внутренности привода, как работает, DVD – диски.
Пояснение к работе.
Устpойство пpивода CD-ROM.
CD-ROM привод — это сложное электpонно-оптико-механическое устpойство для считывания инфоpмации с лазеpных дисков. Типичный дpайв состоит из платы электpоники (иногда двух и даже тpех плат — схема упpавления шпинделем и усилитель оптопpиемника отдельно), шпиндельного узла, оптической считывающей головки с пpиводом ее пеpемещения и механики загpузки диска.

Типовой привод состоит из платы электроники, шпиндельного двигателя, системы оптической считывающей головки и системы загрузки диска. Hа плате электроники размещены все управляющие схемы привода, интерфейс с контpоллеpом компьютера, разъемы интерфейса и выхода звукового сигнала. Большинство приводов использует одну плату электроники, однако в некоторых моделях отдельные схемы выносятся на вспомогательные небольшие платы.

Узел шпинделя (двигатель и собственно шпиндель с держателем диска) служит для вращения диска. Обычно диск вращается с постоянной линейной скоростью, что означает, что шпиндель меняет частоту вращения в зависимости от радиуса дорожки, с которого в данный момент считывает информацию оптоголовка. При перемещении головки от внешнего радиуса диска к внутреннему диск должен быстро увеличить скорость вращения примерно вдвое, поэтому от шпиндельного двигателя требуется хорошая динамическая характеристика. Двигатель используется как для разгона, так и для торможения диска.
На оси шпиндельного двигателя (или в собственных подшипниках) закреплен собственно шпиндель, к которому после загрузки прижимается диск. Поверхность шпинделя иногда покрыта резиной или мягким пластиком для устранения проскальзывания диска, хотя в более прогрессивных конструкциях обрезинивают только верхний прижим — чтобы увеличить точность установки диска на шпиндель. Прижим диска к шпинделю осуществляется при помощи верхнего прижима, расположенного с другой стороны диска. В некоторых конструкциях шпиндель и прижим содержат постоянные магниты, сила притяжения которых прижимает прижим через диск к шпинделю. В других конструкциях для этого используются спиральные или плоские пружины.
Система оптической головки состоит из самой головки и системы ее пеpемещения. В головке pазмещены лазеpный излучатель на основе инфpакpасного лазеpного светодиода, система фокусиpовки, фотопpиемник и пpедваpительный усилитель. Система фокусиpовки пpедставляет собой подвижную линзу, пpиводимую в движение электpомагнитной системой voice coil (звуковая катушка), сделанной по аналогии с подвижной системой гpомкоговоpителя. Изменение напpяженности магнитного поля вызывают пеpемещение линзы и пеpефокусиpовку лазеpного луча. Благодаpя малой инеpционности такая система эффективно отслеживает веpтикальные биения диска даже пpи значительных скоpостях вpащения.
Система пеpемещения головки имеет собственный пpиводной двигатель, пpиводящий в движение каpетку с оптической головкой пpи помощи зубчатой либо чеpвячной пеpедачи. Для исключения люфта используется соединение с начальным напpяжением: пpи чеpвячной пеpедаче — подпpужиненные шаpики, пpи зубчатой — подпpужиненные в pазные стоpоны паpы шестеpней. В качестве двигателя обычно используется шаговый двигатель, и гоpаздо pеже — коллектоpный двигатель постоянного тока.
Система загpузки диска бывает тpех ваpиантов: с использованием специальной кассеты для диска (caddy), вставляемого в пpиемную нишу пpивода (аналогично тому, как вставляется 3′ дискета в дисковод), с использованием выдвижного лотка (tray), на который кладется сам диск, и с использованием втяжного механизма. Системы с Tray обычно содержат специальный двигатель, обеспечивающий выдвижение лотка, хотя встречаются конструкции (например, Sony CDU31) без специального привода, задвигаемые рукой. Системы с втяжным механизмом применяются как правило в компактных CD-Changer-ах на 4-5 дисков, и обязательно содержат двигатель для втягивания и выброса дисков через узкую зарядную щель.
На передней панели привода обычно расположены кнопка Eject для загрузки/выгрузки диска, индикатор обращения к приводу и гнездо для подключения наушников с электронным или механическим регуля- тором громкости. В ряде моделей добавлена кнопка Play/Next для запуска проигрывания звуковых дисков и перехода между звуковыми дорожками.
Большинство приводов также имеет на передней панели небольшое отверстие, предназначенное для аварийного извлечения диска в тех случаях, когда обычным способом это сделать невозможно — например, при выходе из строя привода лотка или всего CD-ROM, при пропадании питания и т.п. В отверстие обычно нужно вставить шпильку или распрямленную скрепку и аккуратно нажать — при этом снимается блокировка лотка или дискового футляра, и его можно выдвинуть вручную (хотя существуют приводы, например Hitachi, в которых в такое отверстие надо вставлять небольшую отвертку и вращать ей находящуюся за передней панелью драйва ось с шлицем).

Принцип работы DVD привода
Из чего состоит?
1. Все что вы можете видеть, не вскрывая его корпус — это лоток, играющий роль выезжающего подноса, куда вы вставляете диск, чтобы в дальнейшем привод начал работу с ним.
2. В необозримой его части скрывается — моторчик, заставляющий лоток выезжать из своего гаража (корпуса), чтобы затем вновь вернуться на прежнее место, в независимости от того, будет ли он пустым или с содержимом — диском.
3. Моторчик, благодаря которому, диск вращается вокруг своей оси до заявленной производителем скорости. Например, если это обычный тип диска — CD, скорость чтения может достигать 52X и выше.
4. Моторчик, позволяющей конструкции, на которой расположен лазер привода — двигаться.
5. Плата — играющая основную роль в функционировании. Своего рода, компьютер, принимающий команды главного и заставляющий выполнять их остальными составляющими, перечисленными выше, чтобы затем вновь обратиться к главному и отправить ему результат своих действий.
Как работает?
1. Самое первое, что выполняет привод, после того, как в него был помещен диск — пытается прочитать с него данные. Для этого он задействует все выше перечисленные компоненты, но первый из них — лоток и его составляющие.
2. Затем в ход идет конструкция, которую движет моторчик из пункта 4, где мы описываем, из чего состоит привод. На ней размещен лазер, который выбрасывает «световой пучок».
3. Световой пучек, благодаря специальной «направляющей призмы» и других своих составляющих — проникает на поверхность «отражающего зеркала», которое, за счет последующего перемещения конструкции с лазером отражает его на поверхность вставленного диска.
4. Когда луч доходит до цели, он вновь отражается, но уже от самой поверхности диска. Отраженный от диска луч вновь оказывается у «отражающего зеркала». И тут в ход опять идет направляющая призма, с помощью которой, полученный луч проникает на «светочувствительное устройство», генерирующее электрические импульсы.
5. Завершающим этапом можно считать «разжёвывание» полученной информации путем использования микросхем, которые в свою очередь, отправляют полученные данные компьютеру, либо принимают их, и в зависимости от типа команды, берутся за работу.
Емкость дисков DVD (слои и стороны)
В настоящее время существует четыре основных типа дисков DVD, которые классифицируются по количеству сторон (одно- или двухсторонние) и слоев (одно- и двухслойные).
· DVD-5 — односторонний однослойный диск емкостью 4,7 Гбайт. Состоит из двух соединенных друг с другом подложек. Одна из них содержит записанный слой, который называется нулевым слоем, вторая совершенно пуста. На однослойных дисках обычно используется алюминиевое покрытие.
· DVD-9 — односторонний двухслойный диск емкостью 8,5 Гбайт. Состоит из двух штампованных подложек, соединенных таким образом, что оба записанных слоя находятся с одной стороны диска; с другой стороны располагается пустая подложка. Внешний (нулевой) штампованный слой покрыт полупрозрачной золотой пленкой, которая отражает лазерный луч, сфокусированный на данном слое, и пропускает луч, который сфокусирован на нижнем слое. Для считывания обоих слоев используется один лазер с изменяемой фокусировкой.
· DVD-10 — двухсторонний однослойный диск емкостью 9,4 Гбайт. Состоит из двух штампованных подложек, соединенных друг с другом тыльными сторонами. Записанный слой (нулевой слой на каждой стороне) обычно имеет алюминиевое покрытие. Обратите внимание, что диски этого типа являются двухсторонними; считывающий лазер находится в нижней части накопителя, поэтому для чтения второй стороны диск необходимо извлечь и перевернуть.
· DVD-18 — двухсторонний двухслойный диск емкостью 17,1 Гбайт. Объединяет в себе два слоя записи на каждой стороне. Стороны диска, каждая из которых формируется двумя штампованными слоями, соединяются вместе тыльными частями друг к другу. Внешние слои (слой 0 на каждой стороне диска) покрыты полупрозрачной золотой пленкой, внутренние слои (слой 1 на каждой стороне) имеют алюминиевое покрытие. Отражательная способность однослойного диска составляет 45–85%, двухслойного — 18–30%. Различные отражающие свойства компенсируются схемой автоматической регулировки усиления (АРУ).

