
Двигатели постоянного тока момент характеристика
Двигатели постоянного тока момент характеристика

Двигатели постоянного тока обычного исполнения имеют ценное качество-возможность широко и плавно регулировать скорость вращения. Вместе с тем они обладают существенным недостатком, обусловленным щеточно-коллекторным узлом. Вполне естественно, что появилась мысль создать двигатели, обладающие достоинствами двигателей постоянного тока и свободные от их недостатков. Такие двигатели называются бесконтактными двигателями постоянного тока.

Рис.5.1. Структурная схема бесконтактного двигателя постоянного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 5.1):
1) бесконтактного двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
2) датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
3) коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
Принцип действия бесконтактного двигателя рассмотрим на примере упрощенной схемы (рис. 5.2). В ее состав входит двигатель с тремя обмотками на статоре, сдвинутыми в пространстве на 120 градусов и соединенными в звезду, ДПР с одним сигнальным элементом (СЭ) и тремя чувствительными элементами (ЧЭ) (их число равно числу обмоток статора), коммутатор, выполненный на трех транзисторах, работающих в ключевом режиме, т.е. в режиме «закрыт» или «открыт».

Рис. 5.2. Упрощенная принципиальная схема бесконтактного двигателя постоянного тока
В положении, показанном на рис.5.2, сигнальный элемент через чувствительный элемент «А» открывает транзистор ТА. По обмотке А протекает ток IА. Намагничивающая сила обмотки FА взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение (1-й такт на рис. 5.3). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший 30° СЭ будет воздействовать сразу на два ЧЭ: на «А» и на «В». Это значит, что будут открыты сразу два транзистора: ТА и ТВ. Ток будет протекать по обеим обмоткам А и В. Появится результирующая НС статора FАВ, которая повернется на 60° по сравнению с первым положением (2-й такт на рис. 5.3).

Рис. 5.3. Первых 3 такта в работе бесконтактного двигателя постоянного тока
Эта НС продолжает взаимодействоватьс полем постоянного магнита; двигатель продолжает развивать вращающий момент.
Когда угол поворота станет чуть больше 90°, транзистор ТА закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с НС этой обмотки, однако вращающий момент по прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3-й такт на рис. 5.3). В конечном итоге двигатель разовьет такую скорость, при которой его момент будет уравновешиваться моментом нагрузки.
Если бы бесконтактный двигатель имел обмоток, чувствительных элементов и транзисторов столько же, сколько обычный двигатель имеет коллекторных пластин, то по своим свойствам и характеристикам они ничем бы не отличались друг от друга. Однако увеличение числа элементов сильно усложняет конструкцию машины. Поэтому в реальных двигателях число обмоток, а соответственно, и число чувствительных элементов и транзисторов не превышает 3-4.
Малое число обмоток обусловливает ряд особенностей работы бесконтактного двигателя постоянного тока.
1. Пульсация вращающего момента — возникает вследствие скачкообразного перемещения НС статора (см. положения 1,2,3 рис. 5.3). В соответствии с общими законами электромеханического преобразования энергии момент бесконтактного двигателя может быть определен как скалярное произведение магнитного потока ротора и НС взаимодействующих обмоток статора
 | (5.1) |
где: см — постоянный коэффициент; q — угол между потоком ротора и НС статора.
Так как при вращении двигателя угол q непрерывно меняется, то и момент двигателя не остается постоянным.
2. Реакция якоря периодически изменяется, становясь то поперечной, то продольно намагничивающей, то продольно размагничивающей (рис. 5.4). Объясняется это опять-таки скачкообразным перемещением НС статора (якоря). Размагничивающее действие поля статора особенно сильно при пуске двигателя, т.к. при этом противо-ЭДС равна 0, а ток — наибольший. С этим необходимо считаться при выборе постоянных магнитов, стабилизация которых происходит в режиме короткого замыкания.

Рис. 5.4. Реакция якоря в бесконтактном двигателе постоянного тока
3. Пульсация токов в обмотках статора и суммарного тока двигателя объясняется дискретным питанием обмоток (в тот момент, когда открыты два транзистора, потребляемый ток вырастает в два раза по сравнению с режимом, когда открыт только один транзистор).
4. Влияние индуктивности обмоток статора.В обычном двигателе секции якоря маловитковые, поскольку общее число витков якоря делится на большое число секций. Индуктивность таких секций сравнительно небольшая. В бесконтактном двигателе общее число витков якоря разбивается на 3-4 обмотки (секции). В результате секции получаются многовитковыми, а, следовательно, обладающими большой индуктивностью т.к. L
С учетом ряда допущений уравнение напряжения для якоря можно записать в виде
 (5.2)
(5.2)
Решая его относительно тока, получим
 | (5.3) |
где Т = L/r — электромагнитная постоянная времени.
Выражение перед круглой скобкой есть ток якоря при отсутствии индуктивности. Тогда
 (5.4)
(5.4)
При больших скоростях, когда время коммутации невелико, ток в обмотках не успевает достигать установившегося значения. Его эффективное значение становится меньше, чем при L = 0
Вращающий момент прямо пропорционален току якоря, поэтому
 | (5.5) |
 (5.6)
(5.6)
Анализ выражения (5.6) показывает, что момент имеет две составляющие. Первую — не зависящую от времени. Она равна моменту при отсутствии индуктивности. Вторую — переменную. Она появляется из-за индуктивности обмоток. Эта составляющая при всех скоростях имеет отрицательное значение (U > E). Поэтому можно утверждать, что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий момент обычного коллекторного двигателя.
Подставим значение ЭДС Е = сеnФ в формулу (5.6), получим механическую характеристику бесконтактного двигателя
 (5.7)
(5.7)
Выразим эту характеристику в относительных единицах, приняв за базисный момент пусковой момент (n = 0, U = Uном), а за базисную скорость — скорость холостого хода (М = 0, U = Uном ). Время t = ¥


Рис. 5.6. Механические характеристики бесконтактного двигателя постоянного тока при разных значения α и L: L2 > L1 > 0
Разделим обе части уравнения (5.7) на Мп:
 (5.8)
(5.8)
Обозначим a = U/Uном. С учетом n = U/(сеФ) получим
 (5.9)
(5.9)
где n = n/n — относительная скорость двигателя.
На рис. 5.6 показаны механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
§ 5.1. Датчики положения ротора
Датчики положения ротора определяются их чувствительными элементами, которые могут быть построены с использованием ЭДС Холла, фотоэффекта и т.д.

Рис. 5.7. Датчик положения ротора трансформаторного типа
Достаточно широкое распространение получили датчики электромагнитного – трансформаторного типа. На рис. 5.7. показан один из них.
Чувствительными элементами датчика являются три трансформатора (Тр1, Тр2, Тр3), сдвинутыми в пространстве на 120 эл. град. Сердечники трансформаторов выполняются из быстронасыщающихся материалов – феррита, пермалоя и тр. Первичные обмотки трансформаторов (I) питаются напряжением высокой частоты (порядка нескольких килогерц) от маломощного источника. Вторичные обмотки через диоды включаются в базы соответствующих транзисторов.
Ротор датчика состоит из постоянного магнита 1, полюсного наконечника 2, выполненного из магнитомягкого материала, и немагнитного полуцилиндра 3.
Элементам конструкции датчика придаются такие формы и они располагаются так, чтобы сердечники трансформаторов, перекрытые полюсным наконечником 2, были насыщенными. В этом случае ЭДС вторичных обмоток трансформаторов (II) практически равны нулю и сигналы на базы транзисторов не поступают. Управляющие сигналы поступают только от тех трансформаторов, сердечники которых не насыщены.
Вопросы: 1) Нарисуйте диаграмму НС обмоток статора (подобную положениям 1,2,3 на рис. 5.3) при условии, что дуга чувствительного элемента не 180° , а 120° .
2) Чему равна величина суммарного тока, потребляемого двигателем из сети, при различных углах поворота ротора и дуге ЧЭ в 120° ?
Характеристики двигателей постоянного тока. Обычно рассматривают три основные характеристики двигателей постоянного тока:
Обычно рассматривают три основные характеристики двигателей постоянного тока:
Все характеристики, отражающие взаимосвязь между током якоря, механическим моментом на валу двигателя и частотой вращения якоря зависят от способа возбуждения двигателя, поэтому они рассматриваются отдельно для каждой схемы возбуждения двигателя.
3.4.1. Характеристики двигателей с независимым
и параллельным возбуждением
Скоростной характеристикой называют зависимость частоты вращения якоря от тока якоря двигателя  при постоянном напряжении питания U = const, равном номинальному напряжению, и постоянном токе возбуждения Iв = const.
при постоянном напряжении питания U = const, равном номинальному напряжению, и постоянном токе возбуждения Iв = const.
Для получения функциональной зависимости скорости вращения якоря от тока воспользуемся уравнением электрического равновесия двигателя
 .
.
Из этого уравнения получаем выражение для частоты вращения
 .
.
В полученной формуле от тока якоря зависят две составляющие: произведение Rя Iя и результирующий магнитный поток машины  .
.
 Рис. 3.4 Рис. 3.4 |
Произведение RяIя, равное падению напряжения на сопротивлении цепи якоря, приводит к пропорциональному уменьшению частоты вращения при увеличении тока якоря. Магнитный поток машины при увеличении тока якоря из-за реакции якоря несколько уменьшается. Эта зависимость магнитного потока от тока якоря нелинейная, поэтому и скоростная характеристика двигателей с независимым и параллельным возбуждением нелинейная (рис. 3.4).
В зависимости от соотношения влияния на частоту вращения падения напряжения Rя Iя и изменения магнитного потока двигателя характеристика скорости может иметь различный вид. На рис. 3.4 кривая 1 представляет собой характеристику скорости двигателя, у которого влияние Rя Iя преобладает перед влиянием потока , кривая 3 представляет собой скоростную характеристику двигателя, у которого влияние потока преобладает перед влиянием падения напряжения на сопротивлении цепи якоря Rя Iя .
Чаще всего встречаются двигатели, у которых уменьшение частоты вращения за счет падения напряжения на сопротивлении цепи якоря преобладает перед влиянием реакции якоря, приводящей к уменьшению магнитного потока.
Характеристикой момента называют зависимость механического момента на валу двигателя от тока якоря  при постоянном номинальном напряжении питания U = Uн = const и при постоянном номинальном токе возбуждения Iв= Iвн = const.
при постоянном номинальном напряжении питания U = Uн = const и при постоянном номинальном токе возбуждения Iв= Iвн = const.
Ток якоря ненагруженного двигателя не равен нулю. Это объясняется наличием потерь в двигателе, работающем без нагрузки. Такой ток называется током холостого хода Iяо двигателя.
Используя ранее полученную формулу для определения механического момента на валу двигателя, получаем для двигателя, работающего в режиме холостого хода, формулу:  .
.
Нагруженный двигатель при токе якоря Iя развивает механический момент  . Этот развиваемый момент называют электромагнитным.
. Этот развиваемый момент называют электромагнитным.
Механический момент на выходе двигателя равен разности электромагнитного момента и момента холостого хода  .
.
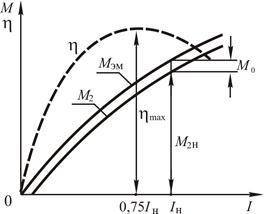 Рис. 3.5 Рис. 3.5 |
При неизменной величине магнитного потока зависимости  и
и  являются прямыми линиями. Однако магнитный поток машины несколько уменьшается при увеличении тока якоря Iя из-за реакции якоря, поэтому характеристики и
являются прямыми линиями. Однако магнитный поток машины несколько уменьшается при увеличении тока якоря Iя из-за реакции якоря, поэтому характеристики и  не являются прямолинейными (рис. 3.5). Максимальное значение тока якоря, при котором якорь ненагруженного двигателя (М2 = 0) начинает вращаться, называют током трогания. Электромагнитный момент в этом случае равен моменту холостого хода.
не являются прямолинейными (рис. 3.5). Максимальное значение тока якоря, при котором якорь ненагруженного двигателя (М2 = 0) начинает вращаться, называют током трогания. Электромагнитный момент в этом случае равен моменту холостого хода.
Особый интерес представляет график зависимости КПД машины от тока якоря (см. рис. 3.5). КПД равен нулю при токах, меньших тока холостого хода или тока трогания (М2 = 0 и Р2 = 0). При дальнейшем увеличении тока КПД увеличивается и достигает максимального значения при токе якоря, равном примерно 0,75Iян. При больших токах КПД начинает уменьшаться. КПД двигате-
лей средней и большой мощности при номинальном токе достига-ет 85 – 95 %.
Основной характеристикой двигателя постоянного тока является механическая характеристика.
Механической характеристикой называют зависимость частоты вращения якоря n от механического момента на валу двигате-
ля M2 при постоянном напряжении питания и постоянном токе возбуждения, т. е.  . В дальнейших рассуждениях будем предполагать, что электромагнитный момент равен механическому моменту на выходе двигателя
. В дальнейших рассуждениях будем предполагать, что электромагнитный момент равен механическому моменту на выходе двигателя  .
.
Особую роль играет механическая характеристика двигателя при номинальном напряжении питающей сети U = Uн = const и номинальном токе возбуждения Iв = Iвн = const. Такую механическую характеристику называют естественной. Рассматривают и другие механические характеристики, выражающие ту же зависимость  , но при других условиях работы, т. е. при других значениях напряжения, при других токах возбуждения и при различных сопротивлениях реостатов, включенных последовательно с якорем. Такие механические характеристики называют искусственными.
, но при других условиях работы, т. е. при других значениях напряжения, при других токах возбуждения и при различных сопротивлениях реостатов, включенных последовательно с якорем. Такие механические характеристики называют искусственными.
Найдем аналитическое уравнение, описывающее механическую характеристику.
В уравнении электрического равновесия  . ПротивоЭДС обмотки якоря
. ПротивоЭДС обмотки якоря  . Следовательно,
. Следовательно, 
=  . Из полученного уравнения
. Из полученного уравнения  . Но из уравнения для определения момента
. Но из уравнения для определения момента  и
и  .
.
Тогда  .
.
Обозначим  и
и  . Можно написать
. Можно написать  .
.
Полученное уравнение является уравнением прямой линии.
Уравнение состоит из двух слагаемых. Первое слагаемое не зависит от момента, а второе слагаемое прямо пропорционально механическому моменту М.
Очевидно то, что механическая характеристика (рис. 3.6) двигателя постоянного тока выражается прямой линией. Такую прямую можно провести через две точки, положение которых на графике можно найти следующим образом: в режиме идеального холостого хода момент двигателя равен нулю  , и якорь вращается с частотой
, и якорь вращается с частотой  , а при номинальном напряжении
, а при номинальном напряжении  .
.

Это первая точка механической характеристики. Положение другой точки определяется из условий пуска двигателя. При подключении двигателя в сеть в начальный момент времени из-за инерционности якоря частота вращения равна нулю n= 0. Противо-ЭДС обмотки якоря тоже равна нулю, и тогда приложенное напряжение падает только на сопротивлении якорной цепи. Ток якоря в этом случае достигает больших величин из-за малости Rя. Его называют пусковым током Iяп. Сила пускового тока определяется из уравнения  .
.
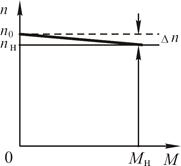 Рис. 3.7 Рис. 3.7 |
Механический момент, развиваемый двигателем, в этом случае называют пусковым моментом Мп , и его величина определяется формулой
 .
.
Общий вид естественной механической характеристики показан на рис. 3.7.
Двигатели с параллельным возбуждением имеют пусковой момент в 10…20 раз больше номинального, поэтому рабочая часть механической характеристики, ограниченная режимом холостого хода (М = 0) и номинальным значением момента на валу  , занимает лишь начальную часть полной характеристики (см. рис. 3.6), в пределах которой частота вращения изменяется незначительно. Такая механическая характеристика, когда при изменении механического момента от нулевого значения до номинального значения частота вращения изменяется незначительно, называется жесткой (см. рис. 3.7). Величина
, занимает лишь начальную часть полной характеристики (см. рис. 3.6), в пределах которой частота вращения изменяется незначительно. Такая механическая характеристика, когда при изменении механического момента от нулевого значения до номинального значения частота вращения изменяется незначительно, называется жесткой (см. рис. 3.7). Величина  весьма невелика.
весьма невелика.
Исследование характеристик двигателя постоянного тока независимого возбуждения
Задание 1
Исследование статических и динамических характеристик в одномассовой электромеханической системе с двигателем постоянного тока независимого возбуждения
Двигатель постоянного тока независимого возбуждения подключен по схеме, приведенной на рис. 1.

Вышеприведенная система математически описывается системой дифференциальных уравнений:

где U я , U в , – напряжение на обмотке якоря и возбуждения (ОВД),
i я , i в , – ток якоря и обмотки возбуждения,
R я , R в – сопротивление якоря и обмотки возбуждения,
L я , L в – индуктивность якоря и обмотки возбуждения,
Ф – магнитный поток обмотки возбуждения,
K – конструктивный коэффициент,
М – электромагнитный момент двигателя,
М с — момент статического сопротивления двигателя,
J — момент инерции двигателя,

По приведенным уравнениям составим математическую модель двигателя постоянного тока независимого возбуждения ( рис. 2).


Исходные данные для двигателя П 61 мощности P Н = 11 кВт:
номинальное напряжение питания U н =220 В,
номинальная скорость вращения n = 1500 об/мин,
номинальный ток в цепи якоря I я. н. = 59,5 А,
сопротивление цепи якоря R Я = 0,187 Ом,
сопротивление обмотки возбуждения R В = 133 Ом,
число активных проводников якоря N = 496,
число параллельных ветвей якоря 2 a = 2,
число витков полюса обмотки возбуждения w в =1800,
полезный магнитный поток одного полюса Ф = 8,2 мВб,
номинальный ток возбуждения обмотки возбуждения
максимальная допускаемая частота вращения 2250 об/мин,
момент инерции якоря J 1 = 0,56 кг м 2 ,
двигатель двухполюсный 2 P n =2,
масса двигателя Q = 131 кг.
Произведем необходимые расчеты.

Конструктивный коэффициент двигателя

Постоянная времени цепи возбуждения


Постоянная времени цепи якоря

Коэффициент К ф

Все полученные данные подставляем в структурную схему (рис. 2) и проведем ее моделирование с помощью программного пакета Matlab . Величины U я = U в = U с подаются на входы схемы ступенчатым воздействием. На выходе снимаем значение скорости вращения двигателя 1 . Динамическая характеристика двигателя (график изменения скорости 1 ( t ) при номинальных параметрах и М с =0) изображена на рис. 3. График показывает выход скорости на установившееся значение при включении двигателя.
График изменения скорости КФ( t ) приведен на рис. 4.

Рис. 3 – Переходная характеристика для одномассовой
системы в режиме холостого хода.
Рис. 4 – Процесс изменения КФ( t ).
Из графика находим: 
Расчетное значение: 
Как мы видим, расчетное значение значительно отличается от значения, полученного экспериментально при моделировании системы. Это объясняется тем, что расчеты мы выполняли по эмпирическим формулам и не учли все параметры модели. Однако для нас наиболее важно получить качественные характеристики, а не количественные. А это наша модель позволяет сделать.
Статическая характеристика двигателя – это изменение установившейся скорости вращения двигателя 1 при изменении тока якоря I я (электромеханическая характеристика) или нагрузки М с (механическая характеристика). Для получения электромеханической характеристики последовательно изменяют I c =0, I н А и снимают установившееся значение скорости 1 . По полученным значениям строят график.
Таким образом получают естественную электромеханическую характеристику. Искусственные электромеханические характеристики получают при изменении U c , R я и Ф. Зависимость 1 от этих величин описывается формулой:  Итак, значение 1 при I c =0, нами уже получено ранее (см. рис. 3). Теперь мы изменяем значение I c , которое становится равным I н =59,5 А и получаем переходный процесс (см. рис. 5).
Итак, значение 1 при I c =0, нами уже получено ранее (см. рис. 3). Теперь мы изменяем значение I c , которое становится равным I н =59,5 А и получаем переходный процесс (см. рис. 5).

Из графика находим:

 .
.
Естественная электромеханическая характеристика приведена на рис. 6.

Для получения механической характеристики последовательно изменяют М с =0, М н Нм и снимают установившееся значение скорости 1 . По полученным значениям строят график. Таким образом получают естественную механическую характеристику. Искусственные механические характеристики получают при изменении U c , R я и Ф.
Зависимость 1 от этих величин описывается формулой:
 .
.
Итак, значение 1 при М с =0, нами уже получено ранее (см. рис. 3). Теперь мы изменяем значение М с , которое становится равным М н =КФ I н .
ПРИМЕНЕНИЕ ПРИВОДОВ ПОСТОЯННОГО ТОКА ДЛЯ АВТОМАТИЗАЦИИ СОВРЕМЕННОЙ ПРОМЫШЛЕННОСТИ

Двигатели постоянного тока появились еще в конце 19 столетия и до сих пор используются в разных отраслях промышленности, несмотря на то, что были изобретены двигатели переменного тока, имеющие множество преимуществ.
«Жесткость» механической характеристики и простота управления двигателей постоянного тока.
Количество оборотов двигателя постоянного тока пропорционально величине напряжения, которое подается на якорную обмотку.
В диапазоне скоростей от нуля до номинального значения привод может развивать полный крутящий момент. Обладая такой довольно жесткой механической характеристикой, данные электродвигатели успешно используются в электроприводах лифтов, кранов, ленточных конвейеров, смесителей, экструдеров и многих других механизмов, где необходимо обеспечить большой момент при низких скоростях электродвигателя почти до его остановки при наличии полной нагрузки с последующим стартом.
Два основных рабочих режима двигателей постоянного тока
Двигатели постоянного тока имеют два режима работы:
1) рабочий режим с постоянным моментом, когда скорость двигателя пропорциональна напряжению, подаваемому на якорь, в диапазоне от нуля до номинальной скорости;
2) рабочий режим с постоянной мощностью. Его называют еще в диапазоне ослабления поля, когда скорость электродвигателя является обратно-пропорциональной напряжению возбуждения.
 Первый рабочий режим используется в тех приводах, где существует необходимость работы при полной нагрузке на различных скоростях.
Первый рабочий режим используется в тех приводах, где существует необходимость работы при полной нагрузке на различных скоростях.
Второй режим применяют там, где требуется скорость выше номинальной, но при этом допускается снижение крутящего момента. Наиболее типичное применение – это различные намоточные устройства. Например, привод намоточного валка в бумагоделательной машине, работая в режиме ослабленного поля, при увеличении диаметра рулона будет снижать скорость намотки автоматически, поскольку нагрузка на электродвигатель будет увеличиваться. Таким образом обеспечивается плотность намотки и предотвращается обрыв.
Преимущества «маленьких» двигателей постоянного тока
Обычно, размеры двигателей постоянного тока намного меньше, чем размеры аналогичных асинхронных двигателей. У двигателей постоянного тока значительно меньше высота оси вращения и масса ротора. Следовательно, они имеют более низкий момент инерции ротора и это является их существенным преимуществом при высокодинамичных использованиях, таких как летучие ножницы, испытательные стенды и реверсивные приводы, поскольку требуется меньше времени для торможения и разгона. При использовании электродвигателей постоянного тока уменьшается время цикла работы производственной линии, что способствует увеличению ее производительности.


Большое количество инсталляций
На протяжении довольно длительного периода времени для регулировки скорости вала двигателя использовались только приводы постоянного тока. Следовательно, они имели широкое распространение и были установлены на огромном количестве различных машин, механизмов и оборудовании. Двигатели постоянного тока хорошо известны техникам и инженерам во всем мире и по ним накоплено довольно много информации. Тиристорные регуляторы являются менее сложными, чем преобразователи частоты, а также более ремонтопригодными. Очень часто, при усовершенствовании систем управления, замена устаревших приводов постоянного тока новыми современными приводами постоянного же тока, является экономически более выгодной.
Двигатели постоянного тока до сих пор остаются актуальными в ряде отраслей
Вопреки публикациям в СМИ и доводам производителей приводов переменного тока, существует еще немало таких применений, где приводы постоянного тока являются предпочтительными.

