Электрическая схема двигателя смешанного возбуждения
Электрическая схема двигателя смешанного возбуждения
Электродвигателю постоянного тока со смешанным возбуждением (компаундному электродвигателю) до некоторой степени присущи свойства рассмотренных выше электродвигателей с параллельным и последовательным возбуждением. Данный электродвигатель снабжается двумя обмотками возбуждения: последовательной и параллельной.

Принципиальная схема такого электродвигателя приведена на рис. 31, где последовательная обмотка обозначена СОВ, а параллель ная— ШОВ. Обычно на клеммных коробках электродвигателей обозначают: выводы от последовательной обмотки С 1 и С 2 , выводы от параллельной обмотки — Ш 1 и Ш 2 , а выводы от обмотки якоря — Я 1 и Я 2 . На схемах же указанные обмотки могут обозначаться по-разному: СОВ и ШОВ, С 1 — С 2 и Ш 1 —Ш 2 .
Последовательная и параллельная обмотки возбуждения могут включаться двояким образом. В одних случаях они включаются так, чтобы создаваемые ими ампер-витки, а следовательно, и магнитные потоки складывались. Такое включение обмоток принято называть согласным. Очевидно, что при согласном включении результирующий магнитный поток электродвигателя

В других случаях обмотки возбуждения включаются в цепь таким образом, чтобы создаваемые ими ампер-витки (и магнитные потоки) были направлены навстречу друг другу. Такое включение обмоток называют встречным. При встречном включении результирующий магнитный поток электродвигателя

Встречное включение обмоток возбуждения применяется лишь в машинах специального назначения. В обычных же крановых электродвигателях со смешанным возбуждением обмотки всегда включены согласно, поэтому при дальнейшем изложении материала будем предполагать, что ампер-витки обеих обмоток (и магнитные потоки) складываются, т. е. обмотки включены согласно и для электродвигателя справедливо равенство (69).

Наличие двух обмоток возбуждения позволяет конструировать и изготавливать электродвигатели с различными свойствами и характеристиками. При естественной схеме включения характеристики рассматриваемого электродвигателя жестче, чем у электродвигателей с последовательным возбуждением, и мягче, чем у электродвигателей с параллельным возбуждением. Однако в зависимости от соотношения ампер-витков, создаваемых параллельной и последовательной обмотками, характеристики электродвигателя по своему характеру приближаются либо к характеристикам электродвигателя с последовательным возбуждением, либо с параллельным.
Для подъемно-транспортных машин выпускаются электродвигатели, в которых при полной нагрузке половина ампер-витков возбуждения создается параллельной обмоткой, а половина — последовательной.
В случае изменения нагрузки магнитный поток электродвигателя со смешанным возбуждением не остается постоянным, так как ампер-витки, создаваемые последовательной обмоткой, определяются током якоря. Зависимость результирующего магнитного потока от тока якоря приведена на рис. 32, а, который показывает, что каждому значению тока якоря соответствует определенный магнитный поток и, следовательно, вращающий момент М = кФI я при изменении нагрузки меняется не только за счет изменения тока якоря, но и за счет магнитного потока возбуждения. Зависимость М = f (I я ) для электродвигателя со смешанным возбуждением показана на рис. 32, б.
ДПТ последовательного возбуждения

В этом двигателе обмотка возбуждения включена последовательно в цепь якоря (рис. 29.9, а), поэтому магнитный поток Ф в нем зависит от тока нагрузки I = Ia = Iв. При небольших нагрузках магнитная система машины не насыщена и зависимость магнитного потока от тока нагрузки прямо пропорциональна, т. е. Ф = kф Ia (kф — коэффициент пропорциональности). В этом случае найдем электромагнитный момент:


Формула частоты вращения примет вид
На рис. 29.9, б представлены рабочие характеристики M = F(I) и n= (I) двигателя последовательного возбуждения. При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.

Рис. 29.9. Двигатель последовательного возбуждения:
а — принципиальная схема; б — рабочие характеристики; в — механические характеристики; 1 — естественная характеристика; 2 — искусственная характеристика
При уменьшении нагрузки двигателя последовательного возбуждения частота вращения резко увеличивается и при нагрузке меньше 25% от номинальной может достигнуть опасных для двигателя значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Для более надежной работы вал двигателя последовательного возбуждения должен быть жестко соединен с рабочим механизмом посредством муфты и зубчатой передачи. Применение ременной передачи недопустимо, так как при обрыве или сбросе ремня может произойти «разнос» двигателя. Учитывая возможность работы двигателя на повышенных частотах вращения, двигатели последовательного возбуждения, согласно ГОСТу, подвергают испытанию в течение 2 мин на превышение частоты вращения на 20% сверх максимальной, указанной на заводском щите, но не меньше чем на 50% сверх номинальной.
Механические характеристики двигателя последовательного возбуждения n=f(M) представлены на рис. 29.9, в. Резко падающие кривые механических характеристик (естественная 1 и искусственная 2) обеспечивают двигателю последовательного возбуждения устойчивую работу при любой механической нагрузке. Свойство этих двигателей развивать большой вращающий момент, пропорциональный квадрату тока нагрузки, имеет важное значение, особенно в тяжелых условиях пуска и при перегрузках, так как с постепенным увеличением нагрузки двигателя мощность на его входе растет медленнее, чем вращающий момент. Эта особенность двигателей последовательного возбуждения является одной из причин их широкого применения в качестве тяговых двигателей на транспорте, а также в качестве крановых двигателей в подъемных установках, т. е. во всех случаях электропривода с тяжелыми условиями пуска и сочетания значительных нагрузок на вал двигателя с малой частотой вращения.
Номинальное изменение частоты вращения двигателя последовательного возбуждения
где n[0,25] — частота вращения при нагрузке двигателя, составляющей 25% от номинальной.
Частоту вращения двигателей последовательного возбуждения можно регулировать изменением либо напряжения U, либо магнитного потока обмотки возбуждения. В первом случае в цепь якоря последовательно включают регулировочный реостат Rрг (рис. 29.10, а). С увеличением сопротивления этого реостата уменьшаются напряжение на входе двигателя и частота его вращения. Этот метод регулирования применяют главным образом в двигателях небольшой мощности. В случае значительной мощности двигателя этот способ неэкономичен из-за больших потерь энергии в Rрг . Кроме того, реостат Rрг , рассчитываемый на рабочий ток двигателя, получается громоздким и дорогостоящим.
При совместной работе нескольких однотипных двигателей частоту вращения регулируют изменением схемы их включения относительно друг друга (рис. 29.10, б). Так, при параллельном включении двигателей каждый из них оказывается под полным напряжением сети, а при последовательном включении двух двигателей на каждый двигатель приходится половина напряжения сети. При одновременной работе большего числа двигателей возможно большее количество вариантов включения. Этот способ регулирования частоты вращения применяют в электровозах, где установлено несколько одинаковых тяговых двигателей.
Изменение подводимого к двигателю напряжения возможно при питании двигателя от источника постоянного тока с регулируемым напряжением (например, по схеме, аналогичной рис. 29.6, а). При уменьшении подводимого к двигателю напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны (рис. 29.11).

Рис. 29.11. Механические характеристики двигателя последовательного возбуждения при изменении подводимого напряжения
Регулировать частоту вращения двигателя изменением магнитного потока можно тремя способами: шунтированием обмотки возбуждения реостатом rрг, секционированием обмотки возбуждения и шунтированием обмотки якоря реостатом rш. Включение реостата rрг, шунтирующего обмотку возбуждения (рис. 29.10, в), а также уменьшение сопротивления этого реостата ведет к снижению тока возбуждения Iв = Ia — Iрг, а следовательно, к росту частоты вращения. Этот способ экономичнее предыдущего (см. рис. 29.10, а), применяется чаще и оценивается коэффициентом регулирования
Обычно сопротивление реостата rрг принимается таким, чтобы kрг >= 50%.
При секционировании обмотки возбуждения (рис. 29.10, г) отключение части витков обмотки сопровождается ростом частоты вращения. При шунтировании обмотки якоря реостатом rш (см. рис. 29.10, в) увеличивается ток возбуждения Iв = Ia+Iрг, что вызывает уменьшение частоты вращения. Этот способ регулирования, хотя и обеспечивает глубокую регулировку, неэкономичен и применяется очень редко.

Рис. 29.10. Регулирование частоты вращения двигателей последовательного возбуждения.
Моделирование и исследование двигателя постоянного тока параллельного возбуждения с последовательной стабилизирующей обмоткой

Лабораторная работа «Исследование двигателя постоянного тока параллельного возбуждения с последовательной стабилизирующей обмоткой возбуждения».
Лабораторная работа создана для студентов, изучающих дисциплины «Электрические машины», «Переходные процессы в электрических машинах». Модель реализована в MATLAB&Simulink на основе дифференциальных уравнений машины постоянного тока. Модель двигателя постоянного тока в отличие от стандартных встроенных моделей реализована с учётом нелинейности кривой намагничивания и нелинейной реакции якоря. Студент имеет возможность регулировать напряжение, нагрузку и сопротивления в цепях якоря и возбуждения.
Целью работы является изучение рабочих свойств и переходных процессов электродвигателя постоянного тока параллельного возбуждения с последовательной стабилизирующей обмоткой возбуждения в цепи обмотки якоря.
Описание интерфейса
Интерфейс лабораторной работы представлен на рисунке 1. В лабораторной работе предусмотрены регуляторы напряжения и момента сопротивления, показатели токов, напряжения, момента сопротивления и частоты вращения ротора, а также регуляторы сопротивлений в цепях возбуждения (Rв) и якоря (Rпр).

Рисунок 1. Интерфейс лабораторной работы.
Принципиальная схема стенда для исследования ДПТ параллельного возбуждения показана на рис. 2.

Рисунок 2. Электрическая схема стенда для исследования характеристик двигателя постоянного тока параллельного возбуждения.
Электродвигатель имеет цепь якоря, в которой последовательно включены обмотка якоря (ОЯ), обмотка добавочных полюсов (ОДП) и пускорегулирующий реостат RПР. Параллельно цепи якоря включена цепь возбуждения, в которой последовательно соединены обмотка параллельного возбуждения (ОШ — обмотка шунтовая) и реостат RB для регулирования тока возбуждения. В цепь якоря и цепь возбуждения включены амперметры, параллельно цепи якоря — вольтметр. Нагрузкой двигателя имитирует действие электромагнитного тормоза (ЭМТ).
Математическая модель двигателя постоянного тока параллельного возбуждения
Переходный электромеханический процесс в ДПТ параллельного возбуждения с последовательной стабилизирующей обмоткой в цепи якоря (рис. 3) при пренебрежении действием вихревых токов в элементах магнитопровода описывается системой из трёх дифференциальных уравнений (ДУ) первого порядка, включающих два уравнения равновесия напряжений для цепей якоря и возбуждения и уравнение движения якоря (уравнение моментов):

где U = Uн — номинальное напряжение сети, В; t — время, с; Ф = (Фм ‒ Фр.я) — результирующий магнитный поток, Вб; Фм = (Фв + Фс) — поток намагничивания, обусловленный магнитными потоками обмоток: возбуждения (ОВ) Фв и стабилизирующей (ОС) Фс, Вб; Фр.я — магнитный поток реакции якоря, Вб; iя = (U ‒ E ‒ Lяdiя/dt ‒ 2pσwcdФ/dt) /rя и iв = (Fμ/wв ‒ iяwc/wв) – токи в цепях якоря и возбуждения, A; Fμ = (Fв + Fc) — намагничивающая магнитодвижущая сила (МДС), созданная МДС обмоток: ОВ Fв = iвwв и ОС Fc = iяwc, A; wc и wв — числа витков обмоток ОС и ОВ соответственно; Е = СеnФ — ЭДС обмотки якоря (ОЯ), В; Мэ = СМФiя — электромагнитный момент двигателя, Н·м; Мс — момент сопротивления (нагрузки), Н·м; СМ и Сe — конструктивные постоянные двигателя; (Rя + rп) = rя — суммарное сопротивление в цепи якоря, включающее сопротивления обмоток ОЯ и ОС Rя и пусковое сопротивление rп, Ом; (Rв + Rд) = rв — суммарное сопротивление в цепи возбуждения, включающее сопротивление обмотки ОВ Rв и добавочное сопротивление rд, Ом; n = (U ‒ iяrя ‒ Lяdiя /dt ‒ 2pσwcdФ/dt) /(CeФ) = 30ω/π — частота вращения ротора, об/мин; ω = 2πn/60 = n/9,55 — угловая частота, 1/с; Lя — индуктивность в цепи якоря, Гн; J — суммарный момент инерции якоря и нагрузки, кг·м2; 2р — количество полюсов; σ — коэффициент рассеяния главных полюсов.

Рисунок 3. Электрическая схема двигателя постоянного тока.
Зависимость потока намагничивания Фμ = f(Fμ) является нелинейной функцией одной переменной МДС Fμ, а зависимость потока реакции якоря Фр.я = f(iя,iв) — нелинейная функция двух переменных ‑ токов iя и iв.
Индуктивность Lя зависит от насыщения магнитной цепи машины и в общем случае является переменной величиной, учёт зависимости которой значительно усложняет решение системы дифференциальных уравнений ДУ (1). В работе принимается, что индуктивность Lя равна среднему значению индуктивности за время переходного процесса. В этом случае система ДУ (1), записанная в нормальной форме Коши, имеет вид:

При исследовании переходных процессов используются относительные единицы (о.е.), позволяющие выводить на экран дисплея одновременно нескольких сопоставимых результатов решения ДУ и проводить их сравнительный анализ. Кроме этого количественная оценка результатов, полученных на двигателе одной мощности, может быть распространена на двигатели других мощностей аналогичной серии. В качестве базисных величин в данном случае целесообразно использовать номинальные значения: токов якоря iя.н и возбуждения iв.н, А; результирующего потока Фн, Вб; частоты вращения якоря n, об/мин; результирующей МДС Fн = iв.нwв, А, момента Мн, Н·м. Тогда в о.е. все величины ДУ будут безразмерны и равны:
i*я = iя /iя.н;
i*в = iв /iв.н;
Ф* = Ф/Фн;
Ф*μ = Фμ/Фн;
Ф*р.я = Фр.я/Фн;
n* = n/nн;
F* = F/Fн;
F*μ = Fμ/Fн;
М*э = Мэ/Мн;
М*с = Мс/Мн.
Система ДУ (2) в о.е., приведенная к виду, удобному для моделирования, запишется следующим образом:

где коэффициенты при переменных соответственно равны:
a3 = rя/Lя = (Rя + rп)/Lя;
a6 = rвiв.н/(2pσwвФн) = (Rв + rд) iв.н /(2pσwвФн);
а7 = 9,55СмФнiя.н /(Jnн) = 9,55Мн /(Jnн);
а9 = iя.нwc /(iв.нwв);
Ф* = (Ф*μ ‒ Ф*р.я) — результирующий поток;
F*μ = f(Ф*μ) — нелинейная зависимость МДС намагничивания от потока;
Ф*р.я = f(i*я, i*в) — нелинейная зависимость потока реакции якоря;
i*в = (F*μ ‒ a9i*я) — ток возбуждения;
М*э = Ф*i*я — электромагнитный момент;
Мс — момент сопротивления;
U — приложенное к двигателю напряжение.
Методические указания
1. Моделирование переходного электромеханического процесса в исследуемом ДПТ требует задания нелинейной зависимости МДС намагничивания Fμ от потока намагничивания Ф*μ в табличном виде, которая в о.е. измерения F*μ = f(Ф*μ) приведена в табл. 1.

2. Зависимость Фр.я = f(iя, iв) — нелинейная функция от токов iя и rв, реализация которой на ПК вызывает значительные трудности. Поэтому в работе использован переход от функции двух переменных Фр.я = f(iя, iв) к функции одной переменной Фр.я = f(iя), построенной для среднего значения тока iв в области iвmin
Электрическая схема двигателя последовательного возбуждения с ее описанием и кривая намагничивания тягового двигателя
Характерной особенностью двигателя последовательного возбуждения (ДПТ с ПВ) является то, что его обмотка возбуждения (ПОВ) с сопротивлением посредством щеточно-коллекторного узла последовательно соединена с обмоткой якоря с сопротивлением , т.е. в таких двигателях возможно только электромагнитное возбуждение.
Принципиальная электрическая схема включения двигателя последовательного возбуждения представлена на рисунке 2
Рисунок 2 Электрическая схема двигателя последовательного возбуждения
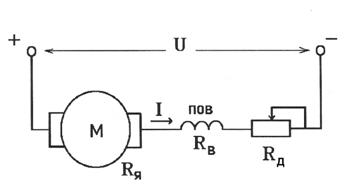
Для осуществления пуска ДПТ с ПВ последовательно с его обмотками включается добавочный реостат 
Уравнения электромеханической характеристики ДПТ с ПВ
Ввиду того, что в ДПТ с ПВ ток обмотки возбуждения равен току в обмотке якоря, в таких двигателях в отличие от ДПТ с НВ проявляются интересные особенности.
Поток возбуждения  ДПТ с ПВ связан с током якоря (он же является и током возбуждения)
ДПТ с ПВ связан с током якоря (он же является и током возбуждения)  зависимостью, называемой кривой намагничивания, представленной на рисунок 3.
зависимостью, называемой кривой намагничивания, представленной на рисунок 3.
Рисунок 3 Кривая намагничивания ДПТ с ПВ
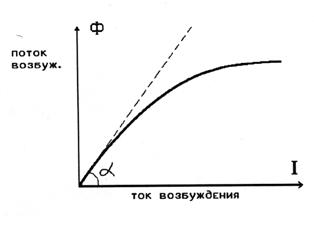
Как видно зависимость  для малых токов близка к линейной, а с увеличением тока проявляется нелинейность, связанная с насыщением магнитной системы ДПТ с ПВ. Уравнение электромеханической характеристики ДПТ с ПВ так же и для ДПТ с независимым возбуждением имеет вид
для малых токов близка к линейной, а с увеличением тока проявляется нелинейность, связанная с насыщением магнитной системы ДПТ с ПВ. Уравнение электромеханической характеристики ДПТ с ПВ так же и для ДПТ с независимым возбуждением имеет вид
Из-за отсутствия точного математического описания кривой намагничивания, при упрощенном анализе можно пренебречь насыщением магнитной системы ДПТ с ПВ, т. е. принять зависимость между потоком и током якоря линейной, как это показано на рис. 3 пунктирной линией. В этом случае можно записать

где  коэффициент пропорциональности.
коэффициент пропорциональности.
Актуально о транспорте
Технологический процесс предоставления услуги с учетом требуемого качества и индивидуальных запросов клиентов
Главной составляющей любой технологии шумоизоляции автомобиля является использование специальных вибро- и звукопоглощающих материалов и защитных кожухов. Все материалы можно разделить на две основные группы: • звукоизоляторы, которые обладают слабой звукопроводностью и низкой теплопроводностью, и з .
Плановые вагонопотоки
Исходный экономический материал для составления плана формирования поездов — план перевозок. На его основе разрабатывают плановые вагонопотоки (назначения и число вагонов, отправляемых каждой станцией)—таблицы корреспонденции вагонов между станциями и узлами. В таблицы помещают данные о среднесуточ .
Бульдозеры
Бульдозер принадлежит к ряду спецтехники. Чаще всего он представляет собой колесный либо гусеничный трактор, оснащенный специальным рабочим органом. В его роли обычно выступает отвал. Отвал располагается вне колес бульдозера. Он может быть не только прямолинейным, но и криволинейным. Основной задач .