
Функциональные схемы ДВС
Функциональные схемы ДВС




![]()
![]()
![]()
![]()
Современный двигатель внутреннего сгорания (ДВС) представляет собой совокупность взаимодействующих элементов (рис. 1.4), к числу которых относится потребитель 8, собственно двигатель 7, содержащий блок с камерами сгорания, цилиндропоршневыми группами и коленчатым валом. Входными координатами собственно двигателя (рис. 1.5,а) являются цикловые подачи топлива gц, воздуха Gд и нагрузка N, а выходными координатами — ω (угловая скорость коленчатого вала) и Gг (подача газа в выпускной коллектор).
Для топливной аппаратуры 2 (см. рис. 1.4) цикловая подача топлива gц — выходная координата, а положение h органа управления рейки 5 — входная координата (рис. 1.5,б). Так как gц золотниковых топливных насосов заметно зависит от угловой скорости ωн кулачкового вала, то ωн — вторая входная координата топливной аппаратуры.
Впускной коллектор 1 (см. рис. 1.4) получает воздух от компрессора 3 в количестве Gк в единицу времени (входная координата) и отдает его цилиндрам двигателя в количестве Gд в единицу времени (выходная координата, рис. 1.5,в).
Аналогичную функциональную схему имеет выпускной коллектор 6 (см. рис. 1.4), у которого Gг (поступление газа из цилиндров двигателя 7) — входная координата и GT — подача газа к турбине 4 — выходная координата (рис. 1.5,г).
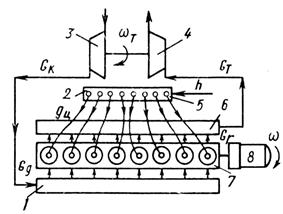
Рис. 1.4 Схема дизеля с автономным турбонаддувом
Входными координатами компрессора (рис. 1.5,д) являются ωк — угловая скорость ротора турбокомпрессора, Ga — количество воздуха, поступающего из подводящего патрубка с воздушным фильтром и hк — положение органа управления (при регулируемом турбонаддуве). Выходной координатой является подача воздуха Gк в единицу времени во впускной коллектор. Для турбины (рис. 1.5,е) поступление газа GT из выпускного коллектора в единицу времени и hT — положение органа управления турбиной (при регулируемом турбонаддуве) — входные координаты, а ωк и Gyx — количество таза, уходящего из турбины в единицу времени — выходные координаты. При свободном входе воздуха в компрессор и выпуске газа из турбины координаты Ga и Gyx в функциональных схемах не учитываются. Совокупность функциональных ‘ схем элементов (рис. 1.5,а — е) дает возможность составить функциональную схему комбинированного двигателя в целом. На рис. 1.5,ж показана такая схема для дизеля с автономным турбокомпрессором (см. рис. 1.4).
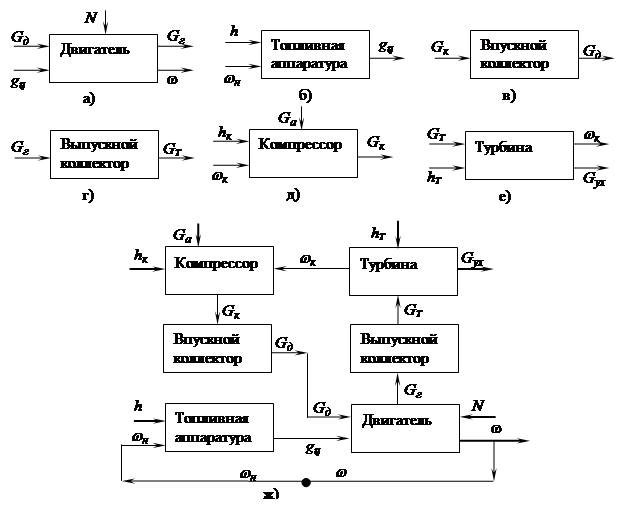 |
Рис. 1.5 Функциональные схемы двигателя внутреннего сгорания (как регулируемого объекта) и его элементов
Функциональная схема автоматизированного электропривода
В соответствии с приведенным выше определением электропривод представляет собой электромеханическую систему, электрическая часть которой состоит из электрических преобразователей, электромеханического преобразователя и системы управления, а механическая включает в себя все связанные движущиеся массы привода и механизма. Соответствующая этому определению функциональная схема современного автоматизированного электропривода представлена на рис. 1.1.
На рис. 1.1 широкими линиями со стрелками обозначены потоки силовой энергии, а тонкими линиями – информационные потоки. Стрелки определяют направление передачи энергии или информации.
В состав автоматизированного электропривода входят следующие элементы:
– коммутационная и защитная аппаратура (КЗА);
– электрический преобразователь энергии;
– электромеханический преобразователь энергии – электрический двигатель;
– механический преобразователь энергии;
– система управления электропривода (САУ).
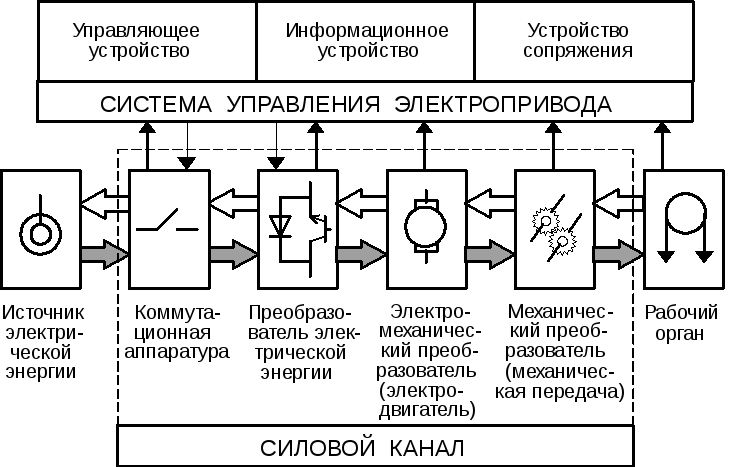
Рис. 1.1. Функциональная схема современного автоматизированного электропривода
Система автоматического управления электропривода содержит управляющее устройство, информационное устройство и устройство сопряжения.
Коммутационная и защитная аппаратура, электрический преобразователь энергии, электромеханический преобразователь энергии и механический преобразователь энергии образуют силовой канал электропривода.
Коммутационная и защитная аппаратура, электрический преобразователь энергии и электрическая система электродвигателя образуют электрическую систему электропривода (ЭС).
Вращающаяся часть электродвигателя (ротор, якорь), механическая передача производственного механизма с исполнительным (рабочим) органом (ИО) рабочей машины образуют механическую систему электропривода (МС).
Приведем определения понятиям преобразователей, входящих в силовой канал электропривода [3].
Преобразователь электрической энергии – это электротехническое устройство, преобразующее электрическую энергию с одними значениями параметров и/или показателями качества в электрическую энергию с другими значениями параметров и/или показателей качества.
Электродвигатель – это электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую энергию.
Механическая передача – это механический преобразователь, предназначенный для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласования вида и скоростей их движения.
Если в качестве электромеханического преобразователя используется электродвигатель постоянного тока, то такой привод является электроприводом постоянного тока, если же в качестве электромеханического преобразователя используется электродвигатель переменного тока, то такой привод является электроприводом переменного тока.
Направления развития электропривода на современном этапе
Индивидуальный электропривод является основным энергетическим исполнительным элементом электромеханических систем комплексной механизации и автоматизации. В современной иерархии управления технологическими процессами электропривод занимает низшую ступень, на которой выработанные высшими уровнями управления материализуются в силовые перемещения исполнительных органов в соответствии с заложенными в системе управления электропривода законами движения. Поэтому физические свойства электропривода и его регулировочные свойства играют решающую роль в технологической автоматике. Отмеченная роль электропривода обуславливает его дальнейшее совершенствование и развитие.
Назовем основные направления развития электропривода производственных механизмов и технологических комплексов на современном этапе.
1. Расширение области применения регулируемого электропривода, главным образом за счет частотно-регулируемого электропривода переменного тока с асинхронными короткозамкнутыми двигателями.
2. Интенсивное повышение технологических требований к динамическим и точностным показателям электропривода, расширение и усложнение его функций, связанных с управлением технологическими процессами, и соответствующее возрастание сложности САУ электроприводов.
3. Стремление к унификации элементной базы электропривода, созданию унифицированных комплектных электроприводов путем использования современной микроэлектроники и блочно-модульного принципа построения.
4. Упрощение кинематических цепей машин и механизмов, использование безредукторного электропривода и стремление к органическому конструкционному слиянию двигателей и механизма.
5. Энергетические показатели как мощных уникальных, так и массовых электроприводов малой и средней мощности приобретают особую остроту и важнейшее хозяйственное значение. Электрический привод является крупнейшим потребителем электрической энергии. Из всего огромного объёма электроэнергии, вырабатываемой в мире, примерно (60–70)% потребляют электроприводы и преобразуют её в механическую энергию, необходимую для работы машин и механизмов в производстве и быту.
Что такое функциональная схема двигателя
Современный двигатель внутреннего сгорания является сложной машиной, состоящей из ряда разнородных элементов, взаимодействующих между собой в процессе работы (рис. 18).

К числу таких элементов относится прежде всего собственно двигатель 4, включающий камеру сгорания, шатунно-поршневую группу и коленчатый вал. В процессе работы собственно двигатель, с одной стороны, получает топливо в виде цикловой подачи g ц через форсунку от топливного насоса 6 высокого давления и воздух в количестве G д в секунду из впускного коллектора 8, а с другой — отдает энергию потребителю 5 в виде угловой скорости ? коленчатого вала и отработавшие газы в количестве в г в секунду в выпускной коллектор 3. Таким образом, двигатель 4 имеет два входных воздействия ( G г и ?) стороны связанных с ним предшествующих элементов и два выходных воздействия (?; G д ) на последующие элементы. Если затем учесть в качестве входной координаты нагрузку N со стороны потребителя 5, то функциональная схема собственно двигателя получит вид, представленный на рис. 19, а.
У топливоподающей аппаратуры как одного из элементов комбинированного двигателя выходным воздействием (на собственно двигатель) является цикловая подача топлива g ц . Значение ее определяется положением h органа управления 7 и очень часто угловой скоростью ? н кулачкового вала топливного насоса 6. Изложенное свидетельствует о том, что функциональная схема топливоподающей аппаратуры имеет два входных (? н ; h ) и одно выходное g ц воздействия (рис. 19, б ).

Отдельными элементами комбинированного двигателя, непосредственно связанными с собственно двигателем 4 (см. рис. 18), являются впускной 8 и выпускной 3 коллекторы. Впускной коллектор 8 в качестве выходного воздействия (на собственно двигатель) имеет секундную подачу воздуха G д в цилиндры двигателя, а входным воздействием (со стороны компрессора) является секундная подача компрессором воздуха G к в объем впускного коллектора (рис. 19, в) В выпускном коллекторе (рис. 19, г) входное воздействие (со стороны собственно двигателя) — секундная подача отработавшего газа и выходное воздействие — секундный расход отработавшего газа в т через турбину (рис. 19, г ). С впускным коллектором 8 (см. рис. 18) непосредственно связан компрессор 1, поэтому выходным воздействием последнего (на впускной коллектор) является секундная подача воздуха G к . Входными его воздействиями являются угловая скорость ? к ротора турбокомпрессора 1—2 и поступление воздуха G а из окружающей атмосферы. Функциональная схема компрессора показана на рис. 19, д. С выпускным коллектором 3 турбина 2 связана так, что ее входным воздействием является секундное поступление отработавшего газа G т из выпускного коллектора 3 , а выходными воздействиями— количество газа G вых , выпускаемого в атмосферу в секунду и угловая скорость ? к ротора турбокомпрессора. В некоторых случаях на комбинированных двигателях устанавливают регулируемые компрессор и турбину, настройка характеристик которых может изменяться в зависимости от режима работы двигателя: если h к и h т — положения органов управления соответственно компрессором и турбиной, то эти воздействия для указанных элементов также должны учитываться в качестве входных (рис. 19, д, е).
Знание функциональных схем элементов двигателя позволяет построить функциональную схему комбинированного двигателя в целом (рис. 20, а). Кружочками на соответствующих стрелках-связях, как уже отмечалось, обозначено наличие в воздействии одного элемента на другой постоянного для всех режимов передаточного отношения.
В двигателе, не имеющем наддува, функциональная схема существенно упрощается, так как сохраняются лишь два элемента: собственно двигатель и топливоподающая аппаратура (рис. 20, б).
В тех случаях, когда нет необходимости в функциональной схеме раскрывать внутренние взаимосвязи между элементами (например, собственно двигателя и топливоподающей аппаратуры и др.), весь двигатель, в том числе и комбинированный, можно изобразить одним прямоугольником, как это показано на рис. 15, б.
Составление развернутой функциональной схемы помогает расчленить комбинированный двигатель на его составные элементы с целью предварительного изучения их статических и динамических свойств.
Большая Энциклопедия Нефти и Газа
Функциональная схема — система — управление
Функциональная схема системы управления электроприводом показана на рис. 6.17. Все узлы и блоки системы управления выполнены на цифровых интегральных микросхемах, за исключением блока регулирования БР и управляемого генератора УГ, являющихся цифро-аналоговыми устройствами. [2]
Функциональная схема системы управления загрузкой электроприводов показана на рис. 3.23. Один из приводов выбирается ведущим и в нем реализуется типовая система регулирования скорости с блоком управления моментом БУМ и регулятором скорости PC с ограничением выходного сигнала. С учетом задания v3 привод обеспечивает скорость v движения ИО. Задания устанавливаются с помощью устройств заданий моментов УЗМ так, как это выполнялось в случае независимого управления соотношением скоростей. Устанавливая конкретные значения коэффициентов соотношения моментов kCM, обеспечивают соответствующие им нагрузки электроприводов. [3]
Функциональная схема системы управления прессом с махо-вичным приводом приведена на рис. 4.48, где / — стол, 2 — заготовка, 3 — молот, 4 — шарнир, 5 — кулисный механизм, 6 — электромагнитная муфта, 7 — маховик. Электропривод с Ml и БУ1 является главным электроприводом, а электроприводы с М2, МЗ, М4 и БУ2, БУЗ, БУ4 — электроприводами подач, выполняющими перемещение обрабатываемого изделия с механизмами стола относительно оси удара молота. Блок БУ5 управляет электромагнитной муфтой. [4]
Функциональная схема одноконтурной кондуктометрической системы управления дозированием коагулянта показана на рис. IV.15. Она основана на применении дифференциального кондуктометра КК-1 с реконструированной измерительной мостовой схемой и регулирующего клапана с линейной расходной характеристикой. Клапан питается из бака рабочего раствора, уровень которого колеблется. Расход раствора коагулянта контролируется магнитным расходомером и дублируется указателем положения исполнительного механизма клапана. Система работает по отклонению от заданного значения приращения удельной проводимости воды Две. [6]
Изобразите функциональную схему системы управления скоростью движения автомобиля, одним из элементов которой является водитель. [7]
В функциональной схеме системы управления ( рис. 24) элемент сравнения ЭС сравнивает текущее значение регулируемого параметра т, вырабатываемого измерительным устройством ИзУ, с его заданным значением х3, поступающим от за-датчика 3, и посылает сигнал рассогласования ( отклонения) е на вход формирующего устройства ФУ. [8]
С целью выбора лучшей функциональной схемы системы управления , удовлетворяющей одновременно требованиям к рабочим характеристикам электропривода и требованиям к надежности, составляют несколько ( 2 — 3) возможных ее вариантов. При составлении функциональных схем основное внимание уделяют выявлению взаимных связей между узлами, а не их элементному составу. [10]
На рис. 4.6 приведена функциональная схема системы управления тиристорным электроприводом буровой лебедки с реверсом поля двигателя. Силовая часть электропривода с реверсом поля двигателя строится на основе нереверсивного ТП, унифицированного с силовыми преобразователями для других главных электроприводов, и реверсивного тиристорного возбудителя. Последний может выполняться как с раздельным, так и с совместным управлением группами вентилей. С учетом специфики работы электропривода с реверсом поля двигателя в систему управления дополнительно введены следующие компоненты. [12]
На рис. 4.69 6 показана функциональная схема системы управления с пневмосветовой передачей. Устройства 1, 2, 3 осуществляют передачу команд путем импульсно-временного и частотного кодирования. Выходным устройством 4 являются несколько светодиодов, соединенных параллельно. Для преобразования электрического сигнала в световой могут использоваться и другие источники излучения, как, например, лазеры, импульсные ксеноновые и неоновые лампы. Питание передающего устройства осуществляется от сети переменного тока 220 В или от сети постоянного тока 24 В. [13]
На рис. 1.5 представлен вариант функциональной схемы системы управления . [15]
