Электромеханическая характеристика двигателя параллельного возбуждения
Электромеханическая характеристика двигателя параллельного возбуждения
Рис. 7. Схема включения двигателя постоянного тока параллельного возбуждения
Для построения механической характеристики двигателя параллельного возбуждения достаточно иметь две ее точки, так как характеристика имеет вид прямой линии (прямолинейна).
На рис. 8 приведены естественные и искусственные механические характеристики двигателя постоянного тока параллельного возбуждения.
Рис. 8. Механические характеристики двигателя постоянного тока с параллельным возбуждением
1 — естественная; 2 — искусственные при различных потоках возбуждения; 3 — искусственные при различных напряжениях; 4 — искусственные при различных сопротивлениях в цепи якоря
Искусственные механические характеристики, получаемые за счет изменения магнитного потока Ф или подводимого напряжения U (рис. 8, прямые 2 и 3), являются жесткими характеристиками, а получаемые за счет изменения сопротивления якорной цепи R — мягкими характеристиками (рис. 8, прямая 4).
Реверсирование вращения двигателя постоянного тока осуществляется изменением направления тока либо в обмотке якоря, либо в обмотке возбуждения. Переключение обмотки возбуждения практикуется реже, так как вследствие ее индуктивности время торможения возрастает по сравнению с переключением обмотки якоря.
Скоростные и механические характеристики, соответствующие условиям задачи, представлены на рис. 9.
Рис. 9. Естественная и искусственные скоростные (а) и механические (б) характеристики двигателя параллельного -возбуждения (к примеру 2)
В современных электроприводах часто возникает необходимость останавливать производственный механизм или изменять направление его движения. Эти операции можно осуществлять переводом электродвигателя в тормозной режим работы по одной из механических характеристик, отвечающих выбранному способу электрического торможения. Механические характеристики двигателя с параллельным возбуждением для различных режимов работы представлены на рис. 10.
Рис. 10. Механические характеристики двигателя с параллельным возбужденней при различных режимах работы
В этом режиме ток и момент на валу двигателя отрицательны. Рассматриваемый тормйзной режим работы электродвигателя создается автоматически, без каких-либо переключений в нормальной схеме, если ток возбуждения увеличивается или скорость вращения двигателя повышается сверх возможной скорости п0. В этом случае электрическая машина работает как генератор, отдавая электрическую энергию в сеть. Развиваемый машиной тормозной момент уравновешивается движущим моментом, приложенным к валу. Этот способ торможения применяется в крановых и других установках при спуске груза. Генераторное торможение в электроприводах с частыми пусками и остановками является весьма экономичным, поскольку оно сопровождается отдачей электроэнергии в сеть.
Генераторное торможение с отдачей энергии в сеть.
Механические характеристики машины в режиме генераторного торможения с отдачей энергии в сеть являются естественным продолжением характеристик двигательного режима в область квадранта II (см. рис. 10).
Генераторное торможение при замыкании якоря машины на сопротивление (динамическое торможение).
Механические характеристики машины в рассматриваемом режиме проходят через начало координат, располагаясь в квадранте II (см. рис. 10), так как при положительном значении скорости вращения ток и момент отрицательны по знаку. Жесткость характеристик уменьшается с увеличением сопротивления якорной цепи. В режиме динамического торможения машина работает генератором за счет кинетической энергии, накопленной во вращающихся инерционных массах электропривода и производственного механизма.
Схема включения двигателя, позволяющая перевести его в режим динамического торможения, приведена на рис. 11. Для осуществления торможения якорь двигателя необходимо отключить от сети контактором К и замкнуть его на сопротивление Rn контактором КТ. Обмотка возбуждения при этом остается включенной в сет‘ь так же, как и в двигательном режиме. Якорь двигателя, как уже указывалось, будет продолжать вращаться за счет кинетической энергии, запасенной в движущихся частях привода. Возникающая при этом э. д. с. ея вызовет ток в цепи якоря. Направление э. д. с. сохранится то же, что и в двигательном режиме, а ток и момент двигателя изменят свое направление. Двигатель будет развивать тормозной момент, направленный против движения. Под его воздействием произойдет быстрая остановка двигателя и связанных с ним вращающихся частей механизма.
Торможение прогивовключением. Механические характеристики двигателя в рассматриваемом режиме являются продолжением в квадрант IV механических характеристик двигательного режима (см. рис. 10).
Режим противовключения имеет место, когда момент на валу от груза (в подъемных механизмах) оказывается больше предельного момента, который может развивать электродвигатель в двигательном ‘режиме. В этом случае груз под действием своего веса начнет опускаться, что приведет к вращению электродвигателя в сторону’, противоположную той, которая определяется полярностью приложенного напряжения при данном включении обмоток. Направление тока при этом остается неизменным, т. е. таким же, что и в двигательном режиме; момент двигателя также сохраняет свой знак, но по отношению к новому установившемуся движению он будет являться тормозным.
Рис. 11. Схема включения двигателя при динамическом торможении
Величина тока в режиме противовключения больше, чем в двигательном режиме, поэтому и величина момента, развиваемая двигателем при торможении противо-включением, также увеличивается.
Режим противовключения часто используется в электроприводах для быстрого изменения направления их вращения—реверсирования.
Тормозной режим работы двигателя противовключе-нием может быть использован и для быстрой остановки производственного механизма. Для этого надо изменить полярность напряжения на зажимах обмотки якоря. Схема включения двигателя при торможении противовключением представлена на рис. 12. До перехода в режим противовключения якорь двигателя подключен к сети контактором КВ. Для осуществления торможения якорь двигателя отключается от сети этим контактором и снова включается в сеть контактором КН. При этом изменяется полярность напряжения на обмотке якоря и направление тока в нем. Двигатель создает тормозной момент и начинает останавливаться. Ограничение тока якоря в тормозном режиме производится путем включения добавочного сопротивления RB в цепь якоря. Переключение двигателя с помощью контакторов происходит автоматически, и скорость вращения двигателя за время переключения практически не изменяется.
Рис. 12. Схема включения двигателя при торможении противовключением
Следует иметь в виду, что если якорь двигателя не будет отключен от сети при скорости, близкой к нулю, то в соответствии со схемой включения двигателя начнется разбег его в обратном направлении.
При торможении противовключением двигатель Не только преобразует кинетическую энергию, запасенную в движущихся частях, в электрическую, но и потребляет энергию из сети. Энергия затрачивается (теряется) на нагрев сопротивлений в цепи якоря.
Из последнего равенства следует, что между моментом электродвигателя с последовательным возбуждением и его скоростью в области небольших нагрузок (ненасыщенная магнитная цепь) существует гиперболическая зависимость.
Механические характеристики электродвигателя с последовательным возбуждением при различных режимах работы приведены на рис. 14.
2. Электродвигатели с последовательным возбуждением
На рис. 13 приведена схема включения двигателя последовательного возбуждения.
Уравнение скоростной характеристики электродвигателя с последовательным возбуждением то же, что и для электродвигателя с параллельным возбуждением.
Поскольку магнитный поток пропорционален величине тока, можно, подставляя в формулу значение из равенства, получить путем преобразований выражение механической характеристики для двигателя с последовательным возбуждением:
Рис. 13. Схема включения двигателя постоянного тока последовательного возбуждения
Рис. 14. Механические характеристики двигателя с последовательным возбуждением при различных режимах работы
Анализ характера механической характеристики электродвигателя с последовательным возбуждением позволяет сделать следующие выводы:
а) при нагрузках ниже 20—25% номинальной работа электродвигателя на естественной характеристике практически недопустима из-за чрезмерного увеличения скорости вращения якоря (рис. 14, кривая 1);
б) с увеличением дополнительного сопротивления в цепи якоря жесткость механической характеристики уменьшается и она смещается вниз (рис. 14, кривая 2);
в) кривая механической характеристики асимптотически, как это следует из рис. 14, приближается к оси ординат, не пересекаясь с ней, из чего следует, что повышением скорости вращения нельзя перевести электродвигатель с последовательным возбуждением в генераторный режим работы с отдачей энергии в сеть (как это возможно у машины с параллельным возбуждением).
Для торможения машины с последовательным возбуждением обычно применяют противовключение или динамическое торможение.
При торможении противовключением механические характеристики являются продолжением характеристик двигательного режима в область отрицательной скорости. При этом в цепь двигателя вводится дополнительное сопротивление для ограничения тока. Двигатель с последовательным возбуждением работает в режиме противовключения при перемене полярности якоря. В обмотке возбуждения направление тока должно оставаться неизменным.
При динамическом торможении механические характеристики двигателя расположены в квадранте II. Тормозной момент в режиме динамического торможения при самовозбуждении уменьшается со снижением скорости машины.
Более эффективным является динамическое торможение с независимым возбуждением. В этом случае обмотка якоря отключается от сети и замыкается на внешнее сопротивление, а обмотка возбуждения подсоединяется к сети через дополнительное сопротивление. Поскольку в последнем случае двигатель работает генератором с независимым возбуждением, его характеристики подобны характеристикам двигателя с параллельным возбуждением при динамическом торможении. Эти характеристики прямолинейны и все пересекаются в начале координат, обладая большей жесткостью при меньших сопротивлениях.
Рис. 15. Схема включения двигателя в режиме динамического торможения при независимом питании обмотки возбуждения от сети
На рис. 15 приведена схема включения двигателя в режиме динамического торможения при независимом питании обмотки возбуждения от сети,
Двигатели постоянного тока, как обладающие большим пусковым моментом и выдерживающие значительные кратковременные перегрузки, нашли широкое применение в электроприводе крупных экскаваторов. К недостаткам применения двигателей постоянного тока относится необходимость установки преобразователей переменного тока в постоянный для питания этих двигателей.
Расчет естественной электромеханической и механической характеристик двигателя постоянного тока независимого (параллельного) возбуждения
Страницы работы



Содержание работы
Для двигателя постоянного тока независимого (параллельного) возбуждения, параметры которого представлены в таблице 4, получающего питание от источника напряжения, необходимо решить 11 заданий.
Таблица 4 – Технические данные двигателя постоянного тока параллельного возбуждения
1). Рассчитать и построить естественную электромеханическую и механическую характеристики.
Номинальная угловая скорость определена как

Так как в рассматриваемом примере конструктивные параметры двигателя не заданы, поэтому определяем сразу произведение с∙Фн:

Здесь в Rя учтены сопротивления собственно обмотки якоря, дополнительных полюсов и компенсационной обмотки, щеточных контактов.
Скорость идеального холостого хода определяется из выражения:
Номинальный электромагнитный момент равен:

Уравнение естественной механической характеристики
Уравнение естественной электромеханической характеристики
На рисунке 4 приведена естественная механическая характеристика, а на рисунке 5 электромеханическая характеристика двигателя.
Рисунок 4 – Естественная механическая характеристика
Рисунок 5 – Естественная электромеханическая характеристика
2). Рассчитать и построить пусковые характеристики при статическом моменте Мс=0.8∙Мн и определить величины пусковых резисторов. Число пусковых ступеней принять m=4.
Зададимся пусковым током

Рассчитаем статический ток, соответствующий Мс = 0,8∙Мн

Суммарное сопротивление якорной цепи двигателя при пуске
При заданном числе ступеней пуска m кратность токов переключений при пуске λ =I1/I2 определяется, как
Ток переключения при этом составит
Вычисляем сопротивления секций пускового реостата:
Пусковые характеристики представлены на рисунке 6.
Рисунок 6 – Пусковые характеристики
3). Определить скорость двигателя при введении в цепь якоря дополнительного сопротивления Rдоп=2∙Rя и при статическом моменте Мс=0.5∙Мн.
Чтобы определить скорость двигателя при введении в цепь якоря дополнительного сопротивления Rдоп=2∙Rя и при статическом моменте Мс=0.5∙Мн, необходимо подставить эти значения в уравнение механической характеристики.

4). Определить значение дополнительного сопротивления, которое следует включить в цепь якоря, чтобы при изменении полярности напряжения на зажимах якоря ток был бы равен 2.2∙Iн, при начальной скорости равной номинальной. Построить соответствующую искусственную характеристику.
Рассчитаем начальный тормозной момент

Значение дополнительного сопротивления, которое следует включить в цепь якоря, чтобы при изменении полярности напряжения на зажимах якоря ток был бы равен 2.2∙Iн найдем по формуле

Величина тормозного момента при нулевой скорости

Соответствующая искусственная характеристика режима противовключения с подключением добавочного сопротивления представлена на рисунке 7.
Рисунок 7 – Рассчитанная характеристика
5). Рассчитать и построить электромеханические и механические характеристики для двух значений магнитного потока: Ф1=0.8∙Фн и Ф2=0.5∙Фн.
Определяем коэффициенты при ослабленном потоке

Скорость идеального холостого хода при ослабленном потоке
Модуль жесткости механической характеристики
Уравнения механической и электромеханической характеристик при Ф1 = 0.8∙Фн.
Уравнения механической и электромеханической характеристик при Ф2 = 0.5∙Фн.
Построенные механические характеристики для двух значений магнитного потока и естественная характеристика двигателя представлены на рисунке 8.
Построенные электромеханические характеристики для двух значений магнитного потока и естественная характеристика двигателя представлены на рисунке 9.
Рисунок 8 – Рассчитанные механические характеристики
Рисунок 9 – Рассчитанные электромеханические характеристики
6). Определить скорость двигателя при одновременном снижении на 30% напряжения на якоре и на обмотке возбуждения, если Мс=0.5∙Мн.
Так как напряжение на обмотке возбуждения снижается, следовательно, коэффициент ЭДС сФ=0.7∙сФн. Тогда скорость идеального холостого хода будет равна

Скорость двигателя, при этом режиме работы, рассчитывается с помощью уравнения механической характеристики

7). Определить дополнительное сопротивление, обеспечивающее в режиме динамического торможения ток якоря -2.2∙Iн при начальной скорости, равной номинальной. Построить соответствующую характеристику.
Рассчитаем величину начального тормозного момента при токе якоря равного -2∙Iн

Дополнительное тормозное сопротивление определим по формуле

На рисунке 10 представлена работа двигателя в режиме динамического торможения.
Рисунок 10 – Режим динамического торможения
8). Построить две искусственные механические характеристики при снижении напряжения на якоре: U1=0.7∙Uн и U2=0.4∙Uн.
Рассчитаем скорость идеального холостого хода при пониженном напряжении
Уравнения механической характеристики при различных напряжениях двигателя примут вид
Механические характеристики при различных напряжениях двигателя представлены на рисунке 11.
Рисунок 11 – Рассчитанные механические характеристики
9). Рассчитать и построить электромеханическую и механическую характеристики двигателя в схеме шунтирования якоря при Rш=4∙Rя и Rп=5∙Rя.
Рассмотрим на практике.
10). Рассчитать и построить естественную электромеханическую и механическую характеристики двигателя при питании от источника тока.
При питании двигателя от источника тока ток якоря постоянен Iя=const, следовательно, момент двигателя постоянен Мдв= const, а значит естественная электромеханическая и механическая характеристики двигателя будут прямыми линиями, параллельными оси скорости.
Рисунок 12 – Естественная механическая характеристика
Рисунок 13 – Естественная электромеханическая характеристика
11). Описать все энергетические режимы двигателя при питании от источника напряжения и источника тока и перечислить основные различия.
См. книгу Москаленко В.В. — Электрический привод (1991).djvu стр.50.
12). Перечислить все возможные способы регулирования скорости двигателя.
1. Реостатное регулирование скорости.
2. Параметрическое регулирование скорости изменением напряжения на якоре.
3. Автоматическое регулирование скорости при питании двигателя от источника тока.
4. Регулирование скорости изменение потока двигателя.
5. Импульсное параметрическое регулирование скорости.
Большая Энциклопедия Нефти и Газа
Механическая характеристика — двигатель — постоянный ток
Механическая характеристика двигателя постоянного тока с параллельным возбуждением приведена на рис. 15.4. Запуск двигателя осуществляется пусковым реостатом /, который имеет несколько секций и позволяет изменять сопротивление ступенчато. [2]
Механические характеристики двигателя постоянного тока с независимым возбуждением при различных значениях напряжения на якоре и потока возбуждения ( и соответственно тока возбуждения) показаны на рис. 27, а. Характеристики двигателя при других условиях называют искусственными. Частота вращения двигателя вниз от номинальной регулируется путем снижения напряжения на якоре ( первая зона регулирования, кривые 2, 3, 4), вверх от номинальной — путем регулирования тока и потока возбуждения. [3]
Механические характеристики двигателя постоянного тока независимого возбуждения , управляемого тиристор-ным выпрямителем, напоминают характеристики в системе Г — Д ( рис. 4.13), однако они отличаются рядом особенностей. [5]
Рассмотрим механические характеристики двигателей постоянного тока в зависимости от способа возбуждения. [6]
Какие механические характеристики двигателей постоянного тока называют искусственными. [7]
Почему механические характеристики двигателя постоянного тока независимого и параллельного возбуждения прямолинейны, а последовательного возбуждения — криволинейны. [8]
Особенностью механической характеристики двигателей постоянного тока с последовательным возбуждением является нижний предел допустимой нагрузки. Этому соответствует нагрузка около 10 % номинального момента, ниже которой двигатель не должен быть нагружен по условиям его механической прочности. Ограничение скорости может диктоваться и конструкцией самой рабочей машины или технологическими особенностями ее использования. Это требование в некоторых случаях заставляет отказываться от применения двигателей с последовательным возбуждением. [10]
Построить механическую характеристику двигателя постоянного тока с параллельным возбуждением, для которого известны следующие каталожные данные: Рн 5 8 кет; пн 800 об / мин; UH 220 в; 1 34 а; гя 0 22 ом. [11]
На графике изображена механическая характеристика двигателя постоянного тока . Какая величина должна быть отложена по оси ординат. [12]
В отличие от механических характеристик двигателя постоянного тока с независимым возбуждением, механические характеристики асинхронного двухфазного двигателя непрямолинейны. Однако в области невысоких скоростей ( примерно до 55 % синхронной скорости), являющейся рабочей областью для таких двигателей, механические характеристики достаточно точно аппроксимируются отрезками прямых. [13]
На рис. 3.9.3.4 представлены механические характеристики двигателя постоянного тока при двухзонном регулировании скорости. При регулировании потоком возбуждения с увеличением скорости жесткость механических характеристик уменьшается. Следует отметить, что в замкнутых системах регулирования скорости вид механических характеристик можно формировать в зависимости от поставленной задачи. При этом в некотором диапазоне изменения момента нагрузки можно создать практически абсолютно жесткую характеристику, а при определенном моменте практически абсолютно мягкую. [15]
Характеристики двигателей параллельного возбуждения
Определение
Электродвигателем параллельного возбуждения называется двигатель постоянного тока, обмотка возбуждения которого включена параллельно обмотке якоря (рис. 1). При снятии характеристик к цепи якоря подводится номинальное напряжение Uн=const.

Рис. 1 — Схема двигателя параллельного возбуждения
Ток, потребляемый двигателем из сети, определяется суммой I=Ia+Iв, ток возбуждения обычно равен Iв=(0,03…0,04)Iн. Все характеристики двигателя снимаются при постоянных сопротивлениях в цепях возбуждения rв=const и якоря
Скоростная характеристика.
Из уравнения ЭДС для электродвигателя

Как видно из выражения,частота вращения двигателя зависит от двух факторов — изменения тока нагрузки и потока. При увеличении тока нагрузки падение напряжения в сопротивлении цепи якоря увеличивается, а частота вращения двигателя уменьшается.
Поперечная реакция якоря размагничивает двигатель, т.е. с ростом тока Ia уменьшается поток и, следовательно, увеличиваются обороты двигателя. Таким образом, оба фактора действуют в отношении оборотов машины встречно и вид скоростной характеристики будет определяется их результирующим действием.
На рис. 2 показаны три разные скоростные линии двигателя (кривые 1,2,3). Кривая 1 — скоростная характеристика при преобладании влияния Ia?r,кривая 2 — оба фактора приблизительно уравновешиваются, кривая 3 — преобладает фактор размагничивающего действия реакции якоря.
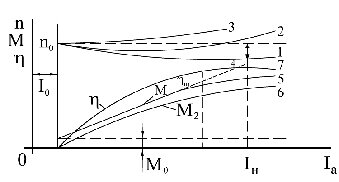
Рис. 2 — Характеристики двигателя параллельного возбуждения
Ввиду того, что в реальных машинах изменение потока Ф незначительно, скоростная характеристика является практически прямой линией. На ряде современных машин параллельного возбуждения для компенсации влияния поперечной реакции якоря устанавливается дополнительная стабилизирующая обмотка возбуждения, которая полностью или частично компенсирует влияние реакции якоря.
Нормальной формой скоростной характеристики, при которой обеспечивается устойчивая работа двигателя, имеет вид кривой 1.
Наклон характеристики определяется величиной сопротивления цепи якоря ?r без учета реакции якоря. Когда добавочных сопротивлений в цепь якоря не включено, характеристика называется естественной. Естественная характеристика двигателя параллельного возбуждения достаточно жесткая. Обычно , где no — частота вращения при холостом ходе. При включении в цепь якоря добавочных сопротивлений Rрг, наклон характеристик увеличивается, они становятся «мягкими» и называются искусственными или реостатными.
Моментная характеристика
Это зависимость М=f(Ia) при rв=const, U=Uн и ?r=const. В установившемся режиме работы двигателя согласно

имеем Mэм = M2+M = смIaФ. Если бы в процессе работы машины поток Ф не изменялся, то моментная характеристика представляла бы собой прямую (линия 4, рисунок 2). В действительности поток Ф с ростом тока Ia несколько уменьшается из-за размагничивающего действия реакции якоря, поэтому моментная характеристика слегка наклонена вниз (кривая 5). Характеристика полезного момента располагается ниже кривой электромагнитного момента на величину момента холостого хода (кривая 6).
Характеристика КПД
?=f(Ia) снимается при U=Uн, rв=const, ?r=const и имеет типичный для электродвигателей вид (характеристика 7 на рис. 2). КПД быстро растет при увеличении нагрузки от холостого хода до 0,25Рн , достигает максимального значения при Р=(0,5…0,75)Рн, а затем до Р=Рн остается почти неизменным. Обычно в двигателях малой мощности ?=0,75…0,85, а в двигателях средней и большой мощности ?=0,85…0,94.
Механическая характеристика
Представляет зависимость n=f(M) при U=Uн, Iв=const и ?r=const. Аналитическое выражение для механической характеристики можно получить из уравнения ЭДС электродвигателя

Определив ток Iа из выражения М = сеIaФ и подставив это значение тока в выражение выше, получим
Если пренебречь реакцией якоря и считать, что поток Ф не изменяется, то механические характеристики электродвигателя параллельного возбуждения можно представить в виде прямых (рис. 3), наклон которых зависит от величины сопротивления Rрг включенного в цепь якоря. При Rрг=0 характеристика называется естественной.

Рис. 3 — Механические показатели двигателя параллельного возбуждения
Следует помнить, что при обрыве цепи возбуждения Iв=0 обороты n. т.е. двигатель идет «вразнос», поэтому его необходимо немедленно отключить от сети.