
6 Режимы работы, энергетические диаграммы асинхронной машины
6 Режимы работы, энергетические диаграммы асинхронной машины
Режимы работы, энергетические диаграммы асинхронной машины
а другая часть — в виде магнитных потерь в сердечнике статора (первичной цепи):

оставшаяся часть мощности

представляет собой электромагнитную мощность, передаваемую посредством магнитного поля со статора на ротор. На схеме замещения этой мощности соответствует мощность в активном сопротивлении вторичной цепи. Поэтому

Часть этой мощности теряется в виде электрических потерь в активном сопротивлении вторичной обмотки:

Остальная часть мощности Рэм превращается в механическую мощность Рмх, развиваемую на роторе:

Часть механической мощности теряется внутри самой машины в виде механических потерь (на вентиляцию, на трение в подшипниках и на щетках машин с фазным ротором, если эти щетки при работе не поднимаются), магнитных потерь в сердечнике ротора и добавочных потерь. Последние вызваны в основном высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник н. с. обмоток и зубчатого строения статора и ротора. Во-первых, высшие гармоники поля индуктируют э.д.с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационным и потерями. Магнитные потери в сердечнике ротора при нормальных рабочих режимах обычно очень малы и отдельно не учитываются.
Добавочные потери принимают равными 0,5% от подводимой мощности при номинальной нагрузке. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами..
Полезная механическая мощность на валу, или вторичная мощность

Сумма потерь двигателя.


К.п.д. двигателя мощностью Рн = 1 — 1000 кВт при номинальной нагрузке находится соответственно в пределах 0,72 — 0,95. Более высокие к. п. д. имеют двигатели большей мощности и с большей скоростью вращения.
Энергетическая диаграмма асинхронного двигателя.
Тормозные режимы асинхронных двигателей
 Асинхронный двигатель может работать в следующих тормозных режимах: в режиме рекуперативного торможения, противовключения и динамическом.
Асинхронный двигатель может работать в следующих тормозных режимах: в режиме рекуперативного торможения, противовключения и динамическом.
Рекуперативное торможение асинхронного двигателя
Режим рекуперативного торможения осуществляется в том случае, когда скорость ротора асинхронного двигателя превышает синхронную.
Режим рекуперативного торможения практически применяется для двигателей с переключением полюсов и в приводах грузоподъемных машин (подъемники, экскаваторы и т.п.).
При переходе в генераторный режим вследствие изменения знака момента меняет знак активная составляющая тока ротора. В этом случае асинхронный двигатель отдает активную мощность (энергию) в сеть и потребляет из сети реактивную мощность (энергию), необходимую для возбуждения. Такой режим возникает, например, при торможении (переходе) двухскоростного двигателя с высокой на низкую скорость, как показано на рис. 1 а.
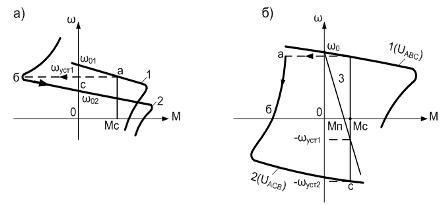
Рис. 1. Торможение асинхронного двигателя в основной схеме включения: а) с рекуперацией энергии в сеть; б) противовключением
Предположим, что в исходном положении двигатель работал на характеристике 1 и в точке а, вращаясь со скоростью ωуст1 . При увеличении числа пар полюсов двигатель переходит на характеристику 2, участок бс которой соответствует торможению с рекуперацией энергии в сеть.
Этот же вид торможения может быть реализован в системе преобразователь частоты – двигатель при останове асинхронного двигателя или при переходе с характеристики на характеристику. Для этого осуществляется уменьшение частоты выходного напряжения, а тем самым синхронной скорости ωо = 2π f / p .
В силу механической инерции текущая скорость двигателя ω будет изменяться медленнее чем синхронная скорость ωо , и будет постоянно превышать скорость магнитного поля. За счет этого и возникает режим торможения с отдачей энергии в сеть .
Рекуперативное торможение также может быть реализовано в электроприводе грузоподъемных машин при спуске грузов. Для этого двигатель включается в направлении спуска груза (характеристика 2 рис. 1 б).
После окончания торможения он будет работать в точке со скоростью – ωуст2 . При этом осуществляется процесс спуска груза с отдачей энергии в сеть.
Рекуперативное торможение является наиболее экономичным видом торможения.

Торможение асинхронного электродвигателя противовключением
Перевод асинхронного двигателя в режим торможения противовключением может быть выполнен двумя путями. Один из них связан с изменением чередования двух фаз питающего электродвигатель напряжения.
Допустим, что двигатель работает на характеристике 1 (рис. 1 б) при чередовании фаз напряжения АВС. Тогда при переключении двух фаз (например, В и С) он переходит на характеристику 2, участок аб которой соответствует торможению противовключением.
Обратим внимание на то обстоятельство, что при противовключении скольжение асинхронного двигателя изменяется от S = 2 до S = 1.
Ротор при этом вращается против направления движения поля и постоянно замедляется. Когда скорость спадает до нуля, двигатель должен быть отключен от сети, иначе он может перейти в двигательный режим, причем ротор его будет вращаться в направлении, обратном предыдущему.
При торможении противовключением токи в обмотке двигателя могут в 7–8 раз превышать соответствующие номинальные токи. Заметно уменьшается коэффициент мощности двигателя. О КПД в данном случае говорить не приходится, т.к. и преобразуемая в электрическую механическая энергия и энергия, потребляемая из сети, рассеиваются в активном сопротивлении ротора, и полезно используемой энергии в данном случае нет.
Короткозамкнутые двигатели кратковременно перегружаются по току. Правда, у них при (S > 1) вследствие явления вытеснения тока заметно возрастает активное сопротивление ротора. Это приводит к уменьшению и увеличению момента.
С целью увеличения эффективности торможения двигателей с фазным ротором в цепи их роторов вводят добавочные сопротивления, что позволяет ограничить токи в обмотках и увеличить момент.
Другой путь торможения противовключением может быть использован при активном характере момента нагрузки, который создается, например, на валу двигателя грузоподъемного механизма.
Допустим, что требуется осуществить спуск груза, обеспечивая его торможение с помощью асинхронного двигателя. Для этого двигатель путем включения в цепь ротора добавочного резистора (сопротивления) переводится на искусственную характеристику (прямая 3 на рис. 1).
Вследствие превышения моментом нагрузки Мс пускового момента Мп двигателя и его активного характера груз может опускаться с установившейся скоростью – ωуст2 . В этом режиме торможение скольжения асинхронного двигателя может изменяться от S = 1 до S = 2.
Динамическое торможение асинхронного двигателя
Для динамического торможения обмотки статора двигатель отключают от сети переменного тока и подключают к источнику постоянного тока, как это показано на рис. 2. Обмотка ротора при этом может быть закорочена, или в ее цепь включаются добавочные резисторы с сопротивлением R2д.
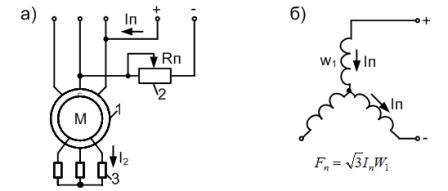
Рис. 2. Схема динамического торможения асинхронного двигателя (а) и схема включения обмоток статора (б)
Постоянный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает относительно статора неподвижное магнитное поле. При вращении ротора в нем наводится ЭДС, частота которой пропорциональна скорости. Эта ЭДС, в свою очередь, вызывает появление тока в замкнутом контуре обмотки ротора, который создает магнитный поток, также неподвижный относительно статора.
Взаимодействие тока ротора с результирующим магнитным полем асинхронного двигателя создает тормозной момент, за счет которого достигается эффект торможения. Двигатель в этом случае работает в режиме генератора независимо от сети переменного тока, преобразовывая кинетическую энергию движущихся частей электропривода и рабочей машины в электрическую, которая рассеивается в виде тепла в цепи ротора.
На рисунке 2 б показана наиболее распространенная схема включения обмоток статора при динамическом торможении. Система возбуждения двигателя в этом режиме является несимметричной.
Для проведения анализа работы асинхронного двигателя в режиме динамического торможения несимметричную систему возбуждения заменяют симметричной. С этой целью принимается допущение, что статор питается не постоянным током Iп, а некоторым эквивалентным трехфазным переменным током, создающим такую же МДС (магнитодвижущую силу), что и постоянный ток.
Электромеханическая и механические характеристики представлены на рис. 3.
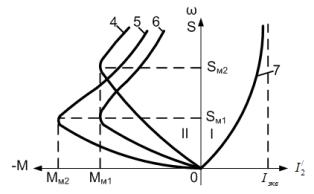
Рис. 3. Электромеханическая и механические характеристики асинхронного двигателя
Характеристика расположена на рисунке в первом квадранте I, где s = ω / ωo – скольжение асинхронного двигателя в режиме динамического торможения. Механические характеристики двигателя расположены во втором квадранте II.
Различные искусственные характеристики асинхронного двигателя в режиме динамического торможения можно получить, изменяя сопротивление R2 д добавочных резисторов 3 (рис. 2) в цепи ротора или постоянный ток I п, подаваемый в обмотки статора.
Варьируя значения R2 д и I п, можно получить желаемый вид механических характеристик асинхронного двигателя в режиме динамического торможения и, тем самым, соответствующую интенсивность торможения асинхронного электропривода.
Мирошник А. И., Лысенко О. А.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Асинхронный двигатель устройство и работа

Асинхронный двигатель принцип работы и устройство
Напряжение от источника питания прикладывается к обмотке статора, которая намотана как три группы катушек индуктивности. Под действием этого напряжения через обмотку потечет переменный трехфазный ток, который и создаст вращающееся магнитное поле. В момент пересечении замкнутой обмотки ротора, это магнитное поле, в соответствии с законом об электромагнитной индукции, сгенерирует в ней электрический ток. Взаимодействие вращающегося магнитного поля статора и тока ротора генерирует вращающийся электромагнитный момент, который и приводит ротор в движение. Благодаря сумме этих моментов, создаваемых разными проводниками, появляется результирующий момент заставляющий вращаться ротор в том направлении, в котором находится электромагнитное поле в статоре. Ротор и магнитное поле вращаются с разными скоростями, т.е. асинхронно. У этого типа электрических двигателей скорость, с которой будет вращаться ротор, всегда будет ниже скорости, с которой вращается поле в статоре электродвигателя.
С самого начала вращения ротор может осуществить механическую работу с помощью соединенного с ним вала, который передает вращательное движение машине, насосу, вентилятору и т.п. Принцип работы асинхронного электродвигателя отлично рассказывается в видео, чуть ниже:
АД Устройство
Асинхронный двигатель с фазным ротором используются в приводах, которым необходим большой пусковой момент – лифты, краны, и т.п, но при ограниченном номинале значение тока запуска.
Основные компонентами любого асинхронного двигателя являются ротор и статор, разделяемые воздушным промежутком. Другими частями необходимой составляющей, являются магнитопровод и обмотки, остальные компоненты лишь конструктивные, задача которых обеспечить требуемую жесткость, прочность, возможность вращения и стабильность двигателя
Статор – неподвижная часть электродвигателя, на внутренней стороне которого имеются обмотки. Обмотка статора — это обычно трехфазная обмотка, в которой проводники распределены достаточно равномерно по всей площади статора и уложены пофазно в специальных пазах, сделанных с угловым расстоянием 120 градусов. Статорные фазы соединяются методом «звезды» или «треугольника» — и подключены к трехфазному питанию. В процессе вращения в обмотках возбуждения, осуществляется перемагничивание магнитопровода статора, поэтому он изготавливается из отдельных пластин из специальной электротехнической стали – таким образом удается существенно снизить неизбежные магнитные потери.
Асинхронный двигатель с фазным ротором устройство: на роторе находятся три фазные обмотки, подключенные обычно по схеме «звезда». К медным кольцам закрепленным на валу и изолированных от сердечника ротора, подключены концы фазных обмоток. Благодаря такому устройству и конструкции, асинхронный двигатель с фазным ротором получил название – двигатель с контактными кольцами.
Асинхронный двигатель с фазным ротором особенности запуска
Асинхронные двигатели имеют очень простое устройство, их достаточно легко обслуживать в процессе эксплуатации, а главное низкую себестоимость и высокую надежность. Но у них есть и один огромный минус – они потребляют реактивную составляющую мощности. Поэтому их максимальный уровень мощности сильно зависит от мощности самой системы энергоснабжения. Ко всему прочему, из значения пускового тока втрое выше рабочего. В условиях слабой мощности питающей системы энергоснабжения, это может вызвать серьезное падение напряжение и отключение других работающих устройств. АД с фазными роторами, благодаря наличию в схеме ротора пусковых реостатов, могут запускаться с куда меньшим пусковым током.
Сопротивления, находящиеся в схеме ротора, помогают снизить уровень тока не только во время запуска, но и при торможении, реверсе и даже снижении количества оборотов. По мере того, как АД с фазным ротором набирает скорость , для поддержания нужного ускорения, сопротивления исключаются из схемы. То есть когда разгон завершается и АД выходит на нужную частоту, все резисторы цепи шунтируются, двигатель начинает работать со своей исинной механической характеристикой.
Схема запуска асинхронного двигателя с фазным ротором

При включении напряжения питания реле времени КТ1 и КТ2 срабатывают, размыкая свои контакты. После нажатия тумблера запуска SB1 срабатывает контактор КМ3 и запускается двигатель с сопротивлениями, которые добавлены в схему – в этот момент времени на контакторах КМ1 и КМ2 питание отсутствует. В момент подключения контактора КМЗ, в цепи КМ1 реле КТ1 замыкает свой фронтовой контакт через определенный промежуток времени, заданный задержкой. По истечению которого электродвигатель разгоняется, ток ротора начинает снижаться происходит подлючение контактора КМ1 – осуществляется шунтирование первой пусковой ступени сопротивлений. Ток снова увеличивается, но по мере разгона его значение начинает снижаться. Одновременно с этим отключается реле КТ2, и с выставленной задержкой происходит замыкание контакта в цепи КМ2. Происходит шунтирование второй ступени сопротивлений. Двигатель начинает работать в штатном режиме.
Благодаря ограниченному пускового тока, асинхронный двигатель с фазовым ротором можно применять и в слабых сетях.
Асинхронный двигатель с фазным ротором достоинства и недостатки устройства
Если сравнивать его с обычным АД с короткозамкнутым ротором, имеется два основных преимущества:
На практике АД с фазным ротором идеально подходят для случаев, когда нет необходимости в использовании широкой и плавной регулировки скорости и требуется большая мощность двигателя. Для правильного подключения АД необходимо правильно определить начала и концы фазных обмоток.
Это типовой маломощный электродвигатель мощностью до 1500 Вт, который используется в установках, в которых имеется небольшая нагрузка на валу в момент старта, а также в тех случаях, когда питание ЭД может быть только от однофазной сети. Обычно эти двигатели, используют в стиральных и посудомоечных машинах, небольших вентиляторах и т.п.
У типового трехфазного асинхронного двигателя имеется шесть выводов статорной обмотки – три конца и начала. Выводы могут соединяться методом треугольника или звезды. Для этого на корпусе ЭД сделана коммутационная коробка, в которую выводятся начала фаз С1, С2, С3 и их концы С4, С5, С6.
Подборка книг и инструкций связанная с теорией и практикой работы электродвигателей (ЭД), а также советы и рекомендации по их ремонту
Выбор электродвигателей к производственным механизмам — Представлены характеристики различных типов ЭД для наиболее распространенных механизмов, а также методика и расчет их выбора для обеспечения заданной производительности, надежности и экономичности.
Вентильные электродвигатели малой мощности для промышленных роботов — основы теории, конструкция и схемы вентильных ЭД постоянного тока. Дан анализ путей повышения их энергетических показателей и расширения функциональных возможностей. Подробные схемы датчиков положения ротора и частоты вращения с описанием их работы
Как самому рассчитать и сделать электродвигатель — рассмотрены расчеты ЭД малой мощности постоянного и переменного тока. Даны схемы включения трехфазных электродвигателей в однофазную сеть
Аварийные режимы асинхронных электродвигателей и способы их защиты -Расказывется о работе АД при отключениях и несимметрии напряжения, питании от маломощных сетей, большой неравномерности нагрузки
Ремонт электродвигателей Советы по выявлению и устранению неисправностей, организации и проведения ремонтов и испытаний ЭД различных типов
Автоматическое измерение выходных параметров электродвигателей
Для оценки свойств любого электродвигателя (ЭД) осуществляют построению механической характеристики. Механическая характеристика электродвигателя описывает определенную зависимость между электромагнитным моментом и частотой скольжения, либо вращения. Скольжение – показывает, насколько частота вращения магнитного поля обгоняет частоту вращения ротора ЭД.
Имеется интересная особенность применения асинхронного двигателя с фазным ротором в роли асинхронного преобразователя частоты (АПЧ), т.к частота тока протекающего в роторе ЭД пропорциональна частоте статорного тока, а коэффициент пропорциональности – скольжение. С помощью подобных преобразователей из типовой частоты 50 Гц можно получить 100, 200 Гц.
Типовая схема подсоединения АПЧ выглядит, как на рисунке ниже:

Обмотка статора подсоединена к питающей сети с частотой f1. Частоту f2 получают с концов роторной обмотки ротора, куда она поступает через контактные кольца и щетки.
Для такого преобразования частоты требуется приводной двигатель, механически связанный с ротором АПЧ. Таким ЭД может быть синхронный или асинхронный двигатель, если необходимо задать определенную частоту, а можно использовать двигатель постоянного тока, если нужно осуществлять плавную регулировку частоты.
Если ротор преобразователя вращать в режиме противовключения, т.е против направления вращения магнитного поля статора, то скольжение s>1, поэтому, частота получаемого тока будет выше частоты статора f2>f1. Если поменять направление вращения приводного двигателя (ПД), то скольжение s 1, а значит, в числителе формулы выше должен стоять знак плюс, иначе s
Энергетические режимы работы двигателя
Электрическая машина обладает свойством обратимости, то есть может работать как генератором, так и двигателем, переход из одного режима в другой происходит без изменения схемы включения [9; 14].
Энергетический режим работы машины может быть определен, исходя из направления двух переменных: электрических ЭДС (Е) и тока (I) или механических момента (М) и скорости (ω). При одинаковом направлении скорости и момента и разных направлениях ЭДС и тока имеет место двигательный режим. При противоположном направлении скорости и момента и одинаковом направлении ЭДС и тока имеем генераторный режим.
Граничными между генераторным и двигательным режимами являются режимы холостого хода и короткого замыкания, которых одна из электрических или механических переменных равна нулю. При холостом ходе М=0 и I=0, а при коротком замыкании ω=0 и Е=0.
Рассмотрим основные режимы работы электрической машины (рис. 4.2)
1. Двигательный режим М>0,  , момент и направление вращения совпадают
, момент и направление вращения совпадают  (характеристика I);
(характеристика I);
2. Режим холостого хода М=0,  , двигатель не получает энергию из сети, за исключением энергии на возбуждение I=0 (с вала двигателя энергия тоже не снимается), (т. А — на характеристике);
, двигатель не получает энергию из сети, за исключением энергии на возбуждение I=0 (с вала двигателя энергия тоже не снимается), (т. А — на характеристике);
3. Генераторный режим при работе машины параллельно с сетью (торможение с рекуперацией энергии в сеть) М
5. Режим работы генератора последовательно с сетью (торможение противовключением) М>Мкз,  за счет изменения направления скорости ЭДС также меняет свою полярность, ток в якоре совпадает по направлению с приложенным напряжением и ЭДС
за счет изменения направления скорости ЭДС также меняет свою полярность, ток в якоре совпадает по направлению с приложенным напряжением и ЭДС  . Электрическая энергия, поступающая из сети и вырабатываемая самой машиной, рассеивается в виде тепла в якорной цепи. (характеристика III)
. Электрическая энергия, поступающая из сети и вырабатываемая самой машиной, рассеивается в виде тепла в якорной цепи. (характеристика III)
6. режим автономного генератора (рис. 4.3) (динамическое торможение), якорь двигателя отключается от сети и замыкается на тормозной резистор. Механическая энергия, накопленная в системе, выделяется в виде тепла в якорной цепи. Этот режим используется на практике как тормозной. (характеристика IV).
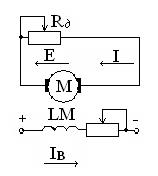
Рис. 4.3. Схема включения ДПТ НВ в режиме автономного генератора
Из уравнения механической характеристики очевидны основные способы регулирования частоты вращения ДПТ НВ:
 — механическая характеристика
— механическая характеристика
 — электромеханическая характеристика
— электромеханическая характеристика
1) изменением сопротивления якорной цепи R,

