
Шаговые двигатели в Уфе
Шаговые двигатели в Уфе
Каталог товаров и услуг, где вы можете купить шаговые двигатели среди 2 предложений поставщиков Уфы. Уточняйте оптовые и розничные цены на шаговые двигатели, наличие на складе, стоимость доставки в ваш регион у компании поставщика.
Ремонт CD, MD, DVD проигрывателей и рекордеров в Уфе

. ) проводков Замена блока лазерной головки Замена лазерной головки Замена микровыключателя (кнопочек) Замена разъема Замена серводвигателя Замена фейдера Замена шагового двигателя Замена шестерни (пасика, направляющей) Замена электронных компонентов Замена энкодера Пропайка трещин Профилактическая чистка Ремонт JOG DIAL Ремонт платы .
Под заказ / Услуга
Ремонт светового оборудования

. микровыключателя (кнопочек,тумблера) Замена патрона для лампы Замена подшипника шагового двигателя Замена предохранителя Замена регулятора чувствительности Замена редукторного двигателя Замена шагового двигателя на COLORGOBO Замена шагового двигателя на PANTILT Замена электронного трансформатора Замена электронных компонентов Пропайка .
Под заказ / Услуга
Драйвер двигателя L293D цена

Драйвер шагового двигателя четырехканальный позволяет управлять одним биполярным шаговым двигателем или двумя моторами постоянного тока. Так же мы продаем электронику для робототехники, сервоприводы, контроллеры Arduino, Raspberry Pi.
В наличии / Розница
Шаговые управляемые приводы с 5-ю фазами

. . Двигатель такого привода имеет встроенный датчик положения вала сигнал с которого подаётся на сервоусилитель, а это существенно повышает точность и динамику сервопривода. Для создания одно или много координатных систем позиционирования используется специальный контроллер позиционирования. Контроллер может управлять и шаговым двигателем и .
Arduino микроконтроллер

Электроника Arduino, Raspberry Pi позволяет создать систему умный дом, робота, 3d принтер. У нас так же есть шаговый двигатель , LCD дисплей, Ардуино датчики, Arduino Nano, NRF24L01, VR box, драйвер шаговых двигателей , датчик движения купить в Кирове. Интернет магазин «Три оси» Arduino в Кирове. Ардуино платы, модули и приводы. Оборудование для .
Дисплей LCD 1602

. Ардуино. Электроника Arduino, Raspberry Pi позволяет создать систему умный дом, робота, 3d принтер. У нас так же есть шаговый двигатель , LCD дисплей, Ардуино датчики, Arduino Nano, NRF24L01, VR box, драйвер шаговых двигателей , датчик движения купить в Кирове. Интернет магазин «Три оси» Arduino в Кирове. Ардуино платы, модули и приводы .
В наличии / Розница
MR-E-40A-QW003 сервоусилитель Mitsubishi Electric

. масс. Поэтому новый сервоусилитель MR-E Sudiver можно считать высокоэффективной универсальной системой, которую можно рассматривать как недорогую альтернативу шаговым двигателям или сервосистемам постоянного тока. Все серводвигатели оснащены инкрементальным датчиком положения и отличаются высокой степенью внутренней защиты. Компактное исполнение .
В наличии / Розница
Ремонт серводвигателей в Тольятти

. Servo motor, ремонт шагового двигателя , ремонт шагового электродвигателя, ремонт энкодера, ремонт инкодера, ремонт енкодера ремонт инкрементального энкодера, ремонт резольвера, ремонт серводвигателя постоянного тока, ремонт серводвигателя переменного тока, намагничевание роторов шаговых двигателей , намагничевание магнитов, перемотка .
Нет в наличии / Услуга
Монтаж и настройка промышленного оборудования

Все для автоматизации технологических процессов: — двигателей (асинхронных, шаговых , сервоприводы). — частотные преобразователи, драйвера шагового двигателя и сервопривода. — программирование ПЛК (Delta, Siemens, ОВЕН) — вывод информации на панель оператора. — подбор пневматики — от фитинга до пневмороботов. — сохранение информации о .
Продам фезерный станок с ЧПУ ТМ20 0605 для обработки стальных деталей

. станки портального типа, разработаны для высокоточной и производительной обработки таких материалов, как сталь, алюминий и композиты. Станок поставляется в варианте с шаговыми двигателями . Технические характеристики: Рабочая область X,Y,Z — 500 х 600 х 200 мм Ход шпинделя по вертикали — 200 мм Рама станка .
1 041 000 руб./шт.
Станок c ЧПУ для стали ТМ26 1212

. станка, повторяемость и скорость обработки.Станок поставляется в варианте с серво двигателями . На данный станок в базовой комплектации устанавливается шпиндель воздушного охлаждения GMT мощностью 7.5 кВт. Станок поставляется в вариантах с серво- шаговыми двигателями и серво приводами. Технические характеристики: Зона обработки — X,Y 1200 х .
2 276 000 руб./шт.
Сервопривод цифровой продаем

Данный сервопривод имеет цифровое управление, что позволяет точно позиционировать объект. Он совместим с платами Ардуино и имеет большой крутящий момент, что позволяет создавать крупные проекты. Детали сервопривода изготовлены из металла, что придает ему прочность. Применяется в любительском авиамоделизме и авто моделизме.
Токарный станок с чпу по металлу тм-тс2050

. фирмы HIWIN (Тайвань) по всем осям Система приводов Шаговые двигатели и прямой привод Шпиндель 100 — 2000 об/мин, 600 Вт Резцедержатель 4х позиционный (ручной) Конус пиноли задней бабки МК-2 Cистема ЧПУ Трех-осевая. Система построена с использованием шаговых драйверов Leadshine – 5А/45В. Интерфейс: USB .
В наличии / Опт и розница
Станок c ЧПУ по металлу ТМ20 0609-КБ

. ) по всем осям Система приводов Cерво- шаговые двигатели . Прямой привод Шпиндель GMT (Тайвань) 7.5 кВт воздушного охлаждения до 18 000 об/мин Смена инструмента Ручная (цанга ER32 — max 20 мм) Система ЧПУ Трех-осевая (с возможностью расширения до 4-х осей). Система построена с использованием серво- шаговых драйверов фирмы Leadshine – 8А/70В .
1 700 000 руб./шт.
Под заказ / Опт и розница
Широкоформатный станок c ЧПУ ТМ10 2513-Z700

. ) по всем осям Система приводов Шаговые двигатели и прямой привод Шпиндель HSD (Италия) / GMT (Тайвань) 3.0 кВт воздушного охлаждения до 18 000 об/мин Смена инструмента Ручная (цанга ER25 — max 16 мм) Система ЧПУ Трех-осевая (с возможностью расширения до 4-х осей). Система построена с использованием шаговых драйверов фирмы Leadshine – 8А/70В .
1 051 000 руб./шт.
Под заказ / Опт и розница
Станок c ЧПУ по металлу ТМ20 0609 с автосменой инструмента и резьбонарезной головкой

. 300 мм Максимальная скорость подачи 7000 мм/мин Передачи и направляющие Прецизионные ШВП и профильные линейные направляющие фирмы HIWIN (Тайвань) по всем осям Система приводов Шаговые двигатели и прямой привод Шпиндель HSD (Италия) 3.7 кВт воздушного охлаждения до 24 000 об/мин Смена инструмента Автоматическая (ISO30, магазин на 5 инструментов .
Шаговый двигатель dvd привода характеристики

- Главная
- Список секций
- Техническое творчество и изобретательство
- ВТОРАЯ ЖИЗНЬ DVD-ROM (ЛАЗЕРНЫЙ ГРАВЕР ИЗ DVD ПРИВОДОВ)

ВТОРАЯ ЖИЗНЬ DVD-ROM (ЛАЗЕРНЫЙ ГРАВЕР ИЗ DVD ПРИВОДОВ)
- Авторы
- Руководители
- Файлы работы
- Презентация
- Наградные документы



Автор работы награжден дипломом победителя II степени
Сложно в наше время найти человека, который никогда не слышал бы слова «лазер». Лазерное излучение обладает удивительными свойствами, ведь недаром писатели-фантасты очень любят писать о лазерном оружии, пушках и других чудесах лазера. Применение лазерного излучения в нашей жизни, приносит большую пользу всему человечеству, если, конечно же, применять его по уму и на благо науки.
Цель данной работы конструирование простейшего лазерного гравировщика на платформе ардуино.
изучить литературу о лазере,
подобрать материалы для изготовления приборов;
собрать простейший лазерный гравировщик;
получить навыки программирования ардуино;
применить прибор на практике
Актуальность данной темы обусловлена постоянным ростом темпа развития лазерных технологий и их внедрения в нашу жизнь, в том числе в повседневной жизни.
Описание проекта: основой идеей нашего проекта является нетрадиционное использование отработавших свой ресурс dvd — rom . Новые возможности их применения для создания сувениров.
Практическая значимость: собранное нами изделие мы можем применять для изготовления гардеробных номерков в школе, которые часто наши ученики теряют, а также для изготовления небольших сувениров для проведения школьных конкурсов и мероприятий.
Объект исследование: привод DVD ROM .
Предмет исследования: лазерный гравировщик.
Гипотеза исследования: Я предполагаю, что части привода DVD ROM можно использовать для конструирования гравировщика.
изучение архитектуры привода DVD ROM ;
выборка главных деталей для гравировщика;
Часть 1. Знакомство с лазером
Альберт Эйнштейн еще 100 лет назад, а именно в 1917 году, предсказал появление лазеров, а в 1960 году американец Т. Мейман изготовил первый квантовый генератор оптических лучей, названный им лазером. Оно состоит из первых букв английской фразы: «Light Amplification by Stimulated Emission of Radiation», что означает: «Усиление света в результате вынужденного излучения». То есть лазер усиливает свет.
Лазер может слабый лучик света превратить в сильный, яркий луч. Он производит настолько сильные лучи, что, собравшись вместе, сфокусировавшись, они могут прожечь крохотные дырки в стальной пластине менее чем за секунду.
Сегодня, спустя 59 лет лазерному оборудованию находят очень широкое применение, практически повсеместно, причем число лазерных технологий и методик растет день ото дня.
Начиная от шоу-бизнеса и до серьезных научно-экспериментальных исследований, лазерная технология с каждым днем становится все более нужной и незаменимой, потому как лазерный луч нельзя заменить какой-либо другой технологией, так как другой такой технологии на сегодняшний день – просто не существует.
Если спросить любого человека о применении лазера, то он сможет назвать несколько лазеров, с которыми сталкиваемся практически ежедневно, это лазерные указки в школах, в офисах лазерные принтеры, считыватели штрих-кодов в супермаркетах, лазерные уровни при ремонте, проигрыватели CD и DVD дисков.
Лазеры широко применяются в медицине и косметологии: восстановление зрения, лечение кожи. Также находят применение для измерения времени, расстояния, температуры, скорости потоков жидкостей и газов. Ну и еще одно направление это использование в сувенирном производстве при лазерной гравировке.
Лазерная гравировка это очень интересный процесс. Нанесение рисунков на поверхность осуществляется не соприкасаясь с поверхностью, то есть бесконтактно, с помощью лазера. Луч лазера легко может наносить картинки на металл, камень, дерево, стекло, картон, акрил.
С помощью лазерного гравера можно:
создавать эксклюзивную сувенирную и рекламную продукцию;
наносить логотипы, надписи и рисунки на ручки, брелоки, чашки;
декорировать металлическую и стеклянную посуду, рамки, предметы быта;
производить наградные сертификаты, дипломы, медали, призы.
Часть II . Практическое выполнение проекта
Для изготовления лазерного гравера нам понадобятся:
2 старых привода DVD — rom от компьютера;
Аппаратная платформа Arduino Uno ;
Плата расширения для Arduino Uno CNCShieldv . 3.0;
корпус для Лазерного модуля;
Блок питания 12 v ;
2 драйвера шаговых моторов A4988 ;
Лист оргстекла 5 мм;
Алюминиевый уголок 30х30 мм;
10)Провода; Болты, гайки, шайбы, пружины.
Кроме этого, необходим инструмент: отвертки, ключ на 8, дрель, паяльник, клеевой пистолет, ножовка по металлу, напильник, ручные тиски, мультиметр, угольник, карандаш, защитные очки.
С начала разбираем приводы DVD , из них нам необходимы только механизмы движения головок.
Получаем направляющие для рабочего стола и лазерного модуля гравера. Для ножек гравера будем использовать резиновые демпфера из привода. Обрезаем шлейфы, припаянные к шаговым двигателям кареток. С помощью мультиметра «прозваниваем» контакты шаговых моторов. В шаговом моторе две обмотки, вращающие двигатель в разных направлениях и, чтобы мотор работал, необходимо припаять провода правильно. Используем провода от фронтальной панели корпуса системного блока компьютера, так как собраны в контакты, что очень удобно при подключении моторов к плате. С помощью клеевого пистолета изолируем контакты мотора.
Размечаем и просверливаем отверстия в листе оргстекла по ножки, направляющую рабочего стола, прикручиваем ножки и направляющую. Из алюминиевого уголка делаем стойки для направляющей лазерного модуля. Выставляем по угольнику стойки и прикручиваем их к основе, затем прикручиваем направляющую.
Механическая часть готова.
Собираем аппаратную часть.
Наклеиваем радиаторы охлаждения на драйвера шаговых двигателей, ставим перемычки для деления шага двигателя, вставляем драйвера в CNCShield , а его – в аппаратную платформу ArduinoUno . Подсоединяем провода от шаговых двигателей к плате. С помощью мультиметра выставляем напряжение питания шаговых моторов.
Монтируем сборку на основание, лазерный гравер готов. Подключаем гравер к компьютеру, с помощью программы Arduino прошиваем в ArduinoUno скетч GRBL 1.1. Для отправки изображений на гравер будем использовать программу Ардуино ЧПУ 2.0.4.
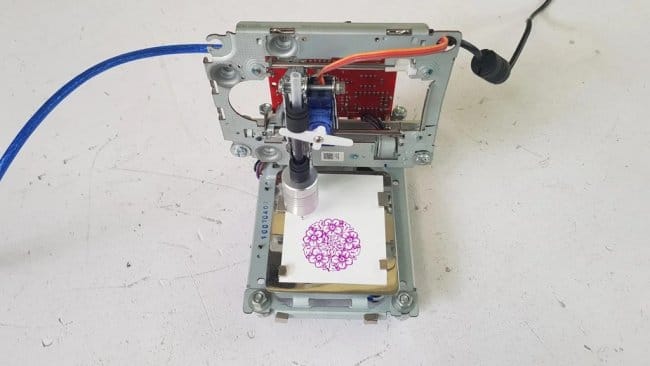
И так, наш станок готов, и мы можем его использовать.
Глава 3. Исследовательская часть
ПОЛУПРОВОДНИКОВЫЙ ЛАЗЕР
твердотельный лазер , в котором в качестве рабочего вещества используется полупроводник . В таком лазере, в отличие от лазеров других типов (в том числе и других твердотельных), используются излучательные переходы не между локализованными уровнями энергии атомов , молекул и ионов, а между разрешёнными энергетическими зонами или подзонами кристалла . В полупроводниковом лазере накачка осуществляется:
непосредственно электрическим током (прямая накачка);
ЖИДКОСТНЫЙ ЛАЗЕР
В твердых веществах можно создать большую концентрацию излучающих атомов и, значит, получить большую энергию с одного кубического сантиметра стержня. Но их трудно делать, они дороги и к тому же могут лопаться из-за перегрева во время работы.
ЛАЗЕРЫ НА КРАСИТЕЛЯХ
Лазеры на красителях обладают одной особенностью. Все лазеры излучают строго на одной длине волны. Это их свойство лежит в самой природе вынужденного излучения атомов, на котором основан весь лазерный эффект. В больших и тяжелых молекулах органических красителей вынужденное излучение возникает сразу в широкой полосе длин волн. Чтобы добиться от лазера на красителях монохроматичности, на пути луча становится светофильтр.
ХИМИЧЕСКИЙ ЛАЗЕР и др.
разновидность газовых лазеров , в которых источником энергии служат химические реакции между компонентами рабочей среды. Химические лазеры непрерывного действия могут достигать высокого уровня мощности и используются в промышленности для резки и создания отверстий.
Изучив типы лазеров, пришли к выводу что для нашей работы нужен полупроводниковый лазер.
Делаем самодельный 3D принтер из CD-ROM и FLOPPY — диска

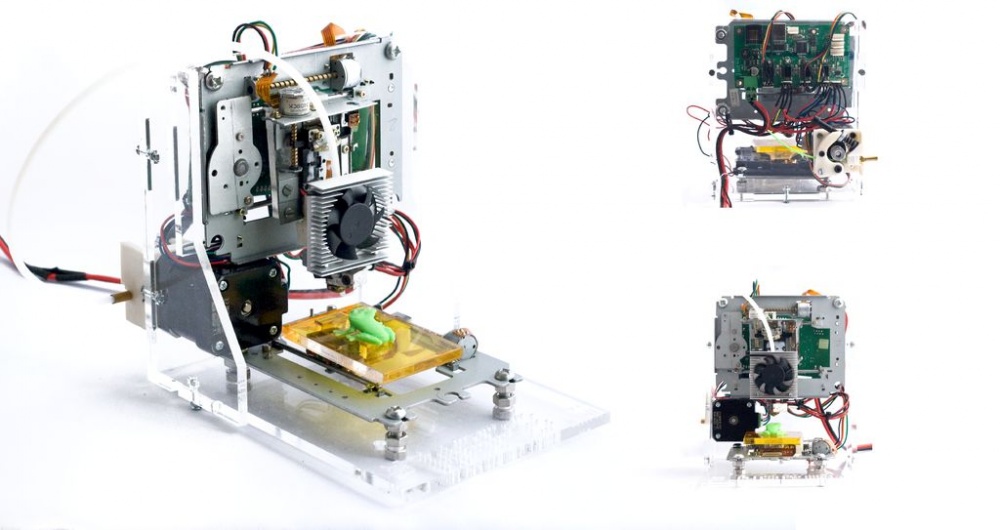
Данная статья взята с зарубежного сайта и переведена мною лично. Предоставил эту статью автор: mikelllc.
Этот проект описывает конструкцию 3D принтера очень низкой бюджетной стоимости, который в основном построен из переработанных электронных компонентов.
Результатом является небольшой формат принтера менее чем за 100 $.
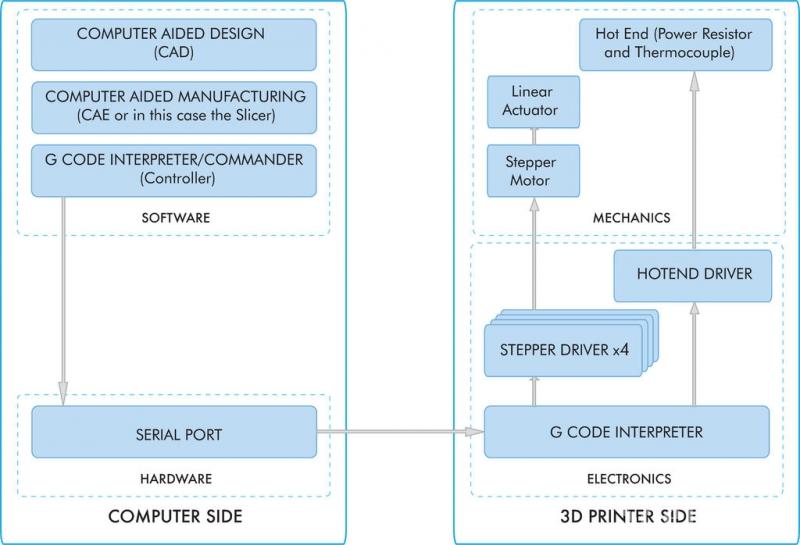
Прежде всего, мы узнаем, как работает общая система ЧПУ (по сборке и калибровке, подшипники, направляющие), а затем научим машину отвечать на инструкции G-кода. После этого, мы добавляем небольшой пластиковый экструдер и даем команды на пластиковую экструзию калибровки, настройки питания драйвера и других операций, которые дадут жизнь принтеру. После данной инструкции вы получите небольшой 3D принтер, который построен с приблизительно 80% переработанных компонентов, что дает его большой потенциал и помогает значительно снизить стоимость.
С одной стороны, вы получаете представление о машиностроении и цифровом изготовлении, а с другой стороны, вы получаете небольшой 3D принтер, построенный из повторно используемых электронных компонентов. Это должно помочь вам стать более опытным в решении проблем, связанных с утилизацией электронных отходов.
Шаг 1: X, Y и Z.

Необходимые компоненты:
- 2 стандартных CD / DVD дисковода от старого компьютера.
- 1 Floppy дисковод.
Мы можем получить эти компоненты даром, обратившись в сервисный центр ремонта. Мы хотим убедиться, что двигатели, которые мы используем от дисководов флоппи, являются шаговыми двигателями, а не двигатели постоянного тока.
Шаг 2: Подготовка моторчика
Компоненты:
3 шаговых двигателя от CD / DVD дисков.
1 NEMA 17 шаговый двигатель, что мы должны купить. Мы используем этот тип двигателя для пластикового экструдера, где нужны большие усилия, необходимые для работы с пластиковой нитью.
CNC электроника: ПЛАТФОРМЫ или RepRap Gen 6/7. Важно, мы можем использовать Sprinter / Marlin Open Firmware. В данном примере мы используем RepRap Gen6 электронику, но вы можете выбрать в зависимости от цены и доступности.
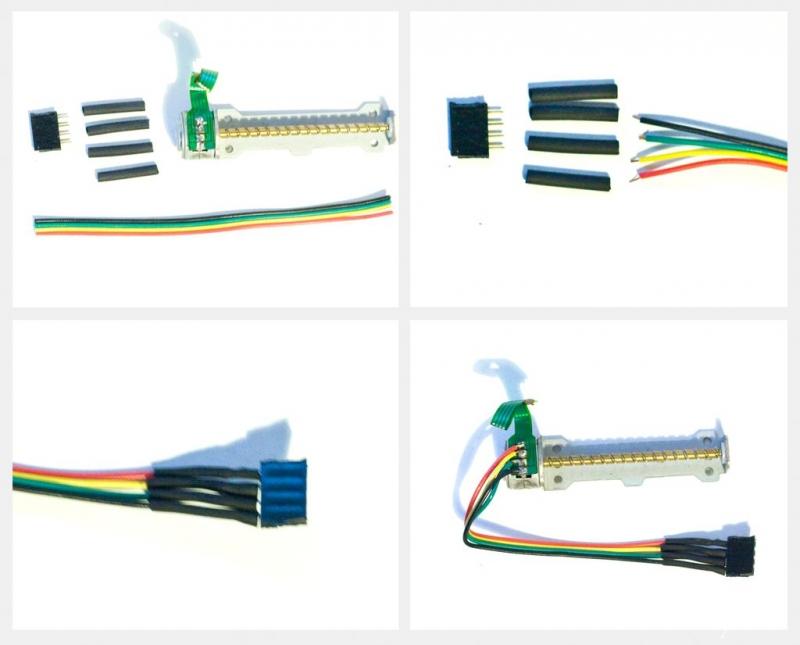
Кабели, розетка, термоусадочные трубки.
Первое, что мы хотим сделать, это как только у нас есть упомянутые шаговые двигатели, мы сможем припаять к ним провода. В этом случае у нас имеется 4 кабеля, для которых мы должны поддерживать соответствующую последовательность цветов (описано в паспорте).
Спецификация для шаговых двигателей CD / DVD: Скачать. Скачать зеркало.
Спецификация для NEMA 17 шагового двигателя: Скачать. Скачать зеркало.
Шаг 3: Подготовка источника питания

Следующий шаг заключается в подготовке питания для того, чтобы использовать его для нашего проекта. Прежде всего, мы соединяем два провода друг с другом (как указано на рисунке), чтобы было прямое питания с выключателем на подставку. После этого мы выбираем один желтый (12V) и один черный провод (GND) для питания контроллера.
Шаг 4: Проверка двигателей и программа Arduino IDE
Теперь мы собираемся проверить двигатели. Для этого нам нужно скачать Arduino IDE (физическая вычислительная среда), можно найти по адресу: http://arduino.cc/en/Main/Software.
Нам нужно, загрузить и установить версию Arduino 23.
После этого мы должны скачать прошивку. Мы выбрали Марлин (Marlin), который уже настроен и может быть загружен Marlin: Скачать. Скачать зеркало.
После того, как мы установили Arduino, мы подключим наш компьютер с ЧПУ контроллера Рампы / Sanguino / Gen6-7 с помощью кабеля USB, мы выберем соответствующий последовательный порт под Arduino инструментов IDE / последовательный порт, и мы будем выбирать тип контроллера под инструменты платы (Рампы (Arduino Mega 2560), Sanguinololu / Gen6 (Sanguino W / ATmega644P — Sanguino должен быть установлен внутри Arduino)).
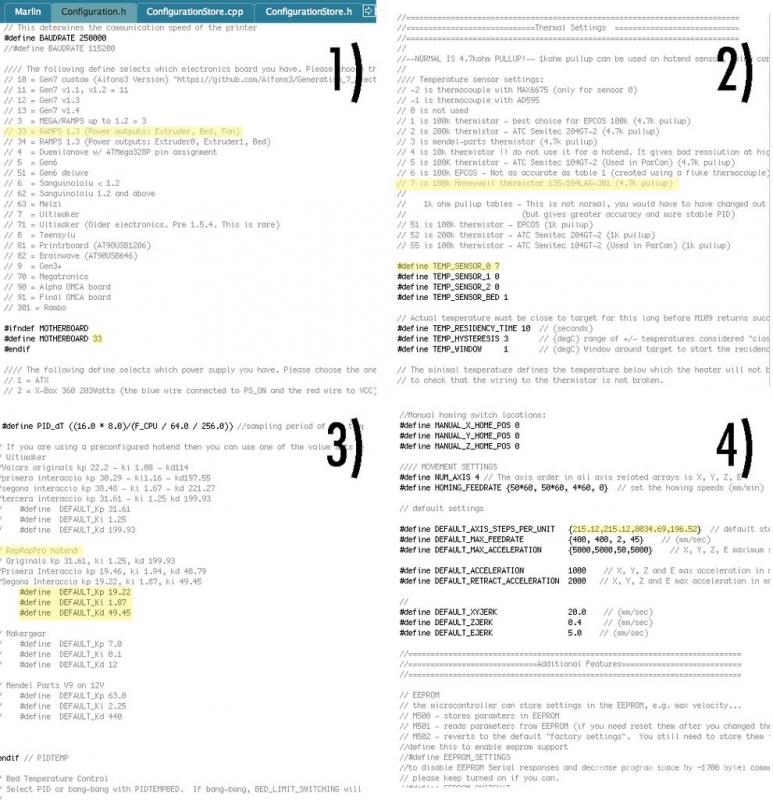
Основное объяснение параметра, все параметры конфигурации находятся в configuration.h файла:
В среде Arduino мы откроем прошивку, у нас уже есть загруженный файл / Sketchbook / Marlin и мы увидим параметры конфигурации, перед тем, как загрузим прошивку на наш контроллер.
1) #define MOTHERBOARD 3, в соответствии с реальным оборудованием, мы используем (Рампы 1,3 или 1,4 = 33, Gen6 = 5, . ).
2) Термистор 7, RepRappro использует Honeywell 100k.
3) PID — это значение делает наш лазер более стабильным с точки зрения температуры.
4) Шаг на единицу, это очень важный момент для того, чтобы настроить любой контроллер (шаг 9)
Шаг 5: Принтер. Управление компьютером.
Управление принтером через компьютер.
Программное обеспечение: существуют различные, свободно доступные программы, которые позволяют нам взаимодействовать и управлять принтером (Pronterface, Repetier, . ) мы используем Repetier хост, который вы можете скачать с http://www.repetier.com/. Это простая установка и объединяет слои. Слайсер является частью программного обеспечения, которое генерирует последовательность разделов объекта, который мы хотим напечатать, связывает эти разделы со слоями и генерирует G-код для машины. Срезы можно настроить с помощью параметров, таких как: высота слоя, скорость печати, заполнения, и другие, которые имеют важное значение для качества печати.
Обычные конфигурации слайсера можно найти в следующих ссылках:
В нашем случае мы имеем профиль configuret Skeinforge для принтера, которые можно интегрировать в принимающую пишущую головку программного обеспечения.
Шаг 6: Регулирование тока и интенсивность

Теперь мы готовы протестировать двигатели принтера. Подключите компьютер и контроллер машины с помощью кабеля USB (двигатели должны быть подключены к соответствующим гнездам). Запустите Repetier хостинг и активируйте связь между программным обеспечением и контроллером, выбрав соответствующий последовательный порт. Если соединение прошло успешно, вы сможете контролировать подключенные двигатели с использованием ручного управления справа.
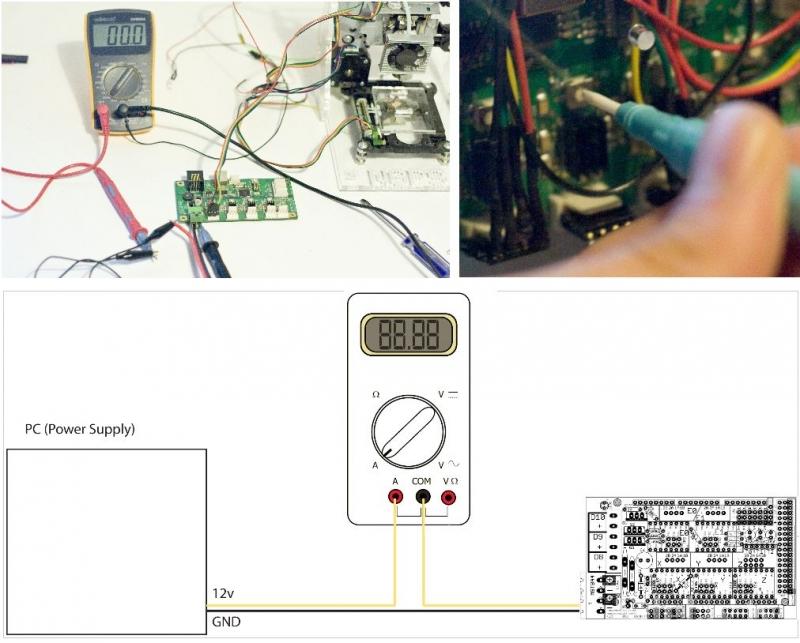
Для того, чтобы избежать перегрева двигателей во время регулярного использования, мы будем регулировать силу тока, чтобы каждый двигатель мог получить равномерную нагрузку.
Для этого мы будем подключать только один двигатель. Мы будем повторять эту операцию для каждой оси. Для этого нам понадобится мультиметр, прикрепленный последовательно между источником питания и контроллером. Мультиметр должен быть установлен в режиме усилителя (текущего) — смотри рисунок.
Затем мы подключим контроллер к компьютеру снова, включите его и измерьте ток при помощи мультиметра. Когда мы вручную активировали двигатель через интерфейс Repetier, ток должен возрасти на определенное количество миллиампер (которые являются текущими для активации шагового двигателя). Для каждой оси ток немного отличается, в зависимости от шага двигателя. Вам придется настроить небольшой потенциометр на управление шагового интервала и установить текущее ограничение для каждой оси в соответствии со следующими контрольными значениями:
Плата проводит ток около 80 мА
Мы подадим ток на 200 мА для Х и Y-оси степперы.
400 мА для Z-оси, это требуется из-за большей мощности, чтобы поднять пишущую головку.
400 мА для питания двигателя экструдера, поскольку он является мощным потребителем тока.
Шаг 7: Создание машины структуры
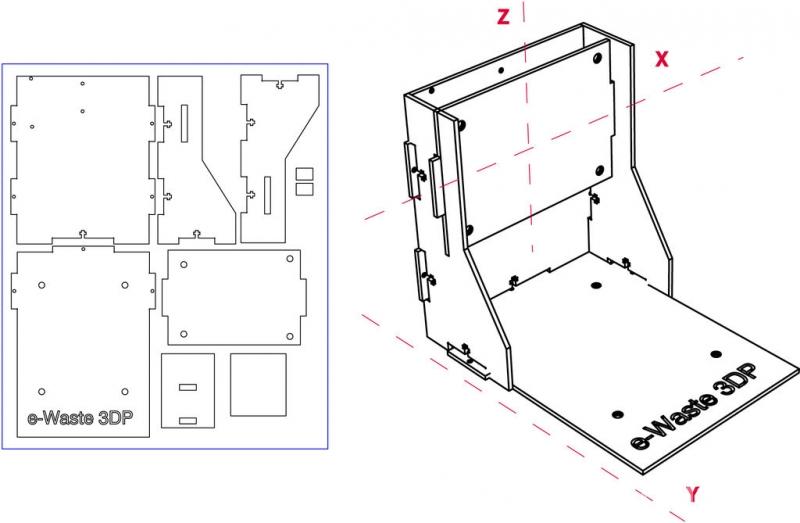
В следующей ссылке вы найдете необходимые шаблоны для лазеров которые вырезают детали. Мы использовали толщиной 5 мм акриловые пластины, но можно использовать и другие материалы, как дерево, в зависимости от наличия и цены.
Лазерная настройка и примеры для программы Auto Cad: Скачать. Скачать зеркало.
Конструкция рамы дает возможность построить машину без клея: все части собраны с помощью механических соединений и винтов. Перед лазером вырезают части рамы, убедитесь, что двигатель хорошо закреплен в CD / DVD дисководе. Вам придется измерять и изменять отверстия в шаблоне САПР.
Шаг 8: Калибровка X, Y и оси Z
Хотя скачанная прошивка Marlin уже имеет стандартную калибровку для разрешения оси, вам придется пройти через этот шаг, если вы хотите точно настроить свой принтер. Здесь вам расскажут про микропрограммы которые позволяют задать шаг лазера вплоть до миллиметра, ваша машина на самом деле нуждается в этих точных настройках. Это значение зависит от шагов вашего двигателя и по размеру резьбы движущихся стержней ваших осей. Делая это, мы убедимся, что движение машины на самом деле соответствует расстояниям в G-кода.
Эти знания позволят вам построить CNC-машину самостоятельно в независимости от составных типов и размеров.
В этом случае, X, Y и Z имеют одинаковые резьбовые шпильки так калибровочные значения будут одинаковыми для них (некоторые могут отличаться, если вы используете разные компоненты для разных осей).
Мы должны будем рассчитать, сколько шагов двигателя необходимы для перемещения 1 мм каретки. Это зависит от:
- Радиуса шкива.
- Шага на оборот нашего шагового двигателя.
Микро-шаговые параметры (в нашем случае 1/16, что означает, что за один такт сигнала, только 1/16 шага выполняется, давая более высокую точность в систему).
Мы устанавливаем это значение в прошивке (stepspermillimeter).
Используя интерфейс Controller (Repetier) мы настраиваем ось Z, что позволяет двигаться на определенное расстояние и измерять реальное смещение.
В качестве примера, мы подадим команду, чтобы он двигался на 10 мм и измерим смещение 37.4 мм.
Существует N количество шагов, определенных в stepspermillimeter в прошивке (X = 80, Y = 80, Z = 2560, EXTR = 777,6).
Новое значение должно быть 682,67.
Мы повторяем это в течение 3 или 4 раз, перекомпилируя и перезагружая прошивки для контроллера, мы получаем более высокую точность.
В этом проекте мы не использовали конечные установки для того, чтобы сделать более точным машину, но они могут быть легко включены в прошивку и она будет готова для нас.
Мы готовы к первому испытанию, мы можем использовать перо, чтобы проверить, что расстояния на чертеже верны.
Шаг 9: Экструдер
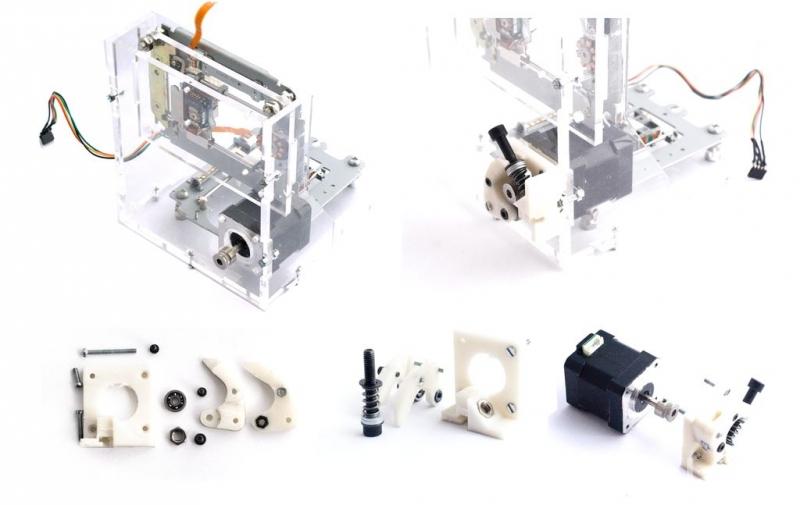
Привод для нити состоит из NEMA 17 шагового двигателя и МК7 / MK8 типа приводной шестерни, возможно вам придется ее купить. Вы также должны будете иметь драйвера, чтобы 3D-печати экструдера шла прямо от привода, можно скачать здесь.
Нить накала втягивается в экструдер со стороны управляющих нитей, затем подается в нагревательную камеру внутрь гибкой тефлоновой трубки.
Мы будем собирать прямой привод, как показано на рисунке, прикрепив шаговый двигатель к главной раме.
Для калибровки, поток пластика должен соответствовать кусочку пластиковой нити и расстоянию (например 100 мм), положить кусочек ленты. Затем перейдите к Repetier Software и нажмите выдавливать 100 мм, реальное расстояние и повторить Шаг 9 (операцию).
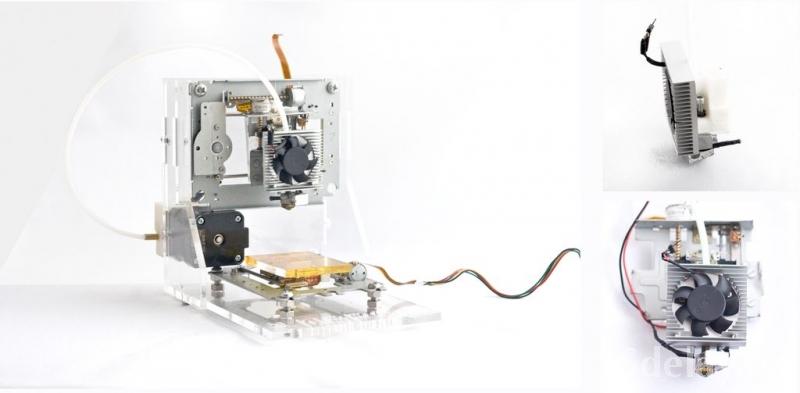
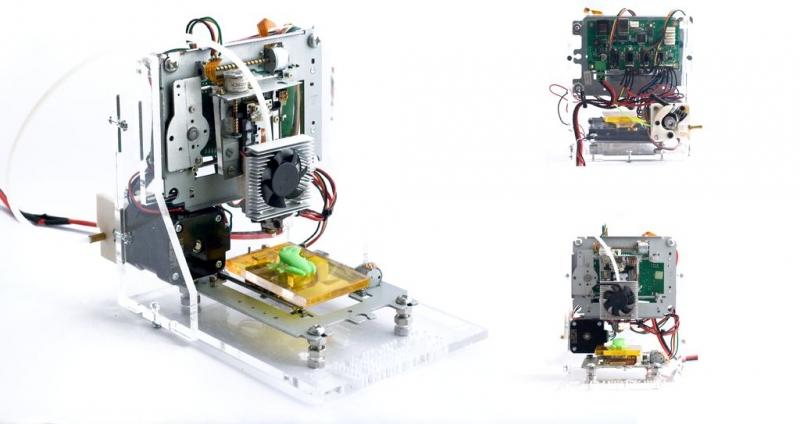
Шаг 10: Печатаем первый объект

Теперь аппарат должен быть готов для первого теста. Наш экструдер использует пластиковую нить диаметром 1.75 мм, которую легче выдавливать и более она более гибкая, чем стандартная диаметром 3 мм. Мы будем использовать PLA пластик, который является био-пластиком и имеет некоторое преимущество по сравнению с ABS: он плавится при более низкой температуре, что делает печать более легкой.
Теперь, в Repetier, мы активируем нарезки профилей, которые доступны для резки Skeinforge. Скачать. Скачать зеркало.
Мы печатаем на принтере небольшой куб калибровки (10x10x10 мм), он будет печатать очень быстро, и мы сможем обнаружить проблемы конфигурации и моторный шаг потери, путем проверки фактического размера печатного куба.
Так, для начала печати, открыть модель STL и нарезать его, используя стандартный профиль (или тот, который вы скачали) с резки Skeinforge: мы увидим представление нарезанного объекта и соответствующий G-код. Мы подогреваем экструдер, и когда он нагреется до температуры плавления пластика (190-210C в зависимости от пластической марки) выдавим немного материала (пресс выдавливания), чтобы увидеть, что все работает должным образом.
Мы устанавливаем начало координат относительно экструзионной головки (х = 0, у = 0, z = 0) в качестве разделителя используем бумагу, головка должна быть как можно ближе к бумаге, но не касалась ее. Это будет исходное положение для экструзионной головки. Оттуда мы можем начать печать.
У вас есть вопросы, свое видение или реальный опыт по построению 3D принтеров? Пожалуйста напиши нам в комментариях
e-waste_test_02
Мини-ЧПУ из DVD-приводов и степлера
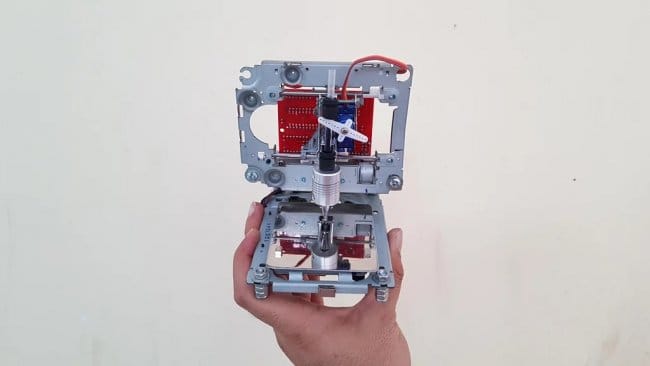

В этой статье мастер-самодельщик расскажет нам, как он сделал ЧПУ из DVD-приводов для рисования. Сборка проста, дешева и не занимает много времени. Для изготовления станка мастер использовал следующие
Инструменты и материалы:
-Плата расширения CNC Shield V4;
-Arduino Nano;
-DVD приводы — 2 шт;
-Серводвигатель SG90;
-Провода;
-Алюминиевый уголок 20 x 20 x 1,4 мм — длина 120 мм;
-Степлер канцелярский;
-Блок питания 12 В;
-Алюминиевая муфта с гибким валом, размер внутреннего отверстия: 5 мм x 8 мм (или 8 мм x 8 мм);
-Латунная соединительная гайка L-10мм 2 шт;
-Латунная соединительная гайка L-5мм 2 шт;
-Болта + гайки + шайбы M4 x 50 мм 2 шт;
-Болта + гайки + шайбы M4 x 25 мм 3 шт;
-Болта + гайки + шайбы M4 x 20 мм 2 шт;
-Болты + гайки + шайбы M2 x 40 мм 1 шт;
-Болты + гайки + шайбы M2 x 5 мм 2 шт;
-Кабельные стяжки;
-Ножовка;
-Сверлильный станок;
-Ручная шлифовальная машина;
-Клеевой пистолет;
-Паяльное оборудование;

Шаг первый: шаговые двигатели DVD / CD привода
В интернете мастер нашел характеристики шагового двигателя DVD / CD -привода.
Параметр двигателя: Угол шага: 18 °
Напряжение: 5 В
Сопротивление: 14 Ом
Фаза: 2-2
Режим привода: биполярный
Макс. Частота пуска: 900pps
Макс. Скорость вращения: 1200pps
Удерживающий момент; 40
Диаметр ходового винта: Φ3
Шаг ходового винта: 3
Размер внешнего диаметра двигателя: 15 мм
Так выглядит двигатель в разобранном виде.
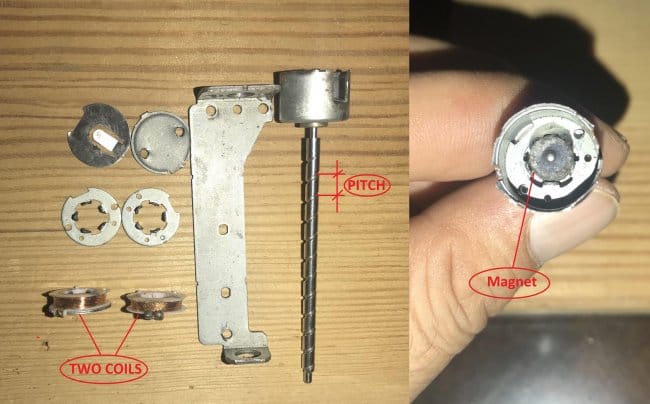
Шаговый двигатель работает при напряжении 5 В постоянного тока. Нужно измерить сопротивление двух катушек с помощью мультиметра, чтобы проверить, в хорошем ли он состоянии.
В проекте использовалось два разных типа DVD / CD-плееров, один использовался для оси X с сопротивлением катушки шагового двигателя 14 Ом, а другой использовался для оси Y с сопротивлением катушки 10 Ом.
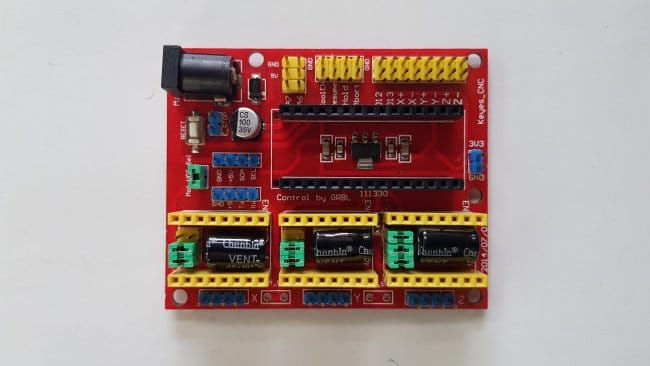
Шаг второй: плата расширения CNC Shield V4
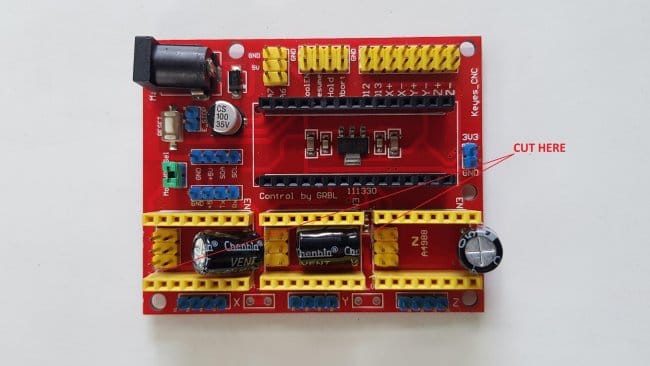
CNC Shield V4.0 имеет 3 слота на печатной плате для модулей привода шаговых двигателей и один слот для Arduino Nano. Т.е он может управлять 3 шаговыми двигателями по команде Arduino Nano. CNC Shield V4.0 имеет несколько контактов GPIO, доступных для подключения к другим модулям, таким как концевой выключатель, а также к интерфейсу I2C или последовательной связи. Питание для 3 модулей привода шагового двигателя и платы Nano подается через разъем внешнего питания (12 В постоянного тока).
Плату нужно настроить для дальнейшей работы. Нужно настроить как аппаратное, так и программное обеспечение, чтобы использовать прошивку GRBL и настроить режим микрошагов для A4988. Как это сделать, можно посмотреть здесь.
Нужно установить перемычки.
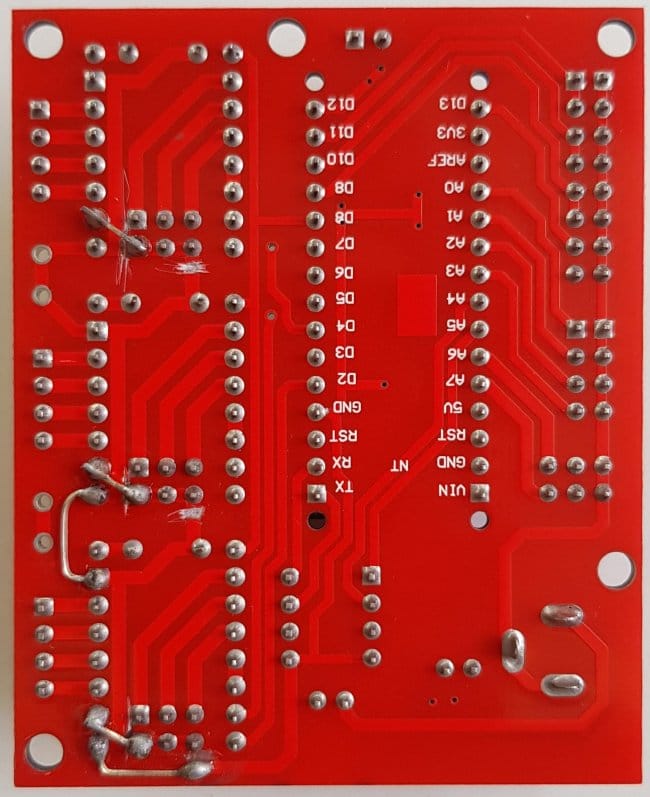
Контакты, подключенные к входам «STEP» и «DIRECTION» драйверов шагового двигателя, неверны по сравнению с исходными определениями GRBL. CNC Shield V4.0 работает Arduino Nano, поэтому можно исправить определения контактов «STEP» и «DIRECTION» в файле «cpu_map_atmega328p.h», расположенном в папке grbl , следующим образом:
Шаг третий: драйвер A4988
A4988 — это микрошаговый драйвер двигателя со встроенным переводчиком для упрощения работы. Он предназначен для работы биполярных шаговых двигателей в полно-шаговых, полу-шаговых, четверть-шаговых, восьмых и шестнадцати-шаговых режимах с выходной мощностью до 35 В и ± 2 А.
Можно управлять шаговым двигателем с помощью всего 2 контактов контроллера: один для управления направлением вращения, а другой — для управления шагами.
Во многих приложениях микрошаговый режим может повысить производительность системы, а также снизить сложность и стоимость системы по сравнению с полно-шаговыми и полу-шаговыми методами. Микрошаговый режим может использоваться для решения всех проблем с резонансом, вибрацией и шумом в системе шагового двигателя, а также для повышения точности и разрешения шага.
По правилам, чем больше микрошагов, тем плавней движения, но ниже крутящий момент, и наоборот. Мастер пробовал режим 1/16 микрошагов, но в конце концов выбрал 1/8 микрошагов, что является хорошим сочетанием плавного движения и крутящего момента.
Каждый поворот шагового двигателя DVD / CD изначально разделен на 20 шагов с углом 18 ° / шаг (1 поворот = 360 градусов | 360/20 = 18 °). При установке режима с разрешением 1/8 шага на A4988, каждое вращение шагового двигателя DVD / CD будет разделено на 160 шагов с углом 2,25 ° / шаг, что сделает вращение шагового двигателя намного более плавным.
ОГРАНИЧЕНИЕ ТОКА
Подстроечный потенциометр на плате A4988 можно использовать для установки ограничения тока шагового двигателя. Следует обратить внимание на следующее:
В платах шаговых драйверов A4988 используются различные резисторы RCS, в зависимости от производителя. Обычно RCS может быть 0,05 Ом (с маркировкой «R050»), 0,1 Ом (с маркировкой «R100») или 0,2 Ом (с маркировкой «R200»). RCS на данной плате управления A4988: 0,1 Ом.
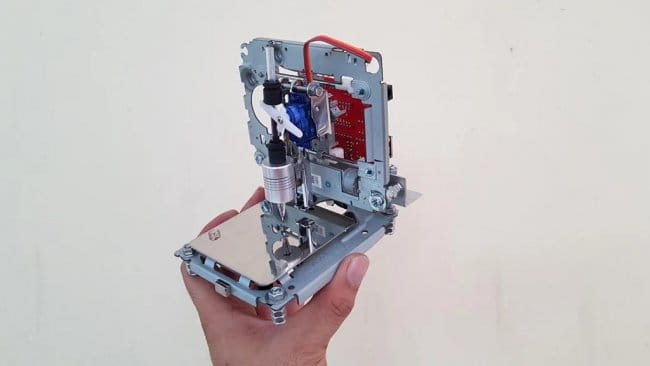
Шаг четвертый: установка оси X И Y
В этом проекте мастер в основном использовал болты для соединения деталей.
Первый шаг к созданию этого мини-плоттера с ЧПУ — это разобрать два привода DVD / CD.
Далее мастер припаял 4-х проводные кабели к 2-м шаговым двигателям, определив их обмотки и клеммы.
Он измерил длину привода — ось X, которая будет расположена горизонтально, затем вырезал алюминиевый уголок 20 x 20 x 1,4 мм по длине. В данном случае — 120 мм.
Дальше просверлил в алюминиевом уголке 6 отверстий:
— Два отверстия для крепления оси Y с помощью M4x50.
— Два отверстия для крепления оси X с помощью M4x25.
— Два оставшихся отверстия для крепления CNC Shield V4.0 через латунные соединительные гайки L-10 мм.

