
Схема пуска двигателя постоянного тока параллельного возбуждения в функции времени
Схема пуска двигателя постоянного тока параллельного возбуждения в функции времени.




![]()
![]()
![]()
![]()
Для двигателей постоянного тока применяются следующие виды автоматизированного пуска: а) непосредственный (прямой); б) в функции электродвижущей силы якоря; в) в функции тока; г) в функции времени. Во всех случаях, независимо от способа пуска, схема должна обеспечить защиту исполнительного механизма от больших ускорений, механических толчков и защиту электрического двигателя от недопустимых токов.
Наибольшее распространение на судах получил пуск в функции времени с применением электромагнитных или маятниковых реле времени и таймтакторов.
Пуск в функции времени можно осуществлять по одной из схем, данных на рис. При этом отдельные элементы схем работают в определенной последовательности по установленному графику времени, причем их работа не зависит от параметров электрической сети, частоты вращения или нагрузки двигателя, что является несомненным преимуществом таких схем.
На рисунке а приведена схема пуска в функции времени с помощью электромагнитных реле и контакторов ускорения.
Элементы схемы. Двигатель смешанного возбуждения, в цепь якоря которого включены две ступени пускового сопротивления СП; линейный контакт КЛ, имеющий два главных замыкающих контакта КЛ 1 и КЛ 2, два замыкающих блок — контакта — КЛ1, шунтирующий кнопку П, и КЛ2 в цепи катушек 2РУ, 1КУ, один размыкающий блок — контакт в цепи — катушки реле 1РУ; электромагнитные реле времени 1РУ и 2РУ, у каждого из которых есть по одному размыкающему с выдержкой времени при замыкании контакта в цепи контакторов ускорения 1КУ и 2КУ; контактор ускорения 1КУ с одним замыкающим главным контактором выключающим первую ступень пускового сопротивления СП, и одним размыкающий блок — контактом в цепи катушки реле 2РУ;
контактор ускорения 2КУ с замыкающим главным контактом, включающим вторую ступень пускового сопротивления СП; реле
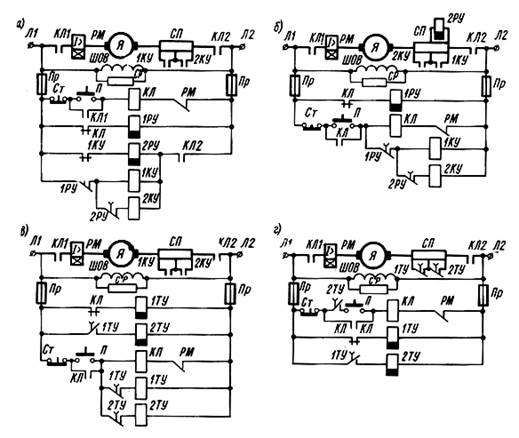
максимальное РМ с одним размыкающим контактом в цепи катушки КЛ; предохранители Пр; разрядное сопротивление СР.
Работа схемы. При подаче напряжения на Л1 и Л2 двигатель получит возбуждение от обмотки ШОВ. Через размыкающий блок -контакт КЛ под напряжение будет включена катушка реле 1РУ, которая откроет свой размыкающийся с выдержкой времени при замыкании контакт 1РУ в цепи катушек контакторов 1КУ и 2КУ. Эта электрическая блокировка предусмотрена для того, чтобы при нажатии на кнопку «Пуск» не допустить прямого пуска двигателя и обеспечить необходимую выдержку срабатывания контактора 1КУ. Схема подготовлена к пуску. Нажав на кнопку >, подаем питание на катушку контактора КЛ, который, притянув свой якорь, замкнет замыкающие главные контакты. При этом образуется цепь главного тока через все пусковое сопротивление СП. Двигатель начнет разгон по первой искусственной характеристике. Одновременно происходит перезамыкание блок — контактов, КЛ1 шунтирует кнопку П; КЛ2 подает питание на катушку 2РУ, так как блок-контакт 1КУ замкнут; КЛ обрывает цепь питания катушки 1РУ.
Катушка реле 2РУ открывает размыкающийся с выдержкой времени при замыкании контакт в цепи катушки контактора 2|КУ, предохраняя его от преждевременного включения в работу. Так как обрывается цепь катушки 1РУ, то с выдержкой времени замыкается ее замыкающий контакт и получает питание катушка контактора ускорения 1КУ. Контактор 1КУ замкнет главный замыкающий контакт и выключит первую ступень сопротивления СП из работы. Одновременно блок -контакт 1КУ обесточит катушку реле 2РУ. Двигатель разгоняется по второй искусственной характеристике. Через заданный промежуток времени закроется контакт реле 2РУ, переключив катушку контактора 2КУ под напряжение. Контактор 2КУ сработает и своим контактом выключит вторую ступень сопротивления. Двигатель работает по естественной характеристике. Окончится процесс пуска двигателя.
Защита предусмотрена такая же, как у ранее рассмотренных схем, т. е. максимальная, минимальная и нулевая, с помощью предохранителей и разрядного сопротивления.
Особенностью схемы, изображенной на рисунке б, является включение катушки реле 2РУ. Выдержка времени этого реле получается вследствие циркуляции тока в замкнутом контуре при замыкании катушки контактом 1КУ накоротко. Реле срабатывает и размыкает свой контакт из-за разности потенциалов на зажимах катушки при прохождении пускового тока по сопротивлению СП. Хотя по мере разгона двигателя пусковой ток и уменьшается, магнитные силы катушки 2РУ удерживают контакт 2РУ разомкнутым и только после закорачивания катушки с выдержкой времени замыкается ее контакт. В остальном данная схема не отличается от предыдущей.

Схема, приведенная на с помощью таймтакторов, рисунок, в, предусматривает работу с помощью таймтакторов, отрегулированных на определенную выдержку времени. Роль электромагнитных реле в схеме выполняют удерживающие катушки 1ТУ и 2ТУ со своими контактами, а роль контакторов ускорения — втягивающие катушки 1ТУ и 2ТУ. Процесс пуска не отличается от рассмотренных, но количество примененных аппаратов уменьшилось. Схема, показанная на рисунке, е, ра6отает с использованием таймтакторов с одной катушкой
и еще более упрощается. При подаче напряжения на клеммы, Л1 и Л2 срабатывает таймтактор 1ТУ, так как его катушка получает питание через размыкающий блок — контакт линейного контактора КЛ. Открывается размыкающий (с выдержкой времени при замыкании) контакт 1ТУ, который отключает первую ступень пускового сопротивления СП, и закрывается замыкающий (с выдержкой времени при открывании) контакт в цепи катушки второго таймтактора 2ТУ. Таймтактор 2ТУ срабатывает, открывает свой размыкающий (с выдержкой времени при замыкании) контакт, выключающий вторую ступень пускового сопротивления, и закрывает замыкающий (с выдержкой времени при открывании) блок — контакт в цепи кнопки П. Тем самым обеспечивается невозможность пуска при выключенном пусковом сопротивлении. Схема подготовлена к пуску, который осуществляется нажатием на соответствующую кнопку. При нажатии на кнопку П катушка КЛ окажется подключенной к источнику питания и сработает. Якорь двигателя с замыканием контактов КЛ1 и КЛ2 подключается к сети через включенное полностью пусковое сопротивление СП. Двигатель начинает разгон. Одновременно шунтируется кнопка П и обесточивается таймтактор 1ТУ. С выдержкой времени закрывается размыкающий (с выдержкой времени при замыкании) контакт 1ТУ, который выключает первую ступень пускового сопротивления из работы. Двигатель увеличивает частоту вращения.
Размыкается с выдержкой времени контакт 1ТУ и обесточивается таймтактор 2ТУ. Последний с выдержкой времени закроет свой размыкающий контакт 2ТУ, который выключит вторую пусковую ступень сопротивления. Двигатель будет работать по естественной характеристике. Процесс пуска закончен.
Недостатком рассмотренных схем является существенное влияние на процесс пуска температуры нагрева катушек реле времени и таймтакторов, так как при нагревании увеличиваются их активные сопротивления, уменьшается выдержка времени при срабатывании. Другими словами, аппараты с нагретыми катушками срабатывают быстрее, чем с холодными, и уставку их времени срабатывания необходимо рассчитать исходя из температуры нагрева.
Двигатель постоянного тока с параллельным возбуждением – схема работы
Содержание
- Характеристики двигателя постоянного тока с параллельным возбуждением
- Сферы применения двигателя
- Регулирование частоты вращения
- Двигатель с независимым возбуждением
Двигатель постоянного тока с параллельным возбуждением – это электродвигатель, у которого обмотки якоря и возбуждения подключаются друг к другу параллельно. Часто по своей функциональности он превосходит агрегаты смешанного и последовательного типов в случаях, если необходимо задать постоянную скорость работы.
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя — ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети. Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Сферы применения двигателя
Поскольку частота вращения подобных двигателей остается почти постоянной даже при изменении нагрузки, а также может изменяться при помощи регулировочного реостата, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр.).
Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянства скорости вращения или ее широкой регулировки.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:
- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.
РАБОТА 2 ИССЛЕДОВАНИЕ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ПАРАЛЛЕЛЬНЫМ ВОЗБУЖДЕНИЕМ
- Виктор Галахов 4 лет назад Просмотров:
1 РАБОТА 2 ИССЛЕДОВАНИЕ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ПАРАЛЛЕЛЬНЫМ ВОЗБУЖДЕНИЕМ Оглавление 1. Цель работы Программа работы Основы теории двигателя. 4. Экспериментальное исследование Пуск и реверс двигателя Рабочие характеристики Скоростная (электромеханическая) характеристика Регулировочная характеристика (частота вращения n = const) Регулировочная характеристика (момент M = const) 5 5. Определение к.п.д. двигателя по методу отдельных потерь Содержание отчета Контрольные вопросы Рис Схема лабораторной установки для исследования двигателя с параллельным возбуждением.. 8 Рис Передняя (приборная) панель стенда Двигатель постоянного тока (ФОТО).. 9 Рис Общий вид стенда Двигатель постоянного тока с исследуемыми агрегатами (ФОТО)
2 1. Цель работы Ознакомиться с устройством и принципом действия двигателя с параллельным возбуждением, научится пускать двигатель и изменять направление вращения, оценить влияние нагрузки на характеристики двигателя, познакомиться со способами регулирования частоты вращения и структурой потерь мощности. 2. Программа работы 2.1. Познакомиться с устройством двигателя постоянного тока (ДПТ) Собрать на лабораторном стенде схему двигателя, осуществить пуск двигателя, изменить направление вращения Определить опытным путем номинальный ток возбуждения I вn двигателя, снять и построить рабочие характеристики двигателя P 1, M, I a, n, η = f(p 2 ) при I в = I вn и U = U N = const Снять и построить скоростную (электромеханическую) характеристику двигателя n = f(i a ): а) при I в = I вn и U = U N = const, б) при I в = 0,5I вn и U = U N = const, 2.5. Снять и построить регулировочную характеристику двигателя при постоянной частоте вращения I в = f(m) при n = const и U = U N = const Снять и построить регулировочную характеристику двигателя при постоянном моменте на валу n = f(u) при M c = const и I в = I вn = const Рассчитать коэффициент полезного действия двигателя для заданного значения тока якоря. 2
3 3. Основы теории двигателя 4. Экспериментальное исследование Работа выполняется на установке, которая состоит из исследуемого двигателя М1 и тормозного устройства М2 (рис.2.1.). В качестве тормозного устройства используется двигатель постоянного тока параллельного возбуждения, работающий в режиме электромагнитного тормоза. Величина тормозного момента регулируется реостатом (на рис. 2.1 реостат обзначен символом RR нг ), включенным последовательно с якорем и определяется из выражения: M т = 1,285I a.т, Н м, (2.1) где I a.т ток в обмотке якоря электромагнитного тормоза (амперметр РА3). Перед началом работы необходимо записать паспортные данные исследуемого двигателя М1 и электромагнитного тормоза М Пуск и реверс двигателя Собирают схему испытаний (рис.2.1), пускают двигатель М1 и отмечают направление вращения якоря. Останавливают двигатель и изменяют направление вращения. Перед испытаниями двигателя направление вращения его должно соответствовать указанному стрелкой на подшипниковом щите Рабочие характеристики Рассчитывают номинальный момент двигателя М1 по формуле M N = P 2N /Ω N = 1000 /148,7 = 6,725 Н м, (2.2) где P 2N = 1000 Вт — номинальная мощность двигателя (на валу); Ω N — номинальная угловая скорость вращения якоря двигателя, которая связана с номинальной частотой вращения якоря n N = 1420 об/мин соотношеним Ω N = n N 2π/60 =1420 2π/60 =148,7 рад/с. (2.3) Пользуясь выражением (2.1) определяют величину тока тормозного устройства I a.т соответствующего номинальному моменту I a.т = M N /1,285 = 6,725/1,285 = 5,23 A. Пускают двигатель М1 и, после разбега, реостатом RR нг в цепи якоря тормозного двигателя М2 устанавливают номинальный момент на валу двигателя. Реостатом в цепи возбуждения испытуемого двигателя RR в устанавливают номинальную частоту вращения якоря n N =1420 об/мин. Соответствующий этому режиму ток возбуждения I вn является номинальным. Постепенно уменьшая величину тормозного момента до нуля (холостой ход) 3
4 снимают рабочие характеристики. Полученные данные записывают в табл Напряжение на зажимах обмотки якоря U N = 110 В в процессе опыта поддерживается неизменным реостатом RR р.д. Номинальное значение тока возбуждения I вn поддерживается реостатом RR в. Измерение Расчет Таблица 2.1 I a I в = I вn n I a.т Ω M P 1 P 2 η A A об/мин A рад/c Н м Вт Вт % Угловую скорость Ω вращения якоря определяют по соотношению Ω = n 2π/60. Значения подводимой к двигателю электрической мощности P 1, мощности на валу P 2 и к.п.д. η рассчитывают по формулам: P 1 = U N (I a + I в ); P 2 = M Ω; η = 100 P 2 /P 1. Метод определения к.п.д. по отношению полезной мощности P 2 к подводимой мощности P 1 называется методом непосредственного определения. На практике имеет широкое распространение определение к.п.д. по методу отдельных потерь (см. разд. 5). По полученным данным строят рабочие характеристики двигателя P 1, M, I a, n, η = f(p 2 ) при I в = I вn и U = U N = const Скоростная (электромеханическая) характеристика Зависимость n = f(i a ) при I в = I вn и U = U N = const устанавливается по данным табл. 2.1 и приводится в табл Для получения характеристики при I в = 0,5I вn реостатом RR в в цепи возбуждения двигателя устанавливают соответствующее значения тока. Регулируя нагрузку на валу двигателя тормозным устройством снимают зависимость n = f(i a ). В процессе опыта величина тока якоря не должна превысить значения I аn = 12,2 A. Таблица 2.2 I а n A об/ мин I в = I вn I в = 0,5I вn 4.4. Регулировочная характеристика (частота вращения n = const) Для получения регулировочной характеристики I в = f(m) при U = const и n = const на холостом ходу, регулируя ток I в реостатом RR в, устанавливают 4
5 заданную преподавателем частоту вращения n. Тормозным устройством увеличивают момент двигателя и одновременно с этим регулируют ток возбуждения I в таким образом, чтобы частота вращения оставалась постоянной. Полученные данные заносят в табл. 2.3 и по ним строят графическую зависимость I в = f(m). Измерение Расчет Таблица 2.3 n = const I в I а I a.т М I в об/мин А А А Н м А В табл. 2.3 I в = I в.х — I в, где I в.х ток возбуждения при отсутствии нагрузки на валу исследуемого двигателя, то есть при I a.т = 0. Значение момента М рассчитывают пользуясь выражением (2.1). По данным опыта строят графическую зависимость I в = f(m). В процессе опыта необходимо следить, чтобы ток якоря не превысил номинального значения I а I аn = 12, 2 A Регулировочная характеристика (момент M = const) Для получения регулировочной характеристики n = f(u) при M c = const и I в = I вn устанавливают на валу двигателя тормозной момент 0,75 M N (I a.т = 0,75 M N /1,285 = 0,75 6,725/1,285 3,9 A). Постепенно снижают регулировочным реостатом RR р.д напряжение на якоре двигателя ступенями по 10 В, одновременно с этим сохраняя постоянство тормозного момента. Опыт проводят до тех пор, пока удается поддержать постоянным тормозной момент, то есть I a.т 3,9 А. Данные опыта заносят в табл Таблица 2.4 Измерение Расчет U n I в =const I а I a.т =const М P 2 B об/мин А А А Н м Вт 5. Определение к.п.д. двигателя по методу отдельных потерь Метод отдельных потерь широко используется на практике. Предлагается определить значение к. п. д. двигателя по методу отдельных потерь для одного значения тока якоря I а примерно равного номинальному значению, I аn = 12,2 А. Это значение тока якоря I а берется из табл Рассчитанное по методу отдельных потерь значение к.п.д. следует сравнить со значением к. п. д., найденным методом непосредственного определения при снятии рабочих характеристик (см. табл. 2.1). 5
6 Согласно методу отдельных потерь определяют: потери на возбуждение; потери магнитные и механические; электрические потери в обмотках, обтекаемых током якоря; электрические потери в щетках и добавочные потери. Коэффициент полезного действия по методу отдельных потерь рассчитывают по формуле: η = 100(1- Σp/P 1 ), (2.4) где Σр сумма отдельных потерь мощности, которые в двигателе преобразуются в тепло. Сумма потерь Σp = p в + p мг + p мх + p эл.об + p эл.щ + p д, (2.5) где p в электрические потери в обмотке возбуждения; p мг магнитные потери в сердечнике якоря; p мх механические потери на трение; p эл.об электрические потери в обмотке якоря, обмотке добавочных полюсов и др.; p эл.щ электрические потери в щетках; p д добавочные потери. Величина мощности P 1, подводимой к двигателю, P 1 = U N (I a + I в ). Электрические потери в обмотке возбуждения p в = U N I в. Магнитные и механические потери: 2 pмг + pмх = U N I a. I a.х R, х a(75) где I a.х ток в обмотке якоря двигателя при холостом ходе (значение тока берется из табл. 2.1 при I a.т = 0 А); R a(75) сопротивление цепи обмотки якоря при температуре 75 С (без учета сопротивления щеточного контакта), 1 R a(75) 1,2R a. Электрические потери в обмотках якорной цепи p 2 эл.об = I a Ra(75). Электрические потери в щетках p эл.щ 2 U щ I а = 2 (0,3 1) I а. Добавочные потери p д 0,01U N I a. К.п.д. определяют по формуле (2.4) и результаты расчета помещают в табл. 2.5 Определение к.п.д. по методу непосредственного определения (данные табл. 2.1) отдельных потерь то же — Таблица 2.5 I а P 1 P 2 p в p мг + p мх p эл.об p эл.щ p д Σp η А Вт Вт Вт Вт Вт Вт Вт Вт % сопротивление обмотки якоря Ra = 1,1 Ом; сопротивление параллельной обмотки возбуждения R в = 210 Ом 6
7 6. Содержание отчета Отчет должен содержать программу работы, паспортные данные исследуемого двигателя и тормозного устройства, схему испытаний, таблицы с результатами измерений и расчетов, графические зависимости и расчет коэффициента полезного действия по методу отдельных потерь для одного значения тока якоря. 7. Контрольные вопросы 1. Из каких элементов состоит магнитная система двигателя? 2. В каком соотношении находятся токи якоря и возбуждения двигателя? 3. Как пустить в ход двигатель параллельного возбуждения? 4. Почему не изменится направление вращения, если изменить полярность питающего напряжения? 5. Почему при увеличении нагрузки на валу увеличивается потребляемый якорем двигателя ток и уменьшается частота вращения? 6. Почему меняется наклон скоростных (электромеханических) характеристик при изменении тока возбуждения? 7. Какие Вы знаете способы регулирования частоты вращения двигателя? 8. Как будут меняться ток якоря и частота вращения двигателя, если менять величину сопротивления в цепи возбуждения при постоянстве тормозного момента? 9. Как будут изменяться ток якоря и частота вращения двигателя, если менять величину сопротивления в цепи якоря при постоянстве тормозного момента? 10. Как будут изменяться ток якоря и частота вращения при постоянстве тормозного момента, если изменить положение щеток? 11. Назовите потери мощности в двигателе. Какие потери зависят от нагрузки на валу, какие не зависят? 12. Где используются двигатели постоянного тока параллельного возбуждения? 7
8 8 Рис Схема лабораторной установки для исследования двигателя с параллельным возбуждением
9 9 Рис Передняя (приборная) панель стенда Двигатель постоянного тока
10 10 Рис Общий вид стенда Двигатель постоянного тока с исследуемыми агрегатами
Достоинства и недостатки
Достоинства:
- простота устройства и управления;
- практически линейные механическая и регулировочная характеристики двигателя;
- легко регулировать частоту вращения;
- хорошие пусковые свойства (большой пусковой момент);
- компактнее других двигателей (если использовать сильные постоянные магниты в статоре);
- так как ДПТ являются обратимыми машинами, появляется возможность использования их как в двигательном, так и в генераторном режимах.
Недостатки :
- дороговизна изготовления;
- необходимость профилактического обслуживания коллекторно-щёточных узлов;
- ограниченный срок службы из-за износа коллектора.
(Последние два недостатка на современном этапе развития ДПТ почти не ощутимы).
Классификация двигателей.Свойства двигателей постоянного тока как генераторов в основном определяются способом питания обмотки возбуждения. В связи с этим различают двигатели с параллельным, независимым, последовательным и смешанным возбуждением. Схемы включения двигателей отличаются от схем включения соответствующих генераторов только наличием пускового реостата, который вводится для ограничения тока при пуске.
Обратимость электрической машины.Машина постоянного тока с независимым или параллельным возбуждением, подключенная к сети с постоянным напряжением, может работать как в генераторном, так и в двигательном режиме и переходить из одного режима работы в другой.
Для контура «обмотка якоря — сеть», согласно второму закону Кирхгофа,
E — U = Iа ΣRа ,
| Iа = (E — U)/ΣRа . |
Если Е > U, то ток Iа совпадает по направлению с ЭДС Е, и машина работает в генераторном режиме (рис. 8.58, а). При этом электромагнитный момент М противоположен направлению вращения п, т. е. является тормозным. Уравнение (8.79) для генераторного режима имеет вид
U = E — Iа ΣRа .
| U = E + Iа ΣRа, |
если за положительное направление тока Iа для двигательного режима принять его направление, встречное с ЭДС Е.
Таким образом, генераторы с независимым и параллельным возбуждением, подключенные к сети с напряжением U, автоматически переходят в двигательный режим, если их ЭДС Е меньше напряжения сети U. Эти двигатели автоматически переходят в генераторный режим, когда их ЭДС Е больше U. (8.83) (8.84)
При работе машины постоянного тока в двигательном режиме ЭДС Е и вращающий момент М определяются теми же формулами, что и в генераторном режиме:
| Е = сеФп; |
| М = сМФIа , |
но момент имеет противоположное направление. Из (8.83) и (8.82) можно получить формулу для определения частоты вращения
| п = Е/(се Ф) = (U — Iа ΣRа )/(се Ф). |
Двигатель с параллельным возбуждением. В этом двигателе (рис. 8.59, а) обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат Rр.в., а в цепь якоря — пусковой реостат Rп . Характерной особенностью двигателя является то, что его ток возбуждения Iв не зависит от тока якоря Iа (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Следовательно, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. При этом условии согласно (8.84) и (8.85) получаем, что зависимости М = f(Ia ) и n = f(Ia) (моментная и скоростная характеристики) линейные (рис. 8.59,б). Следовательно, линейна и механическая характеристика двигателя n = f(M) (рис. 8.60, а).
Если в цепь якоря включен добавочный резистор или реостат Rп , то
п = [U — Iа(ΣRа + Rп )]/(сеФ) = п0 — Δn,
 | Рис. 8.59. Схема двигателя с параллельным возбуждением и его моментная и скоростная характеристики |
 |
| Рис. 8.60. Механические и рабочие характеристики двигателя с параллельным возбуждением |
где n0 = U/(сеФ) — частота вращения при холостом ходе; Δп = (ΣRа + Rп )Iа /(сеФ) — снижение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя.
Величина Δп , зависящая от суммы сопротивлений ΣRа + Rп , определяет наклон скоростной n = f(Ia) и механической n = f(M) характеристик к оси абсцисс. При отсутствии в цепи якоря добавочного сопротивления Rп указанные характеристики жесткие (естественные характеристики 1 на рис. 8.59,б и 8.60,а), так как падение напряжения Iа ΣRа в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3 — 5% от Uном. При включении добавочного реостата угол наклона этих характеристик возрастает, вследствие чего образуется семейство реостатных характеристик 2, 3, 4, соответствующих различным сопротивлениям реостата Rпl. Rп2 и Rп3. Чем больше сопротивление Rп , тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Реакция якоря, уменьшая несколько поток машины Ф при нагрузке, стремится придать естественной механической характеристике отрицательный угол наклона, при котором частота вращения n возрастает с увеличением момента М. Однако двигатель с такой характеристикой в большинстве электроприводов устойчиво работать не может. Поэтому современные двигатели большой и средней мощностей с параллельным возбуждением часто имеют небольшую последовательную обмотку возбуждения, которая придает механической характеристике необходимый наклон. МДС этой обмотки при токе Iном составляет около 10% от МДС параллельной обмотки.
Регулировочный реостат Rp.в позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. Как следует из (8.86), при этом изменяется и частота вращения n. В цепь обмотки возбуждения выключатели и предохранители не устанавливают, так как при разрыве этой цепи и небольшой нагрузке на валу частота вращения двигателя резко возрастает (двигатель идет в «разнос»). При этом сильно увеличивается ток якоря и может возникнуть круговой огонь.
Рабочие характеристики рассматриваемого двигателя (рис. 8.60,б) представляют собой зависимости потребляемой мощности Р1 тока Ia ≈ Iн частоты вращения n, момента М и КПД η от отдаваемой мощности Р2 на валу двигателя при U = const и Iв = const. Характеристики n = f(P2) и М = f(P2) являются линейными, а зависимости Р1 = f(P2), Ia = f(P2) и η = f(P2) имеют характер, общий для всех электрических машин. Иногда рабочие характеристики строят в зависимости от тока якоря Ia.
Если в двигателе обмотка якоря и обмотка возбуждения подключены к источникам питания с различными напряжениями, то его называют двигателем с независимым возбуждением. Такие двигатели применяют в электрических приводах, у которых питание обмотки якоря осуществляется от генератора или полупроводникового преобразователя. Механические и рабочие характеристики двигателя с независимым возбуждением аналогичны характеристикам двигателя с параллельным возбуждением, так как у них ток возбуждения Iв также не зависит от тока якоря Ia .
 |
| Рис. 8.61. Схема двигателя с последовательным возбуждением и его моментная и скоростная характеристики |
Двигатель с последовательным возбуждением. В этом двигателе (рис. 8.61, а) ток возбуждения Iв = Ia, поэтому магнитный поток Ф является некоторой функцией тока якоря Ia. Характер этой функции изменяется в зависимости от нагрузки двигателя. При Ia Iном ) можно считать, что Ф ≈ const. В соответствии с этим изменяются в зависимости n = f(Ia) и М = f(Ia).
При Ia Iном скоростная характеристика становится линейной, так как частота вращения
| n = | U — Ia ∑Ra | = | U | — | Ia ∑Ra | = C’1U — C’2Ia |
| ceФ | ceФ | ce Ф |
где С‘1 и С‘2 — постоянные.
Аналогично можно получить зависимость электромагнитного момента от тока якоря М = f(Ia). При Ia Iном моментная характеристика линейная, так как
М = сМФIa = C’3Iа,
где C’3 — постоянная. Механические характеристики n = f(М) (рис. 8.62, а) можно построить на основании зависимостей n = f(Ia) и М = f(Ia). При Ia Iном зависимость n = f(М) становится линейной.
 |
| Рис. 8.62. Механические и рабочие характеристики двигателя с последовательным возбуждением |
Включая в цепь якоря пусковые реостаты с сопротивлениями Rп1, Rп2 и Rп3 кроме естественной характеристики 1 можно получить семейство реостатных характеристик 2, 3 и 4, причем, чем больше Rп , тем ниже располагается характеристика.
Рабочие характеристики двигателя с последовательным возбуждением приведены на рис. 8.62, б. Зависимости n = f(Р2) М = f(Р2) являются нелинейными; зависимости P1 = f(Р2), Iа = f(Р2) и η = f(Р2) имеют примерно такой же характер, как и у двигателя с параллельным возбуждением.
Из рассмотрения рис. 8.62, а следует, что механические характеристики рассматриваемого двигателя (естественная и реостатные) являются мягкими и имеют гиперболический характер. При малых нагрузках частота вращения и резко возрастает и может превысить максимально допустимое значение (двигатель идет в «разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода или при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка составляет (0,2 ÷ 0,25) Iном ; только двигатели малой мощности (десятки ватт) используют для работы в устройствах, где возможен холостой ход. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты для включения недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют в различных электрических приводах, особенно там, где имеется изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.). Это объясняется тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением. При жесткой характеристике частота вращения п почти не зависит от момента М, поэтому мощность
Р2 = Мω = 2πnМ/60 = С5М,
где С5 — постоянная.
При мягкой характеристике двигателя с последовательным возбуждением частота вращения и обратно пропорциональна √М, вследствие чего
Р2 = Мω = 2πnМ/60 = С’5√М,
где С5 — постоянная.
Поэтому при изменении нагрузочного момента в широких пределах мощность Р2, а следовательно, мощность Р1 и ток Iа у двигателей с последовательным возбуждением изменяются в меньших пределах, чем у двигателей с параллельным возбуждением; кроме того, они лучше переносят перегрузки. Например, при заданной кратности перегрузки по моменту М/Мном = kм ток якоря в двигателе с параллельным возбуждением увеличивается в kм раз, а в двигателе с последовательным возбуждением — только в √kм раз. Поэтому двигатель с последовательным возбуждением развивает больший пусковой момент, так как при заданной кратности пускового тока Iп/Iном = ki пусковой момент его Мп = ki2Мном , а у двигателя с параллельным возбуждением Мп = kiМном .
Указанные преимущества двигателей с последовательным возбуждением наиболее четко проявляются в простых приводах, не имеющих систем автоматического управления. При наличии таких систем предпочтение всегда отдается двигателям с параллельным или независимым возбуждением, у. которых с помощью регуляторов тока возбуждения можно получить требуемую форму механической характеристики, например гиперболическую.
Двигатель со смешанным возбуждением. В этом двигателе (рис. 8.63, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной и последовательной. Поэтому его механические характеристики (рис. 8.63,б, кривые 3 и 4) располагаются между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения МДС параллельной и последовательной обмоток при
 | Рис. 8.63. Схема двигателя со смешанным возбуждением и его механические характеристики |
номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (при малой МДС последовательной обмотки) или к характеристике 2 (при малой МДС параллельной обмотки). Одним из достоинств двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, так как его частота вращения n0 имеет конечное значение
 studopedia.org — Студопедия.Орг — 2014-2021 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.006 с) .
studopedia.org — Студопедия.Орг — 2014-2021 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.006 с) .
