Электронный научный журнал Современные проблемы науки и образования ISSN 2070-7428 Перечень ВАК ИФ РИНЦ 0,931
Электромеханическая характеристика асинхронного двигателя зависимость

Введение
Асинхронный двигатель (АД) — электрический двигатель, нашедший очень широкое применение в различных отраслях промышленности и сельского хозяйства. АД с короткозамкнутым ротором обладает особенностями, обуславливающими его широкое распространение: простота в изготовлении, а это означает низкую начальную стоимость и высокую надежность; высокая эффективность вместе с низкими затратами на обслуживание приводят в итоге к низким общим эксплуатационным расходам; возможность работы непосредственно от сети переменного тока.
Режимы работы асинхронного электродвигателя
Двигатели с короткозамкнутым ротором — асинхронные машины, скорость которых зависит от частоты питающего напряжения, числа пар полюсов и нагрузки на валу. Как правило, при поддержании постоянного напряжения питания и частоты, если игнорируется изменение температуры, момент на валу будет зависеть от скольжения.
Вращающий момент АД можно определить по формуле Клосса:
 , (1)
, (1)
где  ,
,  — критический момент,
— критический момент,  — критическое скольжение.
— критическое скольжение.
Кроме двигательного режима асинхронный двигатель имеет ещё три тормозных режима: а) генераторный тормозной с отдачей энергии в сеть; б) торможение противовключением; в) динамическое торможение.
При положительном скольжении машина с короткозамкнутым ротором будет действовать как двигатель, при отрицательном скольжении — как генератор. Из этого следует, что ток якоря двигателя с короткозамкнутым ротором будет зависеть только от скольжения. При выходе машины на синхронную скорость ток будет минимальным.
Генераторное торможение АД с отдачей энергии в сеть наступает при частоте вращения ротора, превышающей синхронную. В этом режиме электродвигатель отдаёт в сеть активную энергию, а из сети в электродвигатель поступает реактивная энергия, необходимая для создания электромагнитного поля.
Механическая характеристика для генераторного режима является продолжением характеристики двигательного режима во второй квадрант осей координат.
Торможение противовключением соответствует направлению вращения магнитного поля статора, противоположному вращению ротора. В этом режиме скольжение больше единицы, а частота вращения ротора по отношению к частоте вращения поля статора — отрицательна. Ток в роторе, а следовательно, и в статоре достигает большой величины. Для ограничения этого тока в цепь ротора вводят добавочное сопротивление.
Режим торможения противовключением наступает при изменении направления вращения магнитного поля статора, в то время как ротор электродвигателя и соединённые с ним механизмы продолжают вращение по инерции. Этот режим возможен также и в случае, когда поле статора не меняет направления вращения, а ротор под действием внешнего момента изменяет направление вращения.
В данной статье рассмотрим построение механической характеристики асинхронного двигателя в двигательном режиме.
Построение механической характеристики с помощью модели
Паспортные данные АД ДМТ f 011-6у1: Uф =220 — номинальное фазное напряжение, В; p=3 — число пар полюсов обмоток; n=880 — скорость вращения номинальная, об/мин; Pн=1400 — мощность номинальная, Вт; Iн=5,3 — ток ротора номинальный, А; η = 0.615 — к.п.д. номинальный, %; cosφ = 0.65 — cos(φ) номинальный; J=0.021 — момент инерции ротора, кг·м 2 ; Ki = 5.25 — кратность пускового тока; Kп = 2.36 — кратность пускового момента; Kм = 2.68 — кратность критического момента.
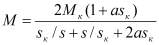
Для исследования эксплуатационных режимов асинхронных двигателей используются рабочие и механические характеристики, которые определяются экспериментально или рассчитываются на основе схемы замещения (СЗ). Для применения СЗ (рис.1) необходимо знать её параметры:
- R1, R2‘, RM — активные сопротивления фаз статора, ротора и ветви намагничивания;
- X1, X2‘, XM — индуктивные сопротивления рассеяния фаз статора ротора и ветви намагничивания.
Эти параметры требуются для определения пусковых токов при выборе магнитных пускателей и контакторов, при выполнении защит от перегрузок, для регулирования и настройки системы управления электроприводом, для моделирования переходных процессов. Кроме того, они необходимы для расчета пускового режима АД, определения характеристик асинхронного генератора, а также при проектировании асинхронных машин с целью сопоставления исходных и проектных параметров [3].
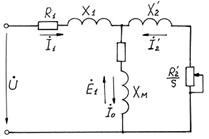
Рис. 1. Схема замещения асинхронного двигателя
Воспользуемся методикой расчёта параметров схемы замещения [3] для определения активных и реактивных сопротивлений фаз статора и ротора. Значения коэффициента полезного действия и коэффициента мощности при частичных нагрузках, необходимые для расчётов, приведены в техническом каталоге [4 стр.10]: pf = 0.5 — коэффициент частичной нагрузки, %; Ppf = Pн·pf — мощность при частичной нагрузке, Вт; η _pf = 0.56 — к.п.д. при частичной нагрузке, %; cosφ_pf = 0.4 — cos(φ) при частичной нагрузке.
Значения сопротивлений в схеме замещения: X1=4.58 — реактивное сопротивление статора, Ом; X2‘=6.33 — реактивное сопротивление ротора, Ом; R1=3.32 — активное сопротивление статора, Ом; R2‘=6.77 — активное сопротивление ротора, Ом.
Построим механическую характеристику асинхронного двигателя по формуле Клосса (1).
Скольжение определяют из выражения вида:
 , (2)
, (2)
где  — скорость вращения ротора АД, рад/сек,
— скорость вращения ротора АД, рад/сек,
синхронная скорость вращения:
 . (3)
. (3)
Критическая скорость вращения ротора:
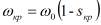 . (4)
. (4)
 . (5)
. (5)
Точку критического момента определим из выражения
 . (6)
. (6)
Пусковой момент определим по формуле Клосса при s=1:
 . (7)
. (7)
По произведенным расчетам построим механическую характеристику АД (рис. 4). Для ее проверки на практике проведем эксперимент.
Построение экспериментальной механической характеристики
При проведении эксперимента используется лабораторный стенд НТЦ-13.00.000 «Электропривод». Имеется система, состоящая из АД, к валу которого в качестве нагрузки подключен двигатель постоянного тока (ДПТ) независимого возбуждения. Необходимо построить механическую характеристику асинхронного двигателя, используя паспортные данные асинхронной и синхронной машин и показания датчиков. Имеем возможность изменять напряжение обмотки возбуждения ДПТ, измерять токи на якоре синхронного и асинхронного двигателя, частоту вращения вала. Подключим АД к источнику питания и будем нагружать его, изменяя ток обмотки возбуждения ДПТ. Проведя эксперимент, составим таблицу значений из показаний датчиков:
Таблица 1 Показания датчиков при нагрузке асинхронного двигателя
Электромеханическая характеристика асинхронного двигателя зависимость
Название работы: Механические характеристики электродвигателей
Предметная область: Физика
Описание: Скорость почти всех электродвигателей является убывающей функцией момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33]. Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Дата добавления: 2014-03-28
Размер файла: 86.95 KB
Работу скачали: 90 чел.
Механические характеристики электродвигателей
1. Естественные и искусственные механические характеристики электродвигателей
- Жесткость механических характеристик
- Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
- Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
- Естественная механическая характеристика асинхронного двигателя
- Механическая характеристика синхронного двигателя. Область применения синхронных двигателей на судах
Механической характеристикой двигателя, независимо от рода тока, называют зависимость угловой скорости вала электродвигателя ω (далее двигателя) от электромагнитного момента двигателя , т.е зависимость ω ().
Здесь следует сделать важное замечание: в соответствии с уравнением моментов, в установившемся режиме = , электромагнитный момент двигателя уравновешивается статическ им момент ом ( момент ом сопротивления) механизма. Это означает, что величина электромагнитного момента двигателя полностью зависит от момента механизма чем больше тормозной момент механизма, тем больше вращающий момент двигателя, и наоборот.
То есть, для любого двигателя входной величиной является момент механизма, а выходной его скорость .
Скорость почти всех электродвигателей является убывающей функцей момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33]. Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Жёсткость механические характеристик электропривода β это отношение разности электромагнитных моментов двигателя при разных скоростях к соответствующуй разности угловых скоростей электропривода .
β = ( М 2 М 1 ) /( ω 2 ω 1 ) = Δ / Δω
Обычно на рабочих участках механические характеристики электродвигателей имеют отрицательную жёсткость β 2 1 ,
М 1 М 2 ) при большей скорости электромагнитный момент меньше.
Различают естественные и искусственные механические характеристик и электродвигателей .
Естественная механическая характеристика это зависимость ω(), снятая при нормальных условиях работы двигателя, т.е. при номинальных параметрах питающей сети и отсутствии добавочных резисторов в цепях обмоток двигателей.
К параметрам питающей сети относятся: при постоянном токе напряжение, при переменном токе напряжение и частота тока.
Характеристики, снятые при условиях, отличных от нормальных , называют искусственными .
Искусственные характеристики можно получить путем изменения параметров двигателя, например, путем введения резисторов в цепь обмотки якоря двигателя постоянного тока или в цепь обмотки ротора асинхронного двигателя, либо изменением параметров питающей сети, т.е. напряжения и частоты переменного тока.
Каждый электродвигатель имеет одну естественную и множество искусственных характеристик. Число искусственных характеристик зависит от числа ступеней регулирующего элемента, например, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя постоянного тока. Если у двигателя таких ступеней пять, то такой двигатель имеет шесть характеристик пять искусственных и одну естественную.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможение, и др.
Рассмотрим естественн ые механические характеристики двигателей разных типов .

Рис. 10.1 Естественная механическая (а) и угловая (б) характеристики синхронного двигателя; θ угол отставания оси ротора от оси магнитного поля обмотки статора
Естественная механическая характеристика синхронного двигателя
Естественная механическая характеристика синхронного двигателя (рис. 10.1а ) абсолютно жесткая это характеристика при которой скорость с изменением момента не изменяется , ее жесткость (β = ∞)
C табильность скорости ротора синхронного двигателя объясняется угловой характеристики синхронного двигателя θ() следующим образом ( рис. 10.1 б ), если механическая нагрузка к ротору не приложена, то оси ротора и вращающегося магнитного поля обмотки статора совпадают, т.е. θ = 0° (точка 0 на рис. 10.1 б). Если электромагнитный момент двигателя М = 0, двигатель работает в режиме холостого хода.
Если приложить к валу двигателя механическую нагрузку и увеличивать ее, то ротор под действием механической нагрузки станет отставать от магнитного поля обмотки статора на все больший угол θ.
Чем больше механическая нагрузка на валу, тем больше этот угол и тем больше вращающий электромагнитный момент двигателя.
Такое одновременное увеличение вращающего момента двигателя, вызываемое увеличением тормозного момента механизма как раз и обеспечивает стабильность скорости двигателя ( на рис. 10.1 а участок характеристики от = 0 до = ).
Однако постоянство скорости двигателя сохраняется до тех пор, пока угол θ≤90°. При θ = 90° двигатель развивает критический (максимальный) момент (точка А на рис. 10.1 а).
Если при θ = 90° вновь увеличить механическую нагрузку (θ > 90°), электромагнитный момент двигателя станет уменьшаться (отрезок АВ угловой характеристики), т.е. этот момент окажется меньше тормозного момента механизма. В результате скорость ротора двигателя станет уменьшаться, и в конце концов ротор остановится.
Поскольку при этом скорость ротора меньше скорости вращающегося магнитного поля обмотки статора, говорят, что двигатель выпал из синхронизма.
Как следует из угловой характеристики двигателя, условие выпадения двигателя из синхронизма такое: θ≤90°.
На практике номинальный угол θ= 20…40°.
Область применения синхронных двигателей: на судах в качестве гребных электродвигателей, вращающих винты; на берегу для привода мощных механизмов, например, компрессоров на газоперекачивающих станциях.
Естественная механическая характеристика двигателя постоянного тока
Естественная механическая характеристика двигателя постоянного тока паралельного возбуждения ( рис. 8.5 ) ж ё сткая , потому что ее жёсткость

Рис. 10.2 Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Это означает, что при изменении электромагнитного момента двигателя в широких пределах его скорость достаточно стабильна (т.е. изменяется незначительно).
Такие двигатели применяются там, где при изменении нагрузки механизма в широких пределах скорость двигателя не должна изменяться резко в электроприводах насосов, вентиляторов и т.п.

Рис. 10.3 Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения (рис. 10.3 ) мягкая , потому что ее жёсткость
Это означает, что при изменении электромагнитного момента двигателя даже в небольших пределах его скорость изменяется значительно.
Напомним две характерные особенности этого двигателя двигателя постоянного тока последовательного возбуждения :
- П ри уменьшении механической нагрузки на валу или ее отсутствии ( = )
скорость двигателя резко увеличивается, двигатель «идет вразнос». Поэтому этот двигатель нельзя оставлять без нагрузки на валу;
- При пуске двигатель развивает пусковые моменты больше, чем у двигателей других типов.
Эти двигатели не применяются на судах, но применяются на берегу, например, в электротранспорте, в частности, в троллейбусах, где они не остаются без нагрузки на валу и где нужны большие пусковые моменты (при трогании троллейбуса с места).

Рис. 10.4 Естественные механические характеристики двигателей постоянного тока смешанного возбуждения: 1 с параллельно-последовательным возбуждением;
2 — с последовательно параллельным возбуждением
Естественная механическая характеристика двигателя постоянного тока смешанного возбуждения промежуточная между характеристиками двигателей паралельного и последовательного возбуждения, т.к. магнитный поток возбуждения создается совместным действием обеих обмоток параллельной и последовательной.
Различают два вида двигателей смешанного возбуждения:
- с паралельно последовательным возбуждением, у которых основную часть результирующего магнитного потока создает параллельная обмотка (до 70%, остальные 30% последовательная);
2. с последовательно параллельным возбуждением, у которых основную часть результирующего магнитного потока создает последовательная обмотка (до 70%, остальные 30% параллельная).
Поэтому график механической характеристики двигателя первого вида более жесткий, чем у двигателя второго вида.
Обе механические характеристики мягкие , потому что их жесткость
На судах двигатели смешанного возбуждения применяются в регулируемых электроприводах лебедках, кранах, брашпилях и шпилях.
Естественная механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателя имеет два участка нерабочий (разгонный) АВ и рабочий ВС D (рис. 8.8).

Рис. 10.5 Естественная механическая характеристика асинхронного двигателя
При пуске двигатель развивает пусковой момент (отрезок ОА), после чего разгоняется по траектории АВС до точки С. При этом на участке АВ одновременно увеличиваются как скорость, так и момент, в точке В двигатель развивает максимальный момент . На участке ВС скорость продолжает увеличиваться, а момент уменьшается, до номинального (точка С). На участке BC двигатель перегружен , т.к. в любой точке этого участка электромагнитный момент двигателя больше номинального ( > > ).
В нормальних условиях двигатель работает на участке С D , жесткость которого
Это означает, что при изменении момента в широких пределах скорость двигателя изменяется незначительно.
Асинхронные двигатели нашли самое широкое применение на судах с электростанцией на переменном токе.
Промышленность выпускает специально для судов асинхронные двигатели разных серий, например, 4А…ОМ2 (четвертая серия асинхронных двигателей), МАП (морской асинхронный полюсопереключаемый), МТ F ( c фазным ротором) и др.
При этом двигатели серии 4А односкоростные, серии МАП двух- и трехскоростные, серии МТ F число скоростей определяется схемой управления ( до 5 скоростей ).
Вращающий момент асинхронного двигателя
На ротор и полюсы статора действуют электромагнитные вращающие
моменты, одинаковые по величине и направленные в противоположные стороны.
Мощность, необходимая для вращения статорных полюсов с синхронной частотой,
 ,
,
где  — угловая скорость.
— угловая скорость.
Механическая мощность, развиваемая ротором,

где  — угловая скорость ротора.
— угловая скорость ротора.

где РЭ2 — электрические потери в роторной обмотке;
m2 — число фаз обмотки ротора;
R2 — активное сопротивление обмотки ротора;
I2 — ток ротора.

 (7).
(7).
Вращающий момент, с учетом (6),
 .
.
где  , КТ — коэффициент трансформации двигателя с заторможенным ротором.
, КТ — коэффициент трансформации двигателя с заторможенным ротором.
 ,
,
где U1 — напряжение сети.
 (8).
(8).
где  — константа.
— константа.
На рис. 5 изображена зависимость электромагнитного момента от скольжения в виде сплошной линии.
Пусть исполнительный механизм, приводимый во вращение данным двигателем, создает противодействующий тормозной момент М2.
На рис.5 имеются две точки, для которых справедливо равенство Мэм = М2 ;
это точки а и в .
В точке а двигатель работает устойчиво. Если двигатель под влиянием какой-либо причины уменьшит частоту вращения, то скольжение его возрастет, вместе с ним возрастет вращающий момент. Благодаря этому частота вращения двигателя повысится, и вновь восстановится равновесие Мэм = М2 ;.
В точке в работа двигателя не может быть устойчива: случайное отклонение частоты вращения приведет либо к остановке двигателя, либо к переходу его в точку а .
Следовательно, вся восходящая ветвь характеристики является областью устойчивой работы двигателя, а вся нисходящая часть — областью неустойчивой работы. Точка б , соответствующая максимальному моменту, разделяет области устойчивой и неустойчивой работы.
Максимальному значению вращающего момента соответствует критическое скольжение Sk . Скольжению S = 1 соответствует пусковой момент. Если величина противодействующего тормозного момента М2 больше пускового МП, двигатель при включении не запустится, останется неподвижным.
Максимальный момент найдем следующим образом. Сначала определим значение критического скольжения, при котором функция Мэм будет максимальной. Для этого первую производную функции по скольжению S от выражения (8) приравняем нулю.
 . (9)
. (9)
Подставив значение критического скольжения в формулу (8), получим
 . (10)
. (10)
Из формул (8), (9), (10) видно:
- величина максимального вращающего момента не зависит от активного сопротивления цепи ротора;
- с увеличением активного сопротивления цепи ротора максимальный вращающий момент, не изменяясь по величине, смещается в область больших скольжений (см. кривая 1 рис. 12,5);
- вращающий момент пропорционален квадрату напряжения сети.
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА Механическая характеристика трехфазного асинхронного двигателя с короткозамкнутым ротор
Схема включения асинхронного электродвигателя с короткозамкнутым ротором показана на рис. 7.1, а. Механическая характеристика двигателя выражает зависимость между вращающим моментом и частотой вращения п, угловой скоростью или скольжением s.
Упрощенное уравнение механической характеристики асинхронного двигателя (формула Клосса) имеет вид


Зная величину Мн и si; и задаваясь значениями s, можно построить механическую характеристику асинхронного двигателя (рис. 7.1, б).
Участок 1, 2 представляет собой рабочую, устойчивую часть характеристики, на которой двигатель работает устойчиво. Потеря скорости при изменении нагрузки составляет 3—6% номинальной, поэтому эту часть характеристики относят к разряду жестких.
Участок характеристики 2, 3 — нерабочий. Двигатель работать под нагрузкой на этой части характеристики не может, поэтому эту часть характеристики называют неустойчивой.
Отношение критического момента Mti к номинальному /Ином называется перегрузочной способностью двигателя Л:
Отношение пускового момента Ма к номинальному Меом называется кратностью пускового момента


Такой частоты вращения ротор двигателя не может достичь самостоятельно, так как для этого необходимо, чтобы момент сопротивления был равен нулю.
Величина пускового тока в 3—8 раз больше номинального, поэтому недопустимо держать включенным двигатель, если он не развернулся после включения или если он опрокинулся (остановился) в результате перегрузки.
Трехфазный асинхронный электродвигатель с коротко- замкнутым ротором имеет следующие положительные качества: простота конструкции; отсутствие нормально искрящих частей; большая перегрузочная способность и жесткость характеристики; надежность в работе и дешевизна в изготовлении.
Наряду с положительными качествами электродвигатель с короткозамкнутым ротором имеет следующие недостатки: высокая чувствительность двигателя к колебаниям напряжения; большой пусковой ток; малый пусковой момент.
Учитывая особенности механической характеристики асинхронных электродвигателей с короткозамкутым ротором, применять их рекомендуется для установок с жесткой характеристикой, перегружаемых в процессе работы и запускаемых без нагрузки.
Трехфазные асинхронные двигатели с короткозамкнутым ротором общего назначения из-за малых пусковых моментов и больших пусковых токов мало пригодны для привода горных машин. Для них созданы специальные короткозамкнутые электродвигатели с уменьшенным пусковым током и увеличенным пусковым моментом, v В основу улучшения пусковых свойств короткозамкнутых двигателей положен принцип автоматического включения дополнительного активного сопротивления в обмотку ротора на период пуска при сохранении принципиального устройства короткозамкнутого ротора. Осуществление этого принципа достигается за счет специальной конструкции обмоток ротора, активное сопротивление которых автоматически изменяется по мере изменения скольжения в двигателе. Для этого обмотки ротора выполняются либо с глубоким пазом (рис. 7.2, б), либо с двойной «беличьей клеткой» (рис. 7.2, а).

Механические характеристики двигателя с глубоким пазом 1 и двигателя с двойной «беличьей клеткой» 2 приведены на рис. 7.2 в.
Как видно из характеристик, пусковой момент двигателя с двойной «беличьей клеткой» больше критического, поэтому опрокидывание этого двигателя в результате перегрузки менее вероятно. Даже при вынужденной остановке двигатель сохранит большой пусковой момент п легко разгонится, как только будет устранена причина перегрузки.