
Датчик угла поворота
Датчик угла поворота

Датчик угла поворота (сокр. ДУП), также энкодер (от англ. encoder — кодирующее устройство) — измерительный преобразователь, предназначенный для преобразования угла поворота вращающегося объекта (например, вала) в цифровые или аналоговые сигналы, позволяющие определить угол его поворота. Датчики угла поворота имеют множество применений. Они широко применяются в промышленности (в частности в сервоприводах), в робототехнике, в автомобилестроении (например, для определения угла поворота рулевого колеса), в компьютерной технике (для определения угла поворота колеса компьютерной мыши) и т. п.
ДУП подразделяются: по способу выдачи информации на накапливающие (инкрементные) и абсолютные (позиционные); по принципу действия на оптические, резистивные, магнитные, индуктивные, механические; по допустимому углу поворота вала на ДУП с ограниченным диапазоном работы и ДУП с неограниченным диапазоном работы.
Содержание
- 1 Накапливающие и абсолютные датчики угла поворота
- 2 Оптические датчики угла поворота
- 3 Магнитные датчики угла поворота
- 4 Механические и оптические ДУП с последовательным выходом
- 5 Примечания
- 6 См. также
- 7 Ссылки
Накапливающие и абсолютные датчики угла поворота [ править | править код ]


Накапливающие ДУП, на выходе формируют импульсы, по которым принимающее устройство определяет текущее положение вала путём подсчёта числа импульсов счётчиком. Сразу же после включения накапливающего ДУПа положение вала неизвестно. Для привязки системы отсчёта к началу отсчёта накапливающие датчики имеют нулевые (референтные) метки, через которые нужно пройти после включения оборудования. К недостаткам такого типа датчиков угла положения также относится то, что невозможно определить пропуск импульсов от ДУПа по каким-либо причинам. Это приводит к накоплению ошибки определения угла поворота вала до тех пор, пока не будет пройдена нуль-метка. Для определения направления вращения применяются два измерительных канала («синусный» и «косинусный»), в которых идентичные последовательности импульсов (меандр) сдвинуты на 90° относительно друг друга.
Абсолютные ДУП выдают на выходе сигналы, которые можно однозначно интерпретировать как угол поворота вала датчика угла. Датчики угла этого типа не требуют привязки системы отсчёта к какому-либо нулевому положению.
Оптические датчики угла поворота [ править | править код ]
Оптические ДУП имеют жёстко закреплённый на валу стеклянный диск с оптическим растром. При вращении вала растр перемещается относительно неподвижного растра, при этом модулируется световой поток, принимаемый фотодатчиком. Абсолютные оптические датчики угла — это датчики угла поворота, в которых каждому положению вала соответствует цифровой выходной код, который наряду с числом оборотов является основным рабочим параметром датчика. Абсолютные оптические ДУП, так же как и накапливающие, считывают и фиксируют параметры вращения оптического диска.
Магнитные датчики угла поворота [ править | править код ]
Магнитные ДУП регистрируют прохождение магнитных полюсов вращающегося магнитного элемента непосредственно вблизи чувствительного элемента, преобразуя эти данные в соответствующий цифровой код или сигнал.

Механические и оптические ДУП с последовательным выходом [ править | править код ]
Содержат диск из диэлектрика или стекла с нанесёнными выпуклыми, проводящими или непрозрачными участками. Считывание абсолютного угла поворота диска производится линейкой переключателей или контактов в случае механической схемы и линейкой оптронов в случае оптической. Выходные сигналы представляют собой код Грея, позволяющий избавиться от неоднозначности интерпретации сигнала. Основным недостатком механического ДУПа является дребезг контактов, который может приводить к неправильному подсчёту и определению направления вращения. Оптические и магнитные ДУП лишены данного эффекта.
Энкодер: мастхэв производственной линии
Всем привет! Кто меня не знает — я представлюсь: автор блога об электрике и электронике SamElectric.ru, активно практикующий электрик и электронщик Александр Ярошенко. Как обычно, мои статьи на страницах этого журнала тесно связаны с промышленным оборудованием. На этот раз я подробно рассматриваю энкодер — устройство, без которого не обходится ни одна солидная производственная линия.
Что такое энкодер?
Я обслуживаю парк промышленного оборудования, в котором широко применяются энкодеры. Об этом сегодня и поговорим. Разберем подключение и монтаж энкодеров, а напоследок — несколько реальных случаев их применения.
Надеюсь, что все читатели знают, что такое энкодер. На всякий случай напомню, что это электронное устройство, которое позволяет измерять скорость вращения, угловое положение либо направление вращения. Можно сказать иначе, энкодер — это датчик, который выдает сигнал в зависимости от угла его поворота.
Теоретически энкодеры бывают двух видов — инкрементальные и абсолютные. Абсолютные нужны там, где в любой момент времени (в том числе в момент подачи питания) нужно знать точное положение объекта. Но сейчас, с использованием обработки при помощи контроллеров, абсолютные энкодеры практически не используются. Тем более учитывая, что их цена в несколько раз выше, чем у инкрементальных энкодеров.
Одному полному обороту энкодера обычно соответствует 1024 различных уровня сигнала, они говорят о его угловом положении. В более совершенных моделях на один оборот приходится 2048 или даже 4096 секторов.
Как подключаются энкодеры
Подключить энкодер легко — ведь это фактически датчик с транзисторными выходами. В простейшем случае выход энкодера можно подключить ко входу счетчика, и запрограммировать его на измерение скорости.
Но чаще всего выходные сигналы энкодера обрабатываются в контроллере. А далее путем расчетов можно получить информацию о скорости, направлении вращения, ускорении, положении объекта.
Энкодеры подключают не только к контроллеру. Он также может подключаться к преобразователю частоты, питающему электродвигатель. Таким образом, появляется возможность точного позиционирования, а также поддержания нужной скорости и момента вращения двигателя без использования контроллера.
Монтаж энкодеров
По монтажу сразу скажу главное — вал энкодера должен быть надежно зафиксирован! Бывали случаи, когда из-за проскальзывания самодельных и даже штатных муфт глючили производственные линии, и мы долго не могли найти причину — ведь все остается исправным!
Вал энкодера никогда не будет соосным с вращающимся валом (вспомните, для чего нужен карданный вал). Поэтому используются специальные заводские переходные муфты, нужно надежно их крепить и периодически проверять качество монтажа.
Корпус любого энкодера всегда неподвижен. Вращается только его внутренняя подвижная часть
Существуют энкодеры с полым валом, которые надеваются непосредственно на измеряемый вал и там фиксируются. Там даже нет такого понятия, как несоосность. Их гораздо проще монтировать, и они надежнее в эксплуатации. Чтобы энкодер при этом не прокручивался, используется лишь металлический поводок. На фото ниже показан энкодер с полым валом (обозначен В21.1), надетый на вал редуктора.
 Энкодер с полым валом
Энкодер с полым валом
Производители энкодеров
Среди российских производителей энкодеров мне известен лишь только Питерский СКБ ИС, который производит энкодеры марки ЛИР. К сожалению, российского промышленного оборудования сейчас почти не производится, и ЛИРы применяются лишь в военном и лабораторном оборудовании.
По этой причине я имею дело только с энкодерами зарубежного производства. Производителей энкодеров много — их производят почти все производители полупроводниковых датчиков. Чаще всего я встречаюсь с энкодерами Autonics — как и в случае с датчиками, в России представлен большой ассортимент. Другие известные мне производители энкодеров — немецкий Sick, японский Omron, и несколько китайских брендов.
Использование тех или иных марок энкодеров обусловлены часто не техническими причинами, поскольку их параметры и надежность практически идентичны. Тут, скорее, политические мотивы — производители комплектующих любыми путями стараются, чтобы их продукция вошла в состав больших производственных линий, чтобы таким образом закрепиться на рынке.
Рассмотрим несколько примеров использования энкодеров в реальном оборудовании.
Измерение скорости полотна
В данном примере, инкрементальный энкодер ELCO используется для измерения скорости бумажного полотна при производстве бумаги. Энкодер закреплен на бумаговедущем валу через муфту, скорость вращения которого однозначно говорит о скорости бумаги.
Минус такой установки — при механической поломке вала (а это бывало уже не раз, изнашиваются подшипники) ломается либо муфта, либо сам энкодер.
При помощи системы «энкодер+контроллер» можно вычислить мгновенную скорость, а также погонную длину произведенной продукции
Положение деталей на конвейере
В этом случае энкодер насажен на вал двигателя, подключенного через преобразователь частоты. Двигатель через редуктор передает движение на конвейер, по которому движутся заготовки деталей.
 Энкодер на роторе двигателя
Энкодер на роторе двигателя
С помощью энкодера и оптических датчиков, фиксирующих просвет между образцами продукции, контроллер с большой точностью может управлять обработкой деталей.
По моему мнению, насаживание энкодера на вал двигателя — не очень хорошая идея в смысле того, что энкодер крутится на больших оборотах (до 3000 об/мин). Кроме повышенного механического износа, необходимо предусмотреть обработку сигналов со сравнительно высокой скоростью. Но сегодня, с развитием промышленной электроники, это не проблема.
Крепление энкодера на валу двигателя позволяет очень точно контролировать скорость привода. С появлением высокооборотистых энкодеров многие производители наладили выпуск двигателей со встроенным энкодером
Перемещение детали
Еще большую точность, чем в предыдущем случае, можно получить, если вал энкодера закрепить на ходовой винт с резьбой.
 Направляющая, ходовой винт, кабель к энкодеру (сверху вниз)
Направляющая, ходовой винт, кабель к энкодеру (сверху вниз)
Если на ходовой винт закрепить гайку, которая механически скреплена с перемещаемой деталью (в реальном примере это — металлическая заготовка), то с помощью энкодера можно до долей миллиметра узнать ее положение. Точность вычисления будет зависеть от шага резьбы и разрешающей способности энкодера.
Минус такого решения — при большой скорости возможен «промах», и нужно либо уменьшать скорость при приближении к цели, либо постоянно двигаться на низкой скорости.
Перемещение упора
 Зубчатая передача
Зубчатая передача
Задача стоит в принципе такая же, как и в предыдущем случае. Но тут другой принцип перемещения — за счет зубчатой передачи.
Плюс данной реализации в том, что энкодер насажен непосредственно на зубчатое колесо, которое осуществляет передачу вращения.
При большом разрешении энкодера и отсутствии механических люфтов можно добиться очень высокой точности позиционирования.
Использование энкодера совместно с винтовой и зубчатой передачей позволяет достичь высокой точности обработки деталей в станках с ЧПУ
Вычисление точной координаты
В производстве полиграфической продукции иногда нужно нанести клей (или краску) в точное место. Когда печатная продукция (например, коробки или конверты) движутся по ленточному конвейеру, при помощи оптического датчика определяется начало, затем контроллер при помощи энкодера вычисляет нужную координату, и включает подачу клея.
 Вычисление точной координаты
Вычисление точной координаты
Формируется клеевая дорожка нужной длины, затем клей выключается. Далее коробка подается на фальцовочный узел, где складывается и склеивается. При этом скорость работы линии может достигать до 300 коробок в минуту.
Системы дозирования
Для точного открытия заслонки в системе дозирования жидкостей служит система, состоящая из двигателя с редуктором, на вал которого с одной стороны закреплена задвижка, с другой — энкодер.
 Поворот вала
Поворот вала
Поворот вала редуктора на угол не более 180° ограничен датчиками приближения, а точное положение определяется по сигналу от энкодера. В исходном состоянии задвижка закрыта, и датчик минимального положения активен. Это состояние принимается за ноль. Далее включается двигатель, и вал поворачивается. Точный угол поворота пропорционален количеству импульсов от энкодера обратной связи. В данном случае энкодер не делает полный оборот, его движение ограничено датчиками.
Подытожим
Энкодер является самым распространенным «измерительным инструментом» в современном промышленном оборудовании. Точнее (и дороже) его — только сервоприводы.
Новый абсолютный многооборотный энкодер от maxon ENX22EMT
В ближайшее время ассортимент энкодеров, предлагаемых компанией maxon, пополнится новым многооборотным абсолютным энкодером. Этот новый энкодер использует технологию сбора энергии на основе эффекта Виганда для обеспечения питанием цепей подсчёта импульсов. Это означает, что новый многооборотный энкодер не требует внешней батареи или громоздкого редуктора для подсчёта количества оборотов.
Новый энкодер ENX22EMT может подсчитывать количество оборотов в пределах 16 бит (65536 оборотов) без дополнительной электроники. Все цепи подсчёта импульсов интегрированы в энкодер и обеспечиваются питанием при помощи датчика Виганда. Энкодер использует вращение вала двигателя, чтобы генерировать энергию для питания электронных цепей. Дополнительной батареи или источника питания не требуется.
Ещё одна особенность этого энкодера – это высокое разрешение: 17 бит абсолютного разрешения на один оборот. Энкодер доступен с протоколом BiSS-C или SSI. Он может быть использован для определения положения ротора для коммутации в бесколлекторных двигателях.
Новый энкодер имеет уникально маленькие размеры. Его диаметр 22 мм, а длина – 24 мм, что делает его одним из самых маленьких энкодеров своего класса на рынке. Вместе с широким ассортиментом компактных двигателей, редукторов, винтовых передач и тормозных муфт maxon, этот энкодер открывает новые сферы применения для высокоточных приводных систем.
Сочетания с другими компонентами
Начиная с весны 2021 года новый датчик будет устанавливаться на приводах серии IDX и всех двигателях серии EC-4pole. В дальнейшем планируется устанавливать энкодер на бесколлекторные двигатели серии EC-i и коллекторные двигатели серии DCX (диаметром от 22 мм).
Доступность
С апреля 2021 года энкодер ENX22EMT будет включён в каталог maxon motor. Сборки с двигателями EC-4pole будут доступны как каталожные изделия. Привода серии IDX будут доступны с новым энкодером по запросу.
- Санкт-Петербург, Пионерская улица, 30 «B», офис 306
- +7 (812) 317-77-93
- sales@innodrive.ru
- Innodrive © 2021
- Решения
- Новости
- О компании
- Доставка и оплата
- Статьи
- Контакты
- Карта сайта
Нельзя добавить товар к сравнению. Вы уже добавили к сравнению товар из категории « XXX». Очистите список сравнения и попробуйте ещё раз.
Товар успено добавлен в корзину
- Москва
- Санкт-Петербург
- Новосибирск
- Екатеринбург
- Казань
- Нижний Новгород
- Челябинск
- Самара
- Омск
- Ростов-на-Дону
- Уфа
- Красноярск
- Воронеж
- Пермь
- Волгоград
- Краснодар
- Саратов
- Тюмень
- Тольятти
- Ижевск
- Барнаул
- Ульяновск
- Иркутск
- Хабаровск
- Ярославль
- Владивосток
- Махачкала
- Томск
- Оренбург
- Кемерово
Извини, ничего не нашлось
Ваш заказ Ваша корзина пуста
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Спасибо, ваше сообщение отправлено. Мы ответим вам как только сможем.
Энкодер магнитный Pololu 12 CPR 2,7-18В для мотор-редуктора MR12 (пара)




















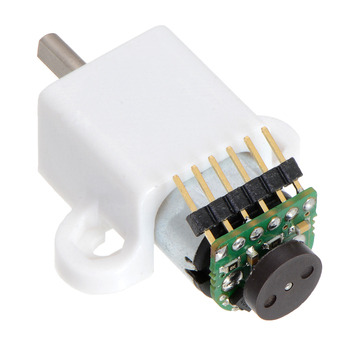
Добавьте квадратурные энкодеры к вашим металлическим микро мотор-редукторам (требуется удлиненный задний вал) с этим комплектом, который использует магнитные диски и сенсоры эффекта холла, чтобы обеспечить 12 отсчетов за оборот вала двигателя. Датчики работают от 2,7 В до 18 В и обеспечивают цифровые выходы, которые могут быть подключены непосредственно к микроконтроллеру или другой цифровой цепи. Эти энкодеры имеют выводы в виде сквозных отверстий с шагом 2 мм, и для их использования необходимо припаять провода или разъемы с шагом 2 мм. Этот модуль совместим со всеми мотор-редукторами имеющими дополнительный удлиненный вал двигателя, такими как Gekko MR12 и Pololu.
Описание:
Этот комплект включает в себя две двухканальные платы датчиков Холла и два 6-полюсных магнитных диска, которые можно использовать для добавления квадратурного кодирования к двум металлическим микро мотор-редукторам с удлиненными задними валами (двигатели не входят в комплект этого комплекта). Плата энкодера воспринимает вращение магнитного диска и обеспечивает разрешение 12 отсчетов за оборот вала двигателя при подсчете обоих краев обоих каналов. Чтобы вычислить количество оборотов на выходном валу редуктора, умножьте передаточное число на 12.

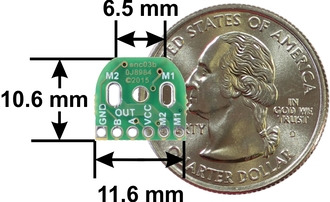
Этот компактный энкодер отлично вписывается в пределах поперечного сечения 12 мм x 10 мм двигателя на трех из четырех сторон, и он выступает только на 0,6 мм от края четвертой стороны (обратите внимание: если вам нужно, чтобы он был на одном уровне с последней стороной, вы можете осторожно немного отломить от платы и припаять к оставшимся полуотверстиям). Модуль не заходит за конец удлиненного вала двигателя, который выступает на 5 мм за пластиковую торцевую заглушку на задней части двигателя.
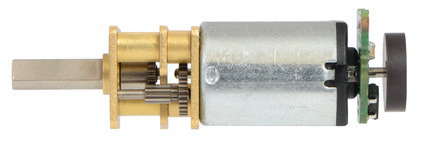
Плата энкодера предназначена для припаивания непосредственно к задней части двигателя, при этом задний вал двигателя проходит через отверстие в середине печатной платы. Один из способов добиться хорошего выравнивания между модулем и двигателем — это закрепить плату на одном контакте двигателя и припаять другому контакту только тогда, когда плата хорошо выпрямлена и выровнена. Будьте осторожны, чтобы избежать длительного нагрева контактов двигателя, это может привести к деформации пластиковой торцевой крышки двигателя или щеток двигателя. После того, как плата припаивается к двум контактам двигателя, провода для двигателя подключаются к контактным площадкам M1 и M2 по краю платы; остальные четыре контактные площадки используются для питания датчиков и доступа к двум квадратурным выходам.
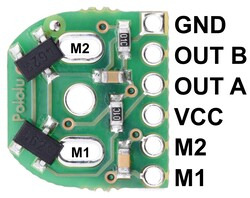
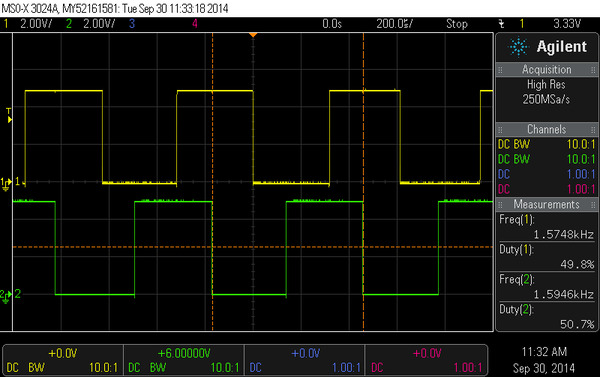
Датчики питаются через контакты VCC и GND. VCC может быть от 2,7 до 18 В, а квадратурные выходы A и B — это цифровые сигналы, которые либо подаются на низком уровне (0 В) с помощью датчиков, либо вытягиваются на VCC через подтягивающие резисторы 10 кОм в зависимости от применяемого магнитного поля. Компараторы датчиков имеют встроенный гистерезис, который предотвращает ложные сигналы в тех случаях, когда двигатель останавливается вблизи точки перехода.
Шесть контактных площадок платы имеют шаг 2 мм, поэтому они не совместимы с обычными 2,54 мм разъемами. Одним из вариантов подключения к плате является припаивание отдельных проводов.

В качестве альтернативы вы можете припаять к плате разъем с шагом 2 мм. В приведенном выше примере показана штырьевая вилка, которая даст вам возможность сделать отсоединяемый кабель, оканчивающийся 6-контактным гнездом с шагом 2 мм. Если контакты расположены под углом к двигателю, как показано на рисунке, они будут едва выступать через отверстия в плате. Обратите внимание, что в этой ориентации есть место для подключения 6-контактного гнезда, даже когда используется Держатель удлиненный Pololu для мотор-редуктора MR12.
Если штырьки направлены от двигателя, они должны быть под углом, чтобы они не задевали магнитный диск. Имея приличный паяльник, можно припаять их в этой ориентации даже после того, как датчик установлен на двигателе.
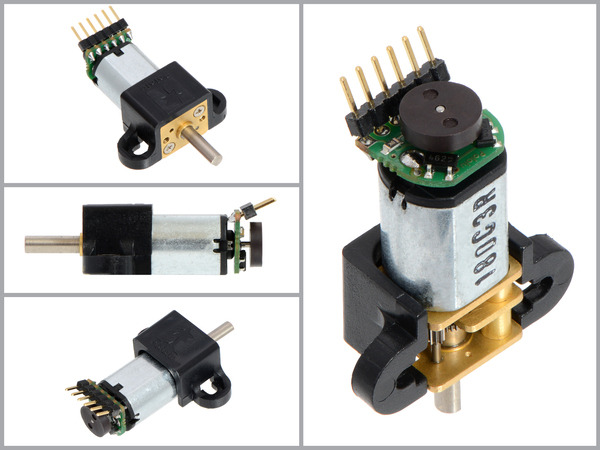
После того, как плата припаяна к двигателю, диск магнитного энкодера можно вставить на вал двигателя. Один простой способ добиться этого — положите магнитный диск на плоскую поверхность, возьмите двигатель и вставьте вал в отверстие на диске, затем нажмите на двигатель, пока вал не упрется в эту поверхность. Размер зазора между диском энкодера и платой датчика не оказывает большого влияния на характеристики, если вал двигателя по крайней мере полностью проходит через диск.
Принципиальная схема:
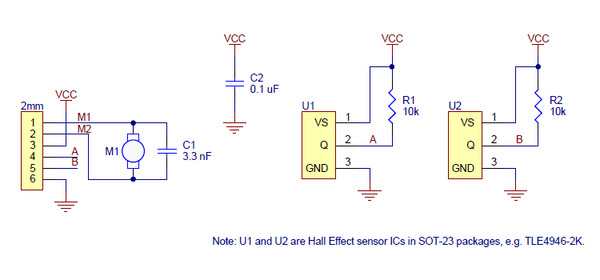
Эта схема также доступна для скачивания в формате pdf (125 КБ pdf).
Данный перевод является собственностью интернет-магазина Robototehnika.ru
3D-модели магнитного энкодера Pololu 12 CPR 2,7-18В для микро мотор-редуктора (585k zip)
Этот файл содержит 3D-модели (в формате STEP) магнитного энкодера Pololu 12 CPR 2,7-18В для микро мотор-редуктора
Характеристики
| Артикул | 04040201 |
- С товаром покупают (3)

