0сновные технические данные и характеристики тяговых двигателей
0сновные технические данные и характеристики тяговых двигателей
Описание электропоездов и электровозов, расписание поездов, фотографии
§ 16. 0сновные технические данные и характеристики тяговых двигателей
В отличие от большинства электрических машин общепромышленного назначения тяговые двигатели работают в самых разнообразных эксплуатационных условиях и режимах. Так, двигатель подвержен значительным динамическим усилиям, воздействующим на него со стороны пути. Наибольшее динамическое воздействие испытывает двигатель, если он опирается непосредственно на ось движущейся колесной пары (опорно-осевое подвешивание) .
При опорно-рамном подвешивании, которое применено на электровозе ЧС2Т, динамические усилия, воспринимаемые двигателем, существенно ниже. Тем не менее даже в этом случае уровень динамических ускорений тяговых двигателей, жестко закрепленных на раме тележки, достигает l,25g (д — ускорение земной силы тяжести).
Условия работы тяговых двигателей усложняются также вследствие изменения в широком диапазоне температуры, влажности воздуха, отсутствия возможности полностью исключить попадание в машину снега, влаги, пыли.
Резкие колебания напряжения на зажимах тягового двигателя, широкие пределы изменения нагрузки и частоты вращения якоря, особенно при нарушении условий сцепления колес с рельсами, ограниченные габариты размещения при ширине колеи 1520 мм и диаметре колес 1250 мм наряду с указанными выше особенностями работы электровоза необходимо учитывать при проектировании, изготовлении и эксплуатации тяговых электрических машин.
Наиболее полно этим требованиям удовлетворяют тяговые двигатели постоянного тока последовательного возбуждения, допускающие большие перегрузки и устойчиво работающие при резких колебаниях напряжения в контактной сети. Кроме того, при двигателях с последовательным возбуждением обеспечивается незначительное расхождение нагрузок в параллельных цепях. Поэтому подавляющее большинство современных тяговых двигателей постоянного тока, в том числе и на электровозе ЧС2Т, имеет последовательное возбуждение.
Основные технические данные тягового двигателя АЕ4846с1Т, установленного на электровозе ЧС2Т, следующие (для сравнения
приведены также данные тягового двигателя АЬ4846еТ эл воза ЧС2):
Мощность, кВт . . •. •. 770 700
Ток якоря, А. 545 495
Частота вращения якоря, об/мин. 665 680
Мощность, кВт . 68« 618
Ток якоря, А. 480 435
Частота вращения якоря, об/ыпн . 705 720
Максимальная частота вращения якоря, об/мин . 1230 1230
Номинальное напряжение на коллекторе, В . . 1500 1500
Количество охлаждающего воздуха, м3/с . . . 2,0 2,0
Масса двигателя, кг. 5250 5250
Сопротивление обмоток при 20°С. Ом:
якоря . 0,032 0,0362
дополнительных полюсов. 0,0127 0,0139
главных полюсов. 0,0232 0,0269
обмоток якоря . В В
катушек главных и дополнительных полюсов . Р р
При напряжении на коллекторе 1500 В изоляция между то-коведущими частями двигателя и корпусом рассчитана на напряжение контактной сети, т. с. на 3000 В. При испытаниях изоляция обмоток тягового двигателя должна выдержать напряжение 9400 В в течение 1 мни.
Как следует из приведенных данных, мощность тягового двигателя электровоза ЧС2Т на 10% превышает мощность тягового двигателя, установленного на электровозе ЧС2. Необходимость повышения мощности вызвана требованиями эксплуатации, прежде всего увеличением числа вагонов скоростных экспрессов с максимальной скоростью движения 160 км/ч. Как известно, число Вагонов поезда «Аврора» на линии Москва—Ленинград при электровозе ЧС2 не может быть больше десяти по условиям нагревания тяговых двигателей. Использование электровозов ЧС2Т позволяет, как показали испытания, увеличить число вагонов до 12.
Повышение мощности двигателя достигнуто практически без изменения конструкции машины путем некоторого увеличения сечения меди обмоток якоря и катушек полюсов. Однако при этом размеры паза не изменены, уменьшена толщина изоляции, благодаря чему улучшен отвод тепла от обмоток к сердечнику.
Отличительной особенностью тягового двигателя АЬ4846с1Т является применение шихтованных вставок между сердечниками полюсов и корпусом остова; выполнение сердечника дополнительного полюса из листовой стали и установка диамагнитных прокладок под сердечник дополнительного полюса. Все это спо-
собствует повышению коммутационной устойчивости тяговых двигателей при неустановившихся режимах. Учитывая, что для надежной работы тяговых машин коммутация при переходных режимах имеет решающее значение, а также то, что шихтованные вставки впервые применены на тяговых двигателях постоянного тока, рассмотрим подробнее работу двигателей в этих режимах.
Основной магнитный поток Ф, создаваемый обмотками главных полюсов, при установившемся режиме зависит от магнитодвижущей силы, которая при последовательном возбуждении прямо пропорциональна току якоря. В переходных режимах, вызываемых резкими колебаниями напряжения в сети, нарушением и восстановлением контакта токоприемника с проводом, прекращением боксования, переключениями в схеме и т. д., происходит изменение тока и соответственно потока. Как известно, изменяющийся магнитный поток, пронизывающий магпнтопровод, индуктирует в нем электродвижущую силу (э. д. с), которая вызывает вихревые токи. Последние стремятся воспрепятствовать изменениям, которые их вызывают. Следовательно, собственное поле вихревых токов старается ослабить изменение основного магнитного поля, что при переходном режиме проявляется в размагничивающем действии вихревых токов. В тяговом двигателе это вызывает запаздывание изменения магнитного потока относительно изменения тока, что сопровождается броском тока, в ряде случаев значительно превышающим установившееся значение. Коммутация двигателей осложняется из-за бросков тока и вследствие влияния вихревых токов па поток дополнительных полюсов.
Магнитное поле дополнительных полюсов, через катушки которых протекает ток двигателя, должно компенсировать магнитное поле коммутируемой секции якоря. В случае равенства э. д. с, наводимой в короткозамкнутой секции магнитным потоком дополнительных полюсов, и реактивной э. д. с. в той же секции плотность тока иод щеткой распределяется равномерно и обеспечиваются наиболее благоприятные условия коммутации.
Значение реактивной э. д. с. в короткозамкнутой секции якоря определяется нагрузкой двигателя и изменяется пропорционально току, т. е. в переходных режимах возрастает. Однако поток дополнительного полюса и, следовательно, коммутирующая э. д. с. в этом случае отстают по времени от тока, в результате чего возникает некомпенсированная э. д. с, приводящая к вспышке под щетками. Запаздывание магнитного потока дополнительных полюсов при неустановившемся режиме вызывается действием вихревых токов в магнитопроводе аналогично рассмотренному случаю для потока главных полюсов.
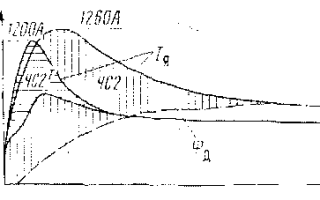
Рассмотрим осциллограмму тока якоря /я и магнитного потока Фд дополнительного полюса двигателя АЬ4846еТ при восстановлении напряжения через 0,87с после внезапного его снятия (рис. 31). Масштабы тока и потока во время опыта были подобраны таким образом, чтобы в установившемся режиме их ординаты совпадали. В другом масштабе кривые тока и потока пред-

Рис. 31. Осциллограмма переходных процессов в тяговом двигателе при потере—восстановлении напряжения
ставляют собой изменение во времени соответственно реактивной и коммутирующей э. д. с. Разность между ними определяет некомпенсированную э. д. с. Опыт потери — восстановления напряжения 1500 В на двигателе (3000 В в сети) проведен при часовом токе 495 А, полном возбуждении и частоте вращения 694 об/мии. Как видно из
рис. 31, ток достиг 1260 А, что в 2,55 раза превышает установившееся значение. Поток дополнительного полюса значительно отстает от тока, вызывая существенную недокомпеисапию реактивной э. д. с. и соответственно вспышку под щеткой.
Аналогичный опыт с двигателем АЬ4846с1Т электровоза ЧС2Т, имеющим шихтованные вставки и диамагнитную прокладку для дополнительного полюса, проведен при часовом токе этого двигателя 545 А (см. рис. 31). При восстановлении напряжения ток в 2,2 раза превысил установившееся значение (1200 А), а главное — переходной процесс закончился быстрее, недокомпепсиро-ванная э. д. с. при этом существенно меньше, что улучшает коммутацию: вспышка под щеткой имеет меньшую интенсивность.
Снижение вероятности появления вспышки под щеткой повышает коммутационную устойчивость двигателя против возможного перекрытия (переброса) на коллекторе между двумя щеткодержателями и возникновения кругового огня.
Увеличение мощности и некоторые изменения в конструкции двигателя АЬ4846оТ, обеспечивающие повышение его коммутационной устойчивости при переходных режимах, не привели к изменению электромеханических характеристик. Изменены лишь номинальные параметры двигателя — сила тяги и частота вращения часового и продолжительного режимов: сила тяги увеличена на 12% при снижении частоты вращения на 2%.
Сила тяги и тяговые характеристики локомотивов — Характеристики тяговых электродвигателей постоянного тока
Содержание материала
- Сила тяги и тяговые характеристики локомотивов
- Сцепление ведущих колес локомотива с рельсами
- Физическая природа сцепления ведущих колес локомотива с рельсами
- Коэффициент сцепления и методы его оценки
- Тяговая характеристика автономного локомотива
- Тяговые свойства тепловозного дизеля
- Характеристики электрических передач тепловозов
- Построение тяговой характеристики тепловоза по характеристикам электродвигателей
- Опытные тяговые характеристики тепловозов с электрической передачей
- Опыт создания тепловозов с электрической передачей переменного тока
- Тяговые характеристики тепловозов с гидравлической передачей
- Опытные тяговые характеристики тепловозов с гидравлической передачей
- Тяговые характеристики тепловозов с механической передачей
- Характеристики тяговых электродвигателей постоянного тока
- Регулирование скорости движения и тяговые характеристики эпс постоянного тока
- Тяговые характеристики элекроподвижного состава постоянного тока
- Характеристики электроподвижного состава переменно-постоянного тока
- Тяговые свойства электровозов с бесколлекторными электродвигателями
Тяговые характеристики электроподвижного состава
Характеристики тяговых электродвигателей постоянного тока электроподвижного состава
На электровозах и электропоездах постоянного и переменно-постоянного тока применяют тяговые электродвигатели постоянного тока. Форма тяговых характеристик электроподвижного состава (э.п.с.), в основном, определяется электромеханическими характеристиками тяговых электродвигателей (ТЭД), приведенных к валу двигателя, а именно: nд =f(Iд) — частоты вращения якоря ТЭД от его тока при заданном напряжении питания от контактной сети UKC; Мд =f(I ) — вращающего момента на якоре ТЭД от тока; ηд = f(Iд) — к.п.д. тягового электродвигателя от тока якоря. Электромеханические характеристики тяговых электродвигателей э.п.с. получают при стендовых испытаниях на заводе-изготовителе.
При тяговых расчетах электромеханические характеристики тягового электродвигателя обычно приводят к ободу колес колесной пары электровозов и электропоездов и получают электромеханические характеристики колесно-моторного блока [5]:
V=f(Iд) — скорости движения колесной пары э.п.с. от тока якоря ТЭД;
F = f(Iд) — касательной силы тяги колесной пары э.п.с. от тока якоря ТЭД; ηэ=f(Iд)- К.П.Д. колесно-моторного блока э.п.с. от тока якоря ТЭД.
При пересчете электромеханических характеристик тяговых электродвигателей на характеристики колесно-моторных блоков используют следующие формулы:
- скорость движения колесной пары э.п.с., км/ч:
 (2.34)
(2.34)
где С — постоянный коэффициент для данной серии локомотива: 
где С8 — конструктивная постоянная тягового электродвигателя; μ — передаточное число тяговых редукторов колесной пары; DK — диаметр колес колесной пары, м;
- касательная сила тяги на ободе колес колесной пары, Н:
 (2.35)
(2.35)
где ΔF — потери силы тяги, вызванные магнитными и механическими потерями в колесно-моторном блоке, Н: 
где ΔΡΜaгн — потери мощности в магнитной системе ТЭД, кВт; ∆Рмех — механические потери мощности в якорных подшипниках и щеточном аппарате ТЭД, кВт; ∆Р — потери мощности в тяговых редукторах колесной пары и моторно-осевых подшипниках ТЭД, кВт; V — скорость движения, км/ч;
- коэффициент полезного действия колесно-моторного блока э.п.с.

где Δρπ — потери в тяговых редукторах и моторно-осевых подшипниках в процентах от подведенной мощности, %. Величина Δρπ определяется по графикам Δρπ = f(Р1) [12].
Необходимо отметить, что форма электромеханических характеристик тяговых электродвигателей и колесно-моторных блоков э.п.с. напрямую зависит от принятой системы возбуждения двигателей.
На рис. 37 представлены схемы основных систем возбуждения тяговых электродвигателей э.п.с.: последовательного (рис. 37, а), параллельного (рис. 37, б), смешанного возбуждения при согласном (рис. 37, в) и встречном (рис. 37, г) включении последовательной и параллельной обмоток и независимого возбуждения (рис. 37, б). Расчетные тяговые характеристики электровозов стяговыми электродвигателями, имеющими вышеперечисленные системы возбуждения, приведены на рис. 38. Из кривых FK =f(V), представленных на рис. 38, следует, что тяговая характеристика электровоза с двигателями последовательного возбуждения (кривая 1) наиболее приближена к идеальной тяговой характеристике локомотива с электрическим приводом колесных пар (кривая 4) и позволяет наиболее полно использовать мощность тягового электродвигателя в эксплуатации. Тем не менее в зоне малых скоростей движения электровоза, когда тяговые электродвигатели работают при больших токах якоря /д, наблюдается увеличение жесткости характеристик локомотива. Жесткость характеристик электродвигателей и электровоза в целом определяется темпом изменения силы тяги FK от скорости V. Тяговые характеристики локомотивов называют жесткими при резком изменении функции FK=f(V) (например, кривая 2 на рис. 38) и мягкими при плавном изменении кривой FK=f(V).
В свою очередь, тяговые характеристики электровозов с электродвигателями параллельного, смешанного и независимого возбуждения имеют более высокую степень жесткости, чем при последовательном возбуждении.
Вышеперечисленные системы возбуждения тяговых электродвигателей обладают целым рядом достоинств и недостатков и нашли практическое применение на различных сериях электровозов.
Так, для электровозов постоянного тока с контакторно-реостатным управлением признано целесообразным [5] применение тяговых электродвигателей с системами последовательного или смешанного возбуждения с мягкими тяговыми характеристиками.
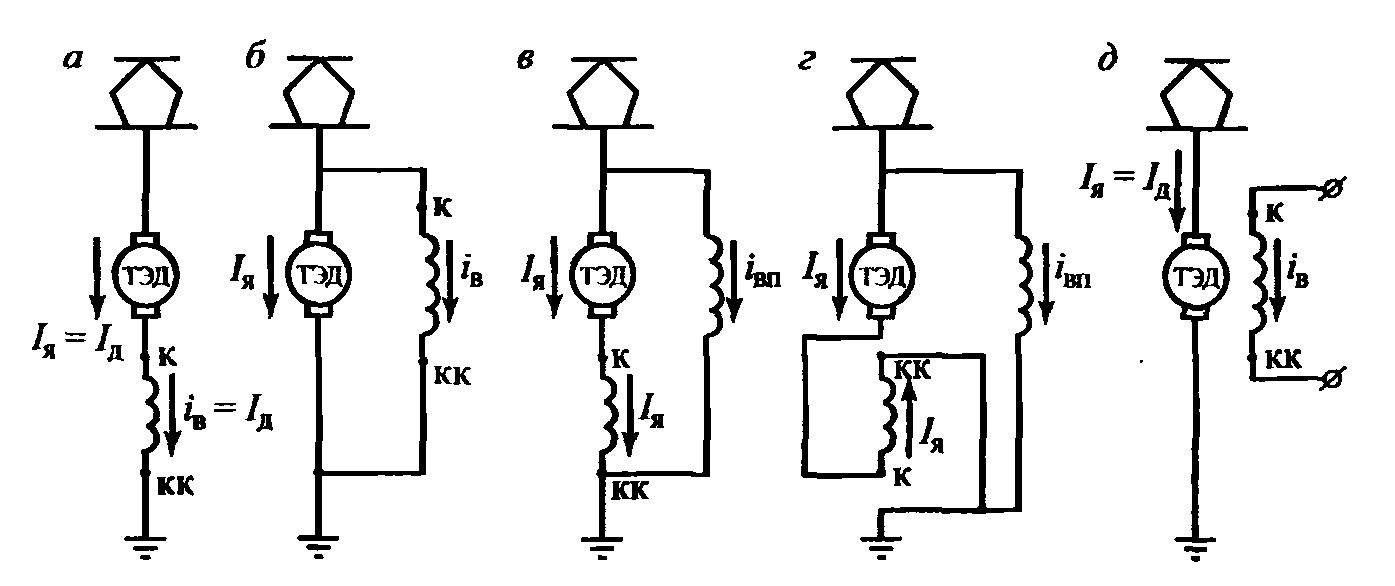
Рис. 37. Схемы систем возбуждения тяговых электродвигателей электроподвижного состава: а — последовательного; б — параллельного; в — смешанного при согласном включении обмоток; г — смешанного при встречном включении обмоток; д — независимого возбуждения

Рис. 38. Расчетные тяговые характеристики электровозов с электродвигателями, имеющими разные системы возбуждения: 1 — при последовательном; 2 — при параллельном и независимом; 3 — при смешанном; 4 — идеальная характеристика
На электровозах переменно-постоянного тока и э.п.с. постоянного тока с импульсным регулированием предпочтительнее оказалось использование тяговых двигателей с независимым возбуждением и
жесткими характеристиками. Такие характеристики тяговых электродвигателей позволяют уменьшить интенсивность процессов боксования локомотива и, соответственно, увеличить критические веса водимых поездов. Широкое применение силовых полупроводников на э.п.с. позволяет несколько сгладить серьезные недостатки независимого возбуждения ТЭД — сильный разброс токов нагрузки между параллельно работающими ТЭД локомотива и чувствительность к колебаниям напряжения в контактной сети.
Сравнительные испытания электровозов ВЛ80р с последовательным возбуждением тяговых электродвигателей и ВЛ80Р с независимым возбуждением с поездами, проведенные ВНИИЖТом [7,8], показали, что коэффициент тяги электровозов ВЛ80рн на 8,4 % выше, чем ВЛ80р; во время разгона, т.е. в диапазоне высоких токовых нагрузок жесткость тяговых характеристик электровозов ВЛ80РН и ВЛ80р сближается и их тяговые возможности почти не отличаются.
ТЯГОВЫЕ ХАРАТЕРИСТИКИ ЭЛЕКТРОВОЗОВ ВЛ10 В РЕЖИМЕ УСИЛЕННОГО ВОЗБУЖДЕНИЯ
- Елена Веселова 3 лет назад Просмотров:
1 УДК А. С. Мазнёв, В. А. Баранов, А. А. Богдан ТЯГОВЫЕ ХАРАТЕРИСТИКИ ЭЛЕКТРОВОЗОВ ВЛ10 В РЕЖИМЕ УСИЛЕННОГО ВОЗБУЖДЕНИЯ Рассмотрены способы и схемные решения увеличения жесткости тяговых характеристик. Приведены результаты выполненных испытаний опытного электровоза. тяговый двигатель, регулирование возбуждения, электромеханические характеристики. Введение Электровозы серии ВЛ10 и ВЛ10У эксплуатируются в ОАО «Апатит» на участках, имеющих уклоны до 0,030, кривые малого радиуса, а также кривые, расположенные на уклонах. Скорость движения составляет не более 40 км/ч, а на отдельных участках не более 25 км/ч. Поезда состоят из 25 думпкаров весом 1250 т и 3875 т (порожний и груженый составы соответственно). Условия эксплуатации требуют использования двойной тяги или подталкивающих локомотивов, что приводит к дополнительным затратам на перевозочный процесс. При следовании по указанным подъемам развиваемая сила тяги локомотива приближается к ограничению по сцеплению, что вызывает боксование колесных пар, развитию которого способствуют достаточно мягкие характеристики тяговых двигателей ТЛ-2К1 последовательного возбуждения. Предупреждение срыва сцепления или быстрое прекращение боксования с целью реализации максимальной по условиям сцепления силы тяги возможно за счет повышения жесткости тяговых характеристик. 1 Способы увеличения жесткости характеристик тяговых двигателей Под жесткостью тяговой характеристики двигателя понимают величину изменения касательной силы тяги при изменении скорости движения локомотива (боксование колесных пар отсутствует). Численно жесткость тяговой характеристики оценивается коэффициентом DF c=, D V где D F изменение касательной силы тяги, соответствующее изменению скорости на величину D V. 1.1 Подпитка обмоток возбуждения от преобразователя
2 В этом случае реализуется последовательно-независимое возбуждение тяговых двигателей. При постоянном выходном напряжении преобразователя, питающего обмотки возбуждения, в случае срыва сцепления колеса с рельсом ток в обмотках возбуждения практически не изменится, несмотря на увеличение частоты вращения якоря двигателя. Таким образом, жесткость тяговых характеристик приближается к жесткости характеристик двигателей независимого возбуждения. На рисунке изображена схема включения тяговых двигателей одной секции электровоза при подпитке обмоток возбуждения от электромашинного преобразователя при параллельном их соединении. Рис. 1. Схема силовой цепи секции электровоза при подпитке обмоток возбуждения тяговых двигателей при параллельном их соединении 1.2 Применение независимого возбуждения тяговых двигателей Для увеличения жесткости тяговой характеристики наилучшим способом является применение независимого возбуждения двигателей. Коэффициент жесткости тяговой характеристики при независимом возбуждении практически одинаков для всех значений силы тяги и равен около 700 кгс/(км/ч). Однако в этом случае из-за расхождения характеристик двигателей и диаметров бандажей колесных пар происходит неравномерное распределение токов по параллельным ветвям якорей и возникает необходимость их выравнивания. 1.3 Применение схемы смешанного соединения обмоток якорей и возбуждения
3 В случае последовательного возбуждения коэффициент жесткости возрастает с увеличением насыщения магнитной системы машины, т. к. при этом зависимость интенсивности изменения основного магнитного потока от тока возбуждения уменьшается. Таким образом, необходимо в зоне малых токов якоря увеличить ток возбуждения. Для этого возможно применение при последовательно-параллельном и параллельном соединениях тяговых двигателей схемы смешанного включения обмоток якорей и возбуждения, приведенных на рисунках 2 и 3 соответственно. Рис. 2. Схема силовой цепи секции электровоза при последовательно-параллельном соединении тяговых двигателей Рис. 3. Схема силовой цепи секции электровоза при параллельном соединении тяговых двигателей Данная схема позволяет увеличить ток возбуждения по сравнению с током якоря в два раза. Для регулирования тока обмоток возбуждения двигателей используются шунтирующие обмотки возбуждения цепи, в качестве которых можно использовать штатные цепи ослабления возбуждения.
4 Ток через обмотки возбуждения определяется по формуле: I о.в 2Iя Rш = R + 4R ш о.в, где I я ток якоря; R ш сопротивление шунтирующей обмотки возбуждения цепи; R о.в сопротивление цепи обмоток возбуждения. На рисунке 4 приведена зависимость магнитного потока главных полюсов двигателя от тока якоря для разных позиций регулирования возбуждения. СФ, В/км/ч Рис. 4. Характеристика возбуждения: 1 первая ступень регулирования возбуждения; 2 вторая ступень регулирования возбуждения; 3 третья ступень регулирования возбуждения; 4 режим нормального возбуждения I, А
5 Скорость движения электровоза при работе на параллельном соединении ТЭД в режиме усиленного возбуждения током якорей определяется по формуле: V U- I 2R — I 4R =, я я в о.в 2СФ V где U напряжение контактной сети; I я ток якоря; R я сопротивление цепи якоря, состоящей из якорной и компенсационной обмоток, включенных последовательно; I в ток возбуждения; R о.в сопротивление обмотки возбуждения. На рисунке 5 приведены скоростные характеристики электровоза при работе в режиме усиленного возбуждения. V, км/ч Рис. 5. Скоростная характеристика электровоза в режиме усиленного возбуждения током якорей: I первая ступень регулирования возбуждения; II вторая ступень регулирования возбуждения; III третья ступень регулирования возбуждения; IV режим нормального возбуждения На рисунке 6 приведены тяговые характеристики электровоза при работе в режиме усиленного возбуждения. I, А
6 F, кгс V, км/ч Рис. 6. Тяговая характеристика электровоза в режиме усиленного возбуждения током якорей: I первая ступень регулирования возбуждения; II вторая ступень регулирования возбуждения; III третья ступень регулирования возбуждения; IV режим нормального возбуждения 2 Результаты проведенных испытаний электровоза Все перечисленные выше схемы были смонтированы и проверены в эксплуатации на опытном электровозе ВЛ10У-580. Предварительно электровоз был оборудован диодным способом перегруппировки ТЭД с одного соединения на другое и дополнительными индивидуальными контакторами, дающими возможность перегруппировывать обмотки возбуждения под током. Значения токов в силовой цепи электровоза измерялись при помощи датчиков и фиксировались на компьютере. Опытная проверка дала следующие результаты. 1. Подпитка обмоток возбуждения от возбудителя на СП-соединении двигателей имеет низкую эффективность, что связано с его низким выходным напряжением. Эффективность подпитки можно повысить за счет последовательного соединения генераторов возбудителей обеих секций или применения статических преобразователей. 2. Подпитка обмоток возбуждения током якорей смежной параллельной ветви приводит к улучшению противобоксовочных свойств и дает возможность понизить расчетную скорость при увеличении силы тяги. 3. Расхождение токов групп параллельных ветвей обмоток якорей не превышает А. Наряду с определенными преимуществами все схемы обладают и некоторыми недостатками.
7 1. Необходима перегруппировка обмоток возбуждения таким образом, чтобы обмотки возбуждения всех двигателей каждой секции были соединены между собой последовательно. 2. Данная схема не предусматривает применение режима рекуперативного торможения. 3 Применение импульсного регулирования Возможности контакторно-реостатной системы регулирования ограничены и не позволяют улучшить использование тяговых свойств электроподвижного состава. Полупроводниковые преобразователи постояннопостоянного тока дают возможность совершенствовать структуру и качественные показатели электровозов постоянного тока. Известно, что количество преобразователей определяется числом параллельных ветвей тяговых двигателей ЭПС. Некоторые схемные решения отличаются уменьшенным числом преобразователей. Представленная на рисунке 7 схема силовой цепи электровоза ВЛ10 с одним преобразователем на каждую секцию дает возможность осуществлять импульсный пуск на последовательно-параллельном и параллельном соединениях двигателей. Последовательное соединение всех восьми двигателей не используется. Т КВ VD1 Н VD2 ТИП В Н1 В2 VD01 3 VD02 Рис. 7. Схема силовой цепи электровоза ВЛ10 с одним преобразователем на каждую секцию Перегруппировка тяговых двигателей с последовательнопараллельного соединения на параллельное происходит в такой последовательности: 1) уменьшается коэффициент заполнения преобразователя до 0,5, напряжение на двигателях снижается в 2 раза; 2) синхронно включаются контакторы 1 и 2.
8 После выхода на автоматическую характеристику возможен перевод тяговых двигателей на независимое возбуждение, что обеспечивают контакторы КВ, 3 и разделительный диод VD2. Контакторы 1, 2 и диод VD1 предназначены для перегруппировки тяговых двигателей с одного соединения на другое диодным способом. Применение импульсного преобразователя позволяет отказаться от групповых переключателей, электропневматических контакторов, индуктивных шунтов и пусковых резисторов с массой около 8,5 тонн. Заключение Анализируя полученные результаты, можно сделать вывод о целесообразности применения подпитки обмоток возбуждения от статического преобразователя или током якорей смежной ветви на параллельном соединении ТЭД. Применение дополнительной подпитки обмоток возбуждения током якорей или независимое возбуждение позволяет увеличить жесткость тяговых характеристик, что дает возможность реализовывать повышенные значения силы тяги и улучшить противобоксовочные свойства электровозов. Библиографический список 1. Независимое возбуждение тяговых двигателей электровозов / А. Т. Головатый, И. П. Исаев, Е. В. Горчаков. М.: Транспорт, с. 2. Правила тяговых расчетов для поездной работы. М.: Транспорт, УДК : Д. В. Фёдоров ДИАГНОСТИКА ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ НА ОСНОВЕ АНАЛИЗА СПЕКТРА ПОТРЕБЛЯЕМОГО ТОКА Рассмотрен комплекс вопросов по оценке состояния и диагностированию электрической и механической части электродвигателей на основе обработки результатов мониторинга потребляемого тока и приложенного напряжения. диагностика, тяговые электрические двигатели, спектр, дефекты. Введение В настоящее время электрические двигатели переменного тока являются крупнейшими потребителями электрической энергии. Согласно последним исследованиям, они потребляют свыше 80% вырабатываемой
Рассмотрены способы улучшения тяговых свойств электровозов постоянного тока. Приведены результаты испытаний опытного электровоза.
 Транспортное, промышленное и гражданское строительство 65 3. Задание сейсмического воздействия. Взгляд инженера-строителя / А. М. Уздин // Сейсмостойкое строительство. Безопасность сооружений. 2005. 1.
Транспортное, промышленное и гражданское строительство 65 3. Задание сейсмического воздействия. Взгляд инженера-строителя / А. М. Уздин // Сейсмостойкое строительство. Безопасность сооружений. 2005. 1.
Характеристики тяговых двигателей
Работа тяговых двигателей характеризуется зависимостями частоты вращения якоря п, вращающего момента Мд и коэффициента полезного действия Цд от тока I, протекающего в цепи обмотки якоря. Эти зависимости называют электромеханическими характеристиками.
При пуске подвижного состава тяговый двигатель подключается к контактной сети и к нему подводится напряжение
?/д = ? + /гд, (1)
где Е — э. д. с. Вращения якоря, В;
I — ток обмотки якоря, А;
гд — суммарное сопротивление обмоток двигателя (якоря, главных и добавочных полюсов). Ом.
Мощность, подводимая к двигателю РЭ=ПД/, меньше полезной мощности на валу Рд на потери в двигателе 2Рд
где 2РД включают в себя электрические, магнитные, механические и добавочные потери в двигателе, Вт; цд-к. п. д. двигателя.

Рис. 2. Электромеханические характеристики тяговых двигателей: а — ДК-210А-3; б — ДК-211А; в — ДК-2ИБ; г- ДК-259Г-3



Рис. 3. Электромеханические характеристики тяговых двигателей:
а — ДК-259Д-3; б — ДК-26ІА; в — ТЕ-022
На рис. 2 и 3 приведены электромеханические характеристики, приведенные к ободу ведущего колеса, некоторых типов тяговых двигателей для троллейбусов и трамвайных вагонов. Указанные характеристики изображены без учета к. п. д. в зубчатой передаче, так как при проектировании двигателя не учитывают тип, конструкцию и параметры редуктора.
Электрооборудование трамваев и троллейбусов
- Общие сведения и технические характеристики электрических машин постоянного тока
- Характеристики тяговых двигателей
- Конструкция электродвигателей
- Вспомогательные электрические машины на напряжение 550 В
- Вспомогательные электрические машины на напряжение 24 и 12 В
- Генераторы собственных нужд
- Обслуживание электрических машин
- Характеристики токоприемников
- Конструкция токоприемников и их обслуживание
- Пускотормозные реостаты
- Регулировочные реостаты и индуктивные шунты
- Контактные соединения, контактные материалы
- Способы гашения электрической дуги
- Расчет обмоток электромагнита
- Электромагнитные контакторы
- Устройство и компоновка контакторных панелей
- Групповые аппараты
- Контроллеры косвенного управления подвижным составом
- Групповые реостатные контроллеры
- Ускоритель вагона Т-3
- Реверсивные переключатели
- Отключатели тяговых двигателей
- Реле автоматического пуска и торможения
- Реле управления
- Аппараты токовой защиты
- Аппараты защиты по напряжению
- Аппараты защиты от атмосферных перенапряжений
- Защита радиоприема от помех, вызываемых электрическим оборудованием подвижного состава
- Характеристика систем управления
- Регулирование напряжения на тяговых двигателях при реостатном пуске
- Регулирование возбуждения тяговых двигателей при пуске
- Электрическое торможение
- Тормозные характеристики и схемы реостатного торможения
- Электрическая схема троллейбуса 9Тр
- Электрическая схема троллейбуса ЗиУ-9
- Электрическая схема вагона РВЗ-6М-2
- Электрическая схема вагона КТМ-5М-3
- Электрическая схема вагона Т-3
- Импульсное управление на электрическом подвижном составе
- Импульсное регулирование напряжения на тяговых двигателях при пуске
- Импульсное регулирование напряжения на тяговых двигателях при торможении
- Тиристорно-импульсное регулирование возбуждения тяговых двигателей
- Сглаживающие устройства в системах с тиристорно-импульсным управлением
- Схемы тиристорных прерывателей
- Защита силовых полупроводниковых приборов в тиристорных регуляторах
- Принципы построения схем управления тиристорных регуляторов
- Конструкция электрооборудования
- Электрические схемы вагона РВЗ-7 с тиристорно-импульсным управлением
- Электрическая схема электронного блока управления вагона РВЗ-7
- Электрические цепи напряжением 550 В
- Аккумуляторные батареи
- Реле-регуляторы
- Схемы вспомогательных цепей напряжением 24 и 12 В троллейбусов и трамваев
- Список литературы
Электродинамический тормоз электровозов ЧС2 Т и ЧС200
Рассмотрены устройство и работа основного электронного оборудования, применяемого в электродинамическом (реостатном) тормозе системы «Шкода». Применительно к электродинамическому тормозу электровозов ЧС2 Т и его модификации на скоростном электровозе ЧС200