Презентации и плакаты Основы электропривода
Презентации и плакаты Основы электропривода





** В связи с нестабильным курсом доллара цену на товар необходимо уточнять.
Комплект учебно-наглядных пособий по основам электропривода включает в себя тщательно проработанный и структурированный графический материал по всему курсу данной дисциплины (68 графических модулей). Дидактические материалы содержат рисунки, схемы, определения и таблицы по основам электропривода и предназначены для демонстрации преподавателем на лекциях. В разработке пособий принимают участие профессора и доценты Южно-Уральского государственного университета, педагогических вузов, а также педагоги-практики с многолетним стажем преподавания. Все иллюстрации выполнены профессиональными художниками.
Презентации по основам электропривода на CD (электронные плакаты):

Диск предназначен для демонстрации преподавателем дидактического материала на занятиях по основам электропривода с использованием интерактивной доски, мультимедийного проектора и прочих компьютерных демонстрационных комплексов. В отличие от обычных электронных учебников для самостоятельного изучения, данные презентации по основам электропривода разработаны специально для показа рисунков, схем, таблиц на лекциях. Удобная программная оболочка имеет оглавление, позволяющее просмотреть необходимый плакат. Предусмотрена защита плакатов от несанкционированного копирования. В помощь преподавателю для подготовки к занятиям прилагается печатное пособие. Ниже представлен состав диска (перечень плакатов) с презентациями по теме основы электропривода.

Перечень плакатов по курсу основы электропривода ( скачать все одним архивом):
Раздел 1. Механика электропривода
Раздел 2. Электропривод с двигателями постоянного тока
Раздел 3. Привод с асинхронным двигателем
Раздел 4. Взаимосвязанный электропривод
Раздел 5. Энергетика электропривода
Печатные плакаты (таблицы) по основам электропривода для оформления кабинетов:
 Плакат на полимерной плёнке
Плакат на полимерной плёнке
 Планшет на жёсткой основе
Планшет на жёсткой основе
Возможен заказ как комплекта типовых плакатов, так и выборочный, используя макеты наглядных пособий из комплекта электронных плакатов «Основы электропривода» на CD. Размер плакатов 560х800 мм или другой по выбору.
Комплект типовых плакатов по основам электропривода:
- Общие вопросы электропривода
- Структурная схема автоматизированного электропривода
- Механика электропривода
- Выбор электродвигателя по мощности
Электропривод постоянного тока - Электродвигатель постоянного тока независимого возбуждения
- Энергетические режимы работы электродвигателя постоянного тока
- Регулирование координат двигателя постоянного тока независимого возбуждения
- Система «Тиристорный преобразователь – двигатель» (ТП-Д)
- Пуск двигателя постоянного тока
Асинхронный электропривод - Асинхронный электропривод
- Энергетические режимы работы асинхронного двигателя
- Реостатное регулирование координат асинхронного двигателя
- Регулирование координат асинхронного двигателя
- Система ПЧ-АД
- Пуск АД
Синхронный электропривод - Принцип работы синхронного двигателя
Вы можете скачать плакаты по основам электропривода в уменьшенном виде для предварительного ознакомления (zip-архив).
Оформление заказа
Купить комплект наглядных пособий по основам электропривода можно отправив заявку факсом или электронной почтой, а также с помощью нашего интернет-магазина (кнопка »добавить в заявку»). После этого наш сотрудник свяжется с Вами для согласования заказа и выставления счета на оплату. Оплата производится по безналичному расчету. Доставка осуществляется почтой или автотранспортными компаниями в любой регион России и страны СНГ. Доставка до транспортной компании производится бесплатно. Стоимость доставки по России 100-300 руб. в зависимости от региона и способа доставки.
Энергетический режим работы асинхронного двигателя
Одним из главных требований, предъявляемых к исполнительным двигателям, является требование высокого быстродействия,под которым понимают способность двигателя достигать заданной частоты вращения за максимально короткое время.
Быстродействие определяется скоростью протекания электромагнитных и электромеханических переходных процессов, возникающих в двигателе при подаче сигнала управления.
Как известно, скорость затухания переходных процессов зависит от постоянных времени — электромагнитной и электромеханической. Благодаря большому активному сопротивлению ротора, электромагнитная постоянная времени Тэм= L/r становится на порядок меньше электромеханической. Поэтому электромагнитными переходными процессами здесь можно пренебречь и считать, что быстродействие исполнительного двигателя определяется только электромеханической постоянной времени. Последнюю найдем из уравнения движения при пуске двигателя вхолостую M = J×dw/dt. Здесь J — момент инерции вращающихся частей.
Механические характеристики идеального асинхронного исполнительного двигателя линейные, что позволяет описать их одной формулой М = Мп(1 — w/wо), где wо и Мп — угловая скорость холостого хода и пусковой момент. Подставив эту формулу в уравнение движения и решив его относительно w, получим

где Тм — электромеханическая постоянная, времени
 (1.11)
(1.11)
На рис. 1.13 показана кривая разгона двигателя, из которой видно, что угловая скорость вращения асимптотически приближается к установившемуся значению wо. При t = Tмугловая скорость вращения w = wо(1 — е -1 ) = 0,633wо. Следовательно, постоянную Тм можно рассматривать как время разгона двигателя до скорости, соответствующей 0,633wо.

Рис. 1.13. Кривая разгона двигателя при пуске в холостую
При амплитудном управлении механические характеристики непараллельные, т.е. пусковой момент пропорционален коэффициенту сигнала Мп = Мпкaэ, где Мпк — пусковой
момент при круговом поле, а угловая скорость идеального холостого хода — не пропорциональна aэ. Ее значение найдем из (1.6), положив m = 0

Подставим эти значения Мп и wо в (1.11), получим

Из этой формулы видно, что с уменьшением коэффициента сигнала, электромеханическая постоянная времени растет, а это значит — быстродействие исполнительного двигателя ухудшается. Сказанное относится и к конденсаторному управлению, чьи характеристики похожи на характеристики при амплитудном управлении.
При фазовом управлении механические характеристики параллельные, т.е. пусковой момент и угловая скорость холостого хода изменяются пропорционально коэффициенту сигнала (Мп = Мпкsinb, wо = w1sinb) . В этом случае электромеханическая постоянная времени будет

т.е. при фазовом управлении постоянная времени и быстродействие не зависят от коэффициента сигнала.
Так как механические характеристики реальных двигателей проходят выше идеальных, постоянные времени реальных двигателей всегда получаются немного меньше идеальных. Однако сказанное выше относительно влияния коэффициента сигнала на быстродействие остается справедливым и здесь.
В выражения постоянных времени входит значение угловой скорости вращения wо = 2pf/p, следовательно, на величину Тмвлияет частота сети и число пар полюсов машины. По этой причине двигатели, рассчитанные на повышенную частоту, имеют большую постоянную времени и худшее быстродействие, чем двигатели, спроектированные на частоту 50 Гц (см. табл.1).
Таблица1. Электромеханические постоянные времени асинхронных исполнительных двигателей
Тип двигателя
АИД с полым немагнитным ротором
АИД с полым ферромагнитным ротором
АИД с ротором «беличья клетка»
§ 1.5. Самоход и пути его устранения
Самоходом называется вращение двигателя при отсутствии сигнала управления. На практике различают два вида самохода: 1) технологический и 2) параметрический.
Технологический самоход проявляется в начале вращения двигателя при подаче только напряжения возбуждения.
Причинами технологического самохода являются слабые эллиптические поля, возникающие в двигателе, благодаря наличию короткозамкнутых контуров в сердечниках и обмотках из-за их плохой изоляции, благодаря неравномерности воздушного зазора, неодинаковой магнитной проводимости стали вдоль и поперек проката и другим факторам технологического характера, приводящим к разделению магнитного потока возбуждения на два, сдвинутых в пространстве и во времени. Как известно, этого достаточно для возникновения вращающихся полей (см. асинхронный двигатель с экранированными полюсами).
Для устранения технологического самохода необходима тщательная технологическая проработка двигателя и высокая культура его производства: хорошая изоляция обмотки и листов стали, точная механическая обработка деталей, обязательна вееробразная шихтовка пакетов — смещение каждого последующего листа на одно зубцовое деление относительно предыдущего.
Параметрический самоход проявляется в продолжении вращения двигателя после снятия сигнала управления.
При снятии сигнала управления исполнительный двигатель становится однофазным, который хотя и не имеет собственного пускового момента, но, будучи раскрученным, продолжает работать. Для исполнительного двигателя такое явление не допустимо.
С целью устранения параметрического самохода асинхронные исполнительные двигатели изготавливаются с роторами, имеющими большое активное сопротивление. В результате момент однофазной машины становится не движущим (+) а тормозящим (-), в чем легко убедиться, рассматривая характеристики двух однофазных двигателей с различными критическими скольжениями: sк = 0,3 и sк = 1 (рис. 1.14,а и б).

Рис. 1.14. Механические характеристики однофазного двигателя с sk = 0,3 (а) и sk = 1 (б)
Таким образом, критические скольжения асинхронных исполнительных двигателей должны быть равными или большими единицы. В реальных двигателях sк= 2¸3, а отдельных случаях даже sк = 7¸8.
Критерий (условие) отсутствия самохода найдем на основании схемы замещения однофазного асинхронного двигателя (рис. 1.15)
В отличии от известной схемы [1], здесь отсутствуют индуктивные сопротивления ротора, которыми мы пренебрегли ввиду их малости по сравнению с активными сопротивлениями rр.

Рис. 1.15. Схема замещения однофазного асинхронного двигателя
Преобразуем эту схему, заменив параллельные контуры последовательными (рис.1.16)

Рис. 1.16. Преобразованная схема замещения однофазного асинхронного двигателя
Электромагнитная мощность однофазного двигателя с точки зрения превращения ее в полезную механическую мощность равна разности электромагнитных мощностей прямой и обратной последовательностей

Самоход будет отсутствовать, если электромагнитная мощность машины будет равна нулю или даже отрицательной, т.е. Рэм
Режимы работы, энергетические соотношения и векторные диаграммы асинхронной машины
Двигательный режим(0

высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник н. с. обмоток и зубчатого строения статора и’ ротора. Во-первых, высшие гармоники поля индуктируют э. д. с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационны-ми потерями. Магнитные потери в сердечнике ротора при нормальных рабочах режимах обычно очень малы и отдельно не учитываются 1 ;
Добавочные потери трудно поддаются расчету и экспериментальному определению. Поэтому, согласно ГОСТ 183—66, их принимают равными 0,5% от подводимой мощности при номинальной нагрузке, а при других нагрузках эти потери пересчитывают пропорционально квадрату первичного тока. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами. Однако эти потери в случае необходимости учитывают соответствующим увеличением сопротивлений гх и г2 и поэтому в величину рд не включают.
Полезная механическая мощность на валу, или вторичная мощность,
В соответствии с изложенным на рис. 24-9, а изображена энер* гетическая диаграмма асинхронного двигателя. Сумма потерь двигателя
К. п. д. двигателей мощностью Рн = 1 -т- 1000 кет при номинальной нагрузке находится соответственно в пределах т]н =


= 0,72 н- 0,95. Более высокие к. п. д. имеют двигатели большей мощности и с большей скоростью вращения.
В качестве иллюстрации приведем данные о потерях и к. п. д. трехфазного асинхронного двигателя с Ря = 14 кет, ия н = = 220/380 в, /1й = 27,2а (фазный), ^ = 50 гц, 2р = 4, sH = 0^28, ян = 1460 об/мин, cos фн = 0,877. Для этого двигателя в номинальном режиме работы Р2 = р^ = 14 000 в/п, рЭл1 = 770 вт, ркГ = = 318 вт, рЭл2 — 411 вт, рих = 205 вт, рЙ = 79 вт, сумма потерь

Рис. 24-9. Энергетические диаграммы асинхронной машины при работе в режиме двигателя (а), генератора (б) и противовключения (в)
ръ = 770 + 318 + 411 + 205 + 79 = 1783 вт. Первичная мощность Рх = 14 000 + 1783 = 15 783 вт. К- п. д., согласно равенству (24-77),
Рассмотрим еще некоторые вопросы, относящиеся к асинхронным двигателям.
Из выражений (24-71), (24-72) и (24-73) вытекают следующие важные соотношения:
Из этих соотношений видно, что электромагнитная мощность РЭм подразделяется на составляющие рэл2 и Рмх пропорционально s и (1 — s) и при заданной величине Рви потери р8л2 пропорциональны скольжению s. Поэтому для уменьшения рЭя2 и получения хорошего к. п. д. необходимо, чтобы s было мало. В нормальных асинхронных двигателях при номинальной нагрузке sH = 0,02 -*■ 0,05.


Очевидно, что требование малости sH сопряжено с требованием, малости г2:)..
Отметим, что электрическая мощность
развиваемая во вторичной цепи асинхронного двигателя, называется; также мощностью скольжения.
На основе схемы замещения рис. 24-6 можно рассмотреть также баланс реактивных мощностей асинхронного двигателя. Из первичной цепи потребляется реактивная мощность
Диаграмма реактивных мощностей двигателя изображена на рис, 24-10, Основную часть реактивной мощности составляет мощность QM, которая из-за наличия воздушного зазора и большого, намагничявающ’его тока /« значительно больше, чем в трансформаторах. Большие величины QM и /н существенно влияют на коэффициент мощности двигателя и снижают его .величину. Обычно у асинхронных двигателей cos ф„ = 0,70 -*- 0,95. Большие значе-* ния относятся к мощным двигателям с 2р — 2 и 4. При уменьшении’ нагрузки cos ф двигателя значительно уменьшается, до значения cgs 1 значительно больше х^, и угол ita поэтому мал.


Генераторный режим (— оо s > — оо. В действительности высокие скорости вращения недопустимы по условиям механической прочности, а по условиям ограничения потерь и нагревания и сохранения высокого к. п. д. в генераторном режиме возможны абсолютные значения скольжения такого же порядка, как и в двигательном режиме.
Рассмотрим на основании соотношения (24-17) активные и реактивные относительно э. д. с. £2 составляющие токи 1%. Для этого положим в выражении (24-17) й»2 = Ег и умножим числитель и знаменатель на сопряженный комплекс знаменателя. Тогда получим

В двигательном режиме s > 0 и обе составляющие 1га, /2/. тока /2 положительны. Множитель — / перед /2г означает поворот вектора /2Г относительно /2О на комплексной плоскости в сторону вращения часовой стрелки на 90°. Это означает, что /2Г отстает от /2а на 90°, т. е. /2г является индуктивным током.
В генераторном режиме s 0, а величина 1Ы меняет знак, т. е. становится отрицательной и меняет свою фазу на 180°. Физически это объясняется тем, что поле вращается относительно ротора по сравнению с двигательным режимом в обратную сторону, вследствие чего изменяются знаки э. д. с. £2S и активной составляющей тока /2. В результате изменяется также знак вращающего момента, т. е. последний действует против направления вращения и становится’ тормозящим.
На основании изложенного на рис. 24-11, б построена векторная диаграмма асинхронного генератора. Вектор первичного тока,
вследствие поворота /^ почти на 180° также поворачивается в сторону вращения часовой стрелки. При этом ц>х > 90° и
т. е. активные составляющие первичного тока и первичной мощности изменяют знак. Это означает, что машина уже не потребляет,, как в режиме двигателя, а отдает в сеть активную мощность и ак- 0, тем не менее, введение понятия об отрицательных активных сопротивлениях полезно. Если положительные сопротивления г являются потребителями электрической энергии Рг, то отрицательные г необходимо рассматривать как источники, или генераторы, электрической энергии Рг. В частности, генератор постоянного тока в целом можно рассматривать как отрицательное сопротивление
Для ненасыщенного генератора последовательного возбуждения U
I, и для него поэтому г = const. Для других генераторов г =f= const. Отрицательные при s 1. На практике в этом режиме обычно 1 0, то в соответствии’С выражением (24-85) активные и реактивные составляющие вторичного тока имеют в» режиме противовключения такие же знаки, как и в двигательном. Это означает, что и в режиме противовключения машина потребляет из сети активную мощность и развивает положительный вращающий момент,

действующий в сторону вращения поля. Но, поскольку ротор вращается в обратном направлении, на него этот момент действует тормозящим образом.
В режиме лротивовключения машина потребляет также механическую мощность с вала или с ротора, поскольку внешний вращающий момент действует в сторону вращения ротора. Как мощ-н сть, потребляемая из сети, так и мощность, потребляемая с вала, расходуются на потери в машине. Полезной мощности машина поэтому не развивает, а в отношении нагрева рассматриваемый режим является тяжелым.
Соотношения (24-67)—(24-76) и (24-78),- (24-79) действительны также и для режима противовключения. При s> 1, согласно выражению (24-71), Р»д>0, а согласно выражению (24-78), рЭл2 > >^ft,M. Поэтому получаемая за счет энергии сети и передаваемая на ротор электромагнитная мощность покрывает только часть-потерь во вторичной обмотке. В соответствии с соотношением (24-74) механическая мощность Рт == *вМ
и в данном случае Рвм > 0 и — Рях > 0.
По сравнению с двигательным и генераторным режимами pa«i боты в режиме противовключения сопротивление г%/$ мало. Поэтому ; на основании равенства (24-1в) можно заключить, что ток /а и угол; «Ф? == Z (£$» !%) велики. Соответственно этому первичный ток Jt и угол сдвига фаз h) тоже велики. Это также указываем на опасность режима в тепловом отношении. Поэтому при Ux — Uln рассматриваемый режим допускается лишь кратковременно. ,
На основании изложенного и в соответствии со схемами рис. 24-6; на ряе. 24-9, в, изображена энергетическая диаграмма, а на; рис. 24-11,^ —векторная диаграмма асинхронной машины в pej жиме противовключения. Преобразование реактивной мощносг^ э режиме противовключения происходит так же, как и в двигательном (рис. 24-1(3).
режим противовключения на практике исдользуетфя для тормо«, зрвия и остановки асинхронных двигателей и Приводимых нм«, & движение производстееннда механизмов. Например, в ряде слу-ч|ев, при необходимости быетро|г остановки двигателя, путей переключения двух питающих нроводт $рехфззвого щт$шт изменяют чередование фаз и ная^вденне вращения щмя, a potop Вч течение некоторого времени вращй?тея прр этой щ п&щщт в прежаем направлении, т. е. теперь.? уще против нбця. МезШяиче^ екая меадяоеть Рмх [см. равенство ^#74)J в данном щучт щзт-^etca за счет кинетической энергии вращающихся ще£ ШМШшт
уменьшения скорости вращения. При п да 0 машину необходимо отключить от сети, так как иначе она придет во вращение в обратном направлении. Таким же образом может осуществляться быстрый реверс (изменение направления вращения) двигателя, причем в этом случае, естественно, при п да О отключать двигатель от сети не нужно. В начале процесса реверсирования также существует режим противовключения.
Режим противовключения называют также режимом электромагнитного тормоза. Следует, однако, иметь в виду, что существуют и другие способы электромагнитного торможения асинхронной машины.
Режим короткого замыкания. Режимом короткого замыкания асинхронной машины называется ее режим при s = 1, т. е. при неподвижном роторе. Этот режим соответствует начальному моменту пуска асинхронного двигателя из неподвижного состояния. Сопротивление асинхронной машины относительно ее первичных зажимов при s — 1 называется сопротивлением короткого замыкания ZK. Согласно схемам замещения рис. 24-6,
Режим работы АМ и преобразование энергии
 |  |  |
 |
Режим двигателя
Этот режим служит для преобразования потребляемой из сети электрической энергии в механическую.
Пусть обмотка статора создаёт магнитное поле, вращающееся с частотой n0 в указанном направлении (рис. 2.9). Это поле будет наводить согласно закону электромагнитной индукции в обмотке ротора ЭДС. Направление ЭДС определяется по правилу правой руки и показано на рисунке (силовые линии должны входить в ладонь, а большой палец нужно направить по направлению движения проводника, т.е. ротора, относительно магнитного поля). В обмотке ротора появится ток, направление которого примем совпадающим с направлением ЭДС. В результате взаимодействия обмотки ротора с током и вращающегося магнитного поля возникает электромагнитная сила F. Направление силы определяется по правилу левой руки (силовые линии должны входить в ладонь, четыре пальца – по направлению тока в обмотке ротора). В данном режиме (рис. 2.9) электромагнитная сила создаст вращающий момент, под действием которого ротор начнёт вращаться с частотой n. Направление вращения ротора совпадает с направлением вращения магнитного поля. Чтобы изменить направление вращения ротора (реверсировать двигатель), нужно изменить направление вращения магнитного поля. Для реверса двигателя нужно изменить порядок чередования фаз подведённого напряжения, т.е. переключить две фазы.
Пусть под действием электромагнитного момента ротор начал вращаться с частотой вращения магнитного поля (n=n0). При этом в обмотке ротора ЭДС E2 будет равна нулю. Ток в обмотке ротора I2=0, электромагнитный момент M тоже станет равным нулю. За счёт этого ротор станет вращаться медленнее, в обмотке ротора появится ЭДС, ток. Возникнет электромагнитный момент. Таким образом, в режиме двигателя ротор будет вращаться несинхронно с магнитным полем. Частота вращения ротора будет изменяться при изменении нагрузки на валу. Отсюда появилось название двигателя – асинхронный (несинхронный). При увеличении нагрузки на валу двигатель должен развивать больший вращающий момент, а это происходит при снижении частоты вращения ротора. В отличие от частоты вращения ротора частота вращения магнитного поля не зависит от нагрузки. Для сравнения частоты вращения магнитного поля n0 и ротора n ввели коэффициент, который назвали скольжением и обозначили буквой S. Скольжение может измеряться в относительных единицах и в процентах.
S=(n0−n)/n0 или S=[(n0−n)/n0]100%.
При пуске в ход асинхронного двигателя n=0,S=1. В режиме идеального холостого хода n=n0,S=0. Таким образом, в режиме двигателя скольжение изменяется в пределах: 0
Р2=Р1-Σp η=  | Рмх≡  Рдоб=0,005Р1 Рдоб=0,005Р1 |
Диаграмма реактивной мощности

На создание полит. рассывая в первичной цепи расходует мощность
q1=m1  xб1
xб1
Qм=m1E1I0=m1  x0
x0
расходится на создание основного магнитного потока q1, а мощность
q2=m1(I2)2  =m2
=m2 

на создание вторичных цепей рассеяния
Из-за наличия возд. зазора I0 у АД ↑, чем у тр-ра
Вращающий момент АД
Полную механическую мощность можно выразить через электромагнитный момент М
Ω- механическая угловая скорость вращения ротора (МУСВ)
 т.к.
т.к. 


по схеме замкнутого двигателя (упрощенной без R)
Максимальные значения моментов (-Mш, и +Mш) при –Sкр и +Sкр (для отрицат. Sкр нужно  )
)
В целях ↑ cosφ1 АД надо, чтобы двигатель работал в режиме номинальном.
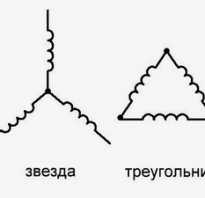
Если он недогружен, то для ↑cosφ1 нужно U1 ↑ , так в двигателях, где обмотка статора в «Δ» нужно обмотку статора соединить в «Υ», уменьшить тем самым U в  раз, активная составляющая тока ↑ , → cosφ1↑
раз, активная составляющая тока ↑ , → cosφ1↑

Пуск в ход и регулирование скорости вращения
Пуск в КЗ ротором
1. Примет (на полное U1) так резко возрастает до Iпуск, по мере разгона двигателя → I↓
2. Когда Iпуск очень большой применяют спец схемы: переключением обмотки статора с «Υ» на «Δ». В начале на «Υ» — потом на «Δ»
Т.е. Iпуск ↓ в 3 раза т.к.
В Δ:  В Υ: В Υ:  | Фазное напряжение на статоре при Υ ↓ и соотношение IФ=IЛ то же в итого: =3 |
3. На понижении напряжения
4. Реакторный (одна фаза)
6. С фазным ротором – включение активного сопротивления в цепь ротора.
Режим генератора
Этот режим служит для преобразования механической энергии в электрическую, т.е. асинхронная машина должна развивать на валу тормозной момент и отдавать в сеть электрическую энергию. Асинхронная машина переходит в режим генератора, если ротор начинает вращаться быстрее магнитного поля (n>n0). Этот режим может наступить, например, при регулировании частоты вращения ротора.
Пусть n>n0. При этом изменится (по сравнению с режимом двигателя) направление ЭДС и тока ротора, а также изменится направление электромагнитной силы и электромагнитного момента (рис. 2.10). Машина начинает развивать на валу тормозной момент (потребляет механическую энергию) и возвращает в сеть электрическую энергию (изменилось направление тока ротора, т.е. направление передачи электрической энергии).
В режиме генератора скольжение изменяется в пределах:
Энергетическая диаграмма активной мощности
Энергетическая диаграмма реактивной мощности аналогична диаграмме реактивной мощности двигателя.