
Принцип действия и устройство электродвигателя
Принцип действия и устройство электродвигателя
Любой электрический двигатель предназначен для совершения механической работы за счет расхода приложенной к нему электроэнергии, которая преобразуется, как правило, во вращательное движение. Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
Внутри бытовых приборов электродвигатели работают в стиральных машинах, пылесосах, компьютерах, фенах, детских игрушках, часах и многих других устройствах.

Основные физические процессы и принцип действия
На движущиеся внутри магнитного поля электрические заряды, которые называют электрическим током, всегда действует механическая сила, стремящаяся отклонить их направление в плоскости, расположенной перпендикулярно ориентации магнитных силовых линий. Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
На картинке ниже показана металлическая рамка, по которой течет ток. Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.
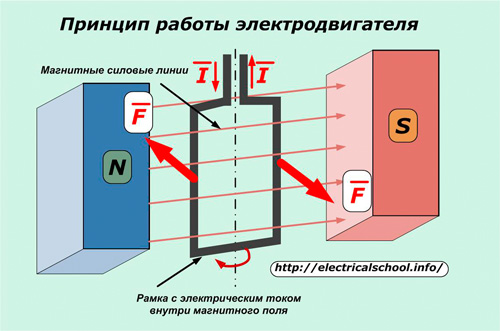
Это свойство взаимодействия электрической и магнитной энергии на основе создания электродвижущей силы в замкнутом токопроводящем контуре положено в работу любого электродвигателя. В его конструкцию входят:
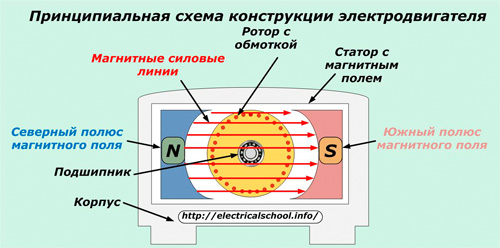
обмотка, по которой протекает электрический ток. Ее располагают на специальном сердечнике-якоре и закрепляют в подшипниках вращения для уменьшения противодействия сил трения. Эту конструкцию называют ротором;
статор, создающий магнитное поле, которое своими силовыми линиями пронизывает проходящие по виткам обмотки ротора электрические заряды;
корпус для размещения статора. Внутри корпуса сделаны специальные посадочные гнезда, внутри которых вмонтированы внешние обоймы подшипников ротора.
Упрощенно конструкцию наиболее простого электродвигателя можно представить картинкой следующего вида.
При вращении ротора создается крутящий момент, мощность которого зависит от общей конструкции устройства, величины приложенной электрической энергии, ее потерь при преобразованиях.
Величина максимально возможной мощности крутящего момента двигателя всегда меньше приложенной к нему электрической энергии. Она характеризуется величиной коэффициента полезного действия.
По виду протекающего по обмоткам тока их подразделяют на двигатели постоянного или переменного тока. Каждая из этих двух групп имеет большое количество модификаций, использующих различные технологические процессы.
Электродвигатели постоянного тока
У них магнитное поле статора создается стационарно закрепленными постоянными магнитами либо специальными электромагнитами с обмотками возбуждения. Обмотка якоря жестко вмонтирована в вал, который закреплен в подшипниках и может свободно вращаться вокруг собственной оси.
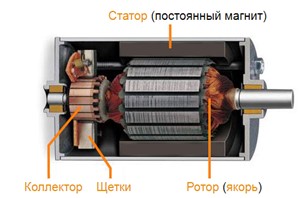
Принципиальное устройство такого двигателя показано на рисунке.
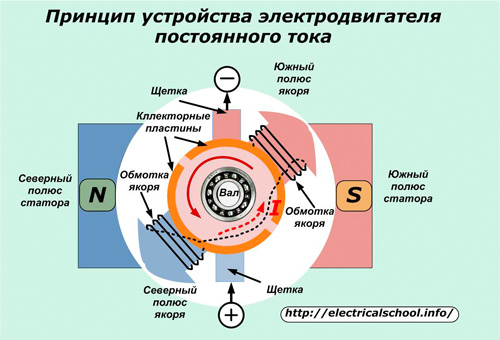
На сердечнике якоря из ферромагнитных материалов расположена обмотка, состоящая из двух последовательно соединенных частей, которые одним концом подключены к токопроводящим коллекторным пластинам, а другим скоммутированы между собой. Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
На нижнюю щетку рисунка подводится положительный потенциал постоянного источника тока, а на верхнюю — отрицательный. Направление протекающего по обмотке тока показано пунктирной красной стрелкой.
Ток вызывает в нижней левой части якоря магнитное поле северного полюса, а в правой верхней — южного (правило буравчика). Это приводит к отталкиванию полюсов ротора от одноименных стационарных и притяжению к разноименным полюсам на статоре. В результате приложенной силы возникает вращательное движение, направление которого указывает коричневая стрелка.
При дальнейшем вращении якоря по инерции полюса переходят на другие коллекторные пластины. Направление тока в них изменяется на противоположное. Ротор продолжает дальнейшее вращение.
Простая конструкция подобного коллекторного устройства приводит к большим потерям электрической энергии. Подобные двигатели работают в приборах простой конструкции или игрушках для детей.
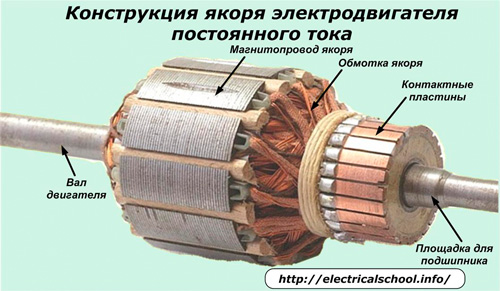
Электродвигатели постоянного тока, участвующие в производственном процессе, имеют более сложную конструкцию:
обмотка секционирована не на две, а на большее количество частей;
каждая секция обмотки смонтирована на своем полюсе;
коллекторное устройство выполнено определенным количеством контактных площадок по числу секций обмоток.
В результате этого создается плавное подключение каждого полюса через свои контактные пластины к щеткам и источнику тока, снижаются потери электроэнергии.
Устройство подобного якоря показано на картинке.
У электрических двигателей постоянного тока можно реверсировать направление вращения ротора. Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Электродвигатели переменного тока
Они отличаются от предыдущих конструкций тем, что электрический ток, протекающий в их обмотке, описывается по синусоидальному гармоническому закону, периодически изменяющему свое направление (знак). Для их питания напряжение подается от генераторов со знакопеременной величиной.
Статор таких двигателей выполняется магнитопроводом. Его делают из ферромагнитных пластин с пазами, в которые помещают витки обмотки с конфигурацией рамки (катушки).

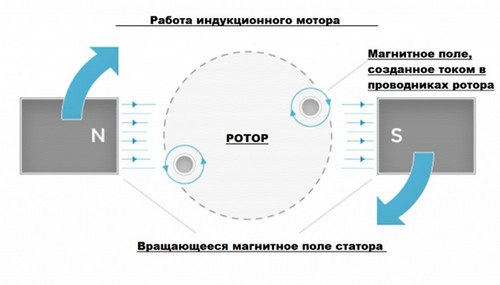
На картинке ниже показан принцип работы однофазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора.
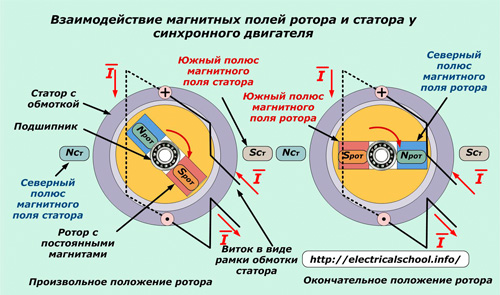
В пазах статорного магнитопровода по диаметрально противоположным концам размещены проводники обмотки, схематично показанные в виде рамки, по которой протекает переменный ток.
Рассмотрим случай для момента времени, соответствующего прохождению положительной части его полуволны.
В обоймах подшипника свободно вращается ротор с вмонтированным постоянным магнитом, у которого ярко выражены северный «N рот» и южный «S рот» полюса. При протекании положительной полуволны тока по обмотке статора в ней создается магнитное поле с полюсами «S ст» и «N ст».
Между магнитными полями ротора и статора возникают силы взаимодействия (одноименные полюса отталкиваются, а разноименные — притягиваются), которые стремятся повернуть якорь электродвигателя из произвольного положения в окончательное, когда осуществляется максимально близкое расположение противоположных полюсов относительно друг друга.
Если рассматривать этот же случай, но для момента времени, когда по рамочному проводнику протекает обратная — отрицательная полуволна тока, то вращение якоря будет происходить в противоположную сторону.
Для придания непрерывного движения ротору в статоре делают не одну обмотку-рамку, а определенное их количество с таким учетом, чтобы каждая их них питалась от отдельного источника тока.
Принцип работы трехфазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора показан на следующей картинке.
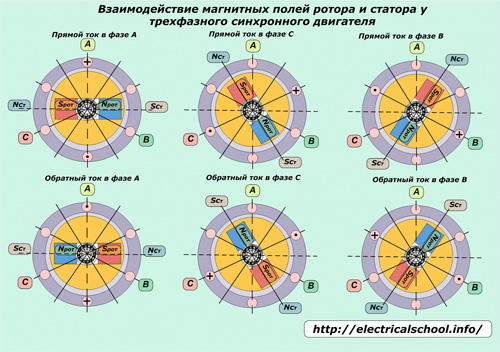
В этой конструкции внутри магнитопровода статора смонтированы три обмотки А, В и С, смещенные на углы 120 градусов между собой. Обмотка А выделена желтым цветом, В — зеленым, а С — красным. Каждая обмотка выполнена такими же рамками, как и в предыдущем случае.
На картинке для каждого случая ток проходит только по одной обмотке в прямом или обратном направлении, которое показано значками «+» и «-».
При прохождении положительной полуволны по фазе А в прямом направлении ось поля ротора занимает горизонтальное положение потому, что магнитные полюса статора формируются в этой плоскости и притягивают подвижный якорь. Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Когда положительная полуволна пойдет по фазе С, то якорь повернется на 60 градусов по ходу часовой стрелки. После подачи тока в фазу В произойдет аналогичный поворот якоря. Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
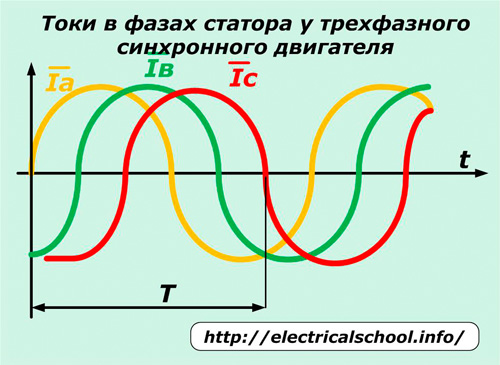
Если к каждой обмотке подвести сдвинутое по углу 120 градусов напряжение трехфазной сети, то в них будут циркулировать переменные токи, которые раскрутят якорь и создадут его синхронное вращение с подведенным электромагнитным полем.
Эта же механическая конструкция успешно применяется в трехфазном шаговом двигателе . Только в каждую обмотку с помощью управления специальным контроллером (драйвером шагового двигателя) подаются и снимаются импульсы постоянного тока по описанному выше алгоритму.
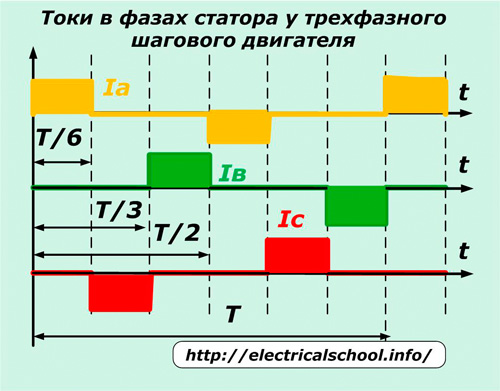
Их запуск начинает вращательное движение, а прекращение в определенный момент времени обеспечивает дозированный поворот вала и остановку на запрограммированный угол для выполнения определенных технологических операций.
В обеих описанных трехфазных системах возможно изменение направления вращения якоря. Для этого надо просто поменять чередование фаз «А»-«В»-«С» на другое, например, «А»-«С»-«В».
Скорость вращения ротора регулируется продолжительностью периода Т. Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
Эти конструкции двигателей имеют такой же статорный магнитопровод с обмотками, как и в ранее рассмотренных однофазных и трехфазных моделях. Они получили свое название из-за несинхронного вращения электромагнитных полей якоря и статора. Сделано это за счет усовершенствования конфигурации ротора.
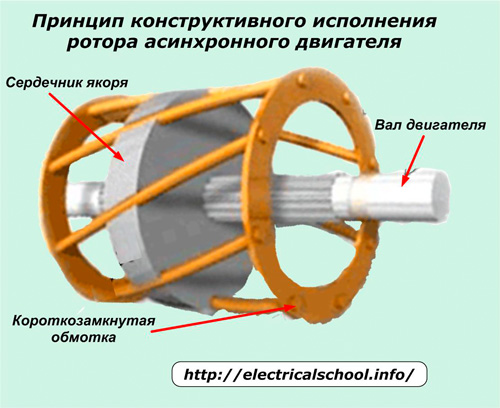
Его сердечник набран из пластин электротехнических марок стали с пазами. В них вмонтированы алюминиевые либо медные тоководы, которые по концам якоря замкнуты токопроводящими кольцами.
Когда к обмоткам статора подводится напряжение, то в обмотке ротора электродвижущей силой наводится электрический ток и создается магнитное поле якоря. При взаимодействии этих электромагнитных полей начинается вращение вала двигателя.
У этой конструкции движение ротора возможно только после того, как возникло вращающееся электромагнитное поле в статоре и оно продолжается в несинхронном режиме работы с ним.
Асинхронные двигатели проще в конструктивном исполнении. Поэтому они дешевле и массово применяются в промышленных установках и бытовой домашней технике.

Взрывозащищенный электродвигатель ABB
Многие рабочие органы промышленных механизмов выполняют возвратно-поступательное или поступательное движение в одной плоскости, необходимое для работы металлообрабатывающих станков, транспортных средств, ударов молота при забивании свай …
Перемещение такого рабочего органа с помощью редукторов, шариковинтовых, ременных передач и подобных механических устройств от вращательного электродвигателя усложняет конструкцию. Современное техническое решение этой проблемы — работа линейного электрического двигателя.
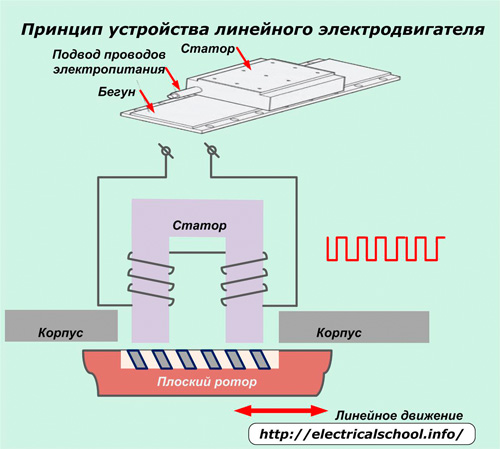
У него статор и ротор вытянуты в виде полос, а не свернуты кольцами, как у вращательных электродвигателей.
Принцип работы заключается в придании возвратно-поступательного линейного перемещения бегуну-ротору за счет передачи электромагнитной энергии от неподвижного статора с незамкнутым магнитопроводом определенной длины. Внутри него поочередным включением тока создается бегущее магнитное поле.
Оно воздействует на обмотку якоря с коллектором. Возникающие в таком двигателе силы перемещают ротор только в линейном направлении по направляющим элементам.
Линейные двигатели конструируются для работы на постоянном или переменном токе, могут работать в синхронном либо асинхронном режиме.
Недостатками линейных двигателей являются:
низкие энергетические показатели.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Устройство и принцип работы двигателя на постоянных магнитах
Двигатели на протяжении многих лет используются для преобразования электрической энергии в механическую различного типа. Эта особенность определяет столь высокую его популярность: обрабатывающие станки, конвейеры, некоторые бытовые приборы – электродвигатели различного типа и мощности, габаритных размеров используются повсеместно.

- Устройство ↓
- Принцип работы ↓
- Виды ↓
- Преимущества и недостатки ↓
- Как сделать своими руками? ↓
- Рекомендации ↓
Основные показатели работы определяют то, какой тип конструкции имеет двигатель. Существует несколько разновидностей, некоторые пользуются популярностью, другие не оправдывают сложность подключения, высокую стоимость.
Двигатель на постоянных магнитах используют реже, чем асинхронный вариант исполнения. Для того, чтобы оценить возможности этого варианта исполнения, следует рассмотреть особенности конструкции, эксплуатационные качества и многое другое.
Устройство

Электродвигатель на постоянных магнитах не сильно отличается по виду конструкции.
При этом, можно выделить следующие основные элементы:
- Снаружи используется электротехническая сталь, из которой изготавливается сердечник статора.
- Затем идет стержневая обмотка.
- Ступица ротора и за ней специальная пластина.
- Затем, изготовленные из электротехнической стали, секции редечника ротора.
- Постоянные магниты являются частью ротора.
- Конструкцию завершает опорный подшипник.
Как любой вращающийся электродвигатель, рассматриваемый вариант исполнения состоит из неподвижного статора и подвижного ротора, которые при подаче электроэнергии взаимодействую между собой. Отличие рассматриваемого варианта исполнения можно назвать наличие ротора, в конструкцию которого включены магниты постоянного типа.
Принцип работы

Принцип работы рассматриваемого варианта исполнения основан на создании центробежной силы за счет магнитного поля, которое создается при помощи обмотки. Стоит отметить, что работа синхронного электродвигателя схожа с работой трехфазного асинхронного двигателя.
К основным моментам можно отнести:
- Создаваемое магнитное поле ротора вступает во взаимодействие с подаваемым током на обмотку статора.
- Закон Ампера определяет создание крутящего момента, который и заставляет выходной вал вращаться вместе с ротором.
- Магнитное поле создается установленными магнитами.
- Синхронная скорость вращения ротора с создаваемым полем статора определяет сцепление полюса магнитного поля статора с ротором. По этой причине, рассматриваемый двигатель нельзя использовать в трехфазной сети напрямую.
В данном случае, нужно в обязательном порядке устанавливать специальный блок управления.
 В зависимости от особенностей конструкции, существует несколько типов синхронных двигателей. При этом, они обладают разными эксплуатационными качествами.
В зависимости от особенностей конструкции, существует несколько типов синхронных двигателей. При этом, они обладают разными эксплуатационными качествами.
По типу установки ротора, можно выделить следующие типы конструкции:
- С внутренней установкой – наиболее распространенный тип расположения.
- С внешней установкой или электродвигатель обращенного типа.
Постоянные магниты включены в конструкцию ротора. Их изготавливают из материала с высокой коэрцитивной силой.
Эта особенность определяет наличие следующих конструкций ротора:
- Со слабо выраженным магнитным полюсом.
- С ярко выраженным полюсом.
Кроме этого, конструкция ротора может быть следующего типа:
- Поверхностная установка магнитов.
- Встроенное расположение магнитов.
Кроме ротора, также следует обратить внимание и на статор.
По типу конструкции статора, можно разделить электродвигатели на следующие категории:
- Распределенная обмотка.
- Сосредоточенная обмотка.
По форме обратной обмотке, можно провести нижеприведенную классификацию:
- Синусоида.
- Трапецеидальная.
Подобная классификация оказывает влияние на работу электродвигателя.
Преимущества и недостатки
Рассматриваемый вариант исполнения имеет следующие достоинства:
- Оптимальный режим работы можно получить при воздействии реактивной энергии, что возможно при автоматической регулировке тока. Эта особенность обуславливает возможность работы электродвигателя без потребления и отдачи реактивной энергии в сеть. В отличие от асинхронного двигателя, синхронный имеет небольшие габаритные размеры при той же мощности, но при этом КПД значительно выше.
- Колебания напряжения в сети в меньшей степени воздействую на синхронный двигатель. Максимальный момент пропорционален напряжению сети.
- Высокая перегрузочная способность. Путем повышения тока возбуждения, можно провести значительное повышение перегрузочной способности. Это происходит на момент резкого и кратковременного возникновения дополнительной нагрузки на выходном валу.
- Скорость вращения выходного вала остается неизменной при любой нагрузке, если она не превышает показатель перегрузочной способности.
К недостаткам рассматриваемой конструкции можно отнести более сложную конструкцию и вследствие этого более высокую стоимость, чем у асинхронных двигателей. Однако в некоторых случаях, обойтись без данного типа электродвигателя невозможно.
Как сделать своими руками?

Провести создание электродвигателя своими руками можно только при наличии знаний в области электротехнике и наличия определенного опыта. Конструкция синхронного варианта исполнения должна быть высокоточной для исключения возникновения потерь и правильности работы системы.
 Зная то, как должна выглядеть конструкция, проводим следующую работу:
Зная то, как должна выглядеть конструкция, проводим следующую работу:
- Создается или подбирается выходной вал. Он не должен иметь отклонений или других дефектов. В противном случае, возникающая нагрузка может привести к искривлению вала.
- Наибольшей популярностью пользуются конструкции, когда обмотка находится снаружи. На посадочное место вала устанавливается статор, который имеет постоянные магниты. На валу должно быть предусмотрено место для шпонки для предотвращения прокручивания вала при возникновении серьезной нагрузки.
- Ротор представлен сердечником с обмоткой. Создать самостоятельно ротор достаточно сложно. Как правило, он неподвижен, крепится к корпусу.
- Механической связи между статором и ротором нет, так как в противном случае, при вращении будет создавать дополнительная нагрузка.
- Вал, на котором крепится статор, также имеет посадочные места для подшипников. В корпусе имеется посадочные места для подшипников.
Электродвигатели имеют сложную конструкцию, питание от сети 220 Вольт обуславливает соблюдение определенных норм при их создании. Именно поэтому, для того, чтобы быть уверенным в надежной работе подобного механизма, следует покупать варианты исполнения, созданные на заводах по выпуску подобного оборудования.
В научных целях, к примеру, в лаборатории для проведения испытаний по работе магнитного поля часто создают собственные двигатели. Однако они имеют небольшую мощность, питаются от незначительно напряжения и не могут быть применены в производстве.
Рекомендации

Выбор рассматриваемого электродвигателя следует проводить с учетом следующих особенностей:
- Мощность – основной показатель, который влияет на срок службы. При возникновении нагрузки, которая превосходит возможности электродвигателя, он начинает перегреваться. При сильной нагрузке, возможно искривление вала и нарушение целостности других компонентов системы. Поэтому следует помнить о том, что диаметр вала и другие показатели выбираются в зависимости от мощности двигателя.
- Наличие системы охлаждения. Обычно особого внимания на то, как проводится охлаждение, никто не уделяет. Однако при постоянной работе оборудования, к примеру под солнцем, следует задуматься о том, что модель должна быть предназначена для продолжительной работы под нагрузкой при тяжелых условиях.
- Целостность корпуса и его вид,год выпуска – основные моменты, на которые уделяют внимание при покупке двигателя бывшего употребления. Если имеются дефекты корпуса, велика вероятность того, что конструкция имеет повреждения и внутри. Также, не стоит забывать о том, что подобное оборудование с годами теряет свой КПД.
- Особое внимание нужно уделятькорпусу, так как в некоторых случаях можно провести крепление только в определенном положении. Самостоятельно создать посадочные отверстия, приварить уши для крепления практически невозможно, так как нарушение целостности корпуса не допускается.
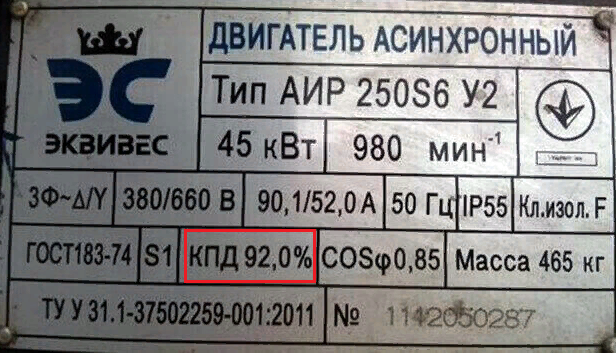
- Вся информация об электродвигателе находится на пластине, которая прикрепляется к корпусу. В некоторых случаях, есть только маркировка, по расшифровке которой можно узнать основные показатели работы.
В заключение отметим, что многие двигатели, которые были произведены несколько десятилетий назад, зачастую проходили восстановительные работы. От качества проведенной восстановительной работы зависят показатели электродвигателя.
Что движет техникой?
В процессе своей работы менеджеры салонов «Технолюкс» постоянно что-то рассказывают, показывают и объясняют. Каждый наш клиент, выходя из магазина, обладает большим багажом знаний по сравнению с тем, когда он в него заходил. Задача наших консультантов — не банально нагрузить покупателя новой информацией, подобно преподавателю в институте, а структурировать ту информацию, которая у него уже есть, и очистить ее от лишней, ненужной, а, порой, и просто ошибочной чепухи, которой напичкали его некоторые «недоблогеры» на YouTube или нерадивые продавцы в известных гипермаркетах. И одной из частых проблем, с которыми приходится сталкиваться, является неверная терминология в вопросах двигателей. Практика показывает, что у подавляющего большинства покупателей в голове натуральная каша из различных умных слов, которые так любят маркетологи, но при этом зачастую эти слова даже не находятся в одном смысловом поле.
Сегодня мы решили немного раскрыть эту тему. Сразу предупреждаем, что если вы, уважаемый читатель, — электротехник или в университете сдали экзамен по электромеханике на «отлично», то много из этой статьи вам покажется неточным или ненаучным. Но наша цель — не подготовить читателя к зачету, а постараться простыми словами рассказать про различные виды двигателей, чтобы он имел представление о том, что в них бывает разного, и как это разное может быть ему полезно.
В первую очередь определим, что же такое электродвигатель? Это устройство, предназначенное для преобразования электрической энергии в механическую. По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение. И в этой заметке под термином «двигатель» мы будем понимать именно его.
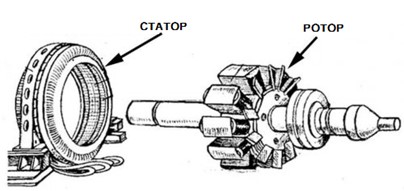
Теперь опишем две основные части любого двигателя. Это ротор и статор. Частей, конечно же, больше, но основными и неизменными являются лишь эти две. Та часть, которая вращается, называется ротором (от лат. rota — «колесо», roto — «вращаюсь»). А та часть, которая не вращается, то есть стоит на месте, называется статором (от лат. sto — стою). У большей части электродвигателей ротор располагается внутри статора. Двигатели, у которых ротор находится снаружи называются электродвигателями обращенного типа.
Статоры электродвигателей переменного тока (сначала поговорим о них) имеют схожий принцип устройства. В специальные пазы (осевые прорези) уложены токонесущие проводники из меди или алюминия, называемые обмоткой. Функцией статора является создание вращающегося магнитного поля. Вращающееся магнитное поле необходимо для того, чтобы увлекать за своим вращением ротор. При этом ротор может быть либо постоянным магнитом, либо электромагнитом с собственной обмоткой возбуждения, либо набором проводников, не подключенных к внешней электроцепи (также из-за схожести называемой «беличьей клеткой»).
Если ротор является магнитом, либо имеет обмотку, которая превращает его в электромагнит, то он создает постоянное магнитное поле. Поскольку другое магнитное поле, создаваемое статором, вращается, магнитное поле ротора следует за ним: северный полюс поля ротора притягивается к южному полюсу поля статора. Скорость вращения ротора будет равна скорости вращения магнитного поля статора. Равна — значит, синхронна. Поэтому такие двигатели называются синхронными. Если же скорость вращения ротора отличается от скорости вращения магнитного поля статора, то она, можно сказать, с ним не синхронна, или же асинхронна. Такие двигатели, как нетрудно догадаться, называют асинхронными.
В каком случае скорость ротора не будет равна скорости вращения поля статора? В том случае, когда ротор не имеет собственного магнитного поля. Такой ротор состоит из набора токопроводящих пластин, не соединенных ни между собой, ни с внешней цепью. Вращающееся магнитное поле статора создает ЭДС (электродвижущую силу), которая при пересечении проводников ротора наводит в них электрический ток. «Наведение» по латыни звучит как «inductio», поэтому такие асинхронные двигатели еще называют индукционными. В результате этого наведения возникает крутящий момент и ротор начинает вращаться. Его скорость вращения всегда будет ниже скорости вращения магнитного поля статора, иначе силовые линии этого поля не будут пересекать проводники ротора и не будут создавать там ток, что не позволит ему вращаться.
Таким образом мы пришли к первому разделению типов двигателей по скорости вращения их ротора: синхронные и асинхронные. У каждого из этих типов, конечно же, есть преимущества. Синхронные модели имеют большую надежность и более высокий КПД, просты в обслуживании, и частота их вращения не зависит от прилагаемой нагрузки (до определенного предела). К минусам синхронных моторов можно отнести сложность запуска двигателя — низкий пусковой момент не позволяет быстро выйти на рабочие обороты и зачастую требует наличия дополнительного устройства, «раскручивающего» двигатель. А особенностью синхронных электродвигателей является постоянная частота вращения — ее весьма трудно менять. Поэтому в тех приборах, где частоту нужно регулировать (в случае с бытовой техникой это, например, стиральные машины и вытяжки) используются асинхронные двигатели. Они также имеют свои плюсы: низкое потребление энергии, простота конструкции, эксплуатация в бытовых приборах с использованием однофазного подключения. Главный же их минус заключается в больших тепловых потерях и сложности регулировки.
Для того, чтобы в статоре двигателя магнитное поле вращалось, двигатель должен быть подключен к переменному току. По счастью в нашей сети ток именно такой. Но работа синхронного электродвигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора, поэтому ротору необходим источник постоянного тока, который подводится к нему через специальные контактные кольца на валу посредством специальных щеток, сделанных, как правило, из графита. Но ведь в сети переменный ток, так как же быть?
Для решения этого вопроса конструкция двигателя должна предполагать наличие генератора постоянного тока. Устройство, преобразующее переменный ток в постоянный, называется выпрямителем. Собственно, такой выпрямитель есть в каждом известном нам устройстве, потому что все они работают от постоянного тока. Да-да! Преимуществом переменного тока является то, что его возможно передавать на большие расстояния с гораздо меньшими потерями «по пути», в отличие от постоянного. Однако, что касается КДП, то постоянный ток значительно лучше. Поэтому подавляющее большинство электроприборов имеют в своей конструкции выпрямители.
Вернемся к асинхронному двигателю. Его основной особенностью является возможность плавной регулировки скорости вращения ротора. Скорость вращения ротора напрямую связана со скоростью вращения магнитного поля статора. Изменить скорость этого поля возможно посредством увеличения частоты тока и его напряжения. Устройство, которое способно выдавать выходное переменное напряжение заданной частоты называется тиристорным преобразователем частоты. Однако нам оно больше известно под словом «инвертор», что, согласитесь, звучит гораздо красивее, нежели буквосочетание «ТПЧ». Поэтому от производителей и продавцов нередко можно услышать словосочетание «инверторный двигатель», что, по сути, является красивым названием для любого асинхронного двигателя переменного тока с регулируемой частотой вращения ротора.
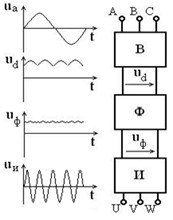
На рисунке изображена условная схема работы тиристора. В выпрямителе (В) входное переменное напряжение выпрямляется и поступает в фильтр (Ф), где оно сглаживается, фильтруется, после чего опять преобразуется инвертором (И) в переменное, которое может регулироваться по таким параметрам, как амплитуда и частота. Именно то, что тиристорные преобразователи частоты имеют высокий КПД (до 98%), способны успешно справляться с большими напряжениями и токами, а также выдерживать при этом импульсные воздействия и довольно продолжительную нагрузку, является их основным достоинством.
Кроме всего выше перечисленного на просторах сети или в магазинах можно услышать словосочетание «коллекторный двигатель» или «щеточный двигатель». Чаще всего такие фразы звучат в негативно-презрительной тональности. Что же это за двигатель, и чем он хуже двигателя бесколлекторного?
Коллекторный электродвигатель — это двигатель, у которого хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором. Коллектор — часть двигателя, контактирующая со щетками. С помощью щеток и коллектора электрический ток распределяется по катушкам обмотки якоря. Якорь — часть коллекторной машины постоянного тока или синхронной машины, в которой индуктируется электродвижущая сила и протекает ток нагрузки. В качестве якоря может выступать как ротор так и статор. В свою очередь щетки — это часть электрической цепи, по которой от источника питания электрический ток передается к якорю. Щетки изготавливаются из графита или других материалов. Двигатель постоянного тока содержит одну пару щеток или более. Одна из двух щеток соединяется с положительным, а другая — с отрицательным выводом источника питания. Собственно, наличие коллекторного узла и отличает двигатель постоянного тока от двигателя переменного тока. И этот же момент является причиной меньшей надежности коллекторных двигателей — щетки могут быстро износиться. Помимо этого, они издают дополнительный шум, а КПД щеточного двигателя всегда ниже, чем КДП двигателя асинхронного. И, хотя производство коллекторного двигателя дешевле, он обладает лучшим откликом на изменение напряжения (а, значит, вполне подходит для плавной регулировки скорости вращения) и на низких оборотах имеет высокий вращающий момент, асинхронные двигатели постепенно вытесняют коллекторные с рынка бытовых приборов ввиду большей надежности, меньших затрат энергии (за счет более высокого КПД: 80-90% против 55-65% у коллекторных двигателей) и меньшего шума.
Коллекторные двигатели всегда являются двигателями постоянного тока. Но не все двигатели постоянного тока являются коллекторными. Существуют так называемые моторы BLDC, что в расшифровке значит Brushless DC electric motor — бесщеточный двигатель постоянного тока. Еще их называют вентильными двигателями. Щетки в таком моторе отсутствуют. Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении. Такие двигатели более дорогостоящие, но позволяют крайне точно контролировать не только скорость вращения, но и текущее положение ротора.
Резюмируя все вышесказанное, отметим, что двигатели могут различаться по источнику питания (переменного и постоянного тока), скорости вращения ротора (синхронные и асинхронные), наличию коллекторного узла (коллекторные и бесколлекторные), наличию щеток (не каждый бесколлекторный двигатель бесщеточный, но каждый бесщеточный двигатель — бесколлекторный). Разумеется, классификаций существует гораздо больше, но цель статьи была в том, чтобы описать основные термины, употребляемые в сфере бытовой техники.
Да, кстати, существует еще двигатель с прямым приводом. Многие продавцы часто путаются, называя его инверторным, или же считая инверторным двигателем только двигатель с прямым приводом. Так вот, объясняем. Тип привода никак не вытекает из типа двигателя. Привод — это то, каким способом двигатель передает вращение ротора другим частям прибора. Если вращение передается через натянутый ремень, то привод будет ременным (у подавляющего большинства производителей). А если вращающийся элемент непосредственно насажен на ось ротора, то привод называется прямым. Целью этой статьи не является расследование того, какой из приводов лучше, поэтому за сим и остановимся.
И, как всегда, мы будем рады видеть вас в наших салонах, где менеджеры смогут рассказать про нюансы в бытовой технике еще более подробно!
КПД электродвигателей
Подписка на рассылку
- ВКонтакте
- ok
- YouTube
- Яндекс.Дзен
- TikTok
Электрическими двигателями переменного или постоянного тока комплектуются приводы станков, насосов и вентиляторов, а также других механизмов, используемых на предприятиях тяжелой и легкой промышленности. Рентабельность производства напрямую зависит от себестоимости продукции, на которую в большой степени влияет эффективность эксплуатации оборудования, поэтому КПД и мощность электродвигателя являются основными параметрами, на основании которых выполняется подбор привода.
Определение КПД электродвигателя
Принцип работы любой электрической машины основан на преобразовании энергии тока, протекающего по обмоткам статора и создающего магнитное поле, во вращение ротора. Коэффициент полезного действия (КПД) электродвигателя определяется соотношением вырабатываемой им механической мощности на валу (p2) к полной мощности, потребляемой из сети (p1) и выражается в процентах:
 Исходя из формулы, следует, что чем ближе этот параметр к единице, тем выше будет эффективность использования оборудования.
Исходя из формулы, следует, что чем ближе этот параметр к единице, тем выше будет эффективность использования оборудования.
Факторы, влияющие на величину КПД
Коэффициент полезного действия никогда не может быть равным единице, так как существуют неизбежные потери, снижающие полезную мощность. Они делятся на три группы:
- электрические;
- магнитные;
- механические.
Электрические потери зависят от степени нагрузки двигателя и являются следствием нагрева обмоток статора, вызванного работой тока по преодолению электрического сопротивления проводников, из которых они выполнены. Поэтому максимальный КПД электродвигателя достигается, когда нагрузка на двигатель составляет 75% от максимальной расчетной величины.
Магнитные потери происходят из-за неизбежного перемагничивания активного железа статора и ротора, а также возникновения в нем вихревых токов.
Третья группа обусловлена наличием трения в подшипниках, на которых вращается вал, а также сопротивлением, оказываемым воздухом крыльчатке вентилятора и самому ротору (якорю). Из-за наличия щеточно-коллекторного узла КПД электродвигателя постоянного тока несколько ниже коэффициента полезного действия машин с короткозамкнутым ротором. Это также относится к асинхронным электродвигателям с фазным ротором из-за дополнительного трения щеток об контактные кольца.
Способы повысить КПД двигателя
Следует помнить, что реальный коэффициент полезного действия может несколько отличатся от паспортных величин, указанных на шильдике двигателя. Чтобы выполнить расчет КПД электродвигателя в реальных условиях эксплуатации, необходимо учитывать неравномерность распределения питающего напряжения в фазах. В зависимости от величины асимметрии падение полезной мощности может достигать 5-7%.
Увеличение КПД электрической машины возможно только за счет снижения потерь и контроля качества силовой сети.
Механические потери можно уменьшить благодаря более качественным подшипникам, установки крыльчатки вентилятора, выполненной из современных материалов для уменьшения сопротивлению воздуху. Нагрев обмоток можно уменьшить благодаря использованию обмоточных проводов, выполненных из очищенной меди, имеющих меньшее сопротивление.
Снизить потери на перемагничивание активного железа и минимизировать влияние вихревых токов можно используя для набора сердечника необходимо использовать качественную электромагнитную сталь с надежной изоляцией. Кроме того, ведутся работы по разработке наилучшей геометрии зубцов статора, благодаря которым будет увеличена концентрация магнитного поля.
В реальности КПД асинхронного электродвигателя можно несколько увеличить за счет использования частотного преобразователя, позволяющего оптимизировать расход электроэнергии. Следует помнить, что эффективность эксплуатации двигателя с КПД 98% сильно упадет, если его использовать для приведения в движения механизма, имеющего более низкий коэффициент полезного действия.

