Электронная схема управления асинхронным двигателем
Электронная схема управления асинхронным двигателем
В настоящее время практически 60 % всей вырабатываемой электроэнергии потребляется электродвигателями. Поэтому достаточно остро стоит задача экономии электроэнергии и уменьшения стоимости электродвигателей. Трехфазные асинхронные двигатели считаются достаточно универсальными и наиболее дешевыми, но в то же самое время подключать их к однофазной сети и управлять частотой вращения достаточно сложно.
Заманчива перспектива, увеличения номинальной частоты вращения двигателя, в двое и более раз или использование малогабаритных двигателей рассчитанных на частоту питающей сети 400-1000 Гц и имеющие меньшую массу и стоимость. В данной радиолюбительской конструкции предпринята попытка решения проблемы.
Предлагаемая система управления работает от однофазной сети 220вольт и позволяет плавно менять обороты двигателя и отображать частоту инвертора на двухразрядном цифровом индикаторе. Дискретность изменения частоты инвертора составляет 1 Гц и регулируется в пределах от 1 до 99 Гц. В предлагаемой схеме используется числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц позволяющий получать синусоидальный ток на обмотках двигателя.
Существует также более перспективный, Широтно Импульсный Метод (ШИМ, PWM — англ.) использующий управление с обратными связями и без них. С частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15-27% по сравнению с питающей сетью т.е. до 354-390 вольт.
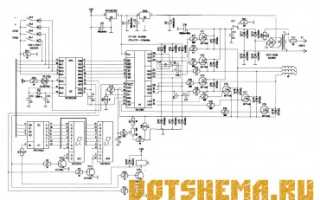
Схема, изображённая на рисугке выше, состоит из управляющего устройства D2, применен микроконтроллер PIC16F628-20/P работающий на частоте 20 мГц, кнопок управления Пуск (SA1), Стоп (SA2), кнопки увеличения и уменьшения частоты соответственно SA3.SA4. Двоично-семисегментного дешифратора D1, светодиодных матриц HG1,HG2. Узла торможения VT9,VT10,K1.
В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы INTERNATIONAL RECTIFIER имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления. Данная микросхема имеет систему защиты по току которая в случае перегрузки выключает все ключи а также предотвращает одновременное открывание верхних и нижних транзисторов и тем самым предотвращает протекание сквозных токов.
Для сброса защиты необходимо установить все единицы на входах HNx, LNx. В качестве силовых ключей применены МОП транзисторы IRF740. Цепь перегрузки состоит из датчика тока R10 делителя напряжения R7-R9 позволяющего точно установить ток срабатывания защиты, и интегрирующей цепочки R6-C3 которая предотвращает ложное срабатывание токовой защиты в моменты коммутаций.
Напряжение срабатывания защиты составляет 0,5 вольт по входу ITRP (D4). После срабатывания защиты на выходе FAULT (открытый коллектор) появляется логический ноль, зажигается светодиод HL1, и закрываются все силовые ключи. Для более быстрой разрядки емкостей затворов силовых транзисторов можно установить параллельно резисторам, вклюценным в цепь затвора, диодов в обратном направлении. Двигатель необходимо включить по схеме звезды.
Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости СЮ, емкость С11 предотвращает всплески, которые будут возникать при коммутациях на паразитных индуктивностях схемы. А также маломощного трансформатора Т1, стабилизатора напряжения 15 вольт D5 для питания схемы драйвера, и стабилизатора напряжения 5 вольт D3 для питания микроконтроллера и схемы индикации.
При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT транзисторы типа IRGBC20KD2-S, IRGBC30KD2-S при этом диоды VD7-VD10, VD15.VD16 следует выпаять. Конденсатор С11 должен быть типа К78-2 на 600-1000 Вольт. Вместо VD1-VD6 желательно применить сверх быстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2-4,7 микрофарад, которые должны быть рассчитаны на напряжение 50 вольт.
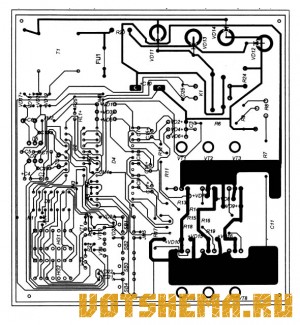
Трансформатор Т1 мощностью 0,5-2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом диаметром 0,2 и должна выдавать 19-20 вольт. Печатная плата выполнена на одностороннем стеклотекстолите, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1.HG2, кнопки SA1-SA4 установлены со стороны дорожек.
HEX формат программы находится в табл. 1. В момент записи в нулевую ячейку ОЗУ необходимо поместить шестнадцатеричное число от 1 до 63, начальная частота инвертора.
Программа выполнена таким образом что двигатель стартует с плавным набором скорости от 0 до установленной частоты примерно за 2 секунды, эта константа находится в ячейках 0207 и 0158 таблицы. Если необходимо увеличить скорость нарастания в два раза то вместо кодов 3005 необходимо записать 300А.
HEX данные: 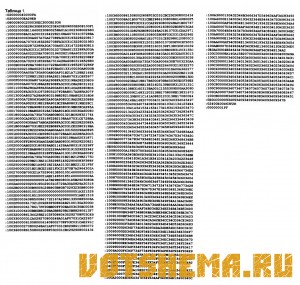
Микроконтроллерная система управления асинхронным трехфазным двигателем
В настоящее время практически 60% всей вырабатываемой электроэнергии потребляется электродвигателями. Поэтому достаточно остро стоит задача экономии электроэнергии и уменьшения стоимости электродвигателей.
Трехфазные асинхронные двигатели считаются достаточно универсальными и наиболее дешевыми, но подключать их к однофазной сети и управлять частотой вращения достаточно сложно.

Рис. 1. Числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц.
Заманчива перспектива увеличения номинальной частоты вращения двигателя в двое и более раз или использование малогабаритных двигателей, рассчитанных на частоту питающей сети 400. 1000 Гц и имеющихменьшую массу и стоимость. В данной радиолюбительской конструкции предпринята попытка решения проблемы.
Предлагаемая система управления работает от однофазной сети 220 В и позволяет плавно менять обороты двигателя и отображать частоту инвертора на двухразрядном цифровом индикаторе.
Дискретность изменения частоты инвертора составляет 1 Гц и регулируется в пределах от 1 до 99 Гц. В предлагаемой схеме используется числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц (рис.1), позволяющий получать синусоидальный ток на обмотках двигателя.
Существует более перспективный, широтно-импульсный метод (ШИМ, PWM — англ.), использующий управление с обратными связями и без них, с частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15.27% по сравнению с питающей сетью, т.е. до 354.390 В.
Принципиальная схема
Схема, показанная на рис.2, состоит из: управляющего устройства D2 (применен микроконтроллер PIC16F628-20/P, работающий на частоте 20 МГц), кнопок управления «Пуск» (SA1), «Стоп» (SA2), кнопок увеличения и уменьшения частоты SA3 и SA4 соответственно, двоично-семисегментного дешифратора D1, светодиодных матриц HG1 и HG2, узла торможения VT9, VT10, K1.
В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы International Rectifier, имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления.

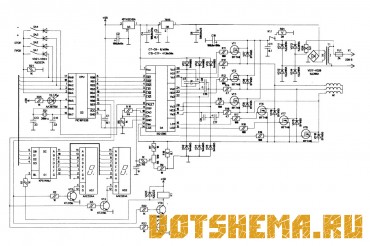
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем.

Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем (продолжение).
Данная микросхема имеет систему защиты по току, которая в случае перегрузки выключает все ключи, а также предотвращает одновременное открывание верхних и нижних транзисторов, тем самым предотвращает протекание сквозных токов. Для сброса защиты необходимо установить все единицы на входах HNx, LNx. В качестве силовых ключей применены МОП-транзисторы IRF740.
Цепь перегрузки состоит из датчика тока R10, делителя напряжения R7R9, позволяющего точно установить ток срабатывания защиты, и интегрирующей цепочки R6C3, которая предотвращает ложное срабатывание токовой защиты в моменты коммутаций. Напряжение срабатывания защиты составляет 0,5 В по входу ITRP (D4).
После срабатывания защиты на выходе FAULT (открытый коллектор) появляется лог.»0″, зажигается светодиод HL1 и закрываются все силовые ключи.
Для более быстрой разрядки емкостей затворов силовых транзисторов можно установить параллельно резисторам, включенным в цепь затвора, диоды в обратном направлении. Двигатель необходимо включить по схеме звезды.
Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости C10, емкости C11, предотвращающей всплески, которые возникают при коммутациях на паразитных индуктивностях схемы, а также маломощного трансформатора T1, стабилизатора напряжения 15 В D5 для питания схемы драйвера, стабилизатора напряжения 5 В D3 для питания микроконтроллера и схемы индикации.
При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT-транзисторы типов IRGBC20KD2-S, IRGBC30KD2-S, при этом диоды VD7-VD10, VD15, VD16 следует выпаять. Конденсатор C11 типа К78-2 на напряжение 600. 1000 В. Вместо VD1-VD6 желательно применить сверхбыстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2. 4,7 мкФ, которые должны быть рассчитаны на напряжение 50 В. Трансформатор T1 мощностью 0,5.2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом 00,2 и должна выдавать 19.20 В.
Печатная плата и прошивка МК
Печатная плата (рис.3) выполнена из одностороннего стеклотекстолита, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1, HG2, кнопки SA1-SA4 установлены со стороны дорожек.

Рис. 3. Печатная плата.
HEX-формат программы приведен в таблице. В момент записи в нулевую ячейку ОЗУ необходимо поместить шестнадцатеричное число от 1 до 63, начальная частота инвертора.

Коды для прошивки в текстовом формате: Скачать
Программа выполнена таким образом, что двигатель стартует с плавным набором скорости от 0 до установленной частоты примерно за 2 с (эта константа находится в ячейках 0207 и 0158 таблицы). Если нужно увеличить скорость нарастания в два раза, то вместо кодов 3005 необходимо записать 300A.
С.М. Абрамов, г. Оренбург, Россия. Электрик-2004-08.
- Козаченко В. Основные тенденции развития встроенных систем управления двигателями и требования к микроконтроллерам//СЫр№ш -1999. — №1.
- Обухов Д, Стенин С., Струнин Д, Фрадкин А. — Модуль управления электроприводом на микроконтроллере PIC16C62 и драйвере IR2131//ChipNews. — 1999. -№6.
Схема управления асинхронными трехфазными двигателями
Любой домашний мастер, необязательно хороший электрик, в своем арсенале имеет много универсальных станков и инструментов, использует электрические приборы, работающие от асинхронных двигателей, которыми можно пользоваться на расстоянии в автоматическом режиме.
Местное управление трехфазным двигателем
Рассмотрим на примере 3-х фазной системы алгоритм управления электродвигателем, по которому работает электрическая схема.

От электрического распред щитка мастерской, оборудованного вводными автоматами и рубильниками, посредством силового трехжильного кабеля подводится напряжение на силовые контакты ПМ 13 магнитного пускателя через подключенные токовые обмотки реле ТП.
Все провода фаз необходимо подбирать с учетом передаваемой мощности, которая вызывает нагрев металла. Для наглядности восприятия схемы фазы выделены разными цветами.
Разрывную способность контактов у пускателя следует сочетать с учетом электрической мощности двигателя под максимальной нагрузкой. Эти данные указываются в паспортах на электрическое оборудование и информационных табличках, прикрепленных к корпусу.
Состав приборов и их назначение
Обычная схема управления использует электрические приборы:
• магнитный пускатель;
• токовое тепловое реле класса РТЛ;
• две раздельные либо сдвоенные кнопки с обязательной пружинной конструкцией самовозврата.
Для защиты электродвигателя от перегрузок по току и/или исключения перегрева провода обмоток в силовую цепь через контактные зажимы КРЛ-клеммника подключаются токовые обмотки теплового реле ТП. Диэлектрический прочный корпус устройства прикрепляется непосредственно к магнитному пускателю либо — на Din-рейку. Предусмотрен также старый метод установки “под винт”.
Выпускаемые современные полупроводниковые тепловые реле снабжаются дополнительно такими функциями защиты, как:
• нарушения симметрий токов между фазами, которые создают неравномерную нагрузку на обмотки;
• пропадания напряжения в любой из фаз.
Электрическая схема рассматриваемых твердотельных реле способна выдержать напряжение 600 вольт. У нее реализована возможность регулирования токов несрабатывания защиты для учета мощности применяемого двигателя на номинальные токи в 10, 16 и более ампер.
Алгоритм управления
На схему управления подводится напряжение от одной из фаз и нуля. Нормально замкнутый контакт ТП-1 у теплового реле РТЛ в обычном режиме разрешает работу магнитному пускателю и, соответственно, электродвигателю. Размыкание контакта ТП-1 приводит к обесточиванию обмотки ПМ и отключению контактов ПМ-13, останову электродвигателя.
Запуск схемы происходит замыканием контакта Кн1 от нажатия кнопки “Пуск”, которая подает напряжение на обмотку ПМ. Срабатывающий пускатель замыкает одновременно свои силовые контакты ПМ-13, а в схеме управления его контакт ПМ-4 подключает на удержание обмотку пускателя ПМ. Таким образом предотвращается разрыв цепи обмотки пускателя от действия пружины самовозвратного контакта Кн1.
Двигатель будет работать до разрыва цепи управления одним из способов:
• нажатием кнопки “Стоп”;
• защитным отключением от токового реле перегрузки.
Дистанционное управление трехфазным двигателем
Многим двигателям, установленным на станках, достаточно местного управления. Но отдельным устройствам, наподобие погружных насосов, требуется дистанционное управление, иногда даже с разных мест.
Для этого в электрическую схему управления двигателя достаточно добавить еще одну сдвоенную кнопку (Пуск-д, Стоп-д). Ее следует смонтировать на удаленном рабочем месте и подключить отдельным кабелем или проводами в защитном кожухе.

Контакты “Кн1д” соединяются жилами кабеля по параллельной схеме с одноименными контактами Кн1, а нормально замкнутый контакт “Стоп-д” врезается последовательно с Кн2.
Для этого жилы кабеля на удаленном рабочем месте подсоединяются к кнопке Кн2д и подводятся к кнопке “Стоп”. С любого контакта Кн2 отключают провод от действующей схемы и подключают его (желательно через клеммник) с одним из кончиков кабеля от кнопки дистанционного останова Кн2д. Второй кончик от удаленной кнопки подключают на освободившийся контакт Кн2.
Особенности управления однофазным двигателем
Описанные выше алгоритмы полностью пригодны для работы однофазных устройств. Электрическая схема для их управления упрощается: напряжение к электродвигателю подключается однофазным пускателем через обмотку однофазного токового реле.

Отправить заявку или сообщение Вы можете через форму обратной связи, или позвонить +7 (495) 545-44-32.
Книга: Башенные краны
Навигация: Начало Оглавление | Другие книги | Отзывы:
§ 51. Тиристорная схема управления асинхронным электродвигателем
В связи с увеличением длины канатов крюковой подвески на кранах с большой высотой подъема возникла необходимость в плавном регулировании скорости механизма поворота, поэтому на этих кранах применяют специальные схемы электроприводов. В схеме на рис. 99 механизм поворота приводится асинхронным электродвигателем Ml с фазным ротором, управляемым с помощью тиристоров.
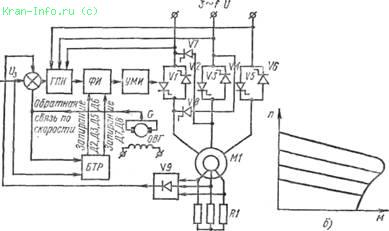
Рис. 99. Электропривод механизма поворота с тиристорным управлением:
а — функциональная электрическая схема, б — механические характеристики привода; ГПН — блок генератора пилообразного напряжения, ФИ — блок формирования импульсов, УМ И — блок усиления мощности импульсов, БТР — блок тормозного режима, ОВГ — обмотка возбуждения тахогенератора; G — тахогенератор, V9 — выпрямитель цепи обратной связи по току, U — задающее напряжение
В приводе использован параметрический способ регулирования скорости, основанный на изменении напряжения, подводимого к статору электродвигателя. Развиваемый электродвигателем вращающий момент пропорционален квадрату подводимого напряжения, поэтому изменение напряжения на зажимах электродвигателя вызывает изменение частоты вращения его ротора.
На схеме тиристоры VI — V6 включены встречно-параллельно в каждую фазу статора электродвигателя и выполняют роль быстродействующих бесконтактных переключателей. Напряжение, подводимое к электродвигателю, изменяется управлением проводимости тиристоров. Для получения жестких механических характеристик в схеме предусмотрена обратная связь по частоте вращения, выполненная с помощью тахогенератора G, и динамическое торможение асинхронного электродвигателя, которое осуществляется с помощью тиристоров V7 и V8, причем переход от двигательного режима работы электродвигателя к тормозному режиму происходит автоматически с помощью блока тормозного режима БТР.
Тиристорами управляют с помощью электронной схемы. Управляющее напряжение постоянного тока снимается с резистора с переменным сопротивлением, подается в блок генератора пилообразного напряжения ГПН и сравнивается с пилообразным напряжением синхронным и синфазным с сетью. Резистор связан с командоконтроллером, и величина его сопротивления зависит от положения рукоятки управления. При установке рукоятки управления в одно из положений вправо (влево) в результате отклонения напряжения пилообразной формы относительно напряжения управления появляется импульс, длительность которого зависит от значения напряжения управления, т. е. от положения, в которое установлена рукоятка управления. Этот импульс поступает в блок формирования импульса ФИ, в котором происходит его предварительное усиление и преобразование в импульс соответствующей формы. Преобразованный импульс поступает в блок усиления мощности импульсов У МИ, где усиливается до значений, необходимых для надежного управления тиристорами, после чего поступает на управляющие электроды тиристоров. При этом открыты и управляются тиристоры VI — V6, тиристоры V7 и V8 заперты и электродвигатель Ml работает в двигательном режиме.
В двигательном режиме работы привода напряжение управления больше напряжения обратной связи, снимаемого с тахогенератора G, и ток протекает в соответствии с полярностью напряжения управления. Момент сопротивления механизма поворота в процессе работы крана может изменяться в зависимости от ветровой нагрузки и подветренной площади обрабатываемого груза. При изменении знака момента сопротивления на валу электродвигателя система начинает ускоряться. Напряжение обратной связи становится больше напряжения управления, вследствие чего изменяется направление тока в цепи и появляются импульсы в блоке БТР. Эти импульсы поступают в блок ФИ, который запирает тиристоры V2, V3, V5, V6 и открывает тиристоры V7, V8 (тиристоры VI и V4 остаются открытыми). Электродвигатель начинает работать в режиме динамического торможения, затормаживая механизм поворота. Когда частота вращения привода уменьшится до величины, заданной управлением, напряжение обратной связи снова станет меньше напряжения управления. При этом исчезнут импульсы в блоке БТР, блок ФИ запрет тиристоры V7 и V8, откроет тиристоры V2, V3, V5, V6 и электр двигатель автоматически перейдет в двигательный режим работы.
Механические характеристики привода (рис. 99, б) обеспечивают работу механизма поворота крана с различной скоростью, величина которой зависит от положения рукоятки командоконтроллера.