Гистерезисный двигатель принцип работы
Гистерезисный двигатель принцип работы
Гистерезисные синхронные двигатели. Принцип действия и основные характеристики
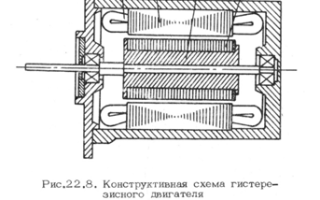
Гистерезисный двигатель отличается от других типов машин с круговым вращающимся магнитным полем конструкцией ротора (рис. 1 (а)). Он представляет собой полый цилиндр или пакет, собранный из колец магнитотвердого материала (1), насаженный на цилиндрическую втулку (2) из магнитного или немагнитного материала, закрепленную на валу ротора (3).
Пакет колец ротора называется активным слоем, и происходящие в этом слое процессы определяют свойства гистерезисного двигателя. Материал для активного слоя выбирают с петлей гистерезиса близкой к прямоугольной форме. На рис. 1(б) сплошной линией показана такая петля и для сравнения штриховой линией дана петля обычной электротехнической стали.
Принципиальным отличием гистерезисного двигателя от синхронного двигателя с постоянными магнитами заключается в том, что активный слой ротора намагничивается магнитным полем статора при пуске, поэтому в дальнейшем он может перемагничиваться этим же полем. Однако его намагниченность меньше намагниченности постоянных магнитов, поэтому он работает в режиме недовозбуждения.
Принцип работы гистерезисного двигателя поясняет рисунок 2. В синхронном режиме, т.е. когда ротор вращается со скоростью магнитного поля, материал ротора намагничен и машина работает как синхронный двигатель с постоянными магнитами. При отсутствии нагрузки на валу (рис. 2 (а)) поля ротора и статора взаимодействуют с силой F , направленной под разноименными полюсами встречно и в сумме равной нулю. Возникновение тормозного момента на валу приведет к расхождению осей магнитных полей на угол и появлению электромагнитного момента, компенсирующего момент нагрузки (рис. 2 б)). Такая картина процессов в двигателе полностью идентична работе двигателя с постоянными магнитами на роторе. Однако при дальнейшем увеличении нагрузки на валу угол увеличится до угла магнитного запаздывания (рис. 2 в)). Материал ротора начнет перемагничиваться и ось его магнитного поля будет смещаться вслед за полем статора, сохраняя при этом постоянное значение угла нагрузки и, следовательно, постоянное значение электромагнитного момента. Вал ротора в этом режиме может вращаться с любой скоростью меньше синхронной, т.е. двигатель будет работать в асинхронном режиме.
Наглядно представить такой процесс можно с помощью механической модели показанной на рисунке 3. Здесь поля статора и ротора представлены постоянными магнитами. Магнит ротора лежит на диске и удерживается на нем силой трения. Если поле статора вращается со скоростью и момент на валу диска равен нулю (рис. 3 а)), то магнит ротора также будет вращаться со скоростью , передавая вращение диску за счет момента трения. Угол между осями магнитов при этом будет равен нулю. Возникновение нагрузочного момента на валу диска приведет к расхождению осей полюсов магнитов и появлению электромагнитного момента, компенсирующего нагрузочный момент (рис. 3 б)). Диск и магнит ротора будут вращаться синхронно, удерживаемые в зацеплении моментом сухого трения . Если нагрузочный момент увеличится и станет больше момента трения (рис. 3. в)), то магнит ротора будет проскальзывать по поверхности диска, вращаясь при этом с синхронной скоростью вслед за полем статора. Магнит ротора не выйдет из синхронизации, т.к. при этом . Момент сухого трения, действующий на магнит ротора, не зависит от скорости вращения, поэтому угол нагрузки будет оставаться постоянным и равным некоторому значению , определяемому параметрами момента трения (коэффициентом трения, силой прижатия магнита к диску и т.п.). Таким образом, магниты (поля) статора и ротора будут работать в синхронном режиме, а вал двигателя – в асинхронном.
Максимально возможный момент , передаваемый гистерезисным двигателем нагрузке, определяется свойствами материала активного слоя ротора. Эти свойства, в частности, отражаются формой петли гистерезиса. У материала с прямоугольной петлей гистерезиса угол магнитного запаздывания . Материал с нулевой площадью петли имеет . Чем больше значение , тем больше величина гистерезисного момента при прочих равных условиях. Современные материалы активного слоя имеют .
Постоянный электромагнитный момент гистерезисного двигателя в асинхронном режиме, т.е. от нулевой до синхронной скорости вращения, является их главным преимуществом по отношению к другим типам машин. Это единственная синхронная машина, обладающая свойством самозапуска.
Описанные выше свойства двигателя находят отражение в механической и угловой характеристиках представленных на рис. 4. Механическая характеристика в двигательном режиме, помимо участка синхронной работы 1-3, имеет также асинхронный участок 3-5. На участке 3-5 происходит перемагничивание активного слоя ротора и электромагнитный момент равен гистерезисному моменту . На участке 1-3 машина работает как синхронный двигатель с постоянными магнитами и угловой характеристикой . Точка 3 характеристик соответствует выходу из синхронизма, после чего начинает изменяться и неограниченно возрастать.
Принципиально гистерезисный двигатель может работать как в синхронном, так и в асинхронном режиме, однако работа в асинхронном режиме неэкономична, т.к. потери на перемагничивание возрастают с частотой скольжения.
Помимо самозапуска, к достоинствам гистерезисного двигателя можно отнести: простоту и надежность конструкции; бесшумность; большой пусковой момент ; плавность входа в синхронизм; относительно высокий КПД; малую кратность пускового тока ( ).
Недостатками являются; низкий коэффициент мощности (0,4-0,5) и высокая стоимость.
Принцип действия и особенности конструкции гистерезисного двигателя, механическая характеристика.
Г 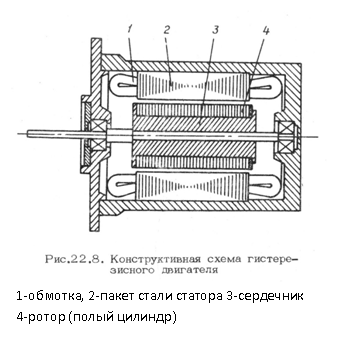 истерезисным двигателем называют синхронный двигатель, вращающий момент которого создается за счет явления гистерезиса при перемагничивании ферромагнитного материала ротора. Статор в гистерезисном двигателе (рис. 7.12, а) выполняется так же, как и в других машинах переменного тока; обмотка статора может быть трех- или двухфазной (с конденсатором в одной из фаз). Ротор двигателя (рис. 7.12,б) представляет собой стальной цилиндр, выполненный из магнитно-твердого материала (имеющего широкую петлю гистерезиса) без обмотки. Применение обычной электротехнической стали для изготовления ротора не позволяет получить достаточно большой электромагнитный момент, поэтому используют специальные магнитно-твердые сплавы. Для экономии дорогих специальных сплавов роторы гистерезисных двигателей выполняют сборными: в виде массивного или шихтованного (из отдельных изолированных пластин) кольца из кобальтовой стали, насаженного на стальную или алюминиевую втулку.
истерезисным двигателем называют синхронный двигатель, вращающий момент которого создается за счет явления гистерезиса при перемагничивании ферромагнитного материала ротора. Статор в гистерезисном двигателе (рис. 7.12, а) выполняется так же, как и в других машинах переменного тока; обмотка статора может быть трех- или двухфазной (с конденсатором в одной из фаз). Ротор двигателя (рис. 7.12,б) представляет собой стальной цилиндр, выполненный из магнитно-твердого материала (имеющего широкую петлю гистерезиса) без обмотки. Применение обычной электротехнической стали для изготовления ротора не позволяет получить достаточно большой электромагнитный момент, поэтому используют специальные магнитно-твердые сплавы. Для экономии дорогих специальных сплавов роторы гистерезисных двигателей выполняют сборными: в виде массивного или шихтованного (из отдельных изолированных пластин) кольца из кобальтовой стали, насаженного на стальную или алюминиевую втулку.
Ротор гистерезисного двигателя намагничивается под действием магнитного поля статора. При синхронной частоте вращения ротор неподвижен относительно вращающегося магнитного поля статора и ось магнитного поля ротора отстает от оси поля статора на угол θг , вследствие чего возникают тангенциальные составляющие fт сил взаимодействия между ротором и статором (рис. 7.13, а) и вращающий момент Мг . Таким образом, режим работы гистерезисного двигателя при синхронной частоте вращения не отличается от режима аналогичного синхронного двигателя с постоянными магнитами. Максимальное значение угла θг , определяется только свойствами материала ротора; этим же определяется и значение максимального момента Мг в синхронном режиме. Чем шире петля гистерезиса ферромагнитного материала ротора, тем больше угол θг и гистерезисный момент Мг . При асинхронном режиме ротор перемагничивается — при неизменном угле θг и неизменном гистерезисном моменте.
П 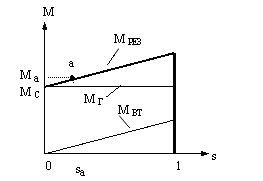 ри пуске двигателя, когда частота вращения ротора не равна п1 , кроме гистерезисного момента Мг появляется также асинхронный момент Мас , возникающий в результате взаимодействия вращающегося магнитного поля с вихревыми токами индуцируемыми этим полем в роторе. Так как ротор имеет большое активное сопротивление, то зависимость Мас = f(s) близка к линейной, и асинхронный момент имеет максимальное значение при s = 1, т. е. так же, как и в асинхронном
ри пуске двигателя, когда частота вращения ротора не равна п1 , кроме гистерезисного момента Мг появляется также асинхронный момент Мас , возникающий в результате взаимодействия вращающегося магнитного поля с вихревыми токами индуцируемыми этим полем в роторе. Так как ротор имеет большое активное сопротивление, то зависимость Мас = f(s) близка к линейной, и асинхронный момент имеет максимальное значение при s = 1, т. е. так же, как и в асинхронном
Гистерезисные микродвигатели могут работать в синхронном и асинхронном режимах. В этом легко убедиться, рассматривая рисунок. Пока момент нагрузки не больше МС, СГМД работает как синхронный двигатель (его скольжение равно 0). При больших нагрузках он переходит в асинхронный режим (точка а). Причем переход из одного режима в другой и обратно происходит плавно, без рывков, что является одним из достоинств СГМД.
5. ПРИНЦИП ДЕЙСТВИЯ ГД
На трехфазную обмотку статора подается переменное напряжение и создается вращающееся магнитное поле (подобно тому, как это происходит в трехфазных АД). Будем характеризовать его вектором МДС Fs, совпадающим с вектором Ф1.
Рис. 3 — Пояснение принципа действия ГД [5]
Под действием внешнего поля ротор намагнитится по оси обмотки, т.е. его элементарные магнитики (домены, размер которых не превышает 0,01 мм) сориентируются по полю и займут положение, показанное на рис.3а [5]. Вектора Fs и Bр совпадут.
При повороте поля (вектора Fs) статора (рис.3б) вслед за ним будут стремиться повернуться домены ротора (то есть ось намагниченных элементарных магнитиков, формирующих полюса ротора ГД, то есть вектор Вр). Однако вследствие явления гистерезиса вектор Вр хоть и будет вращаться со скоростью вращения поля статора (вектора Fs), но будет отставать от него на некоторый угол . Силы магнитного притяжения в этом случае будут иметь тангенциальные составляющие, которые и создадут вращающий момент, стремящийся увлечь ротор за полем статора. Этот момент называется гистерезисным [5].
Выражение для гистерезисного момента:
Значения Fs, Bр и от угловой скорости ротора не зависят. Как следствие, не зависит от угловой скорости ротора и значение вращающего гистерезисного момента Мга.
Значение Fs определяется током статора и числом витков в обмотке.
Значение Bр определяется МДС статора Fs и толщиной активного слоя. При ограниченном значении Fs толщину слоя не следует брать большой, иначе снизится индукция Bр и развиваемый ГД момент. И расход дорогостоящего материала будет неоправданным [9].
Угол определяется коэрцитивной силой материала ротора Нс. Чем больше Нс (то есть чем шире петля гистерезиса), тем сильнее должно изменяться внешнее поле, прежде чем начнет изменяться направление поля элементарных магнитиков [8]. У материала с прямоугольной петлей гистерезиса угол магнитного запаздывания =90 град. Материал с нулевой площадью петли имеет =0 град. Современные материалы активного слоя имеют =30-60 град [4], 30-50 град [2], микродвигатели 20?25 град [5,7]. Отметим, что угол , с которым ГД работает в асинхронном режиме, равен макс, с которым ГД может работать в синхронном режиме. О нем мы поговорим ниже.
Итак, первый режим работы ГД, с которым он работает при разгоне — это асинхронный режим. В этом режиме ротор вращается с меньшей скоростью, чем поле статора (?
Похожие главы из других работ:
4.1 Принцип действия
Как уже указывалось, существуют две разновидности дуговой плавки — плавка с нерасходуемым электродом и с расходуемым электродом. При плавке катод, представляющий собой водоохлаждаемый стержень, изготовленный из вольфрама или графита.
5. ПРИНЦИП ДЕЙСТВИЯ ГД
На трехфазную обмотку статора подается переменное напряжение и создается вращающееся магнитное поле (подобно тому, как это происходит в трехфазных АД). Будем характеризовать его вектором МДС Fs, совпадающим с вектором Ф1. Рис.
1.3 Принцип действия
Динамические насосы представляют собой насосы, в которых жидкость перемещается под силовым воздействием рабочих органов на нее в камере, постоянно сообщающейся со входом и выходом колеса.
5.3 Принцип действия
Сенсор генерирует СВЧсигнал, представляющий собой электромагнитную волну, а именно две совместно распространяющихся перпендикулярных волны (электрического и магнитного полей).
1.1 Принцип действия
Наибольшее распространение для измельчения полезных ископаемых получили барабанные (шаровые и стержневые) мельницы.
1.1 Принцип действия
1.2 Принцип действия РП
При полете управляемой ракеты набегающий поток воздуха через носовой воздухозаборник, теплообменник и распределительное устройство проходит в рабочие полости РМ. С блока усилителей сигнал ошибки.
3.3 Принцип действия
Работа дробилки осуществляется следующим образом. Сырьё через загрузочное отверстие подаётся в корпус, где попадает под удар молотков, при этом сырье частично измельчается и отбрасывается на бронеплиты.
2.1 Принцип действия
В центробежных насосах всасывание и нагнетание жидкости происходит под действием центробежной силы, возникающей при вращении заключенного в корпус колеса с лопатками (рис. 2.1).
3.1 Принцип действия
Кожухотрубчатые теплообменники различных конструкций — наиболее распространённый тип теплообменных аппаратов. Они состоят из пучка труб, концы которых закреплены в специальных трубных решетках путем развальцовки, сварки, пайки.
4.1 Принцип действия
Насадочный абсорбер показан на рисунке 4.1. 1 — насадка; 2 — решетка; 3 — распределительный стакан (брызгалка); 4 — направляющий конус. Рисунок 4.1. — Насадочный абсорбер Насадка опирается на решетки.
6. ПРИНЦИП ДЕЙСТВИЯ САР
В курсовом проекте должна быть приведена функциональная схема САУ привода ТП — Д с реверсом преобразователя, ее принцип действия.
3. Принцип действия
Сушильная установка А1 — ОРЧ предназначена для сушки сгущенного обезжиренного и сгущенного цельного молока, а также заменителей цельного молока с содержанием жира до 30%. Применяется на предприятиях молочно-консервных.
7.1. Принцип действия.
Дуга — мощный стабильный разряд электричества в ионизированной атмосфере газов и паров металла. Ионизация дугового промежутка происходит во время зажигания дуги и непрерывно поддерживается в процессе ее горения.
7.1. Принцип действия.
Дуга — мощный стабильный разряд электричества в ионизированной атмосфере газов и паров металла. Ионизация дугового промежутка происходит во время зажигания дуги и непрерывно поддерживается в процессе ее горения.
Синхронные двигатели малой мощности (микродвигатели)
В чем основное отличие синхронных двигателей малой мощности (микродвигателей) от асинхронных моторов?
- Их ротор является магнитом или электромагнитом малой мощности, а у маломощных агрегатов он не имеет обмотки возбуждения и щеток.
- Токовая фаза может заметно опережать фазу напряжения.
- Частота вращения постоянна и не зависит от нагрузки.
В целом на ротор из твердых магнитных материалов однократно воздействуют сильным импульсным полем, намагничивая его. Намагниченность полюсов сохраняется надолго. Если магнит изготовлен из мягкого материала, ротору придается соответствующая форма для того, чтобы магнитопровод обладал разным радиальным магнитным сопротивлением. Двигатели с постоянным магнитом имеют цилиндрический ротор из твердого магнитного материала. Их стартовая обмотка коротко замкнута.
Принципы работы синхронных двигателей малой мощности (микродвигателей)
При запуске такой двигатель действует по принципу асинхронного, возбуждаясь от поля постоянных магнитов в крутящемся роторе. Из-за этого в обмотке статора возникает эдс с непостоянной частотой. Она создает токи, вызывающие тормозящий момент. Достигнув скорости синхронизма, двигатель перестает быть в асинхронном состоянии, после чего входит в свой обычный режим синхронизма с соответствующей скоростью. Такие синхронные двигатели малой мощности (микродвигатели) используются в фототехнике, бытовых устройствах, часовых механизмах, в автоматике и т.д.
Синхронный реактивный мотор
Он оснащен равнополюсным ротором. Имеет стартовую обмотку и изготавливается из особой листовой стали. Короткозамкнутой обмоткой является заливка алюминиевым или другим диамагнетиком.
Мощность этих моторов обычно не превышает 100Вт, в целом, она в 2-3 раза ниже мощности двигателей с неизменными магнитами (хотя они проще в исполнении и дешевле). КПД от 0,35 до 0,4, а максимальный мощностной коэффициент – 0,5.
Реверсивные синхронные двигатели
Четыре катушки на обеих частях расщепленных полюсов заменяют у них короткозамкнутые витки. Закоротив одну из пар, достигают вращения вала в нужную сторону.
Синхронные гистерезисные моторы
Их роторы изготовлены из магнитотвердого сплава с широкой гистерезисной петлей, и их намагничивает вращающееся магнитное поле статора. Они могут действовать как синхронным, так и асинхронным способом.
Для них характерны:
- очень высокий пусковой момент;
- токовая конфигурация порядка 20-30% при переходе с холостого хода в режим КЗ;
- плавный вход в режим синхронизма.
Двигатели этого типа выгодно отличаются от реактивных простотой конструкции, надежностью и маломощностью в работе, а также небольшим размерам и весом. Их выпускают и на 50 герц, и на другие частоты. Обладая мощностью не более 400Вт, они бывают одно- и двухскоростными.
Реактивно-гистерезисные двигатели
Их статор явнополюсного типа находится внутри обмоточного каркаса. Продольный паз разрезает два полюса на магнитопроводе на одинаковые части. Редуктор соединяет выходной вал с ротором и уменьшает скорость вала до нескольких сот или десятков оборотов в минуту.
Шаговые моторы
Они превращают электронные импульсы управления в угол поворота, реализуемый дискретным способом. На магнитопроводе статора находятся 2 или 3 однообразные обмотки. Они сдвинуты в пространстве и поочередно подключаются к источнику прямоугольных импульсов. Ротор явнополюсного типа может быть как активным, так и реактивным. У активных роторов есть обмотка возбуждения и контактные щетки или неизменные магниты, чья полярность чередуется. Реактивным роторам все вышеизложенное не свойственно.