
Схемы автоматического управления пуском и торможением двигателей постоянного тока
Схемы автоматического управления пуском и торможением двигателей постоянного тока
 Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Процесс торможения двигателей также может быть автоматизирован. После команды на торможение с помощью релейно-контакторной аппаратуры осуществляются необходимые переключения в силовых цепях. При подходе к скорости, близкой к нулю, двигатель отключается от сети. В процессе пуска выключение ступеней происходит через определенные интервалы времени либо в зависимости от других параметров. При этом изменяются ток и скорость двигателя.
Управление пуском двигателя осуществляется в функции ЭДС (или скорости), тока, времени и пути.
Типовые узлы и схемы автоматического управления пуском двигателей постоянного тока
Пуск двигателя постоянного тока параллельного или независимого возбуждения осуществляется с резистором, введенным в цепь якоря. Резистор необходим для ограничения пускового тока. По мере разгона двигателя пусковой резистор по ступеням выводится. Когда пуск закончится, резистор будет полностью зашунтирован, и двигатель перейдет работать на естественную механическую характеристику (рис. 1). При пуске двигатель разгоняется по искусственной характеристике 1, затем 2, а после шунтирования резистора — по естественной характеристике 3.
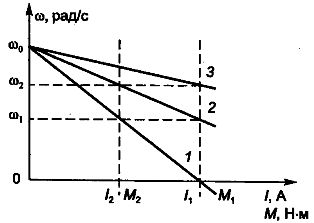
Рис. 1. Механические и электромеханические характеристики двигателя постоянного тока параллельного возбуждения (ω — угловая скорость вращения; I1 М1 — пиковый ток и момент двигателя; I2 М2 — ток и момент переключения)
Рассмотрим узел схемы пуска двигателя постоянного тока (ДПТ) в функции ЭДС (рис. 2).
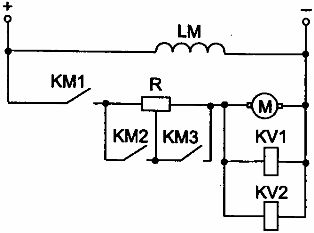
Рис. 2. Узел схемы пуска ДПТ параллельного возбуждения в функции ЭДС
Управление в функции ЭДС (или скорости) осуществляется реле, напряжения и контакторами. Реле напряжения настроены на срабатывание при различных значениях ЭДС якоря. При включении контактора КМ1 напряжение на реле KV в момент пуска недостаточно для срабатывания. По мере разгона двигателя (вследствие роста ЭДС двигателя) срабатывает реле KV1, затем KV2 (напряжения срабатывания реле имеют соответствующие значения); они включают контакторы ускорения КМ2, КМЗ, и резисторы в цепи якоря шунтируются (цепи включения контакторов на схеме не показаны; LM — обмотка возбуждения).
Рассмотрим схему пуска двигателя постоянного тока в функции ЭДС (рис. 3). Угловая скорость двигателя часто фиксируется косвенным путем, т.е. измерением величин, связанных со скоростью. Для двигателя постоянного тока такой величиной является ЭДС. Пуск осуществляется следующим образом. Включается автоматический выключатель QF, обмотка возбуждения двигателя подключается к источнику питания. Срабатывает реле КА и замыкает свой контакт.
Остальные аппараты схемы остаются в исходном положении. Для пуска двигателя необходимо нажать кнопку SB1 «Пуск», после чего контактор КМ1 срабатывает и подключает двигатель к источнику питания. Контактор КМ1 становится на самопитание. Двигатель постоянного тока разгоняется с резистором R цепи якоря двигателя.
По мере увеличения скорости двигателя растет его ЭДС и напряжение на катушках реле KV1 и KV2. При скорости ω1 (см. рис. 1.) срабатывает реле KV1. Оно замыкает свой контакт в цепи контактора КМ2, который срабатывает и закорачивает своим контактом первую ступень пускового резистора. При скорости ω2 срабатывает реле KV2. Своим контактом оно замыкает цепь питания контактора КМЗ, который, срабатывая, контактом закорачивает вторую пусковую ступень пускового резистора. Двигатель выходит на естественную механическую характеристику и заканчивает разбег.
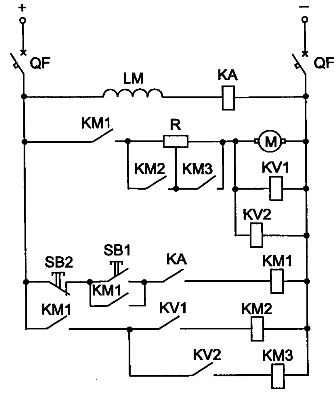
Рис. 3. Схема пуска ДПТ параллельного возбуждения в функции ЭДС
Для правильной работы схемы необходимо настроить реле напряжения KV1 на срабатывание при ЭДС, соответствующей скорости ω1, и реле KV2 на срабатывание при скорости ω2.
Для остановки двигателя следует нажать кнопку SB2 «Стоп». Для обесточивания схемы нужно отключить автоматический выключатель QF.
Управление в функции тока осуществляется с помощью реле тока. Рассмотрим узел схемы пуска двигателя постоянного тока в функции тока. В схеме, приведенной на рис. 4, применяются реле максимального тока, которые срабатывают при пусковом токе I1 и отпадают при минимальном токе I2 (см. рис. 1). Собственное время срабатывания токовых реле должно быть меньше собственного времени срабатывания контактора.
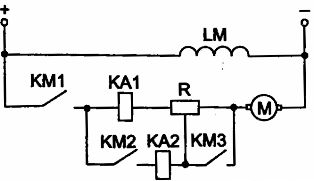
Рис. 4. Узел схемы пуска ДПТ параллельного возбуждения в функции тока
Разгон двигателя начинается при резисторе, полностью введенном в цепь якоря. По мере разгона двигателя ток уменьшается, при токе I2 реле КА1 отпадает и своим контактом замыкает цепь питания контактора КМ2, который своим контактом шунтирует первую пусковую ступень резистора. Аналогично осуществляется закорачивание второй пусковой ступени резистора (реле КА2, контактор КМЗ). Цепи питания контакторов на схеме не показаны. По окончании пуска двигателя резистор в цепи якоря будет зашунтирован.
Рассмотрим схему пуска двигателя постоянного тока в функции тока (рис. 5). Сопротивления ступеней резистора выбираются таким образом, чтобы в момент включения двигателя и шунтирования ступеней ток I1 в цепи якоря и момент М1 не превосходили допустимого уровня.
Пуск двигателя постоянного тока осуществляется включением автоматического выключателя QF и нажатием кнопки SB1 «Пуск». При этом срабатывает контактор КМ1 и замыкает свои контакты. По силовой цепи двигателя проходит пусковой ток I1, под действием которого срабатывает реле максимального тока КА1. Его контакт размыкается, и контактор КМ2 не получает питания.
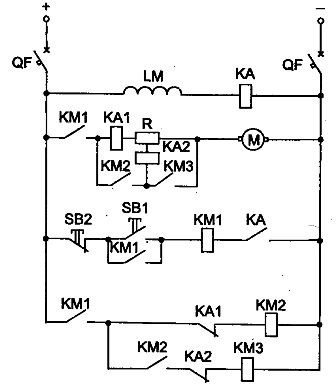
Рис. 5. Схема пуска ДПТ параллельного возбуждения в функции тока
Когда ток уменьшается до минимального значения I2, реле максимального тока КА1 отпадает и замыкает свой контакт. Срабатывает контактор КМ2 и своим главным контактом шунтирует первую секцию пускового резистора и реле КА1. При переключении ток возрастает до значения I1.
При повторном увеличении тока до значения I1 контактор КМ1 не включается, поскольку его катушка зашунтирована контактом КМ2. Под действием тока I1 реле КА2 срабатывает и размыкает свой контакт. Когда в процессе ускорения ток вновь уменьшается до значения I2, реле КА2 отпадает и включается контактор КМЗ. Пуск заканчивается, двигатель работает на естественной механической характеристике.
Для правильной работы схемы необходимо, чтобы время срабатывания реле КА1 и КА2 было меньше времени срабатывания контакторов. Чтобы остановить двигатель, необходимо нажать кнопку SB2 «Стоп» и выключить автоматический выключатель QF для обесточивания схемы.
Управление в функции времени осуществляется с помощью реле времени и соответствующих контакторов, которые своими контактами закорачивают ступени резистора.
Рассмотрим узел схемы пуска двигателя постоянного тока в функции времени (рис. 6). Реле времени КТ срабатывает сразу при появлении напряжения в схеме управления через размыкающий контакт КМ1. После размыкания контакта КМ1 реле времени КТ теряет питание и с выдержкой времени замыкает свой контакт. Контактор КМ2 через промежуток времени, равный выдержке реле времени, получает питание, замыкает свой контакт и шунтирует сопротивление в цепи якоря.
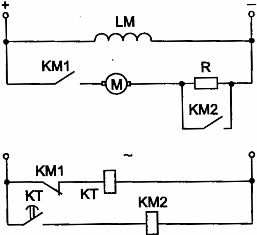
Рис. 6. Узел схемы пуска ДПТ параллельного возбуждения в функции времени
К достоинствам управления в функции времени относятся простота управления, стабильность процесса разгона и торможения, отсутствие задержки электропривода на промежуточных скоростях.
Рассмотрим схему пуска двигателя постоянного тока параллельного возбуждения в функции времени. На рис. 7 приведена схема нереверсивного пуска двигателя постоянного тока параллельного возбуждения. Пуск происходит в две ступени. В схеме используются кнопки SB1 «Пуск» и SB2 «Стоп», контакторы КМ1. КМЗ, электромагнитные реле времени КТ1, КТ2. Включается автоматический выключатель QF. При этом катушка реле времени КТ1 получает питание и размыкает свой контакт в цепи контактора КМ2, Пуск двигателя осуществляется нажатием кнопки SB1 «Пуск». Контактор КМ1 получает питание и своим главным контактом подключает двигатель к источнику питания с резистором в цепи якоря.
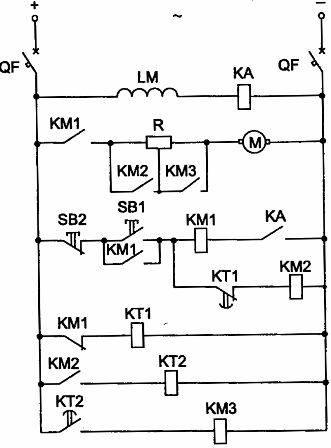
Рис. 7. Схема нереверсивного пуска ДПТ в функции времени
Реле минимального тока КА служит для защиты двигателя от обрыва цепи возбуждения. При нормальной работе реле КА срабатывает и его контакт в цепи контактора КМ1 замыкается, подготавливая контактор КМ1 к работе. При обрыве цепи возбуждения реле КА обесточивается, размыкает свой контакт, затем обесточивается контактор КМ1 и двигатель останавливается. При срабатывании контактора КМ1 замыкается его блокировочный контакт и размыкается контакт КМ1 в цепи реле КТ1, которое обесточивается и замыкает свой контакт с выдержкой времени.
Через промежуток времени, равный выдержке времени реле КТ1, замыкается цепь питания контактора ускорения КМ2, который срабатывает и своим главным контактом закорачивает одну ступень пускового резистора. Одновременно получает питание реле времени КТ2. Двигатель разгоняется. Через промежуток времени, равный выдержке времени реле КТ2, контакт КТ2 замыкается, контактор ускорения КМЗ срабатывает и своим главным контактом закорачивает вторую ступень пускового резистора в цепи якоря. Пуск заканчивается, и двигатель переходит работать на естественную механическую характеристику.
Типовые узлы схем управления торможением двигателей постоянного тока
В системах автоматического управления двигателем постоянного тока применяется динамическое торможение, торможение противовключением и рекуперативное торможение.
При динамическом торможении необходимо обмотку якоря двигателя замкнуть на добавочное сопротивление, а обмотку возбуждения оставить под напряжением. Такое торможение можно осуществить в функции скорости и в функции времени.
Управление в функции скорости (ЭДС) при динамическом торможении можно выполнить по схеме, приведенной на рис. 8. При отключении контактора КМ1 якорь двигателя отключается от сети, но на его зажимах в момент отключения имеется напряжение. Реле напряжения KV срабатывает и замыкает свой контакт в цепи контактора КМ2, который своим контактом замыкает якорь двигателя на резистор R.
При скорости, близкой к нулю, реле KV теряет питание. Дальнейшее торможение от минимальной скорости до полной остановки происходит под действием статического момента сопротивления. Для увеличения эффективности торможения можно применить две или три ступени торможения.
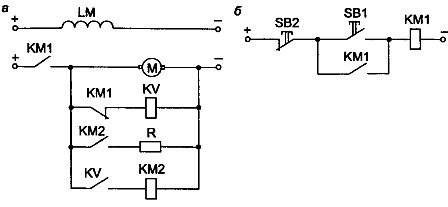
Рис. 8. Узел схемы автоматического управления динамическим торможением в функции ЭДС: а — силовая цепь; б — цепь управления
Динамическое торможение двигателя постоянного тока независимого возбуждения в функции времени осуществляется по схеме, приведенной на рис. 9.
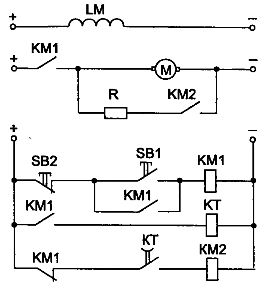
Рис. 9. Узел схемы динамического торможения ДПТ независимого возбуждения в функции времени
При работе двигателя реле времени КТ включено, но цепь контактора торможения КМ2 разомкнута. Для торможения необходимо нажать кнопку SB2 «Стоп». Контактор КМ1 и реле времени КТ теряют питание; срабатывает контактор КМ2, так как контакт КМ1 в цепи контактора КМ2 замыкается, а контакт реле времени КТ размыкается с выдержкой времени.
На время выдержки реле времени контактор КМ2 получает питание, замыкает свой контакт и подключает якорь двигателя к добавочному резистору R. Осуществляется динамическое торможение двигателя. В конце его реле КТ после выдержки времени размыкает свой контакт и отключает контактор КМ2 от сети. Дальнейшее торможение до полной остановки осуществляется под действием момента сопротивления Мс.
При торможении противовключением ЭДС двигателя и напряжение сети действуют согласно. Для ограничения тока в силовую цепь вводится резистор.
Управление возбуждением электродвигателей постоянного тока
Обмотка возбуждения двигателя обладает значительной индуктивностью, и при быстром отключении двигателя на ней может возникнуть большое напряжение, что приведет к пробою изоляции обмотки. Для предотвращения этого можно использовать узлы схем, приведенные на рис. 10. Сопротивление гашения включается параллельно обмотке возбуждения через диод (рис. 10 ,б). Следовательно, после отключения ток через сопротивление проходит кратковременно (рис. 10, а).

Рис. 10. Узлы схем включения сопротивлений гашения: а — сопротивление гашения включается параллельно; б — сопротивление гашения включается через диод.
Защита от обрыва цепи возбуждения осуществляется с помощью реле минимального тока по схеме, показанной на рис. 11.

Рис. 11. Защита от обрыва цепи возбуждения: а — силовая цепь возбуждения; б— цепь управления
При обрыве обмотки возбуждения реле КА теряет питание и отключает цепь контактора КМ.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Схемы управления двигателями постоянного тока
Типовые схемы релейно—контакторного управления (РКУ) двигателями постоянного тока (ДПТ) обеспечивают автоматический пуск, реверсирование и ступенчатое регулирование скорости вращения ДПТ, автоматическое электрическое торможение.
На рис. 17.17 представлена типовая схема РКУ, обеспечивающая пуск ДПТ в функции независимой выдержки времени в три ступени, регулирование скорости ослаблением магнитного потока, динамическое торможение в функции ЭДС, защиту от коротких замыканий, обрыва поля ДПТ, от само-шпуска после исчезновения и появления напряжения. Управляется схема командоконтроллером SA, имеющим секции и четыре положения — нулевое и три рабочих.
Типовые ЭП с силовыми промежуточными магнитными усилителями (ПМУ) используются для САР механизмов подачи металлорежущих станков и иных механизмов, требующих обеспечение диапазона регулирования скорости до 100:1. ПМУ (рис. 17.18, а) включает пары силовых обмоток w, встречно-параллельно включенные в каждую фазу вентили В1, к которым подключается мостовой выпрямитель В2. Обмотка якоря Д подключена к зажимам выпрямителя В2, а обмотка возбуждения питается от отдельного выпрямителя, не показанного в схеме. Фазные силовые обмотки располагаются на отдельных замкнутых сердечниках, охваченных обмотками управления и обратных связей wi и смещения щ.
Регулирование напряжения происходит путем намагничивания сердечников ПМУ, что изменяет индуктивное сопротивление рабочих обмоток. Чем больше намагничивающий ток обмотки управления, тем меньше сопротивление рабочих обмоток и больше выходное напряжение ПМУ, т.е. напряжение на якоре и, следовательно, скорость двигателя.
Принцип действия замкнутой САР сводится к следующему. Задающее напряжение Uj снимается с задающего потенциометра ПЗ, сравнивается с напряжением Uqq тахоге-нератора 77″. Результирующее напряжение подается на вход транзисторного усилителя с диодным ограничителем Д1, Д2. Выходной сигнал усилителя поступает на обмотку управления, ток которой определяет величину выходного постоянного напряжения ПМУ. Обмотка смещения служит для линеаризации начального участка характеристики ПМУ «вход-выход», т.е. зависимости тока рабочей обмотки от тока управления усилителя.
Механические характеристики замкнутой САР с ПМУ представлены на рис. 17.16, 6.
Тиристорные ЭП постоянного тока. Используются для механизмов с широким диапазоном регулирования скорости, необходимостью ограничения моментов и токов двигателя и др. На рис. 17.19 представлена схема комплектного тиристорного ЭП серии ЭТЗР с ДПТ серии ПБСТ либо 4ПО (4ПФ). Замкнутая САР с отрицательной обратной связью по скорости и нелинейной — по току обеспечивает высокую жесткость механических характеристик в диапазоне регулирования 2000:1, ограничение тока якоря и момента на валу ДПТ.
Силовые цепи реверсивного тиристорного преобразователя ТП состоят из двух вентильных групп (Т1,ТЗ, Г5) и <Т2,Т4,Т6>, уравнительных реакторов Др1 и Др2, сглаживающего дросселя ДрЗ.
Задающее напряжение U подается на узел сравнения с диодным ограничителем Д302, куда подается также напряжение обратной связи по скорости U. Результирующее напряжение поступает на вход усилителя БУ, куда подается также пилообразное напряжение блока БУК Их разность определяет угол управления тиристорами, выходное напряжение ТП и, следовательно, скорость вращения ДПТ.
Необходимая жесткость механических характеристик во всем диапазоне обеспечивается жесткой отрицательной обратной связью по скорости, осуществляемой посредством тахогенератора ТП В схеме предусмотрены токовая отсечка (реле РП1 и РП2) и упреждающее токоограничение, что обеспечивает пуск ЭП с неизменным током якоря, равным току упора (1,5—2 I), и максимальную токовую защиту.
ЭП постоянного тона с микропроцессорным управлением
Для перемещения и точного позиционирования рабочих органов робототехнических механизмов используются электроприводы с микропроцессорным управлением (ЭПМПУ). Схема типового ЭПМПУ с аналогово-цифровыми узлами представлена на рис. 17.20.
ДПТ М питается от реверсивного преобразователя на тиристорах VS1—VS6 и VS7—VS12. М связан с рабочим органом, тахогенератором ТГи датчиком положения ДП. Контроль тока якоря осуществляется датчиком тока ДТ.

Рис. 17.19, Схема комплектного тиристорного ЭП серии ЭТЗР

Микропроцессорная система включает микропроцессор МП, устройства памяти ОЗУ и ПЗУ, устройства сопряжения УС1— УСЗ, цифровой датчик положения ДП, цифро-аналоговый преобразователь ЦАП, обеспечивающий выходной сигнал задания скорости. Сигнал задания положения подается с терминала положения Г через УСЗ. Оптимальный график движения ЭП записывается в ПЗУ и определяет работу цифрового регулятора.
Выходное напряжение управления U регулятора поступает на систему импульсно-фазового управления СИФУ, которая определяет напряжение 777 и скорость вращения М.
В качестве МП-системы используются серийные микроЭВМ, либо программируемые контроллеры типа «Электроника К1-20»
После несложной процедуры регистрации Вы сможете пользоваться всеми сервисами и создать свой веб-сайт.
Схема автоматического управления двумя откачивающими насосами
(работающими без дежурного персонала)
 Работа схемы основана на принципе пуска и остановки насосов в зависимости от уровня жидкости в контролируемом резервуаре, из которого производится откачка. Для контроля заполнения бака жидкостью применяется электродный датчик уровня ДУ. Схема разработана для условий пуска и остановки насосных агрегатов при постоянно открытых задвижках на выходном трубопроводе.
Работа схемы основана на принципе пуска и остановки насосов в зависимости от уровня жидкости в контролируемом резервуаре, из которого производится откачка. Для контроля заполнения бака жидкостью применяется электродный датчик уровня ДУ. Схема разработана для условий пуска и остановки насосных агрегатов при постоянно открытых задвижках на выходном трубопроводе.
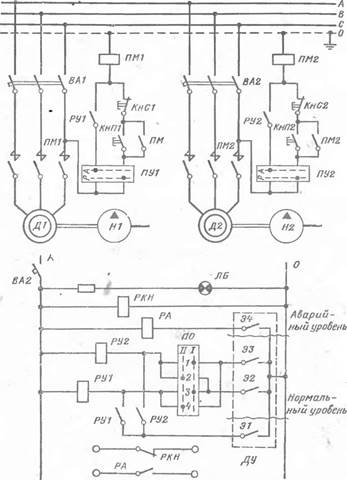
Режим работы агрегатов задается переключателем откачки ПО: в положении I переключателя насос Н1 с двигателем Д1 будет рабочим, а насос Н2 с двигателем Д2 — резервным, который включается, если производительность насоса Н1 окажется недостаточной.
Пусть ПО установлен в положение I, а переключатели ПУ1 и ПУ2— в положение А, т.е. на автоматическое управление насосами. Контакты 1 и 3 переключателя ПО замыкают цепи катушек реле РУ1 и РУ2, но реле не включатся, так как при нормальном уровне жидкости остаются разомкнутыми электроды Э2 и ЭЗ датчика уровня ДУ. При повышении уровня жидкости в емкости до электрода Э2 замыкается цепь катушки реле РУ1, оно срабатывает, и через замыкающий контакт РУ1 подается питание в катушку пускателя ПМ1. Включается двигатель Д1, и насос НI начинает откачку. Уровень жидкости в емкости понижается, но при разрыве контакта Э2 двигатель Д1 не остановится, так как катушка реле РУ1 продолжает получать питание через свой контакт РУ1 и замкнутый контакт электрода Э1. Такая блокировка реле РУ1 применена во избежание частых пусков и остановок насосного агрегата при небольших изменениях уровня жидкости и обеспечивает отключение насоса лишь тогда, когда уровень жидкости спадет ниже нормального и разомкнётся контакт Э1.
Если произойдет аварийное отключение рабочего насоса или производительность его окажется недостаточной, то уровень жидкости в резервуаре будет продолжать повышаться. Когда он достигнет электрода ЭЗ датчика ДУ, получит питание катушка реле РУ2. Реле сработает и включит магнитный пускатель ПМ2, включится двигатель Д2 резервного насоса.
При большом притоке жидкости в резервуар производительность обоих насосных агрегатов может оказаться недостаточной, и жидкость поднимется до предельно допустимого уровня, на котором установлен электрод Э4. При этом замкнется цепь катушки реле РА, которое сработает и своим замыкающим контактом включит цепь аварийной сигнализации, оповещая персонал о ненормальной работе насосных агрегатов. Для подачи предупредительного сигнала при исчезновении напряжения в цепях управления служит реле контроля напряжения РКН. Цепи аварийной сигнализации питаются от самостоятельного источника. Белая сигнальная лампа ЛБ служит для оповещения о наличии напряжения в цепях управления при контрольных осмотрах аппаратуры.
Переход на ручное (местное) управление насосными агрегатами производится поворотом переключателей ПУ1 и ПУ2 в положение Р. Включение и отключение двигателей Д1 или Д2 производится нажатием кнопок КнП1 и КнС1 или КнП2 и КнС2, расположенных непосредственно у насосных агрегатов.
Схема может быть применена для управления двигателями мощностью до 10 кВт, так как цепи катушек магнитных пускателей защищаются теми же автоматическими* выключателями ВА1 и ВА2, что и двигатели. При двигателях большей мощности для цепей катушек ПМ1 и ПМ2 следует применять самостоятельную защиту. Данная схема с незначительными изменениями используется и для управления работой насосов перекачки охлаждающей эмульсии для металлорежущих станков.
2.2. Типовые узлы схем автоматического управления двигателями постоянного тока
Рассмотрим ряд типовых узлов схем управления электроприводами, реализующими вышеописанные принципы управления. На рис. 2.2, а приведен узел электрической схемы, обеспечивающий автоматический пуск в функции времени двигателя М с двумя ступенями добавочного пускового сопротивления (вид возбуждения двигателя может быть любым, на рисунке показано независимое возбуждение).
Алгоритм работы приведенного узла схемы следующий. Сразу же после подачи напряжения на главные цепи и цепи управления включается реле времени первой ступени РУ1 и открывает свой размыкающий контакт, не давая возможности преждевременно включиться контакторам ускорения КУ 1 и КУ 2.
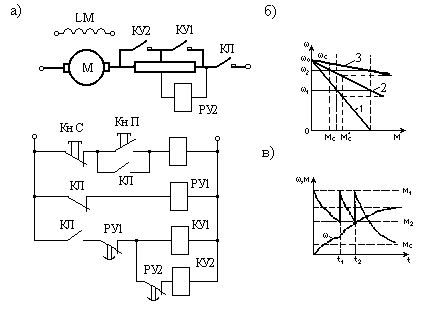
Рис. 2.2. Схема реостатного пуска двигателя постоянного тока в функции времени
Нажатие на кнопку КнП («Пуск») приводит к включению линейного контактора КЛ, который замыкает свой главный контакт в цепи якоря двигателя, замыкающим блок-контактом шунтирует кнопку КнП (тем самым контактор КЛ становится на самопитание), а размыкающим блок-контактом разрывает цепь катушки реле РУ1. Двигатель начинает разгоняться по реостатной механической характеристике первой ступени пуска (рис. 2.2, б). При протекании по добавочному сопротивлению пускового тока мгновенно срабатывает реле времени второй ступени РУ2, так как к его катушке прикладывается достаточное по величине напряжение, равное падению напряжения на сопротивлении Rдоб.п.1. Размыкающий контакт реле РУ2 открывается в цепи катушки контактора КУ2.
Реле РУ1, начавшее отсчет выдержки времени, соответствующей времени t1 разгона двигателя на первой ступени пуска, по истечении ее замыкает свой контакт. Включается контактор КУ1, который своим силовым контактом закорачивает сопротивление Rдоб.п.1 и вместе с ним катушку реле РУ2. Начинается разгон двигателя согласно реостатной характеристике 2 второй ступени пуска. Реле РУ2 отсчитывает выдержку времени, соответствующую времени (t2 – t1) двигателя на второй ступени, и затем замыкает свой контакт. Включается контактор КУ2 и закорачивает сопротивление Rдоб.п.2. Двигатель выходит на естественную характеристику 3 и разгоняется до установившейся скорости ωс, соответствующей моменту Мс. На этом пуск заканчивается.
На рис. 2.2, в показаны зависимости момента и скорости двигателя от времени, которые дополнительно иллюстрируют работу описанного узла схемы управления. Уставка реле времени РУ1 определится как разность между временем t1 и собственным временем включения контактора КУ1:  . Аналогично определится и уставка реле времениРУ2:
. Аналогично определится и уставка реле времениРУ2:  . При этомt1 = Δt1 и t2 – t1 = Δt2 — расчетные значения времени разгона двигателя на первой и второй ступенях (см. формулу (2.1)).
. При этомt1 = Δt1 и t2 – t1 = Δt2 — расчетные значения времени разгона двигателя на первой и второй ступенях (см. формулу (2.1)).
Достоинством принципа управления в функции времени — это простота и надежность реле времени, удобство регулировки их уставок, возможность применения однотипных реле для двигателей различной мощности. Кроме того, при изменениях статического момента, момента инерции привода, напряжения сети и т.д. время пуска практически не изменяется. Например, при увеличении Мс до значения М’с (рис. 2.2, б) при сохранении той же выдержки времени реле РУ1 двигатель на первой ступени разгонится до меньшей скорости, но бросок момента при переключении будет большим. В результате процесс разгона пойдет в соответствии с графиком, показанным на рис. 2.2, б штрихпунктирными линиями, таким образом, что средний динамический момент при пуске останется приблизительно тем же. Поэтому почти не изменится и общее время пуска. Если же бросок момента (тока якоря) превысит допустимое значение, то двигатель отключится максимально-токовой защитой. При управлении в функции времени (в отличие от управления в функции скорости или тока) полностью устраняется опасность «застревания» двигателя на первой ступени пуска при М’с > М2. Все это и обусловило широкое распространение управления пуском в функции времени.
На рис. 2.3, а приведен узел схемы автоматического управления пуском двигателя постоянного тока в функции скорости. Контроль скорости в приведенном узле схемы осуществляется косвенным образом. С этой целью в узле схемы, показанном на рис. 2.3, а, катушки контакторов ускорения КУ1 и КУ2 непосредственно подключены на зажимы якоря двигателя независимого возбуждения, т.е. на напряжение ия, отличающееся от ЭДС якоря ея только на величину падения напряжения в сопротивлении якоря Rя. Поскольку ЭДС якоря двигателя при постоянном магнитном потоке, в данном случае номинальном потоке Фном, пропорциональна скорости двигателя ( ), то рассматриваемый узел схемы осуществляет управление пуском в функции скорости с ее косвенным контролем, т.е. в функции ЭДС.
), то рассматриваемый узел схемы осуществляет управление пуском в функции скорости с ее косвенным контролем, т.е. в функции ЭДС.
При определенных значениях напряжения на якоре uя1 и uя2 контакторы КУ1 и КУ2 включаются, закорачивая ступени пускового реостата.
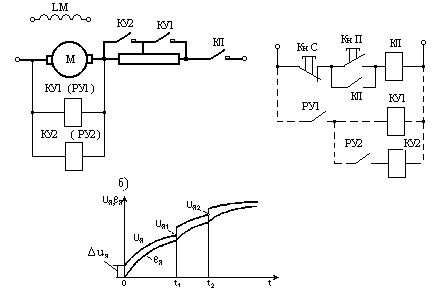
Рис. 2.3. Схема реостатного пуска двигателя постоянного тока в функции скорости
Алгоритм работы приведенного узла схемы следующий. Пуск двигателя начинается после нажатия на кнопку КнП и включения линейного контактора КЛ. В самом начале пуска напряжение на катушках контакторов КУ1 и КУ2 мало и равно падению напряжения Δuя на якоре от начального броска пускового тока. Поэтому контакторы не могут сработать, и в цепь якоря введено сопротивление обеих ступеней Rдоб.п.1 и Rдоб.п.2. По мере увеличения скорости двигателя его ЭДС возрастает. При токе якоря I2 и скорости ω1 напряжение на катушке контактора КУ1 становится равным напряжению срабатывания контактора КУ1
 (рис. 2.3,б)
(рис. 2.3,б)
Контактор КУ1 включается и закорачивает первую ступень сопротивления Rдоб.п.1. В конце разгона на второй ступени пуска, когда напряжение на якоре достигнет значения  , включается контакторКУ2, и закорачивает вторую ступень сопротивления Rдоб.п.2, и двигатель выходит на естественную характеристику.
, включается контакторКУ2, и закорачивает вторую ступень сопротивления Rдоб.п.2, и двигатель выходит на естественную характеристику.
Очевидно, что значения напряжений срабатывания контакторов КУ1 иКУ2(uсраб.КУ1 и uсраб.КУ2) существенно отличаются друг от друга. Сами возможности регулировки напряжения срабатывания у контакторов весьма ограниченны. Поэтому практически всегда для контроляЭДСприменяют реле напряжения(РУ1 и РУ2), которые затем включают контакторыКУ1 иКУ2 (это показано на рис. 2.3, а штрих пунктирными линиями). Но тогда теряется основное положительное качество схемы — ее простота.
Как указывалось ранее, управление в функции тока применяется при разгоне двигателя независимого возбуждения путем ослабления магнитного потока. На рис. 2.4, а приведен узел схемы, реализующий этот принцип управления (на рисунке для упрощения не показаны цепи катушек контакторов КЛ, КУ1 и КУ2). Контроль тока якоря Iя осуществляется токовым реле РУП. Алгоритм работы данного узла с момента включения контактора КУ2, (т.е. с момента выхода двигателя на естественную характеристику) следующий. При замыкании главного контакта КУ2 от броска тока якоря срабатывает реле РУП и замыкает свой контакт, шунтирующий реостат возбуждения Rдоб.в (до этого реостат был закорочен размыкающим контактом КУ2). Следовательно, магнитный поток двигателя Ф сохраняется равным номинальному потоку Фном и двигатель продолжает разгон по естественной характеристике. Когдатокякоря снизится до значения тока отпускания Iотп.РУП реле РУП, последнее размыкает свой контакт, и в цепь обмотки возбуждения вводится сопротивление R доб.в . Происходит процесс ослабления магнитного потока Ф и рост скорости двигателя ω (рис. 2.4, б). При этом ток якоря увеличивается и, когда он достигнет значения тока срабатывания Iсраб.РУП реле РУП, контакт реле закроется. Начнется усиление магнитного потока и снижение тока якоря. Скорость двигателя будет продолжать расти, так как за счет увеличенного тока якоря момент двигателя превышает статический момент. При спадании тока якоря до величины Iотп.РУП вновь реле РУП откроет свой контакт, что повлечет за собой ослабление потока и т.д. Реле РУП срабатывает несколько раз, прежде чем двигатель достигнет скорости, заданной положением ползунка реостата R доб.в .

Таким образом, если пренебречь инерционностью реле РУП, можно считать, что в описанном процессе ослабления потока ток якоря двигателя колеблется в пределах от Iотп.РУП до Iсраб.РУП . Колебания тока тем меньше, чем выше коэффициент возврата реле РУП. Подобный процесс и способ управления называют вибрационным. Данный способ особенно удобен для управления разгоном двигателей с широким диапазоном регулирования скорости при Ф 10 / 45 10 11 12 13 14 15 16 17 18 > Следующая > >>

