Электропривод с двигателем параллельного возбуждения
Электропривод с двигателем параллельного возбуждения
1.1. Построение нагрузочной диаграммы двигателя постоянного тока
Известны следующие параметры механизма:
J=3,6 Нмс 2 — суммарный момент инерции механизма, приведенный к валу двигателя (с учетом момента инерции самого двигателя) при нагрузке Mc1 и Mc2.
Mc=21 Нм — статический момент.
доп=67 с -2 — допустимое ускорение.
р=105 с -1 — рабочая скорость.
Цикл работы механизмов состоит из подъема груза с моментом Мс1 и опускание с моментом Мс2, а также подъем грузозахватывающего устройства с моментом Мс3 и опускание с Мс4.
Операции содержат режимы пуска, установившейся работы, предварительного понижения скорости и торможения. Продолжительность включения ПВ%=65%, при одинаковом времени пауз.
Характерной особенностью электроприводов инерционных механизмов циклического действия является значительная динамическая нагрузка двигателей в переходных процессах. Относительное время переходных процессов в цикле для этих механизмов также весьма значительно. Поэтому при выборе электродвигателя по нагреву необходимо учитывать динамические нагрузки уже на этапе предварительного выбора. Уменьшение времени переходных процессов обычно ограничено допустимым ускорением (например, по условиям механической прочности). Так как реализация этого ограничения возлагается на привод, то максимальный момент электропривода в переходных процессах также должен быть ограничен.
Определяем эти моменты:
 Нм;
Нм;
 Нм;
Нм;
 Нм;
Нм;
 Нм.
Нм.
Суммарный момент инерции при моментах Мс3 и Мс4:
 Нмс 2 .
Нмс 2 .
Момент двигателя равен:
 Нм.
Нм.
Для построения нагрузочной диаграммы Мс = f(t) и тахограммы = f(t) необходимо определить время пуска, установившейся работы, предварительного понижения скорости и торможения при различных моментах.
Время переходных процессов определяем с использованием основного уравнения движения из формулы:
 с;
с;
 с;
с;
 с;
с;
 с;
с;
 с;
с;
 с;
с;
 с;
с;
 с;
с;
 с;
с;
 с;
с;
 с;
с;
 с;
с;
 с;
с;
 с.
с.
Время простоя определяется из выражения:
 .
.
Тогда время простоя t/4 равно:
 с.
с.
По полученным данным построим нагрузочную диаграмму двигателя (рис. 1.1).
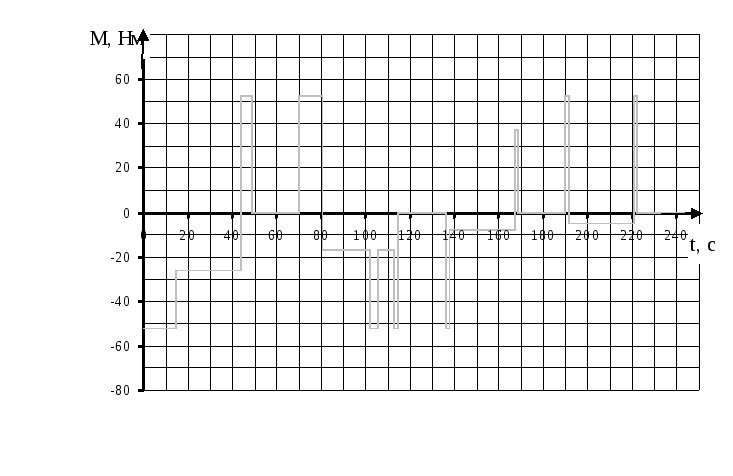
Рис. 1.1. Нагрузочная диаграмма двигателя постоянного тока
1.2. Выбор двигателя
Двигатель постоянного тока параллельного возбуждения выбрать из серии машин длительного режима работы, имеющих рабочую угловую скорость р.
Так как для механизма, работающего с циклической нагрузкой, необходимо выбрать двигатель продолжительного режима, то для этого определяем эквивалентный по нагреву момент:

где Мсi – момент статической нагрузки, соответствующие i-му участку рабочего цикла нагрузочной диаграммы; ti – время работы двигателя на i-м участке; кз = 1,1…1,3 – коэффициент учитывающий отличие нагрузочной диаграммы двигателя от диаграммы статической нагрузки.
Расчётная мощность двигателя  Вт. Исходя из Pр и р по каталогу [1] выбираем двигатель П51 с параметрами: приведёнными в табл.1.1.
Вт. Исходя из Pр и р по каталогу [1] выбираем двигатель П51 с параметрами: приведёнными в табл.1.1.
Электропривод по схеме преобразователь частоты — асинхронный двигатель
Министерство образования и науки Украины
ОДЕССКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ ХОЛОДА
КАФЕДРА ЭЛЕКТРОТЕХНИКИ И ЭЛЕКТРОННЫХ УСТРОЙСТВ
к курсовому проекту
« ЭЛЕКТРОПРИВОД ПО СХЕМЕ ПРЕОБРАЗОВАТЕЛЬ
ЧАСТОТЫ — АСИНХРОННЫЙ ДВИГАТЕЛЬ»
элементы и системы автоматизированного электропривода
1. Исходные данные и Построение нагрузочной диаграммы исполнительного механизма
2. Выбор элементов силовой схемы
2.1 Выбор двигателя и определение его параметров
2.2 Выбор автоматического воздушного выключателя
2.3 Выбор преобразователя частоты
3. Расчет механических характеристик
3.1 Параметры механических характеристик
3.2 Естественная характеристика
3.3 Искусственные характеристики
3.4 Искусственные характеристики при пониженном напряжении
3.5 Механические характеристики при экстренном торможении
4. Оценка необходимости применения обратной связи по скорости
5. Определение среднего КПД системы
6. Переходные процессы в электроприводе
В настоящее время практически любой производственный механизм приводится в действие автоматизированной системой, одним из основных элементов которой, непосредственно преобразующим электрическую энергию в механическую, является электрический двигатель. При помощи соответствующих преобразовательных и управляющих устройств формируются требуемые статические и динамические характеристики исполнительных органов рабочей машины.
Типичная электромеханическая система включает электрический двигатель, а также преобразовательное, передаточное и управляющее устройства, предназначенные для приведения в движение и управления исполнительным органом рабочей машины.
Речь идет не только о сообщении рабочему органу вращательного или поступательного движения, но, главным образом, об обеспечении оптимального режима работы системы в целом, при котором достигается наибольшая производительность при требуемой точности.
В данном курсовом проекте рассматривается электротехническая система переменного тока, использующая короткозамкнутый асинхронный двигатель, питающийся от полупроводникового преобразователя частоты.
Широкому распространению данной системы способствовало появление сравнительно дешевых и достаточно мощных (до 300 кВт в серийном варианте) транзисторных (реже – тиристорных) преобразователей частоты (ПЧ).
Частотный способ регулирования является наиболее перспективным и широко используемым в настоящее время способом регулирования скорости АД. Изменяя частоту f1 питающего напряжения, можно, в соответствии с выражением ω 0 = 2 . . f 1 / p , изменять угловую скорость вращения магнитного поля, получая тем самым различные искусственные характеристики асинхронного двигателя.
Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Электрические потери в роторе, связанные со скольжением, в этом случае невелики, поэтому частотный способ наиболее экономичен.
Для лучшего использования АД и получения высоких энергетических показателей его работы – коэффициента мощности, коэффициента полезного действия и перегрузочной способности – одновременно с изменением частоты приложенного напряжения, необходимо изменять и его величину.
Применяются различные законы изменения напряжения в зависимости от характера нагрузки. Часто исходят из условия сохранения постоянной перегрузочной способности , которая равна отношению критического момента Мк к моменту нагрузки Мс — = Мк / Мс = const.
Система ПЧ-АД, по своим рабочим свойствам приближаясь к системам постоянного тока, одновременно сохраняет все преимущества асинхронного двигателя, как-то — надежность, долговечность, высокую перегрузочную способность, отсутствие щеточного контакта (а значит и искрения) и т.п.
Исходные данные и построение нагрузочной диаграммы исполнительного механизма

2. Выбор элементов силовой схемы
2.1 Выбор двигателя и определение его параметров
2.1.1 Определение мощности двигателя
Асинхронный двигатель выбираем (табл.П2) таким образом, чтобы его номинальный момент был больше максимального момента, найденного из нагрузочной диаграммы.

Видим, что приведенная нагрузочная характеристика системы ПЧ-АД соответствует нагрузочной характеристике механизма, так как для всех скоростей удовлетворяется неравенство Mad>M1mex.
2.1.2 Параметры и характеристики двигателя
С учетом необходимого запаса мощности выбираем четырехполюсный асинхронный двигатель 4A160S4 со следующими параметрами:

2.1.3 Параметры Г-образной схемы замещения

Параметры Т-образной схемы замещения.
Т – образная схема замещения трехфазной ( m 1 =3) асинхронной машины строится для одной фазы, и, по существу, аналогична схеме замещения трансформатора (рис. 1).

Рис. 1 Схема замещения асинхронной машины
Здесь: U 1 — фазное напряжение, В;
R 1 и R 2 ’ – активные сопротивления первичной и вторичной обмоток;
X 1 = ω 1 . L 1 σ и X 2 ’ = ω 1 . L 2 ’ σ – индуктивные сопротивления рассеяния первичной и вторичной обмоток, где ω 1 = 2 . π . f 1 – циклическая частота сети, а f 1 – частота сети;
X m и R m – индуктивное сопротивление намагничивающей ветви, обусловленное основным магнитным потоком, и активное сопротивление, искусственно вносимое в схему замещения для учета магнитных потерь в ферромагнитных частях магнитопровода;
I 1 , I 2 ’ – фазные токи в обмотках статора и ротора;
I m — ток намагничивания, создающий основной магнитный поток Ф m ;
Здесь индекс «штрих» (‘), относящийся ко вторичной обмотке, обозначает, что данная величина приведена к первичной обмотке.

2. 2 Выбор автоматического воздушного выключателя
Силовые выключатели служат для распределения электроэнергии в низковольтных установках в качестве аппаратов защиты питающих линий и потребителей. Они защищают от перегрузки и короткого замыкания установки, двигатели, генераторы и трансформаторы. Предназначены для коммутации и защиты установок, двигателей, трансформаторов и конденсаторов.
Выбор автоматического воздушного выключателя осуществляется по номинальному току двигателя.
Для этой цели могут быть использованы трехфазные силовые автоматические выключатели серии 3 VF фирмы SIMENS . Ток уставки теплового расцепителя устанавливается на 30% больше номинального тока двигателя I u = 1.3 I n

2.3 Выбор преобразователя частоты
Частотный способ регулирования является наиболее перспективным и широко используемым в настоящее время способом регулирования скорости АД. Принцип его заключается в том, что изменяя частоту питающего напряжения f1, можно, в соответствии с выражением ω0 = 2..f1/p, изменять угловую скорость вращения магнитного поля (синхронную скорость вращения ротора), получая тем самым различные искусственные характеристики.
Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Электрические потери в роторе, связанные со скольжением, в этом случае невелики, поэтому частотный способ наиболее экономичен
Расчет системы электропривода производственного механизма
Главная > Курсовая работа >Промышленность, производство
Министерство Транспорта РФ.
Новосибирская Государственная Академия Водного Транспорта.
“Электрооборудование судов и береговых сооружений”
по ”Теории электропривода”
Расчет системы электропривода производственного механизма
2. Задание на курсовую работу
3. Определение сил и моментов
4. Предварительный расчет мощности электродвигателя
5. Определение передаточного числа редуктора
6. Построение тахограммы и нагрузочных диаграмм
7. Проверка двигателя по перегрузочной способности и мощности
8. Расчет и построение механических (электромеханических) характеристик электропривода
9. Расчет и построение графиков переходных процессов электропривода , и
10. Проверка двигателя по нагреву с учетом реальных переходных режимов
11. Расчет и выбор пусковых резисторов приводного АД
12. Принципиальная электрическая схема электропривода производственного механизма
Список используемой литературы
Курсовое проектирование является важным этапом изучение курса “Теория электропривода” и предлагает законченным освоение курсов теоретических основ электротехники, теории автоматического управления и электрических машин.
Целью курсовой работы является приобретение навыков в разработке, применение известных методов расчета и проектирование приводов производственных механизмов. Необходимо, прежде всего, уяснить технологические особенности работу механизма: величину и характер изменения статического момента, плавность и пределы регулирования скорости, частоту и условия пусков и торможений, требования к статическим и динамическим режимам и т.д., что позволит выбрать целесообразный тип и рациональную мощность привода. Обеспечивающего высокую производительность производственного механизма, его надежность и долговечность, высокую производительность, имели бы минимальные массогабаритные показатели и энергозатраты, а также возможность комплексной автоматизации данного производственного процесса.
В курсовой работе предусматривается разработка электропривода по системе генератор-двигатель с асинхронным приводом двигателем с фазным ротором для одного из общепромышленных механизмов циклического действия. Выбор такой системы электропривода обусловлен учебными задачами — закрепление знаний по курсу “Теория электропривода”.
2. Задание на курсовую работу
Задачей курсовой работы является разработка разомкнутой системы реверсивного электропривода производственного механизма, выбор и расчет его силовых элементов, расчет и построение нагрузочных диаграмм и тахограммы, статических и динамических характеристик, кривых переходного процессов и проверка двигателя по нагреву.
На рис. 1 приведена кинематическая схема механизма наклонного подъемника, электропривод которого надлежит разработать.
Наклонный подъемник состоит из тележки 1, перемещающемуся по рельсовому пути, уложенному под углом α к горизонтали. Тележка совершает челночное движение по перемещению груза из нижнего положения из точки А в верхнее положение в точку С на расстояние ℓ. После разгрузки в верхнем положении тележка порожней возвращается в нижнее положении, где проводится ее загрузка, а за тем цикл повторяется.
Перемещение тележки осуществляется при помощи троса 5, наматываемого на барабан 2, который сочленяется через редуктор 3 с двигателем 4. Для улучшения режима работы двигателя к барабану через трос 5 присоединяется противовес 6. При остановках в нижнем и в верхнем положениях тележка удерживается с помощью электромагнитных тормозов. В общем случае предлагается, что при пуске двигателя его растормаживание происходит мгновенно в момент времени, когда электромагнитный момент двигателя Мg сравняется со статическим моментом Мс.
Ходовая часть тележки, к.п.д. редуктора и барабана характеризуется следующими величинами:
1) диаметр колеса тележки
2) диаметр цапфы колеса
3) коэффициент трения качания колеса по рельсу
4) коэффициент трения скольжения в подшипниках колес
5) коэффициент, учитывающий сопротивление движению колеса от трения
его реборды о рельс, от трения на торцевых частях ступицы и т.д.
6) к.п.д. редуктора
8) масса тележки
10) масса противовеса
11) рабочая скорость
12) ползучая скорость тележки
13) допустимое ускорение тележки
14) момент инерции барабана
15) диаметр барабана
16) угол наклона пути
17) время загрузки t з =9
18) время разгрузки t р =7
19) длина пути движения между точками А и С
20) длина пути движения груженой тележки с
21) длина пути разгона и движения порожней тележки с
В качестве электропривода используется система генератор-двигатель постоянного тока независимого возбуждения (Г-Д) с приводным асинхронным двигателем с фазным ротором.
При выполнении курсовой работы необходимо:
1. привести кинематическую схему механизма наклонного подъемника и в соответствии с вариантом записать его показатели;
2. определить величины моментов сопротивления относительно вала барабана для обоих направлений движений тележки;
3. определить предварительную мощность электрических машин системы с учетом ПВ% и рациональное передаточное число редуктора;
4. рассчитать и построить тахограмму и нагрузочные диаграммы , электропривода с учетом динамических нагрузок и при условии постоянства ускорений в периоды переходных процессов;
5. проверить предварительно выбранный двигатель по мощности, используя методы эквивалентных (средних) величин, и по перегрузочной способности. Представить принципиальную схему электропривода;
6. рассчитать и построить статические механические (электромеханические) характеристики для всех режимов работы привода: для груженой и порожней тележки при работе с и ;
7. рассчитать и построить графики переходных процессов электропривода:
, и для всех участков, а также динамическую механическую характеристику ;
8. проверить двигатель по нагреву с учетом реальных переходных процессов;
9. рассчитать и выбрать пусковые резисторы приводного АД
3. Определение сил и моментов
Величина и направление момента на барабане:
где — результирующая реактивной и активной сил, Н;
— сила сопротивления от реактивной статической нагрузки, Н;
— коэффициент сопротивления движению, зависящий от коэффициентов трения качания по рельсу ,м, трения скольжения в подшипниках колес и коэффициента к, учитывающего трения реборды колеса о рельс, торцевых частей ступицы и т.д.;
— радиус цапфы колеса, м;
— диаметр колеса, м;
— нормальная составляющая от веса тележки (при движении вверх , а при движение вниз , Н);
— тангенциальная составляющая от веса тележки , Н;
Реверсивный электропривод постоянного тока
Содержание
1 Описание рабочей машины и исходные данные для проектирования электропривода
2 Расчет упрощенной нагрузочной диаграммы и предварительный расчет мощности двигателя
3 Выбор электродвигателя, определение передаточного числа и выбор редуктора
4 Расчёт приведённых статических моментов, моментов инерции
5 Предварительная проверка двигателя по нагреву
6 Разработка простейшей разомкнутой схемы включения двигателя
7 Разработка замкнутой системы электропривода
8 Расчёт переходных процессов и построение нагрузочных диаграмм электропривода
9 Проверка электропривода по нагреву
Выдержки из текста
Современные автоматизированные электроприводы представляют собой сложные динамические системы, включающие в себя различные линейные и нелинейные элементы (двигатели, генераторы, усилители, полупроводниковых и другие элементы), обеспечивающие в своем взаимодействии разнообразные статические и динамические характеристики.
Электропривод по системе Г-Д с тиристорным возбуждением генератора находит широкое применение во многих отраслях промышленности. Достаточно сказать, что большинство мощных электроприводов постоянного тока различного назначения выполнены по системе Г-Д.
Автоматизированные электроприводы постоянного тока с тиристорными преобразователями в настоящее время являются основным типом регулируемых электроприводов различных отраслей производства.
На практике как правило электропривода основных механизмов выполняются по системе Г — Д (генератор — двигатель), а электропривода всевозможных вспомогательных механизмов (тележка, слитковоз, манипулятор, толкатель и т.п.) выполняются по системе ТП — Д (тиристорный преобразователь — двигатель).
Столь широкое применение тиристорного электропривода обусловлено рядом досто-инств этого типа электропривода, основные из которых следующие:
1) высокое быстродействие, которое ограничивается главным образом коммутационной способностью двигателя и механической инерционностью привода;
2) мгновенная готовность к работе, широкий диапазон температур и длительный срок службы;
3) номинальный КПД тиристорных преобразователей превышает 92-96%;
4) малые весогабаритные показатели, блочная компоновка позволяют сократить требуемые производственные площади, уменьшить капитальные затраты и расходы на установку и эксплуатацию.
В то же время тиристорным электроприводам свойственны некоторые не-достатки:
1) пульсации выпрямленного напряжения и тока на выходе тиристорного преобразователя ухудшают нагрев и коммутацию двигателя, что требует установки сглаживающих дросселей;
2) при глубоком регулировании скорости, при частых пусках, торможениях тиристорный электропривод имеет низкий коэффициент мощности, что требует разработки и установки специальных компенсирующих устройств;
3) при работе тиристорных преобразователей происходит генерация высших гармоник в питающую сеть, что искажает форму напряжения в сети переменного тока и вызывает помехи.
В настоящее время разработаны различные схемы тиристорных преобразователей и системы регулируемого электропривода на их основе. Промышленностью освоен серийный выпуск комплектных тиристорных преобразователей и комплектных тиристорных электроприводов на их основе.
По назначению тиристорные преобразователи подразделяются для питания якоря двигателя и обмоток возбуждения, по исполнению — реверсивные и нереверсивные. Самой благоприятной для тиристорных преобразователей признана трёхфазная мостовая (шестипульсная) схема выпрямления.
Наиболее сложными элементами тиристорного электропривода являются реверсивные двухкомплектные преобразователи. Они применяются в быстродействующих электроприводах, у которых скорость изменения и реверсирования тока (момента) двигателя влияют на производительность механизма или качество регулирования технологических параметров.
При выборе тиристорных преобразователей для регулируемого электропривода необходимо учитывать специфические свойства преобразователей с различными способами управления, их влияние на статические и динамические свойства электропривода.
1 Описание рабочей машины и исходные данные для проектирования электропривода

Рис. 1 Кинематическая схема рабочей машины
Рабочая машина совершает возвратно-поступательное движение на длину L от одного крайнего положения до другого. Движение механизма с грузом происходит с установившейся рабочей скоростью Vраб, возвратное движение без груза — с установившейся скоростью Vвозв. В цикл работы механизма, кроме времени рабочего и возвратного движения, входит время пауз.