Большая Энциклопедия Нефти и Газа
Большая Энциклопедия Нефти и Газа
Динамическое торможение — асинхронный двигатель
Динамическое торможение асинхронного двигателя осуществляется подключением обмотки статора к источнику постоянного тока. Машина работает как синхронный генератор с неподвижными полюсами. Части механических характеристик ( рис. 5.8) 5 — 0 ( для двигателя с короткозамкнутым ротором) и 5 — 0 ( на реостатной характеристике двигателя с фазным ротором) соответствуют динамическому торможению. [2]
Динамическое торможение асинхронных двигателей подобно динамическому торможению двигателей постоянного тока и заключается в том, что статор отключается от сети переменного тока и на время торможения подключается к источнику постоянного тока. [3]
Динамическое торможение асинхронного двигателя осуществляется обычно включением обмотки статора на сеть постоянного тока; обмотка ротора при этом замыкается на внешние резисторы. Для перехода из двигательного режима в режим динамического торможения контактор / С / ( рис. 3.32) отключает статор от сети переменного тока, а контактор К2 присоединяет обмотку статора к сети постоянного тока. Для ограничения тока и получения различных тормозных характеристик в цепи ротора предусмотрены внешние резисторы. [4]
Динамическое торможение асинхронного двигателя осуществляется обычно включением обмотки статора на сеть постоянного тока; обмотка ротора при этом замыкается на внешнее сопротивление. Для перехода из двигательного режима в режим динамического торможения контактор / / / ( рис. 2 — 43) отключает статор от сети переменного тока, а контактор 2Л присоединяет обмотку статора к сети постоянного тока. Для ограничения тока и получения различных тормозных характеристик в цепи ротора предусмотрено внешнее сопротивление. [6]
Динамическое торможение асинхронного двигателя возникает, если в обмотку статора подается постоянный ток, а ротор вращается за счет механической энергии, поступающей со стороны вала от постороннего источника, либо за счет собственного запаса кинетической энергии. Тормозной момент образуется в результате взаимодействия неподвижного потока машины с током, вызванным этим потоком, во вращающемся роторе. [8]
Динамическое торможение асинхронного двигателя осуществляется путем подключения обмотки статора к сети постоянного тока. Обмотка ротора двигателя с контактными кольцами замыкается при этом на сопротивление. Наиболее распространенная схема включения двигателя в режиме динамического торможения приведена на рис. 2 — 26 а. Существуют также другие схемы включения обмоток статора на постоянный ток, но физические процессы, происходящие в двигателе, остаются неизменными для любой схемы. Постоянный ток обмотки статора создает неподвижное магнитное поле. [9]
Динамическое торможение асинхронных двигателей обычно применяют для быстрой и точной остановки нереверсивного привода. Схема на рис. 30, а предподчти-тельна при частых пусках и выключениях электропривода с неизбежными кратковременными бросками тока, а также при наличии отдельного источника постоянного тока. Здесь предусмотрена защита двигателя при помощи максимальных реле РМ вместо тепловых, недостаточных в таких условиях эксплуатации. При нажатии пусковой кнопки П линейный контактор Л включает двигатель, а замыкающий блок-контакт Л включает реле динамического торможения РДТ. Выключение двигателя и его автоматическое торможение осуществляется при нажатии кнопки С, чем обесточивается линейный контактор Л, и включается контактор торможения Т блок-контактом Л, В обмотку статора подается постоянный ток через замыкающие контакты Т; реле РДТ выключается, а его контакт РДТ разрывает цепь контактора Т через заданный промежуток времени, достаточный для останова двигателя. [11]
Режим динамического торможения асинхронного двигателя имеет две разновидности: торможение с независимым возбуждением постоянным током и режим торможения с самовозбуждением. [12]
Недостатком динамического торможения асинхронного двигателя обычно бывает потеря всей энергии торможения в сопротивлениях. [13]
Для динамического торможения асинхронного двигателя статор отключают от сети и две его любые фазы подключают к сети постоянного тока. [15]
Торможение электрических приводов
Электрическим торможением называется такой режим электропривода, при котором вращающий момент электродвигателя направлен навстречу направлению вращения его вала. Электрическое торможение используется для быстрой и точной остановки или изменения направления движения производственного механизма. По физической сущности электрическое торможение является генераторным режимом, так как именно в этом случае электромагнитный момент машины направлен противоположно вращению вала, а к валу подводится механическая энергия. Вырабатываемая в электрической машине электрическая энергия в зависимости от особенностей тормозного режима либо возвращается в электрическую сеть, либо рассеивается в активных элементах цепей машины.
Существуют два способа электрического торможения: динамическое и противовключением. Динамическое торможение асинхронных двигателей создают отключением обмотки статора от питающей сети переключением их на источник постоянного тока. При этом в обмотках статора создается неподвижное магнитное поле. Во вращающейся по инерции обмотке ротора индуцируется электрический ток. В результате взаимодействия магнитного поля возбуждения статора и тока ротора возникает вращающий момент, направленный противоположно вращению вала (для гашения энергии, вырабатываемой в обмотках фазного ротора, к ним на кольцах подключают тормозные резисторы).
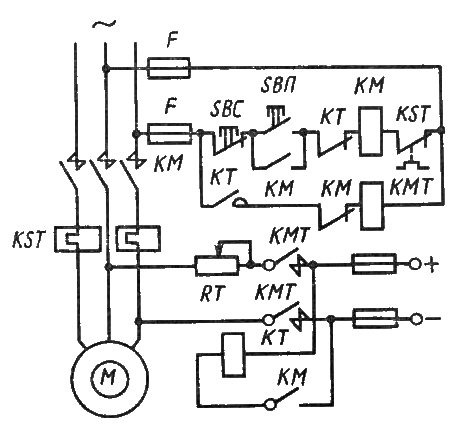
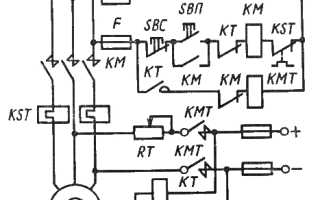
Рис. 93. Схема управления асинхронным двигателем с короткозамкнутым ротором с использованием динамичного торможения
В схеме динамического торможения асинхронного двигателя с короткозамкнутым ротором (рис. 93) используется реле времени КТ, которое питается от источника постоянного тока. Нажатие кнопки SBC отключает электродвигатель, контакт КМ размыкается, что приводит к присоединению обмотки статора двигателя к сети постоянного тока. Начинается режим торможения, продолжительность которого ограничивается уставкой реле КТ. По истечении установленной выдержки времени контакт реле КТ разомкнется, цепь постоянного тока отключается от статора, цепь приводится в исходное положение.
Чтобы избежать одновременного включения контакторов КМ, КМТ, их катушки взаимно блокированы размыкающими вспомогательными контактами КМ и КМТ. Резистор R1 служит для ограничения постоянного тока. Предохранители F защищают цепь постоянного тока от короткого замыкания.
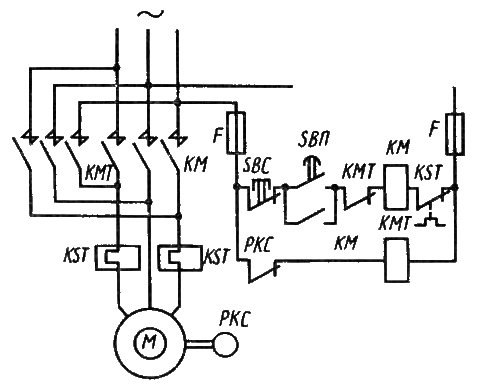
Рис. 94. Схема управления асинхронным двигателем с короткозамкнутым ротором с использованием торможения противовключением
Торможение противовключением создается реверсированием двигателя на ходу. Для асинхронного электродвигателя оно осуществляется с помощью реле контроля скорости РКС, которое механически связано с валом двигателя (рис. 94). Контакт реле РКС при небольшой угловой скорости разомкнут. Отключение электродвигателя осуществляется нажатием кнопки SBC, после чего замыкается вспомогательный размыкающий контакт КМ. Так как контакт реле РКС замкнут, то контактор КМТ получает питание и статор оказывается подключенным к сети. С включением контактора КМТ две фазы переключаются, изменяя порядок чередования. Реле РКС размыкает контакт, когда угловая скорость двигателя становится близкой к нулю, катушка КМТ отключается, и двигатель останавливается.
Электродинамическое торможение асинхронного двигателя схема
Схемы торможения менее распространены, чем схемы пуска. Действительно, если двигатель не включен, то и тормозить его незачем. Но и без специального торможения двигатель, отключенный от сети, затормозится силами трения. Кроме того, существуют механические, гидравлические и другие тормоза, которые мы здесь не рассматриваем.
Мы остановимся только на схемах электрического торможения. Они очень просты, не требуют изготовления тормозных барабанов и дисков, как в механических тормозах.
Быстро затормозить электродвигатель можно, используя схему реверсивного магнитного пускателя. Конечно, для этого ее нужно несколько переделать. Принцип торможения поясняется рис. 14.9. На рис. 14.9, а электрическая машина работает в двигательном режиме. Магнитное поле вращается с угловой скоростью  , а ротор двигателя — с несколько меньшей скоростью
, а ротор двигателя — с несколько меньшей скоростью  в ту же сторону. Поменяем местами два провода, подключающих статор к сети (рис. 14.9, б). Магнитное поле изменит направление вращения. Но массивный ротор будет по инерции вращаться в ту же сторону. Раньше магнитное поле вращало ротор, теперь оно будет его интенсивно тормозить. Если не предпринять каких-либо действий, произойдет реверс двигателя, его ротор начнет вращаться в другую сторону. Поэтому необходимо тщательно следить за скоростью ротора, и в тот момент, когда торможение закончится и скорость будет близка к нулю, машину следует отключить от сети.
в ту же сторону. Поменяем местами два провода, подключающих статор к сети (рис. 14.9, б). Магнитное поле изменит направление вращения. Но массивный ротор будет по инерции вращаться в ту же сторону. Раньше магнитное поле вращало ротор, теперь оно будет его интенсивно тормозить. Если не предпринять каких-либо действий, произойдет реверс двигателя, его ротор начнет вращаться в другую сторону. Поэтому необходимо тщательно следить за скоростью ротора, и в тот момент, когда торможение закончится и скорость будет близка к нулю, машину следует отключить от сети.
Такой метод торможения называют противовключением, или противотоком.
Для его осуществления нужны два контактора — рабочий и тормозной. Силовая часть схемы представлена на рис. 14.10, а. С ротором двигателя связано специальное реле SR — реле контроля скорости.

Рис. 14.9. Торможение противовключением: а — машина работает в двиг гатёльном режиме; б — магнитное поле реверсируется и тормозит ротор
Его контакты замыкаются, когда ротор двигателя разгоняется примерно до 100 об/мин.
Цепи управления (рис. 14.10, б) напоминают реверсивный магнитный пускатель. Первый контактор КМ1 используют для работы, второй КМ2 — для торможения. В цепь катушки второго контактора включены замыкающие контакты реле контроля скорости SR и размыкающие контакты контактора К М2.
На рис. 14.10, б изображена схема в исходном положении, рассмотрим теперь этапы ее работы.
1. Нажмем кнопку Пуск (рис. 14.10, в). Контактор КМ1 сработает, поставит себя на самопитание и подключит статор двигателя к сети. Одновременно с этим его вспомогательные контакты разомкнут цепь катушки контактора КМ2. Двигатель начнет разгоняться. В процессе разгона контакты реле контроля скорости замкнутся, но тормозной контактор не работает, так как цепь его катушки остается разомкнутой. Таким образом, схема подготовлена для последующего торможения.
2. Нажмем кнопку Стоп (рис. 14.10,г). Цепь катушки контактора КМ1 разомкнется. Двигатель отключится от сети. Одновременно с этим замкнутся вспомогательные контакты КМ1 в цепи катушки контактора КМ2. Поскольку ротор двигателя по инерции продолжает вращаться и контакты SR замкнуты, цепь катушки КМ2 также замкнута. Контактор КМ2 сработает и возникнет интенсивное торможение.
3. Двигатель затормозился примерно до 100 об/мин, контакты SR разомкнулись (рис. 14.10, д). Это приведет к отключению тормозного контактора КМ2. Дальнейшая остановка двигателя производится силами трения, а схема управления возвращается в исходное положение.


Рис. 14.10. Схема торможения противовключением: а — силовая схема; б — схема управления; в — пусковая кнопка нажата и отпущена, схема подготовлена к торможению; г — нажата кнопка Стоп, включен контактор торможения КМ2; д — после окончания торможения схема возвращается в исходное положение
Мы разобрали схему торможения нереверсивного электродвигателя, но противовключение возможно и для двигателя, который в процессе работы изменяет направление вращения. В этом случае схема управления несколько усложняется, но используются все равно только два контактора.

Рис. 14.11. Динамическое торможение: а — машина работает двигателем; б — неподвижное магнитное поле тормозит ротор
Если двигатель вращается Вперед, то функции тормозного контактора выполняет контактор Назад.
При реверсе назначение контакторов изменяется.
Торможение противовключением широко используется на практике. Однако у этого метода торможения есть существенные недостатки. Во-первых, при торможении в цепи статора протекает очень большой ток и выделяется большое количество тепла. Общая энергия, идущая на нагрев двигателя, примерно в 6 раз больше запаса кинетической энергии вращающихся масс. Во-вторых для торможения необходимо специальное электромеханическое реле, которое нужно пристроить к двигателю, а сделать это не всегда возможно.
Всех этих недостатков нет у динамического метода торможения. Принцип динамического торможения поясняется рис. 14.11. Слева показан двигательный режим асинхронного двигателя (рис. 14.11, а).
Для того чтобы затормозить двигатель, его статор отключают от сети переменного тока и включают на постоянное напряжение (рис. 14.11, б). Магнитное поле перестает вращаться, становится неподвижным. Однако массивный ротор двигателя по инерции продолжает вращение. Проводники ротора пересекают магнитные силовые линии неподвижного поля, в них наводится ЭДС, возникает электрический ток. В свою очередь этот ток взаимодействует с магнитным полем и сила электромеханического взаимодействия создает тормозной момент. Ротор двигателя интенсивно затормаживается.
Составим теперь схему для динамического торможения асинхронного двигателя. Прежде всего сообразим, что величина постоянного напряжения, на которое мы хотим переключить обмотку статора двигателя, должна быть значительно меньше напряжения сети. В двигательном режиме по обмотке статора протекает ток, равный

Фазное напряжение мы разделили на полное сопротивление одной фазы. Постоянный ток — это ток нулевой частоты  Индуктивное сопротивление на постоянном токе равно нулю, а полное сопротивление фазы — только активному сопротивлению. Оно много меньше, чем сопротивление фазы на переменном токе. Поэтому, если мы не хотим испортить обмотку двигателя, напряжение постоянного тока необходимо значительно снизить.
Индуктивное сопротивление на постоянном токе равно нулю, а полное сопротивление фазы — только активному сопротивлению. Оно много меньше, чем сопротивление фазы на переменном токе. Поэтому, если мы не хотим испортить обмотку двигателя, напряжение постоянного тока необходимо значительно снизить.

Рис. 14.12. Схема динамического торможения: а — силовая схема; б — схема управления
Обычно для двигателей не слишком большой мощности это напряжение составляет 30—40 В. Таким образом, в схеме торможения должны участвовать два аппарата: трансформатор для понижения напряжения и выпрямитель. Кроме того, необходимы пусковой и тормозной контакторы. Теперь мы можем составить силовую часть схемы (рис. 14.12,а). Действие ее хорошо понятно из самого рисунка.
Цепь управления изображена на рис. 14.12, б. Поясним ее работу. Если нажать кнопку SB2 Пуск, сработает контактор КМ1, двигатель подключится к сети переменного тока. Одновременно с этим произойдет блокировка цепи тормозного контактора КМ2, исключающая его случайное срабатывание.
Для торможения двигателя необходимо нажать кнопку SB1 Стоп. Кнопка Стоп двухэлементная, она коммутирует сразу две цепи. Цепь катушки контактора КМ1 разрывается, и этот контактор отключается.
Одновременно с этим замыкается цепь контактора КМ2. Контактор ставит себя на самопитание и подключает статор двигателя на постоянное напряжение. Начинается процесс торможения. Параллельно к контактору КМ2 подключена катушка реле времени КТ, его размыкающие контакты отключают тормозной контактор, когда выдержка времени заканчивается. Эта выдержка времени (уставка реле) выбирается так, чтобы к тому времени торможение полностью закончилось.
Иногда реле времени пристраивают к тормозному контактору.
Существуют также схемы, в которых реле времени нет совсем. В этом случае тормозной контактор остается включенным до следующего пуска, а ротор двигателя все время оказывается заторможенным. Электромагнитная фиксация ротора бывает необходимой во многих производственных машинах и механизмах. В такой схеме нужно исключить контакты КМ2 из цепи катушки контактора КМ1, иначе его нельзя будет включить после первого же торможения.
Электродинамическое торможение асинхронного двигателя схема
Динамическое торможение значительно повышает управляемость асинхронного двигателя шахтного подъема и полностью исключает механическое маневровое торможение, сохранив за ним лишь функции стопорения машины при нормальном и аварийном останове.
Кроме того, динамическое торможение может быть использовано в комплекте с механическим тормозом, что создает большие гарантии безопасности эксплуатации.
Простейшие схемы динамического торможения показаны на рис. 1.
Источником постоянного тока является генератор постоянного тока ГДТ с двумя обмотками возбуждения. В обмотку возбуждения ГДТ от постороннего источника подается постоянный ток, величина
которого регулируется изменением величины сопротивления СУД Т. Для обеспечения устойчивой работы устройства вводится обратная связь по току ротора от трансформатора тока или обратная связь по скорости от тахогенератора. Более эффективной является схема с обратной связью по скорости.
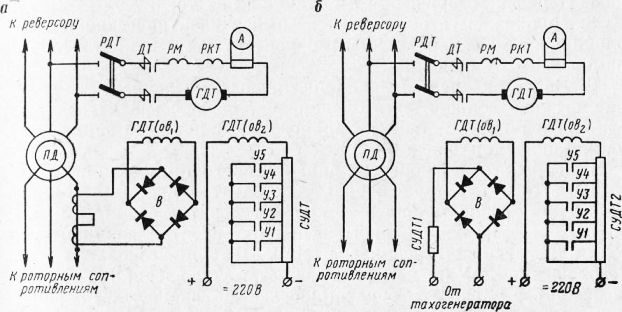
Рис. 1. Схема динамического торможения с разделенной обмоткой возбуждения генератора динамического торможения с обратной связью:
а — от трансформатора тока; б — от тахогенератора
Динамическое торможение включается контактором ДТ. Целость цепи динамического торможения контролируется реле РКТ , а защита от перегрузки осуществляется реле РМ.
Надежная работа установки с динамическим торможением может быть обеспечена при соблюдении следующих основных условий.
1. Схема динамического торможения должна исключать возможность опрокидывания подъемного двигателя при любых практически возможных режимах торможения.
2. Пониженная скорость спуска должна автоматически поддерживаться постоянной в заданных пределах независимо от изменения Угла наклона ствола или от изменения величины спускаемого груза.
3. Динамическое торможение должно осуществляться в любом положении рукоятки управления.
4. Переход с режима динамического торможения на двигатель- >| ный режим должен производиться только с нулевого положения командоконтроллера.
5. Для более надежного торможения может быть предусмотрена форсировка возбуждения при включении контакторов ускорения.
6. Для получения большего эффекта торможения необходимо > начало динамического торможения осуществлять при полностью : введенном в цепь ротора сопротивлении с последующим закорачиванием его с выдержкой времени по ступеням.
7. В схеме должно исправно работать реле, контролирующее целость цепей возбуждения и наличие в них тока.
8. Должна быть обеспечена взаимная электрическая и дуговая блокировка между реверсивными контакторами и контактором динамического торможения.
9. Во избежание появления чрезмерных и недопустимых замедлений в схеме должна быть блокировка, исключающая возможность одновременного действия аварийного механического тормоза и динамического торможения.
При мощности генератора динамического торможения до 10 кВт • в качестве генератора используют электромашинный усилитель . ЭМУ , при мощности более 10 кВт — генератор серии П или ПН, обмотка возбуждения которого питается от электромашинного усилителя или магнитного усилителя (МУ). Наличие нескольких обмоток возбуждения ЭМУ (до четырех) и обмоток управления МУ (до шести) позволяет реализовать обратные связи по скорости, напряжению и току нагрузки, повышающие устойчивость и эффективность динамического торможения.
Аппаратуру динамического торможения устанавливают на станциях управления.
В последнее время все больше вместо вращающихся агрегатов применяют статические преобразователи.
Александрийский электромеханический завод выпускает комплектные устройства динамического торможения с силовыми магнитными усилителями и кремниевыми выпрямителями на выходе. Аппаратура предназначена для управления асинхронным приводом шахтных подъемных машин и лебедок.
Станции динамического торможения питаются от сети переменного тока напряжением 380 В. Защита станций осуществляется автоматом. Для охлаждения вентилей предусмотрен вентилятор, включаемый пускателем. Ток динамического торможения регулируется подачей постоянного тока в одну из обмоток управления магнитного усилителя.
В схемах предусмотрена возможность использования четырех , обмоток управления магнитного усилителя. На лицевой панели шкафа установлены вольтметр и амперметры контроля тока нагрузки и тока управления.
В последнее время на некоторых установках динамического торможения применяют тиристорные преобразователи. Примером такого устройства может служить преобразователь, разработанный Ворошиловградским монтажно-наладочным управлением.
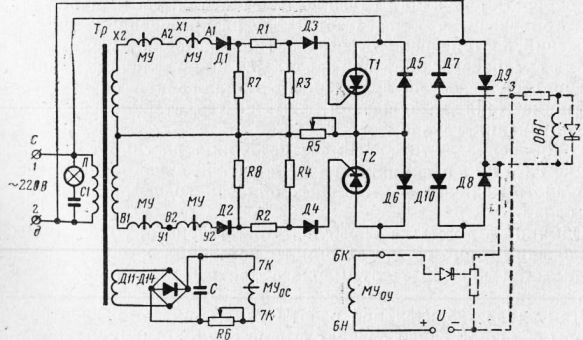
Рис. 2. Схема тирлсторного устройства динамического торможения
Схема тиристорного устройства динамического торможения показана на рис. 2. Напряжение 220 В переменного тока выпрямляется выпрямителем, состоящем из шести силовых диодов Д5—Д10 и двух тиристоров Т1 и Т2. Величина выпрямленного напряжения регулируется углом управления тиристоров Т1 и Т2.
Фазосмещающее устройство для регулирования угла управления состоит из трансформатора Тр, магнитного усилителя МУ, диодов Д1—Д4, сопротивлений R1—R9, фильтра R6—C, выпрямителя Д11—ДЫ.
Регулирование осуществляется изменением тока, протекающего по обмотке управления МУоу.
При эксплуатации устройств динамического торможения следует руководствоваться следующим.
1. При перерывах в работе и осмотрах с устройства динамического торможения и контактора динамического торможения должно быть снято напряжение. Правила ухода за контактором динамического торможения те же, что и за реверсором (см. § 3 настоящей главы).
При включении и отключении напряжения питания необходимо пользоваться резиновыми перчатками и ковриками.
2. Осматривать устройства динамического торможения необходимо один раз в сутки, а профилактические испытания и нодна-ладку производить не реже одного раза в шесть месяцев.
При периодических осмотрах необходимо проверить: изоляторы и места контактов шин и других токоведущих частей; заземление, исправность ограждения дверей, замков; нагрев генератора и ЭМУ ; показания измерительных приборов.
3. Устройства динамического торможения должны обеспечивать устойчивую работу подъемного двигателя при любых практически возможных колебаниях момента опускающегося груза. Стабилизация скорости опускания грузов обеспечивается увеличением эффекта обратной связи, что достигается перераспределением величин напряжений, поступающих от независимого источника тока возбуждения и от устройства обратной связи. Чем выше величина напряжения от обратной связи по сравнению с напряжением от независимого источника тока возбуждения, тем жестче стабилизация скорости при опускании грузов.
Напряжение от независимого источника регулируется сопротивлением СУДТ , а напряжение от обратной связи — подключением требуемого количества вторичных обмоток трансформаторов обратной связи.
Обычно в обмотке возбуждения генератора динамического торможения ток от независимого источника возбуждения устанавливается 30—40% суммарного потребного тока возбуждения.
Для удовлетворительной работы узла обратной связи трансформаторы обратной связи следует выбирать не по номинальному току ротора, а по несколько меньшему.
Реле контроля тока РКТ регулируется таким образом, чтобы оно втягивалось при токе возбуждения статора, равном 0;7—0,8 величины тока, поступающего от независимого источника возбуждения без форсировки.
Реле РКН регулируется таким образом, чтобы размыкание его контактов в цепи защиты не успевало произойти до замыкания контактов реле РКТ в цепи катушки РКН . Выдержка времени реле РКН должна быть несколько больше выдержки времени реле дуговой блокировки плюс время нарастания постоянного тока в цепи статора подъемного двигателя. Эта выдержка времени равна примерно 1,3—1,6 с. В процессе наладки эта выдержка устанавливается минимально возможной. Однако при этом должно быть надежно исключено случайное размыкание контактов РКН в цепи защиты во время включения динамического торможения.
Выдержку времени реле блокировки нулевого положения командоконтроллера РБ устанавливают минимально возможную для данного типа реле. Уставку максимального токового реле выбирают таким образом, чтобы реле срабатывало при токе, равном 1,2—1,3 пикового значения постоянного тока в цепи возбуждения статора при работе двигателя в наиболее тяжелом режиме динамического торможения.
4. После наладки устройств динамического торможения надо проверить устойчивость работы подъемного двигателя в режиме динамического торможения. Проверку осуществляют в средней части ствола следующим образом. При номинальной скорости опускания расчетного груза и отторможенной машине включают динамическое торможение в различных положениях рукоятки управления. При этом не должно происходить ни опрокидывания подъемного двигателя, заключающегося в снижении тормозного момента и увеличении скорости двигателя, ни срабатывания максимальной защиты.
Проверку следует производить с соблюдением соответствующих предосторожностей, чтобы не допустить появления чрезмерных скоростей. Предварительно необходимо проверить надежность работы предохранительного тормоза и ограничителя скорости.