
Электрический двигатель простейшая схема
Электрический двигатель простейшая схема
Защита трехфазного электродвигателя.
Обычная схема подключения трёхфазного асинхронного электродвигателя состоит из следующих элементов:
• тепловое реле токовой защиты.
Автоматические выключатели (автоматы) применяемые для защиты двигателей имеют расцепители тепловые и максимального тока, по принципу работы соответствующие максимальным и тепловым реле.
Следует учесть, что не все автоматы имеют такие расцепители и поэтому не все они могут применяться для защиты двигателя от перегрузки.
В схеме защиты автоматы устанавливаются перед пускателем для защиты проводов и аппаратов от тока короткого замыкания, а двигателя от тока короткого замыкания и перегрузки.
Тепловое реле реагирует на превышения тока потребляемого электродвигателем и вызывает размыкание контактов реле, что приводит к обесточиванию катушки и отключению электродвигателя.
Типовые схемы включения трёхфазного электродвигателя
Схемы подключения электродвигателей отличаются магнитными пускателями, в которых используются катушки на разные напряжения.
В первом случае используется магнитный пускатель с рабочим напряжением катушки – 220V; для питания используется любая фаза и ноль — N.
Во втором случае электродвигатель подключается через магнитный пускатель с катушкой на 380V, для питания используются две фазы, например B и С.
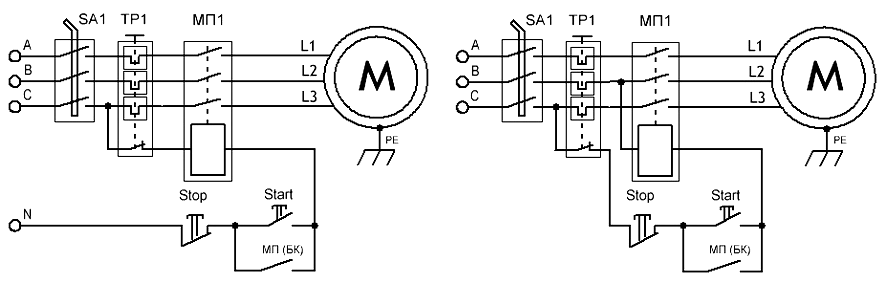
Обозначения на схеме:
SA1 — выключатель автоматический (3х-полюсный автомат),
TP1 — тепловое реле,
МП1 — магнитный пускатель,
БК — блок-контакт (нормально разомкнутый),
Start — кнопка «Пуск»,
Stop — кнопка «Стоп».
Наиболее частые причины повреждения электродвигателя вследствие тепловой перегрузки является пропадание одной из питающих фаз, что приводит к ненормальному режиму работы и вызывает увеличение тока в статорных обмотках, в результате чего происходит перегрев и разрушение изоляции обмоток статора, приводящий к замыканию обмоток и полной неработоспособности электродвигателя.
От небольших и устойчивых перегрузок двигатели защищают автоматами и тепловыми реле, но вследствие своей тепловой инерции они не сразу реагирует на резкие перегрузки, а только через несколько минут и за это время статорная обмотка может уже недопустимо перегреться.
Поэтому в случае, когда возможны ситуации с непреднамеренным отключением одной из фаз питающей сети, и необходимо предотвратить выход из строя электродвигателя, целесообразно заменить стандартную схему подключения электродвигателя на одну из нижеследующих.
В обычную схему запуска трехфазного электродвигателя помимо автомата и теплового (токового) реле, вводится еще одно дополнительное реле Р с нормально разомкнутыми контактами P1. При наличии напряжения в трехфазной сети обмотка дополнительного реле Р постоянно находится под напряжением и контакты Р1 замкнуты. При нажатии кнопки «Start» через обмотку магнитного пускателя МП проходит ток и он своими контактами блокирует кнопку «Start» и подключает электродвигатель к сети.
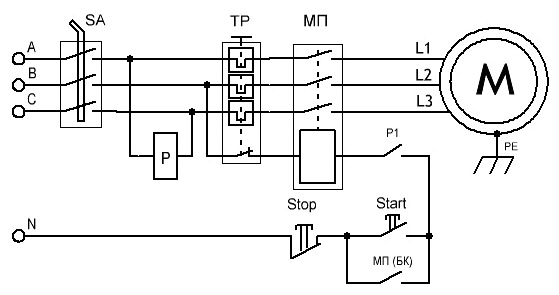
При пропадании в сети фазы A или C реле Р будет обесточено, контакты Р1 разомкнутся, отключив от сети обмотку магнитного пускателя, который соответственно отключит от сети электродвигатель.
При пропадании в сети фазы В обесточивается непосредственно обмотка магнитного пускателя.
Схема аналогична схеме рассмотренной в первом способе, но имеет отличие в том, что дополнительное реле Р при выключенном двигателе обесточено.
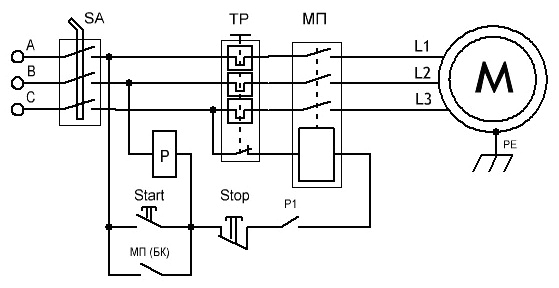
При нажатии кнопки «Start» включается реле Р1 и контактами Р1 замыкает цепь питания катушки магнитного пускателя МП, который срабатывает и своими контактами блокирует цепь управления и включает электродвигатель. При обрыве линейного провода B отключается реле Р, а при обрыве проводов А или С магнитный пускатель МП, в обоих случаях электродвигатель отключается от сети контактами магнитного пускателя МП.
Следующее устройство работает на принципе создания искусственной нулевой точки образованной тремя одинаковыми конденсаторами С1—С3. Между этой точкой и нулевым проводом N включено дополнительное реле Р с нормально замкнутыми контактами. При нормальной работе электродвигателя напряжение в точке 0′ равно нулю и ток через обмотку реле не протекает. При отключении одного из линейных проводов сети нарушается электрическая симметрия трехфазной системы, в точке 0′ появляется напряжение, реле Р срабатывает и контактами Р1 обесточивает обмотку магнитного пускателя — двигатель отключается.
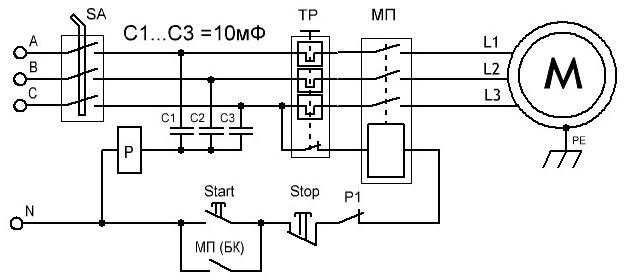
Реле типа МКУ, на рабочее напряжение 36 V .
Конденсаторы С1—С3 — бумажные, емкостью 4—10 мкФ, на рабочее напряжение не ниже удвоенного фазного.
По сравнению с предыдущими схемами это устройство обеспечивает более высокую чувствительность, вследствие которой двигатель иногда может отключиться в результате нарушения электрической симметрии, вызываемой подключением посторонних однофазных потребителей, питающихся от этой сети.
Для снижения чувствительности нужно применить конденсаторы меньшей емкости.
Принцип работы устройства также основан на том, что при обрыве одной фазы образуется напряжение смещения нейтрали, которое можно использовать для защиты двигателя.
Для реализации указанного способа создается искусственная нейтраль с помощью трех конденсаторов С1-СЗ. При наличии всех трех фаз электросети А, В и С напряжение между искусственной нейтралью и нулевым проводом N практически равно нулю, а при обрыве любой фазы возникает напряжение смещения.
Это напряжение выпрямляется с помощью диодного моста VD1, в диагональ которого включено электромагнитное реле P. Конденсатор С4 блокирует срабатывание реле в пусковом режиме. Нормально замкнутые контакты P1 при срабатывании реле размыкаются и разрывают цепь питания катушки магнитного пускателя МП, в результате электродвигатель М отключается от сети.
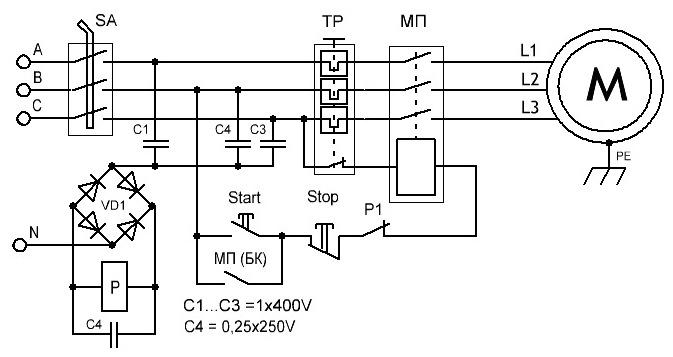
В устройстве использовано реле постоянного тока типа РП21, рассчитанное на рабочее напряжение 24 V с сопротивлением обмотки 200 Ом.
Контактная система реле допускает ток до 5А.
В случае если напряжения смещения окажется недостаточно для срабатывания реле, необходимо увеличить емкости конденсаторов, образующих искусственную нейтраль. При срабатывании реле в режиме пуска можно увеличить емкость конденсатора С4 или отрегулировать контактную систему магнитного пускателя, добиваясь одновременного замыкания его силовых контактов.
Учитывая, что все эти устройства защиты имеют один общий недостаток, заключающийся в том, что они реагируют на обрыв фазы только до аппарата защиты и не реагируют на обрывы фаз, происходящие за пределами устройства, данные устройства необходимо монтировать в непосредственной близости от электродвигателя.
Если обрыв произойдет на отрезке между устройством и обмотками электродвигателя, или в самом электродвигателе защита работать не будет.
В. Г. Бастанов «300 Практических советов» стр. 17-19
Электрический двигатель постоянного тока
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
 Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
 Рисунок 2. Схемы подключения обмоток статора ДПТ
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
 Рисунок 3. Ротор с тремя обмотками
Рисунок 3. Ротор с тремя обмотками  Рисунок 4. Якорь со многими обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
 Рисунок 5. Схема электромотора с многообмоточным якорем
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
 Рис. 6. Принцип работы ДПТ
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
 Примеры механических характеристик ДПТ независимого возбуждения
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
 Пример регулировочных характеристик двигателя с якорным управлением
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
Защита асинхронного двигателя – способы и схемы
Если правильно эксплуатировать асинхронный двигатель, он прослужит очень долго. Однако существуют факторы, способные сократить срок его службы, и их требуется нейтрализовать. В случае входа в аварийный режим электромотор должен быть быстро и своевременно отключен, иначе он сгорит.
К стандартным и часто встречающимся аварийным ситуациям относятся:
- Короткое замыкание (КЗ). В этом случае срабатывает защита, которая отключает мотор от сети.
- Перегрузка, из-за которой происходит перегрев двигателя.
- Уменьшение или исчезновение напряжения.
- Отсутствие напряжения на одной фазе.
Для защиты служат плавкие предохранители, магнитные пускатели или реле. Плавкие предохранители является одноразовыми, и после сгорания их приходится заменять. Автоматические переключатели с коммутациями срабатывают и при перегрузках, и при КЗ. Реле и магнитные пускатели бывают многократного действия с автоматическим самовозвратом или с ручным возвратом.
Защита от КЗ настраивается с учетом 10-кратного превышения номинального тока токами пуска и торможения. При местных замыканиях в обмотках мотора защита должна срабатывать, когда ток меньше, чем при пуске. В защите также предусматривают задержку отключения, и она срабатывает, если за это время потребляемый из сети ток сильно возрастет. Если защита от перегрузки действует слишком часто, скорее всего, мощность мотора не соответствует его назначению. Ложные срабатывания устраняют, соответственно выбирая и регулируя компоненты защиты.
Следует помнить, что любые способы и схемы защиты асинхронного электродвигателя должны быть не только просты, но и надежны.
Короткие замыкания, а также защита от перегрузок
Плавкие вставки – простейшая защита от коротких замыканий для моторов мощностью до 100 кВт. Если перегорят не все 3 предохранителя, могут отключиться только 1 или 2 фазные обмотки.
Если переходный процесс длится 2-5 секунд, номинальный ток предохранителя не должен быть меньше 40 % величины пускового тока, а если 10-20 секунд – то минимум 50 %. При неизвестной величине пускового тока и мощности Р мотора меньше 100 кВт примерная величина номинального тока I вставки выбирается так:
- при U 500 вольт I = 4,5 Р;
- при U 380 вольт I = 6 Р;
- при U 2200 вольт I = 10,5 Р.
Тепловая защита
Тепловое реле – это биметаллическая пластина, нагреваемая током обмоток мотора. Деформируясь, она активизирует контакты, отключающие мотор. Тепловые реле могут встраиваться в магнитные пускатели. Следует принимать в расчет максимальное напряжение в сети, при котором допускается применение теплового реле, и ток, при котором реле работает долгое время и не активизируется.
Тепловое реле не может реагировать на токи короткого замыкания. Не действуют на него и недолгие перегрузки, которые недопустимы. Поэтому рекомендуется совмещать использование теплового реле с плавкими вставками.
Специальный датчик тепла защищает электромотор от перегрева еще успешнее. Он устанавливается на самом электромоторе. Некоторые двигатели имеют встроенный биметаллический датчик, представляющий собой контакт, который подключен к защите.
Понижение напряжения и исчезновение фазы
Если асинхронный электромотор работает с полной нагрузкой, а напряжение при этом понижено, то он начинает быстро нагреваться. Если в него встроен температурный сенсор, включится тепловая защита.
Если же температурного сенсора не имеется, надо обеспечить защиту электродвигателя от падения напряжения. В таком случае используются реле. Когда уменьшается напряжение, они срабатывают и подают сигнал на отключение электродвигателя. Исходное состояние защиты может восстанавливаться вручную или автоматически; при этом происходит задержка во времени для каждого электромотора при их группе. В противном случае при одновременном групповом запуске после восстановления напряжение в сети может снова понизиться, и произойдет новое отключение.
Правила устройства и эксплуатации электроустановок требуют защиты от исчезновения фазы тока только в случаях экономически нецелесообразных последствий. Экономически выгоднее не изготавливать и устанавливать такую защитную систему, а устранить причины, приводящие к режиму работы только на двух фазах.
Новейшими устройствами для защиты электромоторов можно назвать автоматические выключатели, способные к воздушному гашению дуги. В некоторых конструкциях совмещаются возможности рубильника, контактора, максимального реле и термореле. В подобных моделях мощная взведенная пружина размыкает контакты. Ее освобождение зависит от того, каков исполнительный элемент – электромагнитный или тепловой.
Таким образом, защита асинхронного двигателя, способы и схемы которой изложены выше, должна реализовываться пользователем в обязательном порядке.
Схемы управления электромобилем или электромобиль своими руками
Все чаще мировые автопроизводители обращают свое внимание на автомобили с электрическим приводом. Если раньше это были лишь небольшие городские авто, то сейчас на электрическом приводе строятся настоящие суперкары с несколькими сотнями «электрических» лошадиных сил под капотом. В статье рассмотрим основные принципы управления и устройства электромобиля.
Основой для всех электромобилей служат аккумуляторные батареи (батареи устанавливаются даже в машинах с гибридным приводом) и электрический двигатель. Естественно, что для управления современными электронными системами необходим микроконтроллер, который в зависимости от сигналов задания и управления регулирует скорость вращения электродвигателя. Для задания скорости автомобиля с электрическим приводом, в простейшем случае применяется потенциометр.

К электрической части машины также предъявляются определенные требования. Во-первых, это мощность и количество приводных электродвигателей. Здесь возможно несколько вариантов реализации. Самая простая схема – один электродвигатель мощностью в 5…10 кВт. Самый сложный вариант – по одному электродвигатели на каждое колесо. Подобная конструкция уже давно применяется на самосвалах большой грузоподъемности. Во-вторых, исходя из применяемого количества электродвигателей и с учетом потребляемой ими мощности, необходимо выбрать количество аккумуляторных батарей. При этом стоит учитывать, что чем больше батарей будет установлено в автомобиль, тем тяжелее он окажется, что отрицательно скажется на динамике и дальности езды автомобиля. При чересчур малом заряде аккумуляторов дальность поездок также будет ограничена.
Некоторые умельцы переделывают уже серийные авто с двигателем внутреннего сгорания и устанавливают в них электродвигатели. Сделать электромобиль своими руками, пусть и не с самыми выдающимися характеристиками, под силу каждому. Сейчас же попробуем разобрать, наверное, самую сложную часть электромобиля — систему управления на микроконтроллере.
Возможность управления электромобилем – основная задача, которую обеспечивает микроконтроллер. Если электродвигатель напрямую подключить к электродвигателю, то он будет вращаться практически на максимальных оборотах (скорость вращения определяется нагрузкой). Вариант с реостатным управлением электромобилем (аналогичная технология применяется в городском электрифицированном транспорте старых образцов) рассматривать не будем, так как потери в этом случае слишком велики.
Лучшим вариантом для управления скоростью вращения электромобиля, сделанного своими руками, будет управление с помощью изменения напряжения питания электродвигателя. Для этого необходимо собрать достаточно простую схему на базе микроконтроллера.

Помимо микроконтроллера схема содержит импульсный генератор для задания частоты вращения, переменный резистор и силовую часть (формирует напряжение на электродвигателе).

Выше приведены две принципиальные схемы системы управления электромобилем. Принципы действия этих схем похожи, однако построены они на различной элементной базе. Если нет желания изготавливать схему самостоятельно, то возможно купить уже готовый преобразователь.
