
Реактивный двигатель: современные варианты исполнения
Реактивный двигатель: современные варианты исполнения
Реактивными двигателями называют такие устройства, которые создают нужную для процесса движения силу тяги преобразованием внутренней энергии горючего в кинетическую энергию реактивных струй в рабочем теле. Рабочее тело стремительно проистекает из двигателя, и по закону сохранения импульса формируется реактивная сила, которая толкает двигатель в противолежащем направлении. Чтобы разогнать рабочее тело может применяться как расширение газов, нагретых самыми разнообразными способами до высоких температур, а также и другими физическими процессами, в частности, ускорением заряженных частиц в электростатическом поле.

Реактивные двигатели сочетают в себе собственно двигатели с движителями. Имеется в виду, что они создают тяговые усилия исключительно взаимодействием с рабочими телами, без опор, либо контактами с остальными телами. То есть обеспечивают сами себе собственное продвижение, при этом промежуточные механизмы не принимают никакого участия. Вследствие этого в основном они используются для того, чтобы приводить в движение воздушные судна, ракеты и, конечно же, космические аппараты.
Что такое тяга двигателя?
Тягой двигателей называют реактивную силу, которая проявляется газодинамическими силами, давлением и трением, приложенными к внутренним и внешним сторонам двигателя.
Тяги различаются на:
- Внутренние (реактивные тяги), когда не учитывается внешнее сопротивление;
- Эффективные, учитывающие внешнее сопротивление силовых установок.
Отправная энергия запасается на борту летательных или других аппаратов, оснащенных реактивными двигателями (химическим горючим, ядерным топливом), или может притекать снаружи (например, солнечная энергия).
Как формируется реактивная тяга?
Для формирования реактивной тяги (тяги двигателя), которая используется реактивными двигателями, потребуются:
- Источники исходной энергии, которые превращаются в кинетическую энергию реактивных струй;
- Рабочие тела, которые в качестве реактивных струй будут выбрасываться из реактивных двигателей;
- Сам реактивный двигатель в качестве преобразователя энергии.
Как получить рабочее тело?

Для приобретения рабочего тела в реактивных двигателях могут использоваться:
- Вещества, отбираемые из окружающей среды (к примеру, вода, либо воздух);
- Вещества, находящиеся в баках аппаратов или в камерах реактивных двигателей;
- Смешанные вещества, поступающие из окружающей среды и запасаемые на бортах аппаратов.
Современные реактивные двигатели главным образом используют химическую энергию. Рабочие тела представляют собой смесь раскаленных газов, которые являются продуктами сгорания химического горючего. Когда работает реактивный двигатель, химическая энергия от сгорающих веществ преобразуется в тепловую энергию от продуктов сгорания. В то же время тепловая энергия от горячих газов превращается в механическую энергию от поступательных движений реактивных струй и аппаратов, на которых установлены двигатели.
Принцип работы реактивного двигателя
В реактивных двигателях струи воздушных потоков, которые попадают в двигатели, встречаются с обращающимися с колоссальной скоростью турбинами компрессоров, которые засасывают воздух из окружающей среды (при помощи встроенных вентиляторов). Следовательно, происходит решение двух задач:
- Первичное забирание воздуха;
- Охлаждение в целом всего двигателя.
Лопатки турбин компрессоров производят сжатие воздуха приблизительно от 30 и более раз, совершают «проталкивания» его (нагнетание) в камеру сгорания (происходит генерирование рабочего тела). Вообще камеры сгорания выполняют к тому же и роли карбюраторов, производя смешивание топлива с воздухом.

Это могут быть, в частности, смеси воздуха и керосина, как в турбореактивных двигателях современных реактивных самолетах, либо смеси жидкого кислорода и спирта, такими обладают кое-какие жидкостные ракетные двигатели, либо еще какое-то твердое топливо в пороховых ракетах. Как только образовалась топливно-воздушная смесь, происходит ее воспламенение с выделением энергии в виде тепла. Таким образом, топливом в реактивных двигателях могут быть только такие вещества, которые в результате химических реакций в двигателях (при возгорании) выделяют тепло, при этом образуя множество газов.
При возгорании совершается существенное разогревание смеси и деталей вокруг с объемным расширением. Собственно говоря, реактивные двигатели пользуются для продвижения управляемыми взрывами. Камеры сгорания в реактивных двигателях — это одни из самых горячих элементов (температурный режим в них может достигать до 2700 °С), и они требуют постоянного интенсивного охлаждения.
Реактивные двигатели снабжены соплами, через которые из них вовне с огромной скоростью вытекают накаленные газы, которые являются продуктами сгорания топлива. В некоторых двигателях газы оказываются в соплах сразу же после камер сгорания. Это относится, например, к ракетным или прямоточным двигателям.
Турбореактивные двигатели функционируют несколько иначе. Так, газы, после камер сгорания, вначале проходят турбинами, которым отдают свою тепловую энергию. Это делается для того, чтобы привести в движение компрессоры, которые послужат для сжатия воздуха перед камерой сгорания. В любом случае, сопла остаются последними частями двигателей, через которые протекут газы. Собственно они и формируют непосредственно реактивную струю.

В сопла направляют холодный воздух, который нагнетается при помощи компрессоров, чтобы охлаждать внутренние детали двигателей. Реактивные сопла могут обладать различными конфигурациями и конструкциями исходя из разновидностей двигателей. Так, когда скорость проистекания должна быть выше скорости звука, тогда соплам придаются формы расширяющихся труб или же вначале суживающиеся, а далее расширяющиеся (так называемые сопла Лаваля). Только с трубами такой конфигурации газы разгоняются до сверхзвуковых скоростей, при помощи чего реактивные самолеты перешагивают «звуковые барьеры».
Исходя из того, задействуется ли в процессе работы реактивных двигателей окружающая среда, они подразделяются на основные классы воздушно-реактивных двигателей (ВРД) и ракетных двигателей (РД). Все ВРД являются тепловыми двигателями, рабочие тела которых образуются тогда, когда происходит реакция окисления горючих веществ с кислородом воздушных масс. Поступающие из атмосферы воздушные потоки составляют основу рабочих тел ВРД. Таким образом, аппараты с ВРД несут на борту источники энергии (топливо), но большая часть рабочих тел черпается из окружающей среды.
К аппаратам ВРД относятся:
- Турбореактивные двигатели (ТРД);
- Прямоточные воздушно-реактивные двигатели (ПВРД);
- Пульсирующие воздушно-реактивные двигатели (ПуВРД);
- Гиперзвуковые прямоточные воздушно-реактивные двигатели (ГПВРД).

В противоположность воздушно-реактивным двигателям все компоненты рабочих тел РД находятся на борту аппаратов, оснащенных ракетными двигателями. Отсутствие движителей, взаимодействующих с окружающей средой, а также присутствие всех составляющих рабочих тел на борту аппаратов делают ракетные двигатели пригодными для функционирования в космическом пространстве. Имеется также комбинация ракетных двигателей, представляющих собой некое совмещение двух основных разновидностей.
Кратко об истории реактивного двигателя
Считается, что реактивный двигатель изобрели Ганс фон Охайн и выдающийся немецкий инженер-конструктор Фрэнк Виттл. Первый патент на действующий газотурбинный двигатель получил именно Фрэнк Виттл в 1930 году. Тем не менее, первая рабочая модель была собрана собственно Охайном. В конце лета 1939 года в небе появилось первое реактивное воздушное судно – He-178 (Хейнкель-178), который был снаряжен двигателем HeS 3, разработанным Охайном.
Как устроен реактивный двигатель?
Устройство реактивных двигателей довольно-таки простое и в то же время чрезвычайно сложное. Оно простое по принципу действия. Так, забортный воздух (в ракетных двигателях – жидкий кислород) засасывается в турбину. После чего он там начинает смешиваться с горючим и сгорать. На краю турбины образуется так называемое «рабочее тело» (ранее упоминаемая реактивная струя), которое продвигает летательный или космический аппарат.
При всей простоте, на самом деле это целая наука, ведь в середине таких двигателей рабочий температурный режим может достигать более тысячи градусов по Цельсию. Одной из важнейших проблем в турбореактивном двигателестроении является создание неплавящихся деталей из металлов, которые сами поддаются плавлению.

Устройство реактивного двигателя
В начале, перед каждой турбиной всегда располагается вентилятор, засасывающий воздушные массы из окружающей среды в турбины. Вентиляторы обладают большой площадью, а также колоссальной численностью лопастей специальных конфигураций, материалом для которых послужил титан. Сразу за вентиляторами располагаются мощные компрессоры, которые необходимы для нагнетания воздуха под огромным давлением в камеры сгорания. После камер сгорания горящие топливовоздушные смеси направляются в саму турбину.
Турбины состоят из множества лопаток, на которые оказывают давление реактивные потоки, которые и приводят турбины во вращение. Далее турбины вращают валы, на которых «насажены» вентиляторы и компрессоры. Собственно так, система становится замкнутой и нуждается исключительно в подводе топлива и воздушных масс.
Вслед за турбинами потоки направляются в сопла. Сопла реактивных двигателей являются последними, но не самыми последними по своей значимости частями в реактивных двигателях. Они формируют непосредственные реактивные струи. В сопла направляются холодные воздушные массы, нагнетаемые вентиляторами для охлаждения «внутренностей» двигателей. Эти потоки ограничивают манжеты сопел от сверхгорячих реактивных потоков и не позволяют им расплавляться.
Отклоняемый вектор тяги

Реактивные двигатели обладают соплами самых разнообразных конфигураций. Самыми передовыми считаются подвижные сопла, размещенные на двигателях, у которых имеется отклоняемый вектор тяги. Они могут сдавливаться и расширяться, а также отклоняться на существенные углы — так регулируются и направляются непосредственно реактивные потоки. Благодаря этому воздушные судна с двигателями, имеющими отклоняемый вектор тяги, становятся чрезвычайно маневренными, потому что процессы маневрирования происходят не только вследствие действий механизмов крыльев, но также прямо самими двигателями.
Типы реактивных двигателей
Имеется несколько основных разновидностей реактивных двигателей. Так, классическим реактивным двигателем можно назвать авиадвигатель в самолете F-15. Большинство таких двигателей используются преимущественно на истребителях самых разнообразных модификаций.
Двухлопастные турбовинтовые двигатели
В этой разновидности турбовинтовых двигателей мощность турбин через понижающие редукторы направляется для вращения классических винтов. Наличие таких двигателей позволяет большим воздушным суднам осуществлять полеты с максимально приемлемыми скоростями и при этом расходовать меньшее количество авиатоплива. Нормальная крейсерская скорость у турбовинтовых воздушных суден может быть 600—800 км/ч.
Турбовентиляторные реактивные двигатели
Эта разновидность двигателей является более экономичной в семействе двигателей классических типов. Главной отличительной характеристикой в них является то, что на входе ставятся вентиляторы больших диаметров, которые подают воздушные потоки не только для турбин, но и создают довольно-таки мощные потоки вне их. Вследствие этого, можно достичь повышенной экономичности, путем усовершенствования КПД. Они используются на лайнерах и больших воздушных суднах.

Прямоточные воздушно-реактивные двигатели
Эта разновидность двигателей функционирует таким образом, что не нуждается в подвижных деталях. Воздушные массы нагнетаются в камеру сгорания непринужденным путем, благодаря торможению потоков об обтекатели входных отверстий. В дальнейшем совершается все то же, что и в обыкновенных реактивных двигателях, а именно воздушные потоки смешиваются с топливом и выходят как реактивные струи из сопел. Прямоточные воздушно-реактивные двигатели применяются в поездах, в воздушных суднах, в «беспилотниках», в ракетах, кроме того они могут устанавливаться на велосипеды или скутеры.
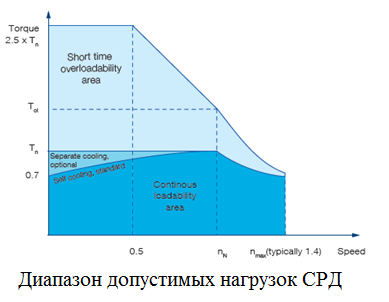
Синхронные реактивные двигатели (СРД)
Введение
 Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.
Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.
А теперь представьте себе электрический двигатель с максимально простой конструкцией ротора. Это сделать довольно-таки сложно из-за сложившихся стереотипов о функционировании электрической машины, но именно так можно вкратце описать набирающие популярность Синхронные Реактивные Двигатели (с англ. Synchronous Reluctance Machine, СРД). В последнее время на эти электрические машины все больше обращают внимание производители двигателей, а также инжиниринговые компании по всему миру, и не случайно. Давайте разберемся, что же из себя представляют СРД.
Синхронный Реактивный Электродвигатель – синхронная машина, вращающий момент которой обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов – такое определение дает ГОСТ 27471-87.
Принцип работы синхронного реактивного двигателя
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается когда ротор пытается установить свою наиболее магнито — проводящую ось (d-ось) с приложенным к нему полем, чтобы минимизировать сопротивление в магнитной цепи. Иными словами, вращающееся магнитное поле статора увлекает за собой ротор. Амплитуда потока статора управляется через ось d, тогда как ток, отвечающий за момент управляется через ось q. Оси приведены к статору двигателя.
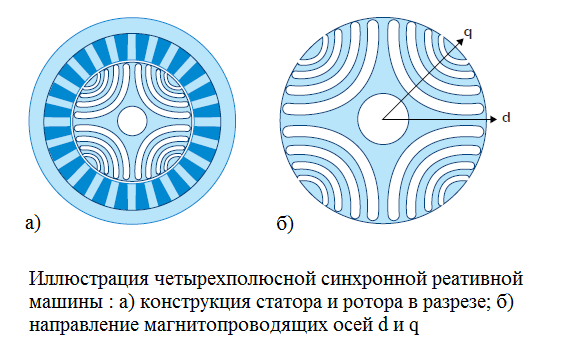
В рассмотренном исполнении ротора разницы между магнитными сопротивлениями осей добиваются за счет увеличения воздушного зазора по оси q. Амплитуда момента прямо пропорциональна разнице между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент. Математически это можно выразить с некоторыми допущениями, рассмотрев формулу электромагнитного момента для синхронной явнополюсной машины без возбуждения на роторе:
Мр = [mU 2 /(2ω1 )] (1/Хq — 1/Хd ) sin 2θ,
где m=3 для трехфазного исполнения статора, ω1- угловая скорость ротора, Xq -индуктивное сопротивление по оси q ротора, Xd — индуктивное сопротивление по оси d ротора, θ-угол между полем ротора и полем статора, характеризующий степень растянутости «магнитной пружины».
Таким образом, в отличие от синхронной машины с обмоткой возбуждения, синхронная реактивная машина в классическом представлении имела меньший момент, а также невысокий коэффициент мощности и коэффициент полезного действия (КПД). Объяснялось это значительным намагничивающим током статора, так как возбуждение происходит за счет реактивной составляющей тока. Пуск таких двигателей осуществлялся за счет демпфирующей короткозамкнутой обмотки, т.е. имел место асинхронный пуск синхронного двигателя. Но на сегодняшний день, СРД успешно эксплуатируются в комплекте с преобразователями частоты (ПЧ) YASKAWA GA700 и ПЧ GA500. Пуск происходит благодаря алгоритму, заложенному в ПЧ (управление током намагничивания id статора и током статора, отвечающим за момент iq), следовательно, необходимость асинхронного пуска устраняется. В итоге, коэффициент мощности и КПД у современных СРД заметно увеличился, а конструкция ротора стала максимально простой. В среднем у синхронных реактивных двигателей остается худший коэффициент мощности на 5-10% из-за принципиальных особенностей работы, но на 5- 8 % лучший КПД в сравнении с асинхронными двигателями как в номинальном режиме, так и при работе на всем диапазоне скоростей при регулировании скорости вниз от номинала.
Наибольший интерес у разработчиков систем электропривода вызвала конструкция СРД. Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой. То есть, статор двигателя идентичен статору широко используемого асинхронного двигателя.
Особенно интересен ротор, который представляет собой вал с болванкой из шихтованной стали. На роторе отсутствуют обмотки, а также постоянные магниты.
Выделяют три основных типа ротора реактивного двигателя: ротор с явно выраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.
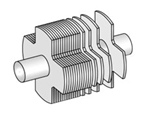 а) Ротор с явно выраженными полюсами
а) Ротор с явно выраженными полюсами
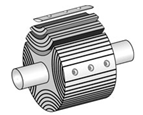 б) Аксиально-расслоенный ротор
б) Аксиально-расслоенный ротор
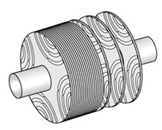 в) Поперечно-расслоенный ротор
в) Поперечно-расслоенный ротор
Отличительная особенность синхронных реактивных двигателей (СРД) — отсутствие в них возбуждения со стороны ротора. Основной магнитный поток в этом двигателе создается исключительно за счет вращающейся МДС обмотки статора.
Так как, СРД – синхронная машина, то его механическая характеристика в разомкнутой системе будет абсолютно жесткой.
Достоинства и недостатки синхронного реактивного двигателя:
Преимущества СРД:
1. Простота и надежность ротора, состоящего из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки;
2. Низкий нагрев. Так как в роторе нет обмоток, поэтому через него не протекает активный ток с выделением тепла. Это положительно сказывается на сроке жизни подшипников, а также на коэффициенте полезного действия системы. Так как снижаются потери на нагрев, то номинальный ток двигателя может быть завышен, что позволяет получить (при аналогичной мощности) более высокий момент (на 20-40%), чем у асинхронного двигателя.
3. Отсутствие магнитов. Из-за этого снижается конечная цена двигателя, так как при производстве не используются редкоземельные элементы.
4. Низкий момент инерции ротора. Так как ротор представляет собой болванку без магнитов и обмоток, которые увеличивают этот показатель в асинхронных двигателях и двигателях с постоянными магнитами. Соответственно, уменьшается типоразмер двигателей. Из чего вытекает следующее преимущество.
5. Меньшие габариты при той же мощности в сравнении с АД.
6. Высокий КПД и cosφ (косинус фи). При работе от сети, а такие двигатели в старых системах работали от сети и снабжались дополнительной пусковой обмоткой на роторе, СРД демонстрировали не лучшие энергетические показатели, но применяя специализированный преобразователь частоты, например, YASKAWA GA700 и GA500, разработанный для работы с синхронными реактивными двигателями, картина в корне меняется. В таких преобразователях происходит разделение между сетью и питающим напряжением двигателя, а программное обеспечение позволяет корректировать выходной ток, создавая наиболее благоприятные условия работы двигателя (в GA700 режим EZOLV). Таким образом СРД оставляет за собой все преимущества, описанные выше, избегая недостатков возникавших ранее при работе от сети. Если все – таки происходит снижение коэффициента мощности, это может означать, что для данного применения должен быть выбран преобразователь на больший номинальный ток.
7. Абсолютно жесткая механическая характеристика в разомкнутой системе. Это говорит о том, что двигатель способен поддерживать скорость на заданном уровне с большой точностью, до тех пор, пока момент не превысит максимальное значение.
Недостатки СРД:
1. Пуск и работа СРД возможны только от преобразователя частоты. Бездатчиковая система управления отслеживания положения ротора является необходимым условием работы синхронного реактивного двигателя. Преобразователь в каждый момент времени отслеживает потребляемый ток двигателя, так как при повороте вала изменяется магнитное сопротивление в зазоре, и формирует магнитное поле в соответствии с этим изменением, добиваясь высокой производительности.
2. Низкий коэффициент мощности при работе с ослаблением поля. СРД демонстрируют лучшие энергетические показатели при работе в зоне насыщения. При выходе на повышенную скорость, необходимо уменьшить ток намагничивания машины id, в результате чего, заметно упадет момент двигателя, а коэффициент мощности резко снизится в следствие потребления большего реактивного тока. Поэтому для применений в которых осуществляется работа на повышенных скоростях такие двигатели лучше не использовать.
Заключение:
Синхронные реактивные двигатели являются перспективным направлением для интеграции в новые системы и для модернизации старых систем электропривода. Больший КПД на всем диапазоне скоростей в сравнении с СДПМ и АД способствует в пользу выбора этого двигателя при разработке новых систем, соответствующих международному стандарту энергоэффективности IE4. Простота конструкции ротора и проверенная технология изготовления статора позволяют такому двигателю легко найти свое применение в насосных агрегатах и вентиляторах, а также в применениях с постоянным моментом и регулированием скорости вниз от номинала. Единственной проблемой такого двигателя является потребление большего реактивного тока в сравнении с асинхронными двигателями, но при использовании частотного преобразователя YASKAWA GA700 и GA500 этот недостаток легко устраняется.
IT News
- Новости науки
- Новости игр
- Новости IT
- Другие новости
- Физика
- Погода и климат
- Человеческое тело
- Подводный мир
- Все о транспорте
Last update Вс, 29 Янв 2017 11pm
Как работает реактивный двигатель?
- » onclick=»window.open(this.href,’win2′,’status=no,toolbar=no,scrollbars=yes,titlebar=no,menubar=no,resizable=yes,width=640,height=480,directories=no,location=no’); return false;» rel=»nofollow»> Печать
Дата Категория: Транспорт

Вращающийся воздушный винт тянет самолет вперед. Но реактивный двигатель с большой скоростью выбрасывает горячие отработавшие газы назад и тем самым создает реактивную силу тяги, направленную вперед.
Типы реактивных двигателей
Существует четыре типа реактивных, или газотурбинных двигателей:
Турбореактивные;
Турбовентиляторные — такие, как используемые на пассажирских лайнерах Боинг-747;
Турбовинтовые, где используют воздушные винты, приводимые в действие турбинами;
и Турбовальные, которые ставят на вертолеты.
Турбовентиляторный двигатель состоит из трех основных частей: компрессора, камеры сгорания и турбины, дающей энергию. Сначала воздух поступает в двигатель и сжимается при помощи вентилятора. Затем, в камере сгорания, сжатый воздух смешивается с горючим и сгорает, образуя газ при высокой температуре и высоком давлении. Этот газ проходит через турбину, заставляя ее вращаться с огромной скоростью, и выбрасывается назад, создавая таким образом реактивную силу тяги, направленную вперед.
Устройство турбовентиляторного двигателя

Попав в турбинный двигатель, воздух проходит несколько ступеней сжатия. Особенно сильно вырастают давление и объем газа после прохождения камеры сгорания. Сила тяги, создаваемая выхлопными газами, позволяет реактивным самолетам двигаться на высотах и скоростях, намного превосходящих те, что доступны винтокрылым машинам с поршневыми двигателями.
Попав в турбинный двигатель, воздух проходит несколько ступеней сжатия. Особенно сильно вырастают давление и объем газа после прохождения камеры сгорания. Сила тяги, создаваемая выхлопными газами, позволяет реактивным самолетам двигаться на высотах и скоростях, намного превосходящих те, что доступны винтокрылым машинам с поршневыми двигателями.
Турбореактивный двигатель

В турбореактивном двигателе воздух забирается спереди, сжимается и сгорает вместе с топливом. Образующиеся в результате сгорания выхлопные газы создают реактивную силу тяги.
Турбовинтовой двигатель

Турбовинтовые двигатели соединяют реактивную тягу выхлопных газов с передней тягой, создаваемой при вращении воздушного винта.
Реактивная тяга или как устроен ионный реактивный двигатель

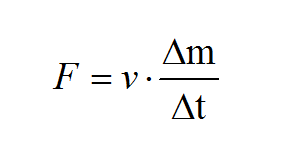
Не секрет, что все реактивные двигатели работают за счёт закона сохранения импульса. Именно из него вытекает, что реактивная тяга — это произведение массового расхода на скорость выхода рабочего тела из сопла.
Эту скорость принято называть удельным импульсом реактивного двигателя. Давайте для примера найдём реактивную тягу при стрельбе из автомата Калашникова, которая является основной составляющей отдачи. Пусть масса пули будет 0,016 кг, начальная скорость пули 700 м/с, а скорострельность 10 выстр./с. Тогда отдача F=700∙0,016∙10=112 Н (или 11 кгс). Большая отдача, но тут приведена техническая скорострельность 600 выстр./мин. В реальности стрельба ведётся очередями или одиночными и составляет ≈50 выстр./мин.

Вернёмся к реальным реактивным двигателям, в которых вместо пуль обычно используются потоки выходящего с гиперзвуковой скоростью газа. Химические реактивные двигатели являются самыми распространёнными, но не единственными.
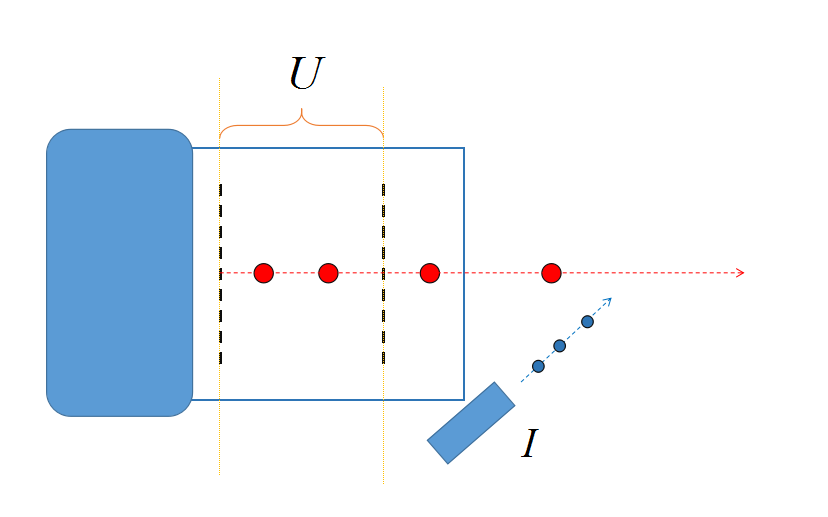
В этой статье, с большим предисловием, я хочу рассказать об ионных реактивных двигателях (далее ИРД). ИРД используют в качестве рабочего тела заряженные частицы — ионы. Ионы имеют массу, и если их разогнать электрическим полем, то можно создать реактивную тягу. Это всё в теории, а теперь подробнее. ИРД имеет некоторый запас газа, который ионизируют (т.е. нейтрально-заряженные атомы газа разбивают на отрицательные электроны и положительные ионы) с помощью газового разряда. Далее ионы разгоняются электрическим полем с помощью специальной системы сеток, и эта же система сеток блокирует движение электронов. После того, как положительные ионы вылетели из сопла, их нейтрализуют отрицательными электронами (в результате этого происходит рекомбинация и газ начинает светиться), чтобы ионы не притягивались обратно к двигателю, и тем самым не снижали его тяги.

Удельный импульс ионных реактивных двигателей достигает 50 км/с, что в 150 раз превышает скорость звука! Увы, но тяга таких двигателей составляет около 0,2 Н. Почему же так? Ведь удельный импульс очень большой. Дело в том, что масса ионов очень маленькая и массовый расход получается небольшим. Для чего тогда такие двигатели нужны, если они ничего не смогут сдвинуть с места? На Земле может быть не смогут, а вот в космосе, где нет сил сопротивления, они достаточно эффективные. Существует такое понятие как полный импульс — произведение тяги на время или произведение удельного импульса на массу топлива, который у ИРД является достаточно большим.
Решим следующую задачу. Пусть жидкостный ракетный двигатель имеет удельный импульс 5 км/с, а у нашего ИРД он будет 50 км/с. И давайте масса рабочего тела (в ЖРД она равна массе топлива) у обоих двигателей будет 50 кг. Примем массу космического аппарата равной 100 кг.
Найдём по формуле Циолковского конечную скорость аппарата (т.е. когда в нём закончится рабочая масса).
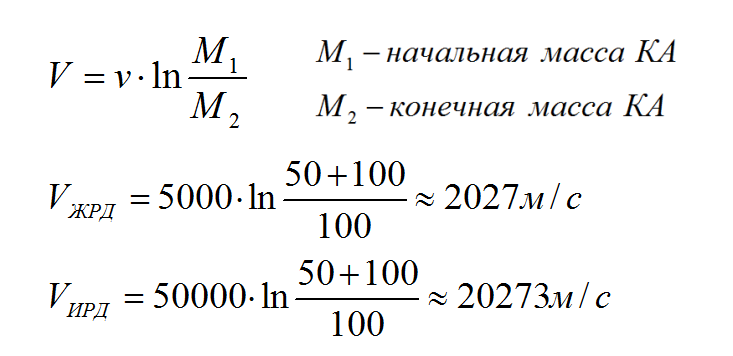
И что получается, если ионный и химический реактивные двигатели будут иметь одинаковую массу топлива, то ИРД сможет разогнать космический аппарат до больших скоростей, нежели химический РД. Правда на ИРД космический аппарат будет разгонятся дольше до конечной скорости, чем на ЖРД. Но в путешествиях к далёким планетам, высокая конечная (разгонная) скорость будет компенсировать этот недостаток.
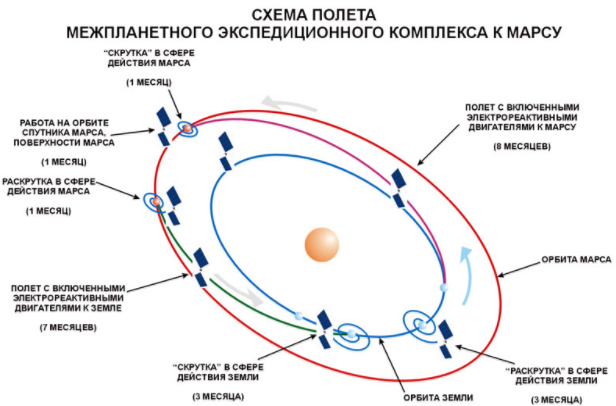
ИРД используются и в наше время. Например, аппарат Deep Space 1 сблизился с астероидом Брайль и кометой Борелли, передал на Землю значительный объём ценных научных данных и изображений.

Deep Space 1
Также космическая антенна LISA, которая сейчас находится на стадии проектирования, будет использовать ИРД для корректировки орбиты.
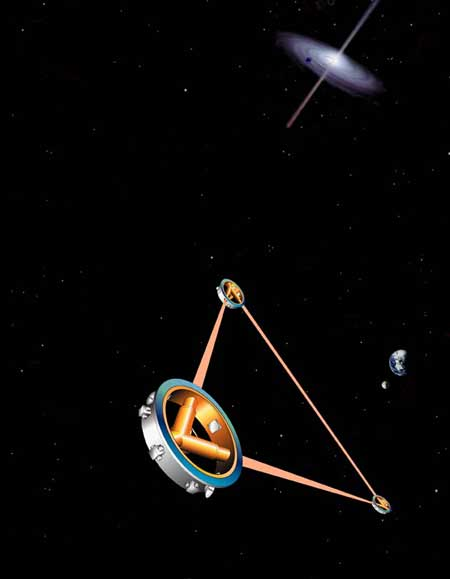
Laser Interferometer Space Antenna
И напоследок, давайте определим тягу ИРД, зная массу иона М=6,5∙10^-26 кг, ускоряющие напряжение U=50 кВ, ток нейтрализации I=0,5 А, элементарный заряд е=1,6∙10^-16 Кл.
Напряжение — это работа по переносу заряда, т.е. на выходе из сопла ион будет иметь кинетическую энергию равную произведению напряжения на заряд иона. Из кинетической энергии выражаем скорость (удельный импульс). Найдём массовый расход из определения тока, электрический ток — это проходящий заряд во времени. Получается, что массовый расход — это произведение массы иона и тока, делённое на заряд иона. Перемножая удельный импульс и массовый расход, получаем тягу равную 0,1 Н.

Подводя итог, хочу сказать, что существуют плазменные реактивные двигатели, у которых схожее устройство, но которые имеют намного больший массовый расход рабочего тела. Кто знает, может быть уже завтра на таких двигателях человечество будет летать на Марс и Луну.

