
Шаговый двигатель
Шаговый двигатель
Ша́говый электродви́гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток подаваемый в одну из обмоток статора вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора выполненного из магнито-мягкого (ферромагнитного) материала или из магнито-твёрдого (магнитного) материала. Шаговые двигатели с магнитным ротором позволяют получать бо́льший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8 — 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.

В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя. Производители современных шаговых электродвигателей гарантируют точность выставления шага без нагрузки до 5% от величины шага.
Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз.
Режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Качество изготовления современных шаговых двигателей позволяет повысить точность позиционирования в 10-20 раз.
Шаговые двигатели стандартизованы по посадочным размерам и размеру фланца: NEMA 17, NEMA 23, NEMA 34, . — размер фланца 42мм, 57мм, 86мм, 110мм соответственно. Шаговые электродвигатели NEMA 23 могут создавать крутящий момент до 18 кгс*см, NEMA 34 до 120 кгс*см и до 210кгс*см для двигателей с фланцем 110мм.

Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения. Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока в широком диапазоне напряжений.
Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ. В отличие от сервоприводов, шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков вращения.
Главное преимущество шаговых приводов — низкая цена, в среднем в 1,5-2 раза дешевле сервоприводов. Шаговый привод как недорогая альтернатива сервоприводу наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Wikimedia Foundation . 2010 .
- Шаговой искатель
- Шагинян
Смотреть что такое «Шаговый двигатель» в других словарях:
шаговый двигатель — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва] Тематики электротехника, основные понятия EN inching motorpecking motorquantizing motorstep motorstep by step… … Справочник технического переводчика
шаговый двигатель — žingsninis variklis statusas T sritis automatika atitikmenys: angl. step by step motor; stepper; stepping motor vok. Schrittmotor, m rus. шаговый двигатель, m pranc. moteur pas à pas, m … Automatikos terminų žodynas
линейный шаговый двигатель — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN linear pulse motor … Справочник технического переводчика
Шаговый электродвигатель — Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные… … Википедия
первичный двигатель — Любое устройство, обеспечивающее создание механической энергии, необходимой для выполнения управляющим устройством функции передачи; таким устройством может быть электрическое управляющее устройство, электрический клапан, механизм с электрическим … Справочник технического переводчика
ШД — шаговый двигатель шина данных … Словарь сокращений русского языка
Накопитель на гибких дисках — Не следует путать с НДМГ компонентом ракетного топлива. Накопитель на гибких дисках (англ. … Википедия
Форматирование диска — В этой статье не хватает ссылок на источники информации. Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена. Вы можете … Википедия
Сервопривод — Эту статью следует викифицировать. Пожалуйста, оформите её согласно правилам оформления статей … Википедия
Schrittmotor — žingsninis variklis statusas T sritis automatika atitikmenys: angl. step by step motor; stepper; stepping motor vok. Schrittmotor, m rus. шаговый двигатель, m pranc. moteur pas à pas, m … Automatikos terminų žodynas
Сервопривод или шаговый двигатель?
В случаях, когда необходима высокая точность работы исполнительных механизмов, используют асинхронный электродвигатель с энкодером обратной связи. Однако в промышленных станках с особыми требованиями к точности позиционирования подобное оборудование не справится с задачами в силу ряда конструктивных недостатков — низкого момента на малых скоростях, проскальзывания ротора, инерции при разгоне и торможении. В таких случаях используются сервоприводы и шаговые двигатели. Рассмотрим преимущества и недостатки обоих типов приводов.
Сервоприводы
 В состав сервопривода входят серводвигатель и электронный блок управления (сервоусилитель или сервопреобразователь). В качестве серводвигателей наиболее широко применяют синхронные трехфазные электродвигатели, в которых установлены мощные постоянные магниты для улучшения динамических характеристик. Обязательным компонентом сервопривода также является энкодер. Как правило, он превосходит по своим параметрам обычные энкодеры, поставляемые отдельно. Его разрешение может достигать сотен тысяч импульсов на оборот, за счет чего достигается сверхточное позиционирование. Для примера, разрешение встроенных энкодеров сервоприводов Delta ASD-A2 составляет 1 280 000 имп/об.
В состав сервопривода входят серводвигатель и электронный блок управления (сервоусилитель или сервопреобразователь). В качестве серводвигателей наиболее широко применяют синхронные трехфазные электродвигатели, в которых установлены мощные постоянные магниты для улучшения динамических характеристик. Обязательным компонентом сервопривода также является энкодер. Как правило, он превосходит по своим параметрам обычные энкодеры, поставляемые отдельно. Его разрешение может достигать сотен тысяч импульсов на оборот, за счет чего достигается сверхточное позиционирование. Для примера, разрешение встроенных энкодеров сервоприводов Delta ASD-A2 составляет 1 280 000 имп/об.
Сервоусилитель получает два сигнала управления — сигнал задания скорости (или угла поворота) и сигнал обратной связи с энкодера. В результате сервопривод обеспечивает движение какой-либо механической нагрузки с большой точностью не только по скорости вращения, но и по углу поворота, который может быть выдержан до долей градуса.
Шаговые двигатели
 Шаговый двигатель — это особый вид многофазного синхронного двигателя, дискретное вращение которого производится путем подачи импульсов напряжения на нужные обмотки статора. При этом ротор не имеет обмоток и состоит из магнитного материала.
Шаговый двигатель — это особый вид многофазного синхронного двигателя, дискретное вращение которого производится путем подачи импульсов напряжения на нужные обмотки статора. При этом ротор не имеет обмоток и состоит из магнитного материала.
Основной параметр шагового двигателя — его шаг, или количество шагов на оборот. Для одного полного оборота ротора необходимо строго определенное количество импульсов. Чем меньше шаг, тем большую точность позиционирования может обеспечить данный шаговый двигатель.
Управляющие импульсы формируются специальным драйвером, который получает задание с контроллера. При этом обратной связи не требуется, поскольку путем подсчета импульсов всегда можно узнать, на какой угол повернулся вал шагового двигателя, и сколько оборотов он сделал.
Преимущества сервоприводов
- Мощность серводвигателей может достигать 15 кВт, в то время как мощность шагового электродвигателя, как правило, не превышает 1 кВт.
- Бесшумность работы благодаря принципу действия и сверхточному исполнению конструкции.
- Скорость вращения в сервоприводах может достигать 10000 об/мин, в некоторых случаях и больше. У шаговых двигателей номинальная скорость вращения обычно не превышает 1000 об/мин вследствие падения момента и увеличения вероятности ошибок.
- Высокая энергоэффективность. Потребляемая мощность сервопривода пропорциональна нагрузке на валу. Для шагового электродвигателя потребляемая мощность одинакова вне зависимости от нагрузки.
- Наличие обратной связи обеспечивает точной информацией о повороте вала в любой момент времени. В шаговых двигателях возможно проскальзывание при перегрузке, накопление ошибки и потеря позиционирования.
- Большая плавность хода. В шаговых двигателях добиться плавности можно только путем применения специальных методов управления.
Преимущества шаговых двигателей
- Меньшая цена при одинаковой мощности в силу более простой конструкции двигателя и драйвера.
- Возможность работы на экстремально низких оборотах без ухудшения характеристик и применения редукторов.
- Более точное позиционирование, обусловленное конструкцией двигателя.
- Отсутствие необходимости в обратной связи.
- Для фиксации вала двигателя при останове достаточно снять с него напряжение. При останове серводвигателя необходимо расходовать мощность на удержание либо использовать электромеханический тормоз.
Применение
В промышленном оборудовании для выполнения задач позиционирования имеет смысл использовать и асинхронные двигатели с обратной связью, и сервоприводы, и шаговые двигатели.
Сервоприводы устанавливаются в тех узлах оборудования, где требуется точное позиционирование механизмов для их синхронизации с другими узлами. В частности сервоприводы широко используют в обрабатывающих станках.
Шаговые двигатели нашли наибольшее применение в станках с ЧПУ и в робототехнике.
На практике встречаются производственные линии, в которых в различных узлах используются все три типа электродвигателей.

Шаговые двигатели (также называемые шаговые двигатели) представляют собой электронные двигатели, которые предлагают точный контроль вращения. Шаговые двигатели отличаются высокой точностью (в среднем шаговый двигатель может превратиться в 0,9 до 1,8 градусов в каждую сторону) и в относительно высокой скорости вращения.
Шаговые двигатели могут быть найдены в различных типах аппаратных компонентов: принтеры (головка принтера перемещается влево и вправо с помощью шагового двигателя), сканеры, компьютерные жесткие диски, и так далее.
Демонстрация шагового двигателя
В этом видео вы можете увидеть короткая демонстрация возможностей движение шаговым двигателем. Обратите внимание на точную регулировку скорости и направления — это достигается за счет способности двигатели для перемещения в очень малых шагов.
Характеристики и преимущества шаговых двигателей
Есть несколько характеристик шаговых двигателей, которые сделали их привода выбора в большом числе приложений:
- Устройство может работать как в открытом цикле с точностью позиционирования + -1 шаг. Таким образом, чтобы вращаться в определенном угловом расстоянии, двигатель может быть приказано повернуть определенное количество шагов и механический элемент связан с валом будет двигаться требуемое расстояние.
- Шаговые двигатели обладают высокой крутящий момент на малых угловых скоростей. Это полезно для ускорения полезную нагрузку до скорости.
- Шаговые двигатели имеют высокую удерживающий момент-они имеют свойство быть «самостоятельной блокировки», когда ротор находится на стоянке.
- Шаговые двигатели непосредственно совместим с цифровыми методами контроля, и может быть легко сопряжен с цифровыми Шаг Направление контроллер, микропроцессор или компьютер.
- Шаговые двигатели демонстрируют великолепную точность позиционирования, а тем более важно, ошибки не являются кумулятивными.
- Двигатель конструкция проста и надежная. Есть правило, только два подшипника и двигателя в целом имеет длительную необслуживаемые жизни. По этой причине, это экономически эффективным приводом.
Многие из этих преимущества делают двигатель шаговый полезно в некоторых типах роботов или машин. Разница в цене Серводвигатели также дает шаговых двигателей преимущество.
Недостатки шаговых двигателей
Основным недостатком шаговые двигатели разомкнутой операции — отсутствие обратной связи на должность двигателя (сигнал обратной связи) и его скорость (скорость обратной связи). Этот недостаток имеет критическое влияние на способность достигать высокой точности, и это снижает общий «безопасности» системы.
Как шагового двигателя построены?
Шаговые двигатели имеют много катушки помещены в круг форму. Когда ток проходит через одну из катушек, она становится магнитных (электромагнитных принцип) и, следовательно, перемещает вал двигателя, чтобы это направление. Например анимации:

Типы шаговых двигателей
Существуют два основных вида шаговых двигателей: униполярный и биполярный. Разница между двумя видами заключается в способе электромагнитов связаны между собой. Преимущество однополярного двигатели их упрощенному контролю, но, с другой стороны, их крутящего момента (силы) меньше, чем у биполярного motors.The преимущество биполярных двигателей больше крутящего момента для того же размера двигателя, но с другой стороны более сложные схемы управления необходимо, тот, который может изменить направление тока в каждом шаге.
Существуют гибридные двигатели, которые могут работать как в униполярных и биполярных режимов, с помощью проводов двигателя по-разному.
Управление шагового двигателя
В отличие от регулярных двигатели постоянного тока, управления шаговых двигателей является гораздо более сложным. Здесь Есть не два провода, которые должны быть подключены к источнику питания для того, чтобы спина двигателя. Для того чтобы перейти двигателя в определенном направлении, Stepping последовательности должен быть сформирован. Степпинг последовательность управляемой коммутации обмоток двигателей. Когда катушка, ток течет через катушки провода, и это становится электромагнита. Затем глава двигателя в настоящее время намагниченных до катушки, и движение будет создан.
Пошаговое Последовательности
Есть 4 вида активизации последовательности: Полный Stepping (также называемый пошагового, Double Stepping, Half степпинг, и Micro степпинг.
Управление шагового двигателя с помощью «пошаговое» степпинг метод
Это самый основной метод — включение одного электромагнита каждый раз.
| Шаг номер | Катушка 1 | Катушка 2 | Катушка 3 | Катушка 4 |
| 1 | На | От | От | От |
| 2 | От | На | От | От |
| 3 | От | От | На | От |
| 4 | От | От | От | На |
Эта последовательность требует наименьшего количества энергии и генерирует гладкую движения.
Управление шаговым двигателем с помощью «Дважды Шаг» степпинг метод
В этом методе две катушки включены одновременно.
| מספר צעד | Катушка 1 | Катушка 2 | Катушка 3 | Катушка 4 |
| 1 | На | На | От | От |
| 2 | От | На | На | От |
| 3 | От | От | На | На |
| 4 | На | От | От | На |

Этот метод не создает плавное движение, как и предыдущий метод, и он требует удвоить текущий, но и как вернуть его порождает двойные крутящего момента.
Управление шаговым двигателем с помощью «Half-Шаг» степпинг метод
| מספר צעד | Катушка 1 | Катушка 2 | Катушка 3 | Катушка 4 |
| 1 | На | От | От | От |
| 2 | На | На | От | От |
| 3 | От | На | От | От |
| 4 | От | На | На | От |
| 5 | От | От | На | От |
| 6 | От | От | На | На |
| 7 | От | От | От | На |
| 8 | На | От | От | На |

Этот метод двойников Основная погрешность (в градусах) двигатель может двигаться. Например, является ли двигатель может двигаться в 1,8 градуса за каждый шаг, чем при использовании Half-Stepping можно двигать мотор в 0,9 градуса / шаг. Недостатком в этом способе управления является то, что в половине последовательности, дважды тока требуется (когда две катушки находятся на вместо одной).
Строительство шагового двигателя Контроллер цепи
Самый простой способ для управления шаговым двигателем использует Шаг / Направление контроллера. Такой контроллер получает только два входа — нужное направление вращения (1 = по часовой стрелке, 0 = против часовой стрелки), а также указание о том, чтобы шаг или остаться в текущей позиции (шаг = 1, шаг = 0, соответственно). Сам контроллер генерирует активизации последовательности, как описано в предыдущем разделе.
Контроллер использует мощные транзисторы MOSFET для переключения тока в катушках.
Контроллер имеет 5 входов и 6 выходов:
- 2 входа для логики источник напряжения (5 В, земля)
- 2 входа для источника напряжения двигателей (до 50V 10ampere, земля)
- 2 входа для контроля шага и направления
- 5 выходов для подключения шаговых двигателей
Электронная схема Схема для шагового двигателя Контроллер цепи

CAD-модель
Здесь вы можете увидеть простой компьютер CAD модель контроллера — для этого используется простой микроконтроллер, который генерирует последовательность активизации и 4 мощных транзисторов MOSTFET.
Решение задач по ТОЭ, ОТЦ, Высшей математике, Физике, Программированию.
§ 3.1. Общие сведения о шаговых двигателях
В современных системах управления широко используются устройства, оперирующие с цифровой формой сигнала. Цифровая форма представления сигнала привела к созданию нового типа двигателей – шаговых двигателей (ШД).
Шаговые двигатели – это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи.
Современные ШД являются по сути синхронными двигателями без пусковой обмотки на роторе, что объясняется не асинхронным а частотным пуском ШД. Роторы могут быть возбужденными (активными) и невозбужденными (пассивными).
Рассмотрим принцип действия простейшего однофазного шагового двигателя.
Двухполюсный ротор из магнитомягкой стали с клювообразными выступами помещен в четырехполюсный статор (рис.3.1). Одна пара полюсов выполнена из постоянных магнитов, на другой – находится обмотка управления.
Пока тока в обмотках управления нет, ротор ориентируется вдоль постоянных магнитов и удерживается около них с определенным усилием, которое определяется магнитным потоком полюсов Фпм.
При подаче постоянного напряжения на обмотку управления возникает магнитный поток Фупримерно вдвое больший, чем поток постоянных магнитов. Под действием электромагнитного усилия, создаваемого этим потоком, ротор поворачивается, преодолевая нагрузочный момент и момент, развиваемый постоянными магнитами, стремясь занять положение соосное с полюсами управляющей обмотки. Поворот происходит в сторону клювообразных выступов, т.к. магнитное сопротивление между статором и ротором в этом направлении меньше, чем в обратном.
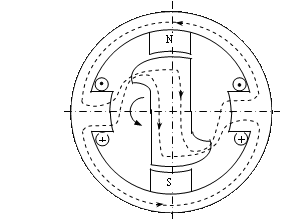
Рис. 3.1. Схема простейшего однофазного ШД
Следующий управляющий импульс отключает напряжение с обмотки управления и ротор поворачивается под действием потока постоянных магнитов в сторону клювообразных выступов.
Достоинством однофазных ШД с постоянными магнитами является простота конструкции и схемы управления. Для фиксации ротора при обесточенной обмотке управления не требуется потребление энергии, угол поворота сохраняет свое значение и при перерывах в питании. Двигатели этого типа отрабатывают импульсы с частотой до 200-300 Гц. Их недостатки – низкий КПД и невозможность реверса.
§ 3.2. Реверсивные шаговые двигатели
Для осуществления реверса зубцы статора и ротора ШД должны быть симметричными (без клювообразных выступов). Рассмотрим работу двухфазного двухполюсного ШД с активным ротором в виде постоянного магнита. Будем считать, что намагничивающие силы фаз (НС) распределены по синусоидальному закону.
При включении фазы под постоянное напряжение (условно положительной полярности) вектор НС статора совпадет с осью фазы А. В результате взаимодействия НС статора с полем постоянного магнита ротора возникнет синхронизирующий момент Мс = Mmaxsinq, где q — угол между осью ротора и вектором НС.
При отсутствии тормозного момента ротор займет положение, при котором его ось совпадет с осью фазы А (рис. 3.2, первый такт). Если теперь отключить фазу А и включить фазу В, вектор НС и ротор повернуться на 90 о (второй такт на рис. 3.2). При включении фазы А на напряжение обратной полярности (третий такт на рис. 3.2) НС и ротор повернутся еще на 90 о и т.д.
Если к ротору ШД приложен момент нагрузки, то при переключении фаз ротор будет отставать от вектора НС на некоторый угол qн= arcsin(Mн/Mmax).
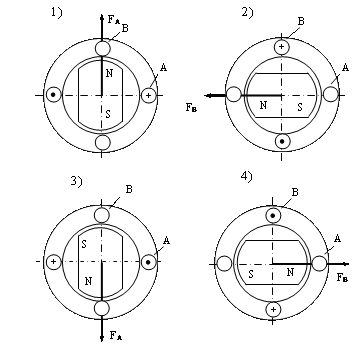
Рис. 3.2. Устойчивые положения ротора при включении фаз
Рассмотренный способ переключения обмоток можно представить в виде табл.1

